四发双旋臂垂直起降无人机及其飞行控制方法
文献发布时间:2023-06-19 09:41:38
技术领域
本发明属于无人机结构设计及无人机控制技术领域,尤其涉及一种四发双旋臂垂直起降无人机及其飞行控制方法。
背景技术
现在无人机在航空测绘、电力巡检、快递投送、防灾减灾、军事侦察等领域的应用越来越广泛,其中应用较广泛的机型包括:固定翼无人机、多轴旋翼无人机和固定翼-四旋翼复合无人机,但是这几类无人机在大大提高所应用行业作业效率的同时,却始终面临着一些难以解决的矛盾性问题:
固定翼无人机技术成熟、气动效率高、续航时间长、巡航速度快、单架次作业面积大,但固定翼无人机的传统起降方式对起飞或回收场地提出了较高的要求;
多轴旋翼无人机能够垂直起降,对起飞、回收场地要求低,但由于固有的空气动力效率问题,其续航时间短、巡航速度低的缺点难以克服,客观上制约了作业效率的提升;
固定翼-四旋翼复合无人机兼具多轴旋翼无人机能够垂直起降和固定翼无人机气动效率高的特点,近年来应用范围逐渐扩大。但其也有明显的不足:一是平飞时四旋翼组件不工作,成为死重,降低了无人机的负载能力,增大了全机的阻力,巡航速度和续航时间都有较大幅度的缩减;二是悬停时固定翼组件不工作,使得无人机的控制完全依靠旋翼,而主翼、尾翼等气动结构在外界干扰下易产生较大的气动力矩,易出现旋翼控制裕量不足的问题。
发明内容
有鉴于此,本发明实施例提供了一种四发双旋臂垂直起降无人机及其飞行控制方法,其显著优势在于可以垂直起降、结构简单、巡航效率高、升阻比大。
为实现上述目的,本发明实施例的第一方面提供了一种四发双旋臂垂直起降无人机,当所述四发双旋臂垂直起降无人机为垂直起降模式时,其为以机身为对称轴的对称结构,包括:
机身垂直于地面;
主翼梁,与所述机身的中部连接;主机翼,与所述主翼梁连接,并通过所述主翼梁连接到所述机身的中部,形成中单翼结构;
左旋臂驱动机构与右旋臂驱动机构分别设置在所述主机翼的左右两侧内部,与所述主翼梁固定连接;左旋臂设置在所述主机翼的左前中部,与所述左旋臂驱动机构固定连接,且与所述主机翼形成十字形交叉结构,右旋臂设置在所述主机翼的右前中部,与所述右旋臂驱动机构固定连接,且与所述主机翼形成十字形交叉结构;一号动力总成和二号动力总成分别固定连接在所述左旋臂的左右两端部,三号动力总成和四号动力总成分别固定连接在所述右旋臂的左右两端部;左内襟副翼和左外襟副翼分别连接在所述主机翼的左后缘的内外两侧,右内襟副翼和右外襟副翼分别连接在所述主机翼的右后缘的内外两侧;
固定尾翼,在所述机身的尾部固定连接;
左垂直尾翼和右垂直尾翼分别固定连接在所述固定尾翼的左右两端,形成“H”形尾翼结构,支撑立于地面上;左升降舵和右升降舵分别连接在所述固定尾翼的左后缘中部和右后缘中部。
作为本申请另一实施例,所述左旋臂驱动机构与所述右旋臂驱动机构通过螺栓分别固定连接所述主翼梁;
所述左旋臂通过螺栓与所述左旋臂驱动机构固定连接,在所述左旋臂驱动机构带动下转动90°;所述右旋臂通过螺栓与所述右旋臂驱动机构固定连接,在所述右旋臂驱动机构带动下转动90°;
所述一号动力总成和所述二号动力总成分别通过螺栓固定连接在所述左旋臂的左右两端部,所述三号动力总成和所述四号动力总成分别通过螺栓固定连接在所述右旋臂的左右两端部;
所述左内襟副翼和所述左外襟副翼分别通过铰链连接在所述主机翼的左后缘的内外两侧,所述右内襟副翼和所述右外襟副翼分别通过铰链连接在所述主机翼的右后缘的内外两侧;
所述左垂直尾翼和所述右垂直尾翼分别通过螺钉固定连接在所述固定尾翼的左右两端;
