一种生物智能穿戴设备及其控制方法
文献发布时间:2023-06-19 09:33:52
技术领域
本发明涉及智能穿戴领域技术领域,尤其涉及一种生物智能穿戴设备及其控制方法。
背景技术
随着电子智能技术的发展,各种穿戴式设备层出不穷,比如各种智能腕带、智能手表、智能眼镜等。而随着市场需求的提高,对穿戴式设备的各种功能要求更高,需要对穿戴式设备进行功能拓展。现有的生物智能穿戴设备可以对人体的生物特征进行测量,比如测量人的心率,血压等。
人体分泌物如汗液、阴道分泌物等可以检测身体健康状况,尤其对于女性,由于生理结构的不同,女性人体分泌物中包括多种微生物,微生物主要由细菌、真菌、原虫和病毒组成,包括革兰氏阳性需氧菌,如乳杆菌、棒状杆菌;革兰氏阴性需氧菌,如大肠埃希菌;厌氧菌,如消化链球菌、梭形杆菌等;此外,还有一些病原体,如支原体及念球菌等。女性人体分泌物中微生物处于一种协调、平衡的状态,但受雌激素水平、月经、妊娠和年龄等因素,会使微生物群随之发生一些改变。
人体分泌物检测对于女性生殖系统感染、肿瘤的诊断、雌激素水平的判断以及性传播疾病等具有重要的临床价值。通过人体分泌物的检测,可以判断并评估女性身体健康状况。但是,这些生物智能穿戴设备的功能都仅限于一些常规的生物特征的测量,如体温、心率等,无法对人体分泌物进行取样和测量,从而使得这些智现有技术的检测需要进行专门采样并使用专门的医学检测设备,整个检测过程耗时繁琐,同时由于女性人体分泌物受诸多因素影响,检测结果并不能准确的反应人体身体健康状况信息。
发明内容
有鉴于此,有必要提供一种生物智能穿戴设备,用以解决现有设备无法采集使用者皮肤分泌物的问题。
本发明提供一种生物智能穿戴设备,包括穿戴基础、设置于所述穿戴基础上的处理中心及生物特征获取单元;所述穿戴基础包括连接机构,所述连接机构用于将所述生物智能穿戴设备固定于使用者身上,所述连接机构具有安全提示模块和对所述生物智能穿戴设备供电的供电模块;所述生物特征获取单元用于获取使用者的生物特征,所述生物特征包括体温、心率和皮肤分泌物水平。
具体的,所述生物特征获取单元包括生物特征传感器,所述生物特征传感器包括采集模块和检测模块;所述采集模块具有可产生的微流体的取样部,所述检测单元包括与所述取样部通信连接或光学间接的信号获取部。
进一步的,所述取样部包括流体囊、动力源和取样囊,所述流体囊用于盛放取样液;所述流体囊具有输入肢和输出肢,所述输入肢与所述动力源传动连接以将所述流体囊的取样液输出至所述输出肢,所述输出肢上设置有分子探针,所述分子探针用于与皮肤分泌物进行结合并产生光学信号或电信号;所述取样囊通过所述输入肢与所述流体囊连通,以向所述流体囊提取取样液。
具体的,所述动力源为流体压力产生机构,用于从所述输入肢向所述流体囊内输入正压或负压动力,以在所述输出肢产生正压或负压。
进一步的,所述取样部还包括设置于所述输入肢和所述输出肢上的微流阀,所述微流阀包括阀壳和阀体,所述阀壳内部形成相互交叉的液流路径和气流路径,所述阀体转动连接于所述液流路径和所述气流路径交叉部位;所述动力源为所述气流路径提供正压气流或负压气流。
具体的,所述液流路径和所述气流路径相互垂直,在二者相互交叉的部位形成一用于阀体转动的转动腔;所述阀体内开设连通通路;所述转动腔与所述阀体的紧密配合的部位形成有止位槽,所述阀体与所述转动腔紧密配合部位凸出形成止位部;当所述气流路径内的气流驱动所述阀体转动时,带动所述止位部转动至抵靠于所述止位槽内时,对应的所述连通通路与所述液流路径连通或阻断。
