一种薄膜天线展开测试装置及其测试方法
文献发布时间:2023-06-19 13:48:08
技术领域
本发明涉及展开测试技术领域,尤其涉及一种薄膜天线展开测试装置及其测试方法。
背景技术
卫星薄膜天线是一种新型的天线形式,区别于传统固面、索网天线等形式,薄膜天线通常采用蚀刻在薄膜表面的微带贴片形成设计的电磁辐射特性。卫星薄膜天线在发射阶段收拢为较小的体积,在轨运行时则需要通过展开机构展开为较大的口径,因此薄膜天线的展开机构是保证卫星正常运行的关键部件。
为了确保薄膜天线的展开机构能太空中,能够稳定可靠的工作,所以,在使用前,必须在地面上,通过展开测试装置对展开机构进行测试。
但是,目前的薄膜天线展开测试装置,在对薄膜天线起到支撑作用的伸展臂做展开测试时,无法快速测量不同压紧力下的伸展臂展开参数,以及不同尺寸的伸展臂的展开参数,导致无法为后续优化参数提供依据。
发明内容
本发明的目的是为了解决现有技术中无法快速测量不同压紧力下的伸展臂展开参数,以及不同尺寸的伸展臂的展开参数等问题,而提出的一种薄膜天线展开测试装置及其测试方法。
为了实现上述目的,本发明采用了如下技术方案:
一种薄膜天线展开测试装置,包括平台,还包括:第一位移调节器和第二位移调节器,均位于平台上;支撑架,固定连接在第一位移调节器的输出端,所述支撑架上固定连接有可拆卸的卷收筒,伸展臂绕卷在卷收筒内;导轨,位于平台上,所述导轨上滑动连接有滑动块,所述滑动块上设有第三压力传感器,所述伸展臂远离卷收筒的一端固定在第三压力传感器上;所述第二位移调节器为围绕卷收筒圆周分布的多组设计,每个所述第二位移调节器的输出端均连接有第一支架,所述第一支架上连接有处于水平状态的连接筒;用于对伸展臂保持时刻压紧状态的压紧组件,所述压紧组件通过第一压力传感器与连接筒相连接。
为了固定卷收筒,优选地,所述支撑架上螺纹连接有螺纹杆,所述支撑架上滑动连接有用以固定卷收筒的固定板,所述固定板与螺纹杆转动连接。
为实现对伸展臂进行展开和收卷,优选地,所述卷收筒内转动连接有卷收杆,所述伸展臂的一端固定在卷收杆上并且绕卷在卷收杆表面,所述卷收筒侧壁设有卷收槽,所述伸展臂贯穿卷收槽,所述支撑架上设有气缸,所述气缸的输出端连接有马达,所述卷收杆底部设有驱动槽,所述驱动槽和马达的输出端的截面均为方形。
为了对伸展臂进行压紧,优选地,所述压紧组件包括连接板和压力轮,所述压力轮转动连接在连接板上,所述卷收筒侧壁设有压力槽,所述压力轮可在压力槽内移动,所述压力轮与伸展臂侧壁相贴,所述连接板通过第一压力传感器与连接筒相连接。
为了对伸展臂进行压紧,优选地,所述压紧组件包括连接板和滑动杆,所述连接板上固定连接有压杆,所述滑动杆滑动连接在卷收筒侧壁,所述滑动杆延伸到卷收筒外侧的一端固定连接有贴合板,所述贴合板与压杆相贴合并通过固定螺钉固定,所述滑动杆延伸到卷收筒内侧的一端固定连接有压力杆,所述压力杆上设有滚球,所述滚球与伸展臂侧壁相贴,所述连接板通过第一压力传感器与连接筒相连接。
为了便于调节第一压力传感器,优选地,所述连接筒为中空结构,所述连接筒内滑动连接有滑块,所述滑块与连接筒内壁之间设有弹簧,所述连接筒内还滑动连接有调节杆,所述调节杆位于滑块远离弹簧的一端,所述连接筒侧壁连接有用于固定调节杆的固定螺杆,所述第一压力传感器与调节杆远离连接筒的一端相连接。
为了测试压平力,优选地,所述平台上分别设有第三位移调节器和支撑杆,所述第三位移调节器和支撑杆分别位于伸展臂的两侧,所述第三位移调节器的输出端连接有第二支架,所述第二支架上连接有水平状态的推杆,所述推杆靠近伸展臂的一端连接有第二压力传感器,所述第二压力传感器侧壁连接有压板,所述压板与伸展臂侧壁之间设有可依靠重力下落的压块,所述支撑杆上转动连接有转动轴,所述转动轴与伸展臂相贴。