所述左升降舵和所述右升降舵分别通过铰链连接在所述固定尾翼的左后缘中部和右后缘中部。
作为本申请另一实施例,所述一号动力总成和所述三号动力总成分别位于所述主机翼的上方,所述二号动力总成和所述四号动力总成分别位于所述主机翼的下方。
作为本申请另一实施例,当所述四发双旋臂垂直起降无人机处于巡航飞行模式下时,
所述机身由垂直方向转换为水平方向;所述左旋臂以及设置在所述左旋臂上的所述一号动力总成和所述二号动力总成在所述左旋臂驱动机构带动下转动90°,与所述主机翼平行,所述右旋臂以及设置在所述右旋臂上的所述三号动力总成和所述四号动力总成在所述右旋臂驱动机构带动下转动90°,与所述主机翼平行。
作为本申请另一实施例,所述一号动力总成、所述三号动力总成、所述二号动力总成和所述四号动力总成分别包括无刷电机、外壳、旋翼夹、旋翼和电子调速器;
所述无刷电机设置在所述外壳顶端,所述旋翼夹通过螺钉固定在所述无刷电机顶端,所述旋翼通过所述旋翼夹与所述无刷电机固定连接;
所述电子调速器设置在所述外壳内部,为所述无刷电机提供驱动电流并控制其转速;
所述外壳的底端分别固定在所述左旋臂的左右两端部和所述右旋臂的左右两端部。
本发明实施例的第二方面提供了一种四发双旋臂垂直起降无人机的飞行控制方法,包括:基于上述任一实施例中所述的四发双旋臂垂直起降无人机,所述四发双旋臂垂直起降无人机的飞行控制方法通过对所述四发双旋臂垂直起降无人机上设置的控制芯片发送不同的飞行动作指令,控制所述四发双旋臂垂直起降无人机在垂直起降模式以及巡航飞行模式执行飞行动作;
当所述四发双旋臂垂直起降无人机处于垂直起降模式时,以机头到机尾的方向为基准方向,一号动力总成和三号动力总成逆时针旋转,二号动力总成和四号动力总成顺时针旋转,且所述一号动力总成、所述三号动力总成、所述二号动力总成和所述四号动力总成上分别设置的旋翼的旋转角速度和角加速度均相同,所有旋翼的旋转速度逐步加大或减小,使所述四发双旋臂垂直起降无人机纵向提升或者降落;
在所述四发双旋臂垂直起降无人机纵向提升或者降落过程中,所述四发双旋臂垂直起降无人机采用俯仰控制力矩、滚转控制力矩以及偏航控制力矩控制所述四发双旋臂垂直起降无人机飞行;所述俯仰控制力矩由所述一号动力总成和所述四号动力总成上设置的旋翼同时增大或者减小转速、所述二号动力总成和所述三号动力总成上设置的旋翼同时减小或者增大转速得到;所述滚转控制力矩由由所述一号动力总成和所述二号动力总成上设置的旋翼同时增大或者减小转速、所述三号动力总成和所述四号动力总成上设置的旋翼同时减小或者增大转速得到;所述偏航控制力拒由所述一号动力总成和所述三号动力总成上设置的旋翼同时增大或者减小转速、所述二号动力总成和所述四号动力总成上设置的旋翼同时减小或者增大转速得到;
当所述四发双旋臂垂直起降无人机处于巡航飞行模式,飞行速度为第一速度时,飞行动力由所有动力总成同时工作提供,且所述四发双旋臂垂直起降无人机的左外襟副翼和右外襟副翼差动提供滚转控制力矩,所述四发双旋臂垂直起降无人机的左升降舵和右升降舵联动提供俯仰控制力矩,所述一号动力总成和所述二号动力总成联动、所述三号动力总成和所述四号动力总成联动产生的转速差动提供偏航控制力矩;
当所述四发双旋臂垂直起降无人机处于巡航飞行模式,飞行速度为第二速度时,飞行动力由所述二号动力总成和所述三号动力总成提供,所述四发双旋臂垂直起降无人机的左内襟副翼和右内襟副翼处于中立位置不动或作为襟翼以第一角度放下,所述四发双旋臂垂直起降无人机的左外襟副翼和右外襟副翼差动提供滚转控制力矩,所述四发双旋臂垂直起降无人机的左升降舵和右升降舵联动提供俯仰控制力矩,所述二号动力总成与所述三号动力总成转速差动提供偏航控制力矩;