可选的,所述输出肢成吸盘结构,所述流体囊与所述吸盘结构连通以对所述吸盘结构通入正压或负压,以吸附于皮肤表面,并对皮肤表面喷洒取样液。
可选的,所述输出肢具有多个,成柔性,每一所述输出肢内形成有微流通道,每一所述微流通道均形成与所述流体囊连通,所述流体囊内的正压或者负压由所述微流通道喷出,带动所述输出肢摆动至抚过皮肤表面。
本发明还提供所述的生物智能穿戴设备的控制方法,包括以下步骤:当所述生物智能穿戴设备获得供电并穿戴与使用者身上时,控制所述生物特征获取单元获取使用者的生物特征,并将所述生物特征输入至所述处理中心,所述处理中心经过处理和判断后输出控制指令至所述安全提示模块,以发出报警信息;其中所述报警信息包括可视化信息、机械振动信息和声音信息。
其中,本发明还提供所述的生物智能穿戴设备的控制方法包括取样步骤;所述生物特征获取单元包括生物特征传感器,所述生物特征传感器包括采集模块和检测模块;所述采集模块具有可产生的微流体的取样部,所述检测单元包括与所述取样部通信连接或光学间接的信号获取部;所述取样部包括流体囊和动力源;所述动力源为机械式动力输出机构;所述动力源与所述处理中心通信连接;
取样步骤包括:所述动力源获取所述处理中心的取样指令,以产生一机械驱动力由所述输入肢输入,以对所述流体囊产生形变,并使得所述输出肢产生吸附或摆动的动作,与使用者皮肤接触,从而获取是使用者皮肤表面含有的分泌物的样品。
进一步的,在所述输出肢产生吸附或摆动的动作时,所述流体囊还通过所述输出肢释放取样液。
有益效果:
本发明提供一种生物智能穿戴设备,便于使用者穿戴,并且在穿戴后处理中心可以根据使用者体温和分泌物水平,从而向使用者发出提醒信息,或者对使用者进行相关处理。并且,对其取样过程进行了精细化控制,及更适合与人体工学的取样模式,取样结构精妙,取样方法简便易行,便于实际推广。
附图说明
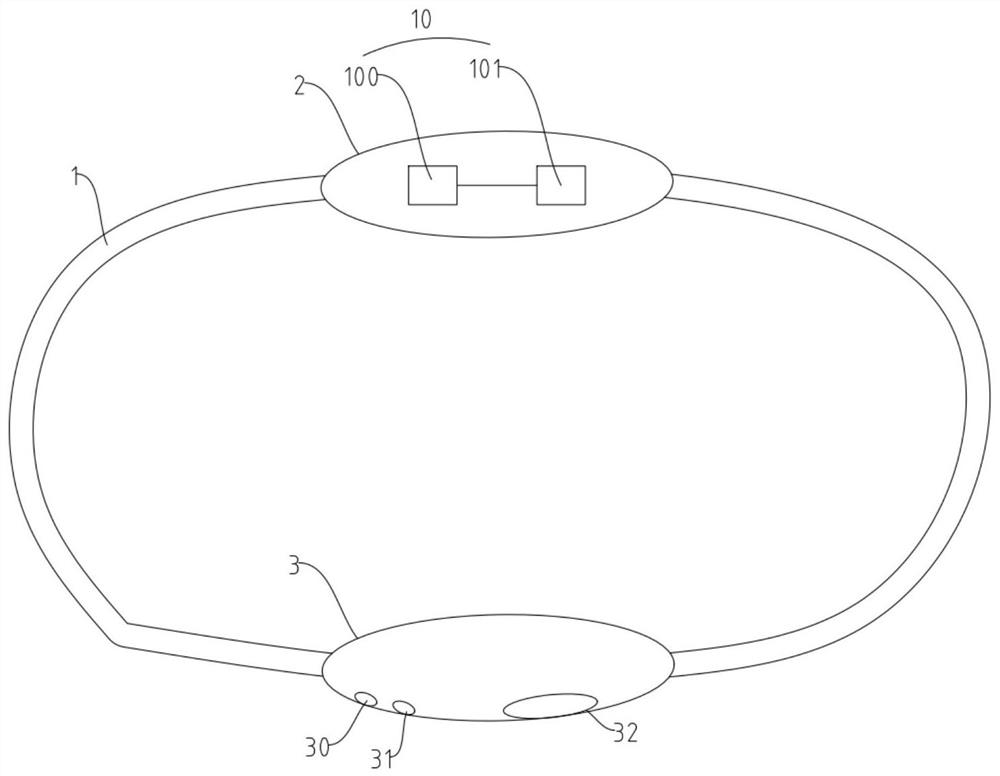
图1为本发明实施例提供的生物智能穿戴设备的整体结构示意图。
图2为本发明实施例提供的取样部的整体结构示意图。
图3为本发明实施例提供的输出肢的平面结构示意图。
图4为本发明实施例提供的微流阀的平面结构示意图。
图5为本发明另一实施例提供的微流阀的平面结构示意图。
图6为本发明实施例提供的阀体的立体结构示意图。
图7为本发明另一实施例提供的阀体的立体结构示意图。
图8为本发明另一实施例提供的阀体的立体结构示意图。
图9为本发明另一实施例提供的阀体的立体结构示意图。
图10为本发明另一实施例提供的阀体和阀壳的立体连接挂关系结构示意图。
图11为本发明另一实施例提供的取样部的整体结构示意图。
图12为本发明实施例提供的生物智能穿戴设备的控制逻辑结构示意图。
图13为本发明一实施例提供的生物智能穿戴设备的取样方法流程示意图。
图14为本发明另一实施例提供的生物智能穿戴设备的取样方法流程示意图。
图15为本发明另一实施例提供的生物智能穿戴设备的取样方法流程示意图。
图16为本发明另一实施例提供的生物智能穿戴设备的取样方法流程示意图。
1穿戴基础、10连接机构、100安全提示模块、101供电模块、