为了对伸展臂进行支撑,优选地,所述平台上设有第四位移调节器,所述第四位移调节器的输出端连接有支撑板,所述支撑板上转动连接有滚轮,所述滚轮与伸展臂底部相贴。
为了测试移动数据,优选地,所述平台上设有高速摄影机,所述滑动块上设有加速度传感器。
一种薄膜天线展开测试装置的测试方法,采用以下步骤操作:
首先,将装有伸展臂的卷收筒固定在支撑架上;然后,将伸展臂远离卷收筒的一端固定在位于滑动块上的第三压力传感器上;其次,通过马达驱动卷收杆转动,对伸展臂进行展开测试;其次,通过第二位移调节器,调整压紧组件对伸展臂施加的压紧力;其次,通过第一压力传感器,实时检测压力值的大小,观测处于不同压紧力状态下,伸展臂的展开状态,进而为后续优化对伸展臂压紧力的大小,提供依据和参考;最后,跟换不同尺寸的伸展臂,通过不同尺寸的伸展臂所表现的具体参数及波动情况,为后续伸展臂具体参数的优化设计,提供依据和参考。
与现有技术相比,本发明提供了一种薄膜天线展开测试装置及其测试方法,具备以下有益效果:
1、该薄膜天线展开测试装置及其测试方法,伸展臂在展开过程中,压紧组件在第二位移调节器的作用下,通过对伸展臂施加不同的压紧力,从而判断伸展臂在展开过程中的波动情况,和是否出现伸展臂折弯失稳现象,进而为后续的伸展臂具体参数的优化设计以及其在展开过程中,压紧力的大小,提供依据和参考,确保展开机构稳定的工作。
2、该薄膜天线展开测试装置及其测试方法,通过第二位移调节器和气缸的相互配合,可测试不同尺寸的伸展臂,当跟换伸展臂尺寸时,可通过第二位移调节器将伸展臂移动到相对于滑动块和滚轮的一个合适的位置,然后启动气缸,使马达的输出端与驱动槽相互卡和,驱动卷收杆转动。
附图说明
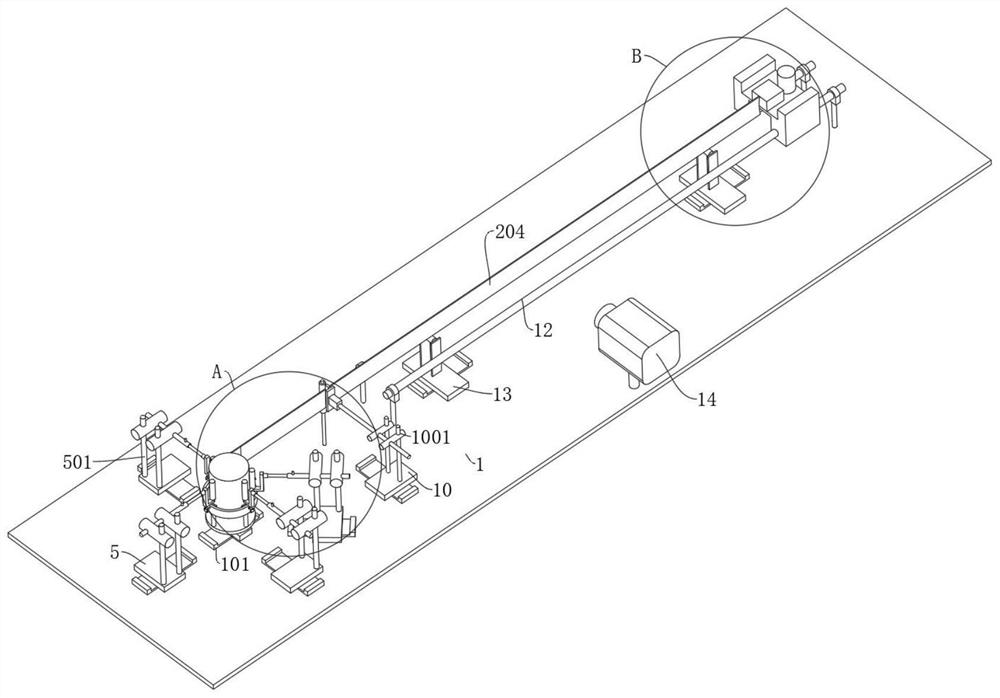
图1为本发明提出的一种薄膜天线展开测试装置及其测试方法的结构示意图一;
图2为本发明提出的一种薄膜天线展开测试装置及其测试方法图1中A部分的放大图;
图3为本发明提出的一种薄膜天线展开测试装置及其测试方法图1中B部分的放大图;
图4为本发明提出的一种薄膜天线展开测试装置及其测试方法的结构示意图二;
图5为本发明提出的一种薄膜天线展开测试装置及其测试方法图4中C部分的放大图,
图6为本发明提出的一种薄膜天线展开测试装置及其测试方法调节杆的结构示意图;
图7为本发明提出的一种薄膜天线展开测试装置及其测试方法驱动槽的结构示意图;
图8为本发明提出的一种薄膜天线展开测试装置及其测试方法压力轮的结构示意图;
图9为本发明提出的一种薄膜天线展开测试装置及其测试方法压力杆的结构示意图。
图中:1、平台;101、第一位移调节器;2、支撑架;201、卷收筒;202、卷收杆;203、卷收槽;204、伸展臂;3、气缸;301、马达;302、驱动槽;4、螺纹杆;401、固定板;5、第二位移调节器; 501、第一支架;6、连接筒;601、调节杆;602、滑块;603、弹簧; 604、固定螺杆;7、连接板;701、第一压力传感器;8、压力轮;801、压力槽;9、压杆;901、滑动杆;902、贴合板;903、固定螺钉;904、压力杆;10、第三位移调节器;1001、第二支架;1002、推杆;1003、第二压力传感器;1004、压板;1005、压块;11、支撑杆;1101、转动轴;12、导轨;1201、滑动块;1202、第三压力传感器;1203、加速度传感器;13、第四位移调节器;1301、支撑板;1302、滚轮;14、高速摄影机。