当所述四发双旋臂垂直起降无人机处于巡航飞行模式,飞行速度为第三速度时,飞行动力由所有动力总成同时工作提供,所述四发双旋臂垂直起降无人机的左内襟副翼和右内襟副翼作为襟翼以第二角度放下,所述四发双旋臂垂直起降无人机的左外襟副翼和右外襟副翼差动提供滚转控制力矩,所述四发双旋臂垂直起降无人机的左升降舵和右升降舵联动提供俯仰控制力矩,所述一号动力总成和所述二号动力总成联动、所述三号动力总成和所述四号动力总成联动产生的转速差动提供偏航控制力矩;
所述第二速度大于所述第三速度且小于所述第一速度,所述第一角度小于所述第二角度。
作为本申请另一实施例,还包括:当所述四发双旋臂垂直起降无人机处于垂直起降向巡航飞行的过渡模式时,采用滚转控制力矩、俯仰控制力矩以及偏航控制力矩控制所述四发双旋臂垂直起降无人机飞行;
所述滚转控制力矩包括垂直起降状态的滚转方向直接控制力矩和水平飞行状态的气动滚转控制力矩,所述垂直起降状态的滚转方向直接控制力矩由所述一号动力总成和所述二号动力总成上设置的旋翼同时增大或者减小转速、所述三号动力总成和所述四号动力总成上设置的旋翼同时减小或者增大转速得到,所述水平飞行状态的气动滚转控制力矩由所述四发双旋臂垂直起降无人机的左外襟副翼和左内襟副翼联动、右外襟副翼和右内襟副翼联动产生的差动得到;
所述俯仰控制力矩包括俯仰方向直接控制力矩和气动俯仰控制力矩,所述俯仰方向直接控制力矩由所述一号动力总成和所述四号动力总成上设置的旋翼同时增大或者减小转速、所述二号动力总成和所述三号动力总成上设置的旋翼同时减小或者增大转速得到,所述气动俯仰控制力矩由所述四发双旋臂垂直起降无人机的左升降舵和右升降舵联动形成的气动力矩得到;
所述偏航控制力拒包括垂直起降状态的偏航控制力矩和水平飞行状态的偏航控制力矩,所述垂直起降状态的偏航控制力矩由所述一号动力总成和所述三号动力总成联动、所述二号动力总成和所述四号动力总成联动形成的转速差动产生的反扭矩得到;所述水平飞行状态的偏航控制力矩由所述一号动力总成和所述二号动力总成联动、所述三号动力总成和所述四号动力总成联动形成的转速差动得到。
作为本申请另一实施例,还包括:当飞行速度达到预设速度时,所述四发双旋臂垂直起降无人机的左旋臂在左旋臂驱动机构的驱动下,带着所述一号动力总成和所述二号动力总成逆时针转动90°,与所述四发双旋臂垂直起降无人机的主机翼的左前缘吻合;同时,所述四发双旋臂垂直起降无人机的右旋臂在右旋臂驱动机构的驱动下,带着所述三号动力总成和四号动力总成顺时针转动90°,与所述主机翼的右前缘吻合,完成垂直起降模式向巡航飞行模式的过渡。
作为本申请另一实施例,还包括:当所述四发双旋臂垂直起降无人机处于巡航飞行向垂直起降的过渡模式时,所有动力总成采用第四转速提供动力,所述四发双旋臂垂直起降无人机的左内襟副翼和右内襟副翼采用第三角度向下偏转,所述四发双旋臂垂直起降无人机的左外襟副翼和右外襟副翼采用第四角度向上偏转,形成气动刹车,降低飞行速度;同时,所述滚转控制力矩由所述四发双旋臂垂直起降无人机的左外襟副翼和右外襟副翼差动,以及左水平尾翼和右水平尾翼差动联合提供,所述俯仰控制力矩和所述偏航控制力矩保持不变;
所述四发双旋臂垂直起降无人机的左旋臂在左旋臂驱动机构的驱动下,带着所述一号动力总成和所述二号动力总成顺时针转动90°,与所述主机翼形成十字形交叉;所述四发双旋臂垂直起降无人机的右旋臂在右旋臂驱动机构的驱动下,带着所述三号动力总成和所述四号动力总成逆时针转动90°,与所述主机翼形成十字形交叉,使动力系统获得飞行姿态控制权;同时,所述一号动力总成和所述四号动力总成同时增大转速,所述二号动力总成、所述三号动力总成同时减小转速,左升降舵和右升降舵同时向上偏转,控制无人机由水平状态转化为垂直状态,完成巡航飞行模式向垂直起降模式的过渡。