2处理中心、3生物特征获取单元、30温度传感器、31心率血氧传感器、
32采集模块、320取样部、3200流体囊、32000输入肢、32001输出肢、32001a微流通道、32001b分子探针层、3201动力源、
3202微流阀、32020阀壳、32020a液流路径、32020b气流路径、32020c转动腔、32020d止位槽、
32021阀体、32021a连通通路、32021b转动鳍、32021c止位部、
3203取样囊、
3204气管、
3205传动组件、32050挤压部、
3206限位通道、
33检测模块、330信号获取部。
具体实施方式
为了使本发明的目的、技术方案及优点更加清楚明白,以下结合附图及实施例,对本发明进行进一步详细说明。应当理解,此处所描述的具体实施例仅仅用以解释本发明,并不用于限定本发明。
本发明提供一种生物智能穿戴设备,如图1所示,包括穿戴基础1、设置于穿戴基础1上的处理中心2及生物特征获取单元3;穿戴基础1包括连接机构10,连接机构10用于将生物智能穿戴设备固定于使用者身上,连接机构10具有安全提示模块100和对生物智能穿戴设备供电的供电模块101;生物特征获取单元3用于获取使用者的生物特征,生物特征包括体温和皮肤分泌物。
本发明提供一种生物智能穿戴设备,便于使用者穿戴,并且在穿戴后处理中心可以根据使用者体温和分泌物水平,从而向使用者发出提醒信息,或者对使用者进行相关处理。
具体的,如图1,生物特征获取单元3包括温度传感器30,温度传感器30通过获取人体皮肤表面的红外线而获取人体体温。具体的,温度传感器30可以是如热红外人体感应器,如MEMS非接触式温度传感器(欧姆龙公司产品)、RE200B-P热释电红外人体感应传感器或PIR TD-FP67三脚直插数字热释电红外传感器。
具体的,如图1,生物特征获取单元3还包括心率血氧传感器31,生物特征还包括使用者的心率值。具体的,心率血氧传感器31可采用如MAX30100心率脉搏心跳传感器(CoreSet公司)。
具体的,温度传感器30和心率血氧传感器31均与处理中心3电性连接。处理中心2收到这些生物特征信息后,将这些信息进行格式转换后与预先储存的生物特征信息进行比较,若处在预先设定的正常范围内,则对使用者发出提醒信息或对使用者进行相关处理。
具体的,处理中心2与供电模块101和安全提示模块100电性连接。安全提示模块100用于根据处理中心2的输出指令而发出报警信息,以便使用者知晓。其中,报警信息包括可视化信息、机械振动信息和声音信息,如通过人机界面显示相关生物特征是否在正常水平,发出语音提示报警,或安全提示模块100通过自身机械振动提示使用者。
更优选的,如图2,本发明提供的生物特征获取单元3还包括采集模块32和检测模块33;采集模块32具有可产生的微流体的取样部320,检测模块33包括与取样部320通信连接或光学间接的信号获取部330。
由于使用者分泌物主要是一些大分子(如酶、核酸、蛋白或脂肪类物质等),现有主要通过分子探针与分泌物中的待测的标记物进行反应,产生一定电学信号或者光学信号,通过对这些电学信号或光学信号进行收集、转移和处理能够获取分泌物中待测物的含量。