具体实施方式
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。
在本发明的描述中,需要理解的是,术语“上”、“下”、“前”、“后”、“左”、“右”、“顶”、“底”、“内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。
实施例1:
参照图1-9,一种薄膜天线展开测试装置,包括平台1,还包括:第一位移调节器101和第二位移调节器5,均位于平台1上;支撑架 2,固定连接在第一位移调节器101的输出端,支撑架2上固定连接有可拆卸的卷收筒201,伸展臂204绕卷在卷收筒201内;导轨12,位于平台1上,导轨12上滑动连接有滑动块1201,滑动块1201上设有第三压力传感器1202,伸展臂204远离卷收筒201的一端固定在第三压力传感器1202上;第二位移调节器5为围绕卷收筒201圆周分布的多组设计,每个第二位移调节器5的输出端均连接有第一支架501,第一支架501上连接有处于水平状态的连接筒6;用于对伸展臂204保持时刻压紧状态的压紧组件,压紧组件通过第一压力传感器701与连接筒6相连接。
导轨12上还设有位移标尺,可判断滑动块1201和伸展臂204的移动距离。
展开力实验中,将伸展臂204展开到不同长度下,暂时固定,可通过第三压力传感器1202,测量此时伸展臂204末端展开力的大小。
支撑架2上螺纹连接有螺纹杆4,支撑架2上滑动连接有用以固定卷收筒201的固定板401,固定板401与螺纹杆4转动连接。
卷收筒201内转动连接有卷收杆202,伸展臂204的一端固定在卷收杆202上并且绕卷在卷收杆202表面,卷收筒201侧壁设有卷收槽203,伸展臂204贯穿卷收槽203,支撑架2上设有气缸3,气缸3 的输出端连接有马达301,卷收杆202底部设有驱动槽302,驱动槽 302和马达301的输出端的截面均为方形。
测试时,将装有伸展臂204的卷收筒201放置在支撑架2上,转动螺纹杆4,通过固定板401对其固定。
将伸展臂204远离卷收筒201的一端固定在位于滑动块1201上的第三压力传感器1202上,启动气缸3,将马达301的输出端卡在驱动槽302内,启动马达301,带动卷收杆202转动,将伸展臂204 展开。
气缸3为电动伸缩杆,行程50mm,推力60N,伸缩速度为15mm/s。
与此同时,启动第二位移调节器5,通过连接筒6带动压紧组件移动,对正在展开的伸展臂204进行时刻压紧,通过第一压力传感器 701感应的压力值,观测处于不同压紧力状态下,伸展臂204的展开状态,进而为后续的压紧力的大小,提供依据和参考,确保展开机构稳定的工作。
第一压力传感器701测量精度为0.01N,采样频率为1500Hz。
第二位移调节器5为四组设计,分别位于卷收筒201的12:00、 9:00、3:00、6:00方向,其中3:00方向压紧组件距离伸展臂204较近,为避免对展开过程造成干涉,采用斜压紧的方式,实验中对倾斜角度进行测量,并取垂直压紧力的分量。
卷收杆202由304钢制成,上下两端配有微型轴承,对于伸展臂 204展开实验来说,卷收杆202最重要的参数是其转动惯量,通过称重、测量尺寸的方式,对转动惯量进行了计算。
通过第二位移调节器5和气缸3的相互配合,可对不同尺寸的伸展臂204进行测试,通过测试不同尺寸的伸展臂204所表现的具体参数及波动情况,为后续伸展臂204的具体参数的优化设计,提供依据和参考,确保展开机构稳定的工作。