作为本申请另一实施例,在所述四发双旋臂垂直起降无人机纵向提升或者降落过程中,还包括:
当风力达到预设风力阈值时,由所述四发双旋臂垂直起降无人机的左升降舵和右升降舵同时偏转产生第一气动控制力矩,与所述俯仰控制力矩共同控制所述四发双旋臂垂直起降无人机飞行;
当风力达到预设风力阈值时,由所述四发双旋臂垂直起降无人机的左外襟副翼和左内襟副翼联动、右外襟副翼和右内襟副翼联动形成的差动产生第二气动控制力矩,与所述偏航控制力矩共同控制所述四发双旋臂垂直起降无人机飞行。
本发明实施例与现有技术相比存在的有益效果是:与现有技术相比,本发明提供的无人机可以垂直起降,从而降低了对起飞或回收场地的要求,结构简单且易于控制。本发明中的无人机的左旋臂和右旋臂以及其上设置的四个动力总成上的四个旋翼构成四发双旋臂的结构设计,避免了固定翼-四旋翼复合无人机巡航模式下的四旋翼机臂、电机、螺旋桨等成为死重以及固定式四旋翼机臂空气阻力大的缺点,提高了整机的升阻比,使得本发明气动效率高、巡航时间长、巡航速度快。
附图说明
为了更清楚地说明本发明实施例中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动性的前提下,还可以根据这些附图获得其他的附图。
图1是本发明实施例提供的四发双旋臂垂直起降无人机的结构示意图;
图2是本发明另一实施例提供的四发双旋臂垂直起降无人机的结构示意图;
图3是本发明实施例提供的四发双旋臂垂直起降无人机处于各种飞行模式的示意图。
具体实施方式
以下描述中,为了说明而不是为了限定,提出了诸如特定系统结构、技术之类的具体细节,以便透彻理解本发明实施例。然而,本领域的技术人员应当清楚,在没有这些具体细节的其它实施例中也可以实现本发明。在其它情况中,省略对众所周知的系统、装置、电路以及方法的详细说明,以免不必要的细节妨碍本发明的描述。
为了说明本发明所述的技术方案,下面通过具体实施例来进行说明。
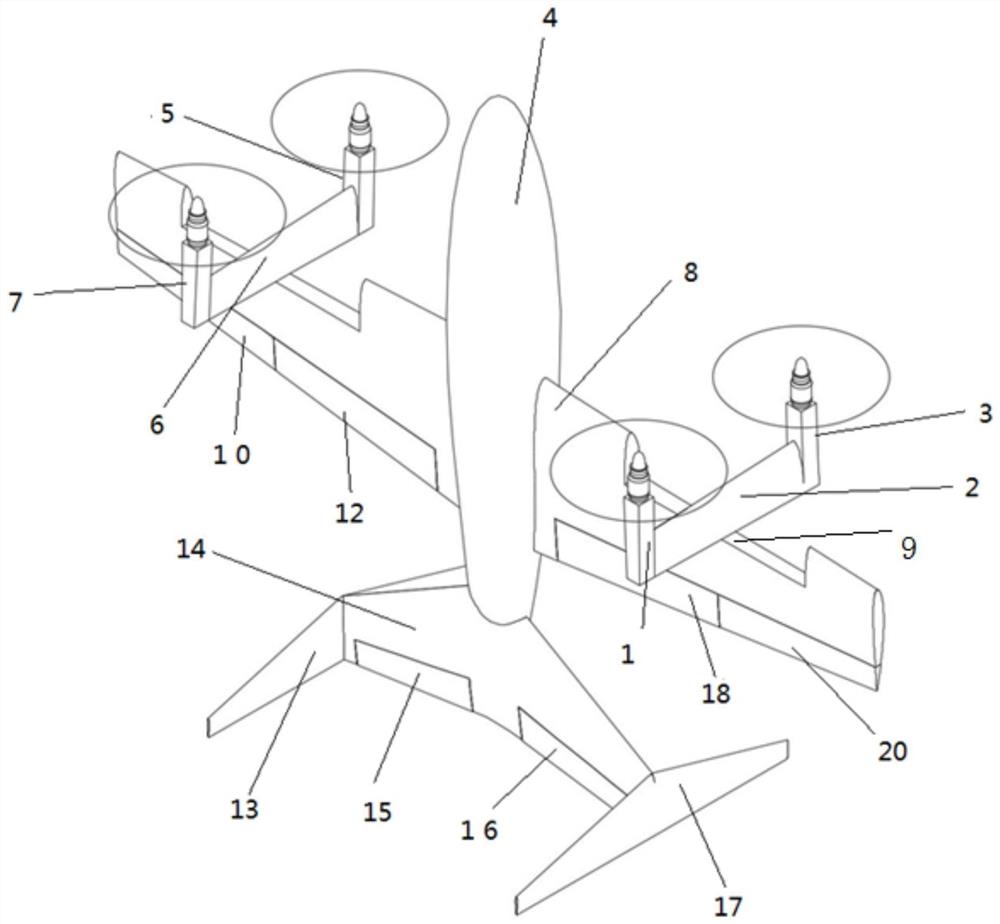
图1、图2为本发明实施例提供的一种四发双旋臂垂直起降无人机的示意图,详述如下。图1为四发双旋臂垂直起降无人机为垂直起降模式时,其以机身为对称轴的对称结构,四发双旋臂垂直起降无人机包括:一号动力总成1、左旋臂2、二号动力总成3、机身4、三号动力总成5、右旋臂6、四号动力总成7、主机翼8、主翼梁9、右外襟副翼10、右旋臂驱动机构11、右内襟副翼12、右垂直尾翼13、水平尾翼14、右升降舵15、左升降舵16、左垂直尾翼17、左内襟副翼18、左旋臂驱动机构19、左外襟副翼20;
机身4在中部,垂直于地面;
主翼梁9,与所述机身4的中部连接;主机翼8,与所述主翼梁9连接,并通过所述主翼梁9连接到所述机身4的中部,形成中单翼结构;
左旋臂驱动机构19与右旋臂驱动机构11分别设置在所述主机翼8的左右两侧内部,与所述主翼梁9固定连接;左旋臂2设置在所述主机翼8的左前中部,与所述左旋臂驱动机构19固定连接,且与所述主机翼8形成十字形交叉结构,右旋臂6设置在所述主机翼8的右前中部,与所述右旋臂驱动机构11固定连接,且与所述主机翼8形成十字形交叉结构;一号动力总成1和二号动力总成3分别固定连接在所述左旋臂6的左右两端部,三号动力总成5和四号动力总成7分别固定连接在所述右旋臂6的左右两端部;左内襟副翼18和左外襟副翼20分别连接在所述主机翼8的左后缘的内外两侧,右内襟副翼12和右外襟副翼10分别连接在所述主机翼8的右后缘的内外两侧;