进一步的实施例中,为便于获取分泌物中的待测物,如图2,取样部320包括流体囊3200、动力源3201和取样囊3203,流体囊3200用于盛放取样液;流体囊3200具有输入肢32000和输出肢32001,输入肢32000与动力源3201传动连接以将流体囊3200的取样液输出至输出肢32001。取样囊3203通过输入肢32000与流体囊3200连通,以向流体囊3200提供取样液。输出肢32001上设置有分子探针,分子探针(如图3中的分子探针层)用于与皮肤分泌物进行结合并产生光学信号或电信号。具体的,分子探针通过键合固定于输出肢32001的末端,便于直接与皮肤表面接触并分泌物中待测标记物反应和检测。而输出肢32001的内部开设微流通道32001a,便于对皮肤分泌物中待测标记物进行溶解和为反应提供一个液相环境。
其中,动力源3201为流体压力产生机构,用于从输入肢32000向流体囊3200内输入正压或负压动力,以在输出肢32001产生正压或负压。具体的,动力源3201能够是气缸或气体泵作为输入动力,或为机械式动力输出机构3201。
为便于对从输入肢32000输入的动力进行控制,进一步的实施方式中,如图4、图5所示,取样部320还包括设置于输入肢32000和输出肢32001上的微流阀3202,微流阀3202包括阀壳32020和阀体32021,阀壳32020内部形成相互交叉的液流路径32020a和气流路径32020b,阀体32021转动连接于液流路径32020a和气流路径32020b交叉部位。
具体的,阀体32021内开设连通通路32021a,通过从气流路径32020b输入有压气体或负压气体,控制阀体32021转动,从而使得阀体32021内的连通通路32021a转动至使其两端的液流路径32020a连通或阻断,从而实现的微流阀3202的开关。具体的,气流路径32020b与动力源3201的输出端连通,通过动力源3201输出有压气体或负压气体,从而实现微流阀3202的开关,从而实现有压气体或负压气体从输入肢32000输入至流体囊3200的开关,并控制流体囊3200内的取样液从输出肢32001释放。
具体的,如图5所示,优选的,液流路径32020a和气流路径32020b相互垂直,在二者相互交叉的部位形成一用于阀体32021转动的转动腔32020c。阀体32021与转动腔32020c紧密配合并转动连接于转动腔32020c内。如图6、7、8、9所示,阀体32021整体呈圆柱体、球体或两端大中心小的形状。优选的阀体32021整体呈两端大中心小的形状,连通通路32021a贯通阀体32021,阀体32021的两个大端与转动腔32020c的腔壁紧密配合,阀体32021的中心小端具有表面暴露于气流路径32020b内并向小端周向延伸的转动鳍32021b,转动鳍32021b用于被气流路径32020b的气流驱动而转动,从而带动整个阀体32021转动,致使连通通路32021a能够转动至阀体32021两端的液流路径32020a能够连通或阻断。更具体的,连通路径32001a的截面与液流路径32020a的截面大小相同,优选均为圆形,从而减少取样液在液流路径32020a和连通通路32021a内的滞留。
