保持干式变压器和配电柜搬运过程平衡和精定位的方法
文献发布时间:2024-04-18 19:48:15
技术领域
本发明属于设备应用技术领域,具体涉及保持干式变压器和配电柜搬运过程平衡和精定位的方法。
背景技术
随着工业自动化的快速发展,对于搬运机器人的研制,普遍集中在机械部件研发及结构优化、控制的稳定性和安全性,以及场景环境下的智能化运动设计等方面,对于如何满足行业需求、降低成本、提高效率的前提下搭载大重量负载并实现在狭窄空间下的准确移动、精准定位,始终是智能搬运机器人技术突破的追求目标。
基于以上分析,对于配电房干式变压器、配电柜搬运机器人在搬运过程引入自动化的控制后,往往需要利用其自带的传感设备进行物料的平衡控制和定位操作,同时对于搬运过程的控制,还需要搬运车能够自适应的去通过路径的规划去完成搬运作业,为此,提出一种适用于干式变压器和配电柜搬运过程平衡和精定位的方法是很有必要的。
发明内容
本发明的目的在于提供保持干式变压器和配电柜搬运过程平衡和精定位的方法,以解决上述背景技术中提出的问题。
为实现上述目的,本发明提供如下技术方案:保持干式变压器和配电柜搬运过程平衡和精定位的方法,包括以下步骤:
S1:开始系统初始化操作,判断系统是否完成初始化操作;
S2:若未完成初始化操作,判断是否已经完成三次连续判断,若未超过继续进行初始化操作,若已经超过则报错停机;
S3:若完成初始化,则开始启动机器人的装载作业;
S4:根据装载的机器人进行平衡控制,并判断机器人上的干式变压器和配电柜是否处于平衡状态,若干式变压器和配电柜未处于平衡状态,则判断是否已经完成三次连续判断,若未超过继续进行自动平衡控制操作,若已经超过则进入手控平衡设置,设置完毕后进入下一步;
S5:若处于平衡状态,则进入定位控制操作,并判断机器人上的干式变压器和配电柜的定位状态是否正确,若干式变压器和配电柜未处于完好的定位状态,则判断是否已经完成三次连续判断,若未超过继续进行自动定位控制操作,若已经超过则进入手控定位设置,设置完毕后进入下一步;
S6:完成定位控制后,启动对干式变压器和配电柜的启动放置,将干式变压器和配电柜放置到目标位置,此时对干式变压器和配电柜是否放置成功进行判断,若未放置成功,则判断是否已经完成三次连续判断,若未超过继续进行自动自动放置操作,若已经超过则进入手控放置设置,完成放置后结束一轮工序。
优选的,干式变压器和配电柜搬运前还需要完成先后作业顺序任务及可行路径方案,包括场所探测、确定定位点、路径规划和最优路径选取。
优选的,所述场所探测包括对搬运目的地点的环境建模和障碍获取。
优选的,所述确定定位点通过手动输入或在搬运目标位进行设定传感器进行定位处理。
优选的,所述路径规划通过利用建模完成的环境场所和定位点。