固定尾翼14,在所述机身4的尾部固定连接;
左垂直尾翼17和右垂直尾翼13分别固定连接在所述固定尾翼14的左右两端,形成“H”形尾翼结构,支撑立于地面上;左升降舵16和右升降舵14分别连接在所述固定尾翼14的左后缘中部和右后缘中部。
上述无人机为垂直起降模式,可以垂直起降,从而降低了对起飞或回收场地的要求,结构简单且易于控制。本实施例中的无人机的左旋臂和右旋臂以及其上设置的四个动力总成上的四个旋翼构成四发双旋臂的结构设计,避免了固定翼-四旋翼复合无人机巡航模式下的四旋翼机臂、电机、螺旋桨等成为死重以及固定式四旋翼机臂空气阻力大的缺点,提高了整机的升阻比,使得本发明气动效率高、巡航时间长、巡航速度快。
可选的,所述左旋臂驱动机构19与所述右旋臂驱动机构11通过螺栓分别固定连接所述主翼梁9;
如图2所示四发双旋臂垂直起降无人机处于巡航飞行模式时,所述左旋臂2通过螺栓与所述左旋臂驱动机构19固定连接,在所述左旋臂驱动机构带动下转动90°;所述右旋臂6通过螺栓与所述右旋臂驱动机构11固定连接,在所述右旋臂驱动机构带动下转动90°;
所述一号动力总成1和所述二号动力总成3分别通过螺栓固定连接在所述左旋臂6的左右两端部,所述三号动力总成和5所述四号动力总成7分别通过螺栓固定连接在所述右旋臂6的左右两端部;
所述左内襟副翼18和所述左外襟副翼20分别通过铰链连接在所述主机翼8的左后缘的内外两侧,所述右内襟副翼12和所述右外襟副翼10分别通过铰链连接在所述主机翼8的右后缘的内外两侧;
所述左垂直尾翼17和所述右垂直尾翼13分别通过螺钉固定连接在所述固定尾翼14的左右两端;
所述左升降舵16和所述右升降舵14分别通过铰链连接在所述固定尾翼14的左后缘中部和右后缘中部。
可选的,如图1和图2所示,所述固定尾翼14为水平尾翼,对称设置在所述机身4的尾部。
可选的,当四发双旋臂垂直起降无人机处于垂直起降模式时,所述一号动力总成1和所述三号动力总成3分别位于所述主机翼8的上方,所述二号动力总成5和所述四号动力总成分7别位于所述主机翼8的下方。
可选的,当所述四发双旋臂垂直起降无人机处于巡航飞行模式下时,其结构形态发生变化,如图2所示,所述机身4由垂直方向转换为水平方向;所述左旋臂2以及设置在所述左旋臂2上的所述一号动力总成1和所述二号动力总成3在所述左旋臂驱动机构带动下转动90°,与所述主机翼8平行,所述右旋臂6以及设置在所述右旋臂6上的所述三号动力总成5和所述四号动力总成7在所述右旋臂驱动机构带动下转动90°,与所述主机翼8平行。
可选的,如图1或图2所示,所述一号动力总成1、所述三号动力总成3、所述二号动力总成5和所述四号动力总成7分别包括无刷电机、外壳、旋翼夹、旋翼和电子调速器;
所述无刷电机设置在所述外壳顶端,所述旋翼夹通过螺钉固定在所述无刷电机顶端,所述旋翼通过所述旋翼夹与所述无刷电机固定连接;
所述电子调速器设置在所述外壳内部,为所述无刷电机提供驱动电流并控制其转速;
所述外壳的底端分别固定在所述左旋臂的左右两端部和所述右旋臂的左右两端部。
本发明实施例提供的一种四发双旋臂垂直起降无人机的飞行控制方法的示意图,基于上述图1或图2所述的四发双旋臂垂直起降无人机,所述四发双旋臂垂直起降无人机的飞行控制方法通过对所述四发双旋臂垂直起降无人机上设置的控制芯片发送不同的飞行动作指令,控制所述四发双旋臂垂直起降无人机在垂直起降模式以及巡航飞行模式执行飞行动作,如图3所示的四发双旋臂垂直起降无人机处于各种飞行模式,详述如下。