为便于对阀体32021的转动进行控制,更具体的实施例中,如图10所示,转动腔32020c与阀体32021的紧密配合的部位形成有止位槽32020d,对应的,阀体32021与转动腔32020c紧密配合部位凸出形成止位部32021c。当气流路径32020b内的气流驱动转动鳍32021b转动时,带动止位部32021c转动至抵靠与止位槽32020d内时,无法再进行转动,而此时对应的连通通路32021a与液流路径32020a连通或阻断,当气流路径32020b内的气流反向驱动转动鳍32021b转动时,带动止位部32021c由另一方向转动至另一止位槽32020d内,从而实现与上述方向的液流路径32020a阻断或连通。如此,通过止位槽32020d和止位部32021c的配合,能够控制阀体32021的转动,从而实现连通通路32021a与液流路径32020a连通或阻断。
可选的,动力源3201为微型隔膜泵(如Hilanpt生产的HL370V1),高真空度,电动驱动方式,DC24.0V,空载电流≥100mA,工作电压20~25V,气体流量为L/min,气体压力≥120Kpa,真空压力≥-60Kpa,工作寿命≥50000h,噪音<52dB,非常适合于应用吸奶器、吸痰机、吸脂机、吸鼻器、食品保鲜设备、真空包装机、汽车按摩坐垫、3D食品打印等电子医疗设备,也即能应用于本发明中,通过其电动驱动方式,能够直接对取输入模拟电压信号,对其开关和转速进行控制,也即可以直接与处理中心2进行电性连接。
可选的,动力源3201为机械式动力输出机构,如微型无刷直流电机,额定电压4.5V,额定电流50mA,支持脉冲输字信号输入,可配备编码器,能够直接与处理中心2电性连接,通过处理中心2直接控制。
更具体的,流体囊3200为柔性材质制成,在使用者穿戴过程中,通过动力源3201的驱动而对流体囊3200产生挤压或不产生挤压,从而实现其中的取样液从输出肢32001释放,并控制微流阀的开关。
一些实施例中,动力源3201为微型隔膜泵,微型隔膜泵的输出端与微流阀3202的气流路径32020b连通,从而控制阀体32021转动以控制微流阀3202的开关。
一些实施例中,动力源3201微型无刷直流电机,其输出端能够驱动流体囊发生形成,从而在输出肢32001释放取样液。
优选的,动力源3201包括微型隔膜泵和微型无刷直流电机,微型隔膜泵控制微流阀的开关,微型无刷直流电机控制流体囊内取样液的释放。
在一些实施例中,如图11所示,取样部320还包括用于连通微型隔膜泵与微流阀气流路径的气管3204,及用于传动连接微型无刷直流电机与流体囊3200的传动组件3205。
具体的,传动组件3205的一端连接于微型无刷直流电机的输出端、另一端形成一挤压部32050,挤压部32050为截面不断扩大的形状,末端成平面形状,与流体囊表面相适应,当微型无刷直流电机的输出端转动时,传动组件3205能够将这种转动作用转化为其挤压部的伸缩运动,从而实现与流体囊的接触与不接触,从而实现对流体囊的挤压。具体的,传动组件3205可有两个获得连接的部件构成,其中一个的一端与微型无刷直流电机的输出端连接、另一端与另一个部件的一端铰接,另一个部件的另一端形成挤压部32050。并且,取样部320形成用用于传动组件3205运动方向进行限定的限位通道3206,使得形成有挤压部32050的部件只能在限位通道3206能做往复运动。
更具体的,流体囊3200具有一定弹性,在其被挤压后能够自动回复成未受挤压的一半形态,从而在其输入肢产生负压,将取样囊3203内的取样液源源不断地吸入。