实施例2:
参照图8,在实施例1的基础上,进一步的是,
本实施例公开了一种压紧组件,压紧组件包括连接板7和压力轮 8,压力轮8转动连接在连接板7上,卷收筒201侧壁设有压力槽801,压力轮8可在压力槽801内移动,压力轮8与伸展臂204侧壁相贴,连接板7通过第一压力传感器701与连接筒6相连接。
第二位移调节器5通过连接筒6带动连接板7移动,连接板7带动压力轮8向卷收杆202轴心方向移动,对伸展臂204进行压紧。
实施例3:
参照图9,在实施例1的基础上,进一步的是,
本实施例公开了一种压紧组件,压紧组件包括连接板7和滑动杆 901,连接板7上固定连接有压杆9,滑动杆901滑动连接在卷收筒 201侧壁,滑动杆901延伸到卷收筒201外侧的一端固定连接有贴合板902,贴合板902与压杆9相贴合并通过固定螺钉903固定,滑动杆901延伸到卷收筒201内侧的一端固定连接有压力杆904,压力杆 904上设有滚球,滚球与伸展臂204侧壁相贴,连接板7通过第一压力传感器701与连接筒6相连接。
第二位移调节器5通过连接筒6带动连接板7移动,连接板7通过压杆9和贴合板902推动滑动杆901移动,滑动杆901带动压力杆 904卷收杆202轴心方向移动,通过转动在压力杆904上的滚球对伸展臂204进行压紧。
实施例4:
参照图6,在实施例2和实施例3的基础上,进一步的是,
连接筒6为中空结构,连接筒6内滑动连接有滑块602,滑块602 与连接筒6内壁之间设有弹簧603,连接筒6内还滑动连接有调节杆 601,调节杆601位于滑块602远离弹簧603的一端,连接筒6侧壁连接有用于固定调节杆601的固定螺杆604,第一压力传感器701与调节杆601远离连接筒6的一端相连接。
根据卷收筒201外径的大小,当需要调整压紧组件的位置时,滑动调节杆601,移动到合适位置后,通过固定螺杆604进行固定。
连接筒6内滑动的滑块602,以及与滑块602相抵的弹簧603,可提高连接筒6的稳定性。
连接筒6远离调节杆601的一端,还可以螺纹连接有驱动螺杆,驱动螺杆与滑块602转动连接,通过驱动螺杆与固定螺杆604相互配合,进一步提高调节杆601的固定效果,防止压紧组件在与伸展臂 204相贴时,调节杆601向后移动。
实施例5:
参照图1-9,在实施例4的基础上,进一步的是,
平台1上分别设有第三位移调节器10和支撑杆11,第三位移调节器10和支撑杆11分别位于伸展臂204的两侧,第三位移调节器 10的输出端连接有第二支架1001,第二支架1001上连接有水平状态的推杆1002,推杆1002靠近伸展臂204的一端连接有第二压力传感器1003,第二压力传感器1003侧壁连接有压板1004,压板1004与伸展臂204侧壁之间设有可依靠重力下落的压块1005,支撑杆11上转动连接有转动轴1101,转动轴1101与伸展臂204相贴。
当进行压平力测量时,启动第三位移调节器10,通过推杆1002 带动压板1004移动,将压块1005放置在压板1004和伸展臂204之间,通过转动轴1101和压板1004的相互配合,挤压压块1005,直到将伸展臂204压平,观察第二压力传感器1003的压力值,然后通过第三位移调节器10,退回压板1004,直到压块1005脱落,然后停止,再次观察第二压力传感器1003的压力值,以及在此过程中,用游标卡尺测量压缩位移,结合两次的第二压力传感器1003的压力值,判断出压平力。
实施例6:
参照图1-9,在实施例5的基础上,进一步的是,