当所述四发双旋臂垂直起降无人机处于垂直起降模式时,图3中的第一状态、第五状态,动力由所有动力总成同时工作提供,以机头到机尾的方向为基准方向,一号动力总成和三号动力总成逆时针旋转,二号动力总成和四号动力总成顺时针旋转,达到互相抵消螺旋桨反扭矩的作用,且所述一号动力总成、所述三号动力总成、所述二号动力总成和所述四号动力总成上分别设置的旋翼的旋转角速度大小和角加速度均大小相同,所有旋翼的旋转速度逐步加大或减小,使所述四发双旋臂垂直起降无人机纵向提升或者降落。
在四发双旋臂垂直起降无人机上升或者降落过程中,四发双旋臂垂直起降无人机采用俯仰控制力矩、滚转控制力矩以及偏航控制力矩控制所述四发双旋臂垂直起降无人机飞行;
所述俯仰控制力矩由所述一号动力总成和所述四号动力总成上设置的旋翼同时增大或者减小转速、所述二号动力总成和所述三号动力总成上设置的旋翼同时减小或者增大转速得到;
所述滚转控制力矩由由所述一号动力总成和所述二号动力总成上设置的旋翼同时增大或者减小转速、所述三号动力总成和所述四号动力总成上设置的旋翼同时减小或者增大转速得到;
所述偏航控制力拒由所述一号动力总成和所述三号动力总成上设置的旋翼同时增大或者减小转速、所述二号动力总成和所述四号动力总成上设置的旋翼同时减小或者增大转速得到。
当所述四发双旋臂垂直起降无人机处于巡航飞行模式,如图3中的第三状态,飞行速度为第一速度时,飞行动力由所有动力总成同时工作提供,且所述四发双旋臂垂直起降无人机的左外襟副翼和右外襟副翼差动提供滚转控制力矩,所述四发双旋臂垂直起降无人机的左升降舵和右升降舵联动提供俯仰控制力矩,所述一号动力总成和所述二号动力总成联动、所述三号动力总成和所述四号动力总成联动产生的转速差动提供偏航控制力矩;
当所述四发双旋臂垂直起降无人机处于巡航飞行模式,飞行速度为第二速度时,飞行动力由所述二号动力总成和所述三号动力总成提供,所述四发双旋臂垂直起降无人机的左内襟副翼和右内襟副翼处于中立位置不动或作为襟翼以第一角度放下,所述四发双旋臂垂直起降无人机的左外襟副翼和右外襟副翼差动提供滚转控制力矩,所述四发双旋臂垂直起降无人机的左升降舵和右升降舵联动提供俯仰控制力矩,所述二号动力总成与所述三号动力总成转速差动提供偏航控制力矩;
当所述四发双旋臂垂直起降无人机处于巡航飞行模式,飞行速度为第三速度时,飞行动力由所有动力总成同时工作提供,所述四发双旋臂垂直起降无人机的左内襟副翼和右内襟副翼作为襟翼以第二角度放下,所述四发双旋臂垂直起降无人机的左外襟副翼和右外襟副翼差动提供滚转控制力矩,所述四发双旋臂垂直起降无人机的左升降舵和右升降舵联动提供俯仰控制力矩,所述一号动力总成和所述二号动力总成联动、所述三号动力总成和所述四号动力总成联动产生的转速差动提供偏航控制力矩;
所述第二速度大于所述第三速度且小于所述第一速度,所述第一角度小于所述第二角度。
可选的,第一速度为高速,一般约为20m/s~25m/s,第二速度为中速,一般约为12m/s~15m/s,第三速度为低速,一般约为5m/s~8m/s。最高速度与电池电压、电机KV值、螺旋桨螺距正相关,与整机阻力特性负相关。最低速度可以为0m/s,即悬停状态,但能耗较大,当无人机以一定前飞速度飞行时可以有效降低能耗。