为便于输出肢32001的取样,在一些实施例中,需要输出肢32001能够产生吸附或摆动的动作,从而与使用者的皮肤更好的接触,便于更好的取样。因而,这些实施例中,输出肢32001成吸盘结构,流体囊3200与吸盘结构连通以对吸盘结构通入正压或负压,以吸附于皮肤表面,并对皮肤表面喷洒取样液。或者,在另一些实施例中,输出肢32001具有多个,成柔性,每一输出肢32001内形成有微流通道32001a,每一微流通道32001a均形成与流体囊3200连通,流体囊3200内的正压或者负压由微流通道32001a喷出,带动输出肢32001摆动至抚过皮肤表面。或者,在另一些实施例中,传动组件3205具有连接于输出肢32001上的一端,在微型无刷直流电机转动动时,传动电机能够将这种转动转化为对输出肢的推拉运动,从而实现输出肢的摆动至不断扫过皮肤表面,使得能够更充分的取样。
本发明提供一种生物智能穿戴设备的控制方法,如图12所示,包括以下步骤:
当生物智能穿戴设备获得供电并穿戴与使用者身上时,控制生物特征获取单元3获取使用者的生物特征,并将生物特征输入至处理中心2,处理中心2经过处理和判断后输出控制指令至安全提示模块100,以发出报警信息;其中所述报警信息包括可视化信息、机械振动信息和声音信息。
其中,报警信息包括可视化信息、机械振动信息和声音信息,如通过人机界面显示相关生物特征是否在正常水平,发出语音提示报警,或安全提示模块100通过自身机械振动提示使用者。
根据上述对本发明提供的生物智能穿戴设备的描述,可见其控制逻辑结构如图所示。
具体的,本发明提供的生物智能穿戴设备的控制方法包括取样步骤、检测分析步骤、输出通信方法和安全提示方法。通过取样步骤获取使用者的体外、心率和血氧饱和度、以及分泌物浓度,从而便于进行分析,以便给出合适的安全提示信息。
其中,取样步骤包括:动力源获取处理中心的取样指令,以产生一驱动力使得流体囊产生形变,并使得输出肢产生吸附或摆动的动作,与使用者皮肤接触,从而获取使用者皮肤表面含有的分泌物的样品。
具体的,动力源为流体压力产生机构,用于对流体囊产生正压或负压,优选的,流体囊为柔性材料制成。为便于更好地监控流体囊压力,在流体囊壁附着有一压力监控探头,压力监测探头与采集模块32通信连接,如通过蓝牙通信连接,而采集模块再将压力检测探头获得的流体囊压力信号经过处理后发送至处理中心,处理中心据此发出流体囊控制指令。
为进一步精确控制流体囊的输入肢和输出肢上的微流阀的开关,微流阀的气流路径上也设有微型压力监测探头,该探头与采集模块32通信连接,采集模块32将气流路径上获取的气流压力信号经过处理后发送至处理中心,处理中心据此发出微流阀控制指令。
由此,在一些实施例中,如图13所示,取样方法包括以下步骤:
S1、处理中心获取需要取样指令,经过处理后发送出取样指令至采集模块;
S2、采集模块将根据需要取样指令,获取流体囊压力信号后并将其反馈至处理中心;
S3、处理中心获取反馈后,经过判断后发出取样指令至动力源;
S4、动力源接受取样指令,输出驱动力至流体囊,实现输出肢吸附、或摆动的动作,实现取样。
在另一些实施例中,如图14所示,取样方法包括以下步骤:
S1、处理中心获取需要取样指令,经过处理后发送出取样指令至采集模块;
S2、采集模块将根据需要取样指令,获取流体囊压力信号、其输入肢压力信号和输出肢压力信号后并将其反馈至处理中心;
S3、处理中心获取反馈后,经过判断后发出流体囊控制指令和微流阀控制指令至动力源;