优选的,所述最优路径选取指的是确定干式变压器和配电柜搬运过程中可以经过的路径,并通过对各路径的时间长短判断、路径复杂度判断得到干式变压器和配电柜搬运过程中的最优路径。
与现有技术相比,本发明的有益效果是:本发明以倾角传感器和激光模块反馈的角度、速度及位置值作为运动反馈指标,调整车体轮系与平衡吊架电机PWM占空比差值,实现车体的大负载平衡控制以及目标精准定位跟踪。
附图说明
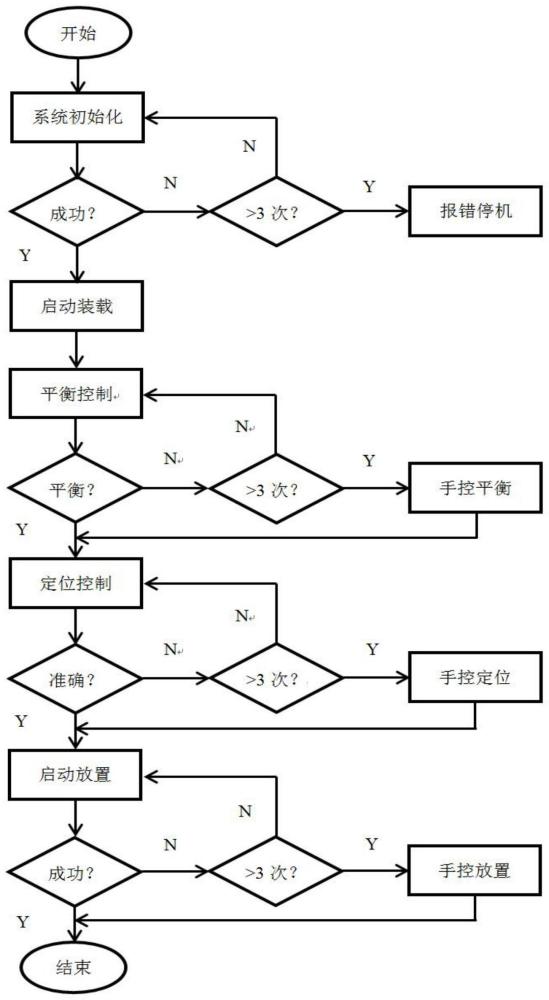
图1为本发明的流程示意图。
具体实施方式
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
请参阅图1,本发明提供一种技术方案:保持干式变压器和配电柜搬运过程平衡和精定位的方法,包括以下步骤:
S1:开始系统初始化操作,判断系统是否完成初始化操作;
S2:若未完成初始化操作,判断是否已经完成三次连续判断,若未超过继续进行初始化操作,若已经超过则报错停机;
S3:若完成初始化,则开始启动机器人的装载作业;
S4:根据装载的机器人进行平衡控制,并判断机器人上的干式变压器和配电柜是否处于平衡状态,若干式变压器和配电柜未处于平衡状态,则判断是否已经完成三次连续判断,若未超过继续进行自动平衡控制操作,若已经超过则进入手控平衡设置,设置完毕后进入下一步;
S5:若处于平衡状态,则进入定位控制操作,并判断机器人上的干式变压器和配电柜的定位状态是否正确,若干式变压器和配电柜未处于完好的定位状态,则判断是否已经完成三次连续判断,若未超过继续进行自动定位控制操作,若已经超过则进入手控定位设置,设置完毕后进入下一步;
S6:完成定位控制后,启动对干式变压器和配电柜的启动放置,将干式变压器和配电柜放置到目标位置,此时对干式变压器和配电柜是否放置成功进行判断,若未放置成功,则判断是否已经完成三次连续判断,若未超过继续进行自动自动放置操作,若已经超过则进入手控放置设置,完成放置后结束一轮工序。本实施例中,优选的,干式变压器和配电柜搬运前还需要完成先后作业顺序任务及可行路径方案,包括场所探测、确定定位点、路径规划和最优路径选取。本实施例中,优选的,所述场所探测包括对搬运目的地点的环境建模和障碍获取。本实施例中,优选的,所述确定定位点通过手动输入或在搬运目标位进行设定传感器进行定位处理。本实施例中,优选的,所述路径规划通过利用建模完成的环境场所和定位点。本实施例中,优选的,所述最优路径选取指的是确定干式变压器和配电柜搬运过程中可以经过的路径,并通过对各路径的时间长短判断、路径复杂度判断得到干式变压器和配电柜搬运过程中的最优路径。
尽管已经示出和描述了本发明的实施例,对于本领域的普通技术人员而言,可以理解在不脱离本发明的原理和精神的情况下可以对这些实施例进行多种变化、修改、替换和变型,本发明的范围由所附权利要求及其等同物限定。