需要说明的是,当四发双旋臂垂直起降无人机采用俯仰控制力矩控制飞行时,一号动力总成和四号动力总成上设置的旋翼同时增大或者减小转速,同时所述二号动力总成和所述三号动力总成上设置的旋翼同时减小或者增大转速,速度的变化量由飞行控制器自动控制。可选的,速度的变化量可以根据目标俯仰角、无人机当前俯仰角和俯仰角的变化速率,经过控制算法的解算得出。动力总成增大或减小的转速值是相同的,例如,一号动力总成、四号动力总成转速同时增加100r/min(转/分钟),则二号动力总成、三号动力总成同时减少100r/min。对于俯仰姿态控制,若一号动力总成、四号动力总成同时增大转速,二号动力总成、三号动力总成同时减少转速,则一号动力总成、四号动力总成拉力增大,二号动力总成、三号动力总成拉力减小,飞机获得抬头力矩,俯仰角增大;反之,俯仰角减小。
同理,当四发双旋臂垂直起降无人机采用滚转控制力矩以及偏航控制力矩控制飞行时,动力总成的增大或者减小的原理相同。
在本实施例中,所述一号动力总成和所述二号动力总成联动、所述三号动力总成和所述四号动力总成联动产生的转速差动提供偏航控制力矩,此时控制力矩的大小仍然是由飞行控制器自动控制。例如,四发双旋臂垂直起降无人机由于外界扰动,机头向右偏转,即产生正的偏航角,则飞行控制器感受到偏差后会发出控制信号,使一号动力总成、二号动力总成转速减小,三号动力总成、四号动力总成转速增加,则一号动力总成、二号拉力减小,三号动力总成、四号拉力增加,从而产生向左的滚转力矩,使机头恢复原朝向。
可选的,在四发双旋臂垂直起降无人机纵向提升或者降落过程中,当风力达到预设风力阈值时,由所述四发双旋臂垂直起降无人机的左升降舵和右升降舵同时偏转产生第一气动控制力矩,与所述俯仰控制力矩共同控制所述四发双旋臂垂直起降无人机飞行;
当风力达到预设风力阈值时,由所述四发双旋臂垂直起降无人机的左外襟副翼和左内襟副翼联动、右外襟副翼和右内襟副翼联动形成的差动产生第二气动控制力矩,与所述偏航控制力矩共同控制所述四发双旋臂垂直起降无人机飞行。
在本实施例中,左外襟副翼和左内襟副翼联动指左外襟副翼和左内襟副翼同时向上或向下偏转,差动指一个向上、另一个向下偏转为差动,例如,左外襟副翼和左内襟副翼同时向下偏转,右外襟副翼和右内襟副翼同时向上偏转,左襟副翼和右襟副翼形成差动。
可选的,如图3所示中的第二状态,当所述四发双旋臂垂直起降无人机处于垂直起降向巡航飞行的过渡模式时,动力由所有动力总成同时工作提供,采用滚转控制力矩、俯仰控制力矩以及偏航控制力矩控制所述四发双旋臂垂直起降无人机飞行;
所述滚转控制力矩包括垂直起降状态的滚转方向直接控制力矩和水平飞行状态的气动滚转控制力矩,所述垂直起降状态的滚转方向直接控制力矩由所述一号动力总成和所述二号动力总成上设置的旋翼同时增大或者减小转速、所述三号动力总成和所述四号动力总成上设置的旋翼同时减小或者增大转速得到,所述水平飞行状态的气动滚转控制力矩由所述四发双旋臂垂直起降无人机的左外襟副翼和左内襟副翼联动、右外襟副翼和右内襟副翼联动产生的差动得到;可选的,随着无人机的速度的增加,动力总成的控制权重逐步减小,气动舵面的控制权重逐步增加。
所述俯仰控制力矩包括俯仰方向直接控制力矩和气动俯仰控制力矩,所述俯仰方向直接控制力矩由所述一号动力总成和所述四号动力总成上设置的旋翼同时增大或者减小转速、所述二号动力总成和所述三号动力总成上设置的旋翼同时减小或者增大转速得到,所述气动俯仰控制力矩由所述四发双旋臂垂直起降无人机的左升降舵和右升降舵联动形成的气动力矩得到;可选的,随着无人机的速度的增加,动力总成的控制权重逐步减小,气动舵面的控制权重逐步增加。