平台1上设有第四位移调节器13,第四位移调节器13的输出端连接有支撑板1301,支撑板1301上转动连接有滚轮1302,滚轮1302 与伸展臂204底部相贴。
平台1上设有高速摄影机14,滑动块1201上设有加速度传感器 1203。
在测试过程中,启动第四位移调节器13,通过滚轮1302对伸展臂204进行支撑,提高稳定性。
通过加速度传感器1203,可有效得知,展开的加速度数值。
通过高速摄影机14,记录动态展开过程,并通过图像处理得到展开过程中位移和速度的时间历程数据。
高速摄影机14采用Phantom v1611高速摄像机,使用广角镜头,同时搭配专用分析软件对图像进行处理,根据实际调试结果,为达到视场对滑轨全覆盖,同时兼顾图像精度,采用500fps的频率进行测量,在后处理过程中,结合导轨12上的标尺,可以得到滑动块1201运行的速度时间历程数据。
实施例7:
在实施例6的基础上,进一步的是,
根据实际使用需求,当伸展臂204在太空中展开以后就不需要收卷时。
在测试时,可以将气缸3和马达301舍去,伸展臂204采用具有弹性压缩储能的材料制成,当压紧组件向卷收筒201外侧移动时,伸展臂204通过卷收槽203慢慢向外侧展开,与此同时,进行各项测试。
实施例8:
参照图1-9,在实施例6的基础上,进一步的是,
一种薄膜天线展开测试装置的测试方法,采用以下步骤操作:
首先,将装有伸展臂204的卷收筒201固定在支撑架2上;然后,将伸展臂204远离卷收筒201的一端固定在位于滑动块1201上的第三压力传感器1202上;其次,通过马达301驱动卷收杆202转动,对伸展臂204进行展开测试;其次,通过第二位移调节器5,调整压紧组件对伸展臂204施加的压紧力;其次,通过第一压力传感器701,实时检测压力值的大小,观测处于不同压紧力状态下,伸展臂204的展开状态,进而为后续优化对伸展臂204压紧力的大小,提供依据和参考;最后,跟换不同尺寸的伸展臂204,通过不同尺寸的伸展臂204 所表现的具体参数及波动情况,为后续伸展臂204具体参数的优化设计,提供依据和参考。
第一位移调节器101和第四位移调节器13,均为三自由度位移调节组件,可实现x、y、z轴三方向位移调节。
第二位移调节器5和第三位移调节器10均为二自由度位移调节组件上,可实现x、y轴双方向位移调节。
卷收筒201由铝合金加工而成,卷收槽203宽度为0.5mm。
导轨12和滑动块1201在展开实验中起到限位的作用,滑块上连接有第三压力传感器1202和加速度传感器1203等,总质量约 283.48g,经过多次测量取均值,导轨12和滑动块1201之间的静摩擦力约0.45N,动摩擦力约0.31N,同时,由于导轨12和滑动块1201 之间的位置关系、润滑情况不同,不同组展开实验时摩擦力有所不同,每次实验时均单独对动摩擦力的时间历程数据进行采集。
通过逐步调整压紧组件针对伸展臂204的压力值,直到伸展臂 204无法展开为止,观察此时的第一压力传感器701压力值,得到最大压力临界值。
当压力值大于最大压力临界值时,会形成较大的摩擦力,导致伸展臂204无法展开。
以上所述,仅为本发明较佳的具体实施方式,但本发明的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本发明揭露的技术范围内,根据本发明的技术方案及其发明构思加以等同替换或改变,都应涵盖在本发明的保护范围之内。
- 一种薄膜天线展开测试装置及其测试方法
- 平面展开类天线电缆高低温扭力矩测试装置及测试方法