S4、动力源接受流体囊控制指令和微流阀控制指令,分别输出驱动力控制流体囊形变和微流阀的开关,从而实现微流阀的开关和输出肢取样液的释放,实现取样。
在一些实施例中,如图15所示,取样方法包括以下步骤:
S1、处理中心获取需要取样指令,经过处理后发送出取样指令至采集模块;
S2、采集模块将根据需要取样指令,获取流体囊压力信号、其输入肢压力信号和输出肢压力信号后并将其反馈至处理中心;
S3、处理中心获取反馈后,经过判断后发出流体囊控制指令至微型治疗无刷电机,发出微流阀控制指令至微型隔膜泵;
S4、微型隔膜泵接受所述微型阀控制指令输出正压气流或负压气流,使得阀体转动至液流路径连通或阻断,从而实现微流阀的开断;
S5、微型无刷直流电机接受流体囊控制指令,其输出轴转动,从而带动传动组件动作,从而使得挤压部做往复动作,从而实现流体量发生形变,使得输出肢产生的取样液释放。
在一些实施例中,如图16所示,取样方法包括以下步骤:
S1、处理中心获取需要取样指令,经过处理后发送出取样指令至采集模块;
S2、采集模块将根据需要取样指令,获取流体囊压力信号、其输入肢压力信号和输出肢压力信号后并将其反馈至处理中心;
S3、处理中心获取反馈后,经过判断后发出流体囊控制指令至微型治疗无刷电机,发出微流阀控制指令至微型隔膜泵;
S4、微型隔膜泵接受所述微型阀控制指令输出正压气流,使得阀体转动至液流路径连通,微流阀的打开,输入肢和输出肢连通;
S5、微型无刷直流电机接受流体囊控制指令,其输出轴转动,从而带动传动组件动作,从而使得挤压部做往复动作,从而实现流体量发生形变,使得输出肢产生的取样液释放;同时带动输出肢发射摆动,取样更彻底;
S6、处理中心通过内设的取样程序进行取样计时,计时完成,发出停止取样指令至微型无刷直流电机和微型隔膜泵;
S7、微型无刷直流电机关闭,微型隔膜泵产生一股负压气流,致使微流阀关闭,输入肢和输出肢阻断,微型隔膜泵同时产生一反馈信号至处理中心,处理中心接受后使得其内设的取样程序完成。
和微流阀控制指令,分别输出驱动力控制流体囊形变和微流阀的开关,从而实现微流阀的开关和输出肢取样液的释放,实现取样。
具体的,检测分析步骤包括:输出肢采集了使用者分泌物后,通过其上固定的分子探针与分泌物中的待测标记物进行反应,产生一定电信号或光信号,这些电信号或光信号被信号获取部获取,并经过处理后转换发送至处理中心;而输出通信方法和安全提示方法则具体包括:处理中心根据获取反应物的信号,并结合温度传感器和心率血氧传感器获取的人体体温和心率血氧信号,进行处理和判断后输出控制指令至安全提示模块,以发出报警信息,报警信息包括可视化信息、机械振动信息和声音信息。
综上,本发明提供一种生物智能穿戴设备,便于使用者穿戴,并且在穿戴后处理中心可以根据使用者体温和分泌物水平,从而向使用者发出提醒信息,或者对使用者进行相关处理。并且,对其取样过程进行了精细化控制,及更适合与人体工学的取样模式,取样结构精妙,取样方法简便易行,便于实际推广。
以上所述,仅为本发明较佳的具体实施方式,但本发明的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本发明揭露的技术范围内,可轻易想到的变化或替换,都应涵盖在本发明的保护范围之内。
- 一种生物智能穿戴设备及其控制方法
- 一种智能穿戴设备及智能穿戴设备的控制方法