所述偏航控制力拒包括垂直起降状态的偏航控制力矩和水平飞行状态的偏航控制力矩,所述垂直起降状态的偏航控制力矩由所述一号动力总成和所述三号动力总成联动、所述二号动力总成和所述四号动力总成联动形成的转速差动产生的反扭矩得到;所述水平飞行状态的偏航控制力矩由所述一号动力总成和所述二号动力总成联动、所述三号动力总成和所述四号动力总成联动形成的转速差动得到。
当飞行速度达到预设速度时,所述四发双旋臂垂直起降无人机的左旋臂在左旋臂驱动机构的驱动下,带着所述一号动力总成和所述二号动力总成逆时针转动90°,与所述四发双旋臂垂直起降无人机的主机翼的左前缘吻合;同时,所述四发双旋臂垂直起降无人机的右旋臂在右旋臂驱动机构的驱动下,带着所述三号动力总成和四号动力总成7顺时针转动90°,与所述主机翼的右前缘吻合,完成垂直起降模式向巡航飞行模式的过渡。
可选的,如图3中的第四状态,当所述四发双旋臂垂直起降无人机处于巡航飞行向垂直起降的过渡模式时,所有动力总成采用第四转速提供动力,所述四发双旋臂垂直起降无人机的左内襟副翼和右内襟副翼采用第三角度向下偏转,所述四发双旋臂垂直起降无人机的左外襟副翼和右外襟副翼采用第四角度向上偏转,形成气动刹车,降低飞行速度;同时,所述滚转控制力矩由所述四发双旋臂垂直起降无人机的左外襟副翼和右外襟副翼差动,以及左水平尾翼和右水平尾翼差动联合提供,所述俯仰控制力矩和所述偏航控制力矩保持不变;可选的,第四转速为较低转速,以便降低无人机的速度,进行飞行状态转换准备。
所述四发双旋臂垂直起降无人机的左旋臂在左旋臂驱动机构的驱动下,带着所述一号动力总成和所述二号动力总成顺时针转动90°,与所述主机翼形成十字形交叉;所述四发双旋臂垂直起降无人机的右旋臂在右旋臂驱动机构的驱动下,带着所述三号动力总成和所述四号动力总成逆时针转动90°,与所述主机翼形成十字形交叉,使动力系统获得飞行姿态控制权;同时,所述一号动力总成和所述四号动力总成同时增大转速,所述二号动力总成、所述三号动力总成同时减小转速,左升降舵和右升降舵同时向上偏转,控制无人机由水平状态转化为垂直状态,完成巡航飞行模式向垂直起降模式的过渡。
上述四发双旋臂垂直起降无人机的飞行控制方法,四发双旋臂垂直起降无人机可以垂直起降,对起飞或者降落场地要求低,垂直飞行阶段以四个动力总成上的四旋翼直接力控制为主要控制方式,控制力持续、充足、可靠,以气动舵面为辅助控制方式,控制的鲁棒性大大增强;在巡航飞行模式下,避免了固定翼-四旋翼复合无人机巡航模式下的四旋翼机臂、电机、螺旋桨等成为死重以及固定式四旋翼机臂空气阻力大的缺点,提高了整机的升阻比,使得本发明提供的无人机的飞行控制方式的气动效率高、巡航时间长、巡航速度快;另外,巡航飞行模式中可选择性地关闭一号动力总成、四号动力总成,同时采用折叠式螺旋桨,可进一步减小阻力、减小电量消耗,提高续航时间。在本实施例中,综合了动力控制和气动舵面控制方法,能够根据不同的飞行模式、飞行速度,使动力装置构成不同的动力组合形态、气动舵面发挥不同的控制作用,且各舵面互为冗余,可靠性高。
应理解,上述实施例中各步骤的序号的大小并不意味着执行顺序的先后,各过程的执行顺序应以其功能和内在逻辑确定,而不应对本发明实施例的实施过程构成任何限定。
以上所述实施例仅用以说明本发明的技术方案,而非对其限制;尽管参照前述实施例对本发明进行了详细的说明,本领域的普通技术人员应当理解:其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分技术特征进行等同替换;而这些修改或者替换,并不使相应技术方案的本质脱离本发明各实施例技术方案的精神和范围,均应包含在本发明的保护范围之内。
- 四发双旋臂垂直起降无人机及其飞行控制方法
- 四发双旋臂垂直起降无人机及其飞行控制方法