一种可用于应急救援的长航时渔用无人快艇
文献发布时间:2023-06-19 12:11:54
技术领域
本发明涉及水域救援技术领域,尤其涉及一种可用于应急救援的长航时渔用无人快艇。
背景技术
随着科学技术的不断发展,用于水上的作业设备越来越多。目前国内正处于将传统养殖业转化为现代化、自动化养殖业的转型时期。许多渔业从业者缺乏具有时效性的养殖管理方案,发展进度不快,自动化管理方面比较欠缺。但水域如果完全实现无人化管理,又会存在一定的风险,不仅有被盗渔者偷捕的财产损失风险,还存在如果有人落水无人救援的生命安全风险,因此渔业的自动化与规避风险方面难以两全。
发明内容
本发明要解决的技术问题是克服现有技术的不足,提供一种简单实用、自动化程度高、时效性好和安全性能好的可用于应急救援的长航时渔用无人快艇。
为解决上述技术问题,本发明提出的技术方案为:
一种可用于应急救援的长航时渔用无人快艇,包括设置在艇身上的管理系统、救援系统、用于控制艇身航行方向的航行系统和与控制终端通讯连接的通讯装置,所述管理系统、救援系统、航行系统和通讯装置通讯连接;
所述管理系统包括用于定期检测水质信息并将水质信息发送至通讯装置的水质检测模块,还包括投食模块,所述投食模块在到达预设时间点或受到控制终端命令时启动投食;
所述救援系统包括用于对艇身周围设定区域进行定时扫描并得到目标位置的雷达模块、用于对艇身周围设定区域内目标位置进行人体识别的摄像模块,雷达模块扫描得到目标位置后发送信号至摄像模块,摄像模块接收该信号并调整摄像头角度,进行目标位置的识别。
作为上述技术方案的进一步改进:
所述雷达模块和摄像模块均与航行系统通讯连接,所述雷达模块扫描得到目标位置同时将目标位置信息发送至航行系统,所述航行系统接收目标位置信息控制艇身向目标位置移动直至艇身与目标位置间距小于设定距离。
所述救援系统还包括无人机装置,所述摄像模块包括艇身上的高清摄像头和搭载于无人机装置上的高清摄像头。
可用于应急救援的长航时渔用无人快艇还包括至少一个设置在岸边的供人触发的信标,所述信标与通讯装置通讯连接,所述通讯装置将信标被触发后发送的触发信号发送至救援系统。
每个所述信标内对应设置有该信标位于的设定区域的水域位置信息,各信标内的水域位置信息全面覆盖所述艇身所处水域,所述信标被触发后将内置的水域位置信息通过通讯装置发送至航行系统,所述航行系统控制艇身向接收的水域位置信息航行。
每个所述信标上设有操作面板,所述操作面板上设有触发按钮和摇杆,所述通讯装置将信标触发按钮被按动触发后发送的触发信号还发送至航行系统,航行系统接收触发信号后依据摇杆方向控制艇身航行。
所述信标上设有用于识别按动触发按钮人员面孔的并根据识别结果开放摇杆控制权限的面部识别装置。
可用于应急救援的长航时渔用无人快艇还包括设置在艇身上的动力装置,所述动力装置包括太阳能电池板和静音电机,所述太阳能电池板向静音电机提供动力供艇身航行。
救援系统还包括设置在艇身上的救生装置,所述救生装置包括充气泵、储气罐和至少一个折叠充气式救生圈。
所述艇身上设有收费码显示装置,所述摄像模块还用于对钓鱼人员进行识别,根据识别结果控制收费码显示装置显示收费码。
与现有技术相比,本发明的优点在于:
本发明的可用于应急救援的长航时渔用无人快艇,包括设置在艇身上的管理系统、救援系统、用于控制艇身航行方向的航行系统和与控制终端通讯连接的通讯装置。管理系统包括用于定期检测水质信息并将水质信息发送至通讯装置的水质检测模块,水质检测模块能够实时检测水体水质变化,方便管理人员查看并对存在风险的水质进行适当调节,保证渔区质量和产量。管理系统还包括投食模块,投食模块在到达预设时间点或受到控制终端命令时启动投食。通过水质检测模块和投食模块能够保证渔区实现自动化、无人化管理,大大降低了所需的人力物力,有效助推渔业发展。
艇身设置的救援系统包括雷达模块和摄像模块,雷达模块可以对艇身所在的区域进行大范围的扫描,从而快速得到障碍物以及一个甚至多个可疑目标,实现大覆盖面积的搜索,并发送信号启动摄像模块,将目标位置发送至摄像模块,摄像模块接收该信号并调整摄像头角度,进行目标位置的识别,可以通过人体识别技术对目标位置进行扫描,从而精确判定目标是否为落水人员。雷达模块和摄像模块结合能够兼具监控范围大、效率高以及准确度高的优点,能够实现精确定位搜救,大大提高了救援速度和成功率。应用于渔区既能够保证渔区实现自动化、无人化管理,又能提高渔区的安全性,避免生命安全风险。
附图说明
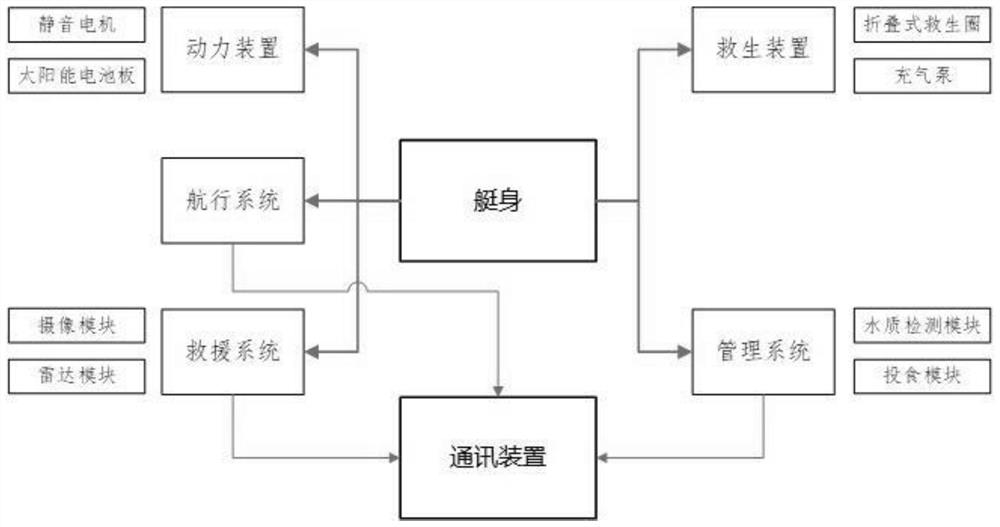
图1是本发明的可用于应急救援的长航时渔用无人快艇的示意图;
图2是本发明的可用于应急救援的长航时渔用无人快艇的救援流程示意图。
具体实施方式
为了便于理解本发明,下文将结合说明书附图和较佳的实施例对本发明做更全面、细致地描述,但本发明的保护范围并不限于以下具体实施例。
实施例:
如图1和图2所示,本实施例的可用于应急救援的长航时渔用无人快艇,包括设置在艇身上的管理系统、救援系统、用于控制艇身航行方向的航行系统和与控制终端通讯连接的通讯装置,航行系统和通讯装置通讯连接。管理系统包括用于定期检测水质信息并将水质信息通过通讯装置发送至控制终端的水质检测模块,水质检测模块能够实时检测水体水质变化,方便管理人员查看并对存在风险的水质进行适当调节,保证渔区质量和产量。管理系统还包括投食模块,投食模块在到达预设时间点或受到控制终端命令时启动投食;通过水质检测模块和投食模块能够保证渔区实现自动化、无人化管理,大大降低了所需的人力物力,有效助推渔业发展。
救援系统包括用于对艇身周围设定区域进行定时扫描并得到目标位置的雷达模块、用于对艇身周围设定区域内目标位置进行人体识别的摄像模块,雷达模块扫描得到目标位置后发送信号至摄像模块,摄像模块接收该信号并启动;雷达模块和摄像模块均与航行系统通讯连接。雷达模块可以对艇身所在的区域进行大范围的扫描,从而快速得到障碍物以及一个甚至多个可疑目标,实现大覆盖面积的搜索,并发送信号启动摄像模块,将目标位置发送至摄像模块,摄像模块接收该信号并调整摄像头角度,进行目标位置的识别,可以通过人体识别技术对目标位置进行扫描,从而精确判定目标是否为落水人员,对落水人员实施营救,对障碍物执行避障。雷达模块和摄像模块结合能够兼具监控范围大、效率高以及准确度高的优点,能够实现精确定位搜救,大大提高了救援速度和成功率。应用于渔区既能够保证渔区实现自动化、无人化管理,又能提高渔区的安全性,避免生命安全风险。
本实施例中,控制终端可以连接有电脑、显示器以及手机等方便工作人员查看的设备。当救援系统的雷达模块自动检测到可疑的目标位置时,雷达模块可以发送该位置至航行系统,航行系统移动艇身向该位置接近,以便于摄像模块近距离检测是否为落水人员。摄像模块也可以通过通讯装置将采集的图像发送至控制终端,以便工作人员进行观察,方便渔场管理人员执行远程指导。
本实施例中,雷达模块和摄像模块均与航行系统通讯连接,雷达模块能够识别障碍物的方位,与航行系统结合能够规划出合理的航行路径,这种设置方式为现有技术中常用的路径规划方式,在此不做赘述。当雷达模块扫描得到目标位置时,同时将目标位置信息发送至航行系统,航行系统接收目标位置信息控制艇身向目标位置移动直至艇身与目标位置间距小于设定距离,以达到摄像模块能够清晰的进行人体识别的距离。
本实施例中,救援系统还包括无人机装置,摄像模块包括艇身上的高清摄像头和搭载于无人机装置上的高清摄像头。这种设置方式不仅提供了多角度的摄像扫描,进一步提高扫描结果的准确度,还能避免艇身上的摄像头受到水或泥沙等遮蔽物的影响,造成扫描失败等问题。艇身上的高清摄像头为高清变焦摄像头,无人机装置上的高清摄像头为360°近距离高清摄像头,当雷达扫描获得运动的目标时,变焦摄像头可以根据雷达获得的方位角度与距离,自动进行摄像头的角度和焦距调整,进行远距离摄像。
本实施例中,还包括至少一个设置在岸边的供人触发的信标,信标与通讯装置通讯连接,通讯装置将信标被触发后发送的触发信号发送至救援系统。当岸边的人发现有人落水时,可以触发信标,因此快艇救援系统接收触发信号立即启动雷达模块,可以第一时间进行人员识别和救援,大大提高了救援的及时性。
本实施例中,每个信标内对应设置有该信标位于的设定区域的水域位置信息,各信标内的水域位置信息全面覆盖艇身所处水域,信标被触发后,发送触发信号的同时,将内置的水域位置信息通过通讯装置发送至航行系统,航行系统控制艇身向接收的水域位置信息航行。这种设置方式使水域内每一个位置发生落水事件时,岸边的人员都能够及时触发信标,发送确切的水域位置给快艇,使快艇能够第一时间赶到落水位置进行救援。
本实施例中,还可以在每个信标上设置操作面板,操作面板上设有触发按钮和摇杆,通讯装置将信标触发按钮被按动触发后发送的触发信号还发送至航行系统,航行系统接收触发信号后依据摇杆方向控制艇身航行。这样使岸边的人员能够直接控制快艇的航行方向,进一步提高了救援位置的准确性。
本实施例中,信标上设有用于识别按动触发按钮人员面孔的并根据识别结果开放摇杆控制权限的面部识别装置。当有人按动触发按钮后,面部识别装置拍摄人员照片,既可以将人员照片与设置在面部识别装置内部的有权限的人员照片比对,也可以将人员照片发送至控制终端,通过控制终端进行比对判定是否授权。当人员按动触发按钮设定时间内,面部识别装置没有做出应答时,自动开放摇杆的控制权限,避免故障导致延误救援。
本实施例中,还包括设置在艇身上的动力装置,动力装置包括太阳能电池板和静音电机,太阳能电池板向静音电机提供动力供艇身航行,以及为各系统提供动力。太阳能电池板受到照射便可以储存电能,能源充足,保证快艇的航行时长;静音电机则尽量减小航行中的噪声,保证摄像装置采集画面的质量。
本实施例中,救援系统还包括设置在艇身上的救生装置,救生装置包括充气泵、储气罐和至少一个折叠充气式救生圈,充气泵能够与储气罐结合对救生圈快速充气,提供快速救援;折叠救生圈能够节省占用空间,方便存储。
本实施例中,无人快艇还包括报警装置,当艇身上的雷达模块在夜间识别到区域内存在载人游船时并经过摄像模块进一步确认之后,报警装置启动,报警装置可以设置声、光报警器,以警示盗渔者。还可以通过通讯装置向控制终端发送报警信息,通知渔区管理人员维护渔区。
本实施例中,艇身上还设有收费码显示装置,摄像模块还用于对钓鱼人员进行识别,根据识别结果控制收费码显示装置显示收费码。当识别为钓鱼人员而非工作人员时,显示装置显示收费码,钓鱼人员可以通过收费码支付费用。进一步方便渔场的自动化管理。
以上所述仅是本发明的优选实施方式,本发明的保护范围并不仅局限于上述实施例。对于本领域的技术人员来说,在不脱离本发明的技术构思前提下所得到的改进和变换也应视为本发明的保护范围。
- 一种可用于应急救援的长航时渔用无人快艇
- 一种运用于长航时无人机载荷的多源定位信息融合方法