投料装置及烹饪机
文献发布时间:2023-06-19 09:55:50
技术领域
本发明创造涉及烹饪器具领域,特别涉及投料装置及烹饪机。
背景技术
现有的自动投料装置,如公开号为CN210727489U的“投料装置以及烹饪机”以及公开号为CN210727550U的“一种自动厨房的自动投料输送模组及烹饪机”,均包括横向运动模块、垂直运动模块和翻转模块,每个模块均由对应的电机进行驱动,以分别实现行走、升降以及投料的动作,但这样的设置成本较高。
发明内容
本发明创造旨在提供一种投料装置,以解决现有技术中所存在的一个或多个技术问题,至少提供一种有益的选择或创造条件。
本发明创造还提供一种具有上述投料装置的烹饪机。
根据本发明创造的第一方面实施例的投料装置,包括:
面板;
料盒,其数量为多个,多个所述料盒左右排布在所述面板上,每个料盒的前侧面均设有第一磁性部;
行走模块,其安装于所述面板,所述行走模块包括行走驱动装置和行走滑块,所述行走驱动装置带动所述行走滑块进行左右移动;所述行走滑块上固定连接有上下设置的升降杆,升降杆的顶部设有齿条部;
升降翻转模块,其包括升降驱动装置和升降滑套,所述升降驱动装置带动所述升降滑套沿所述升降杆进行上下移动,所述升降滑套铰接有前后翻转臂,前后翻转臂的一端设有可与所述齿条部进行啮合的齿轮部,前后翻转臂的另外一端固定连接有拾取头,所述拾取头设有第二磁性部,第二磁性部的升降路径可与所述第一磁性部相交。
根据本发明创造实施例的投料装置,至少具有如下有益效果:行走驱动装置能够带动行走滑块进行左右移动,使得设置在升降滑套上的拾取头能够移动至目标料盒处,当升降驱动装置带动升降滑套沿升降杆向上进行移动时,所述拾取头通过磁力拾取目标料盒并带动目标料盒一同向上移动,当升降滑套上升至一定高度后,前后翻转臂的齿轮部开始与升降杆顶部上的齿条部进行啮合,由于所述齿条部为固定设置,所述前后翻转臂为铰接设置,因此所述齿轮部在啮合的过程中发生转动,以带动所述前后翻转臂进行转动,随着升降滑套逐渐向上移动,所述前后翻转臂逐渐带动所述拾取头进行翻转,直至目标料盒被翻转至处于倒扣状态为止;与现有技术相比,本发明创造只需采用两个驱动装置即可完成对料盒的行走、升降以及投料,有效地降低了成本。
根据本发明创造的一些实施例,面板的上表面设有左右设置的导轨,所述导轨位于料盒的前方,所述行走滑块滑动连接于所述导轨;或者,所述面板开设有左右设置的滑槽,所述滑槽位于料盒的前方,所述行走滑块滑动连接于所述滑槽。设置导轨的好处在于能够避免在面板上开孔,防止物料掉落至面板之下,而滑槽则不具有该优点。
根据本发明创造的一些实施例,所述行走驱动装置包括行走电动卷筒、行走牵引线以及若干个行走滑轮,所述行走电动卷筒位于所述面板之下。将行走电动卷筒设置于面板之下,以使面板上腾出足够的投料空间。
根据本发明创造的一些实施例,所述行走牵引线缠绕在所述行走电动卷筒上,行走牵引线的首末两端均与所述行走滑块连接,所述行走滑轮用以支承所述行走牵引线。当所述行走电动卷筒正转时,在行走牵引线的带动下,所述行走滑块沿正方向进行移动,当所述行走电动卷筒反转时,在行走牵引线的带动下,所述行走滑块沿反方向进行移动。
根据本发明创造的一些实施例,所述升降驱动装置包括升降电动卷筒、升降牵引线以及若干个升降滑轮,所述升降电动卷筒位于所述面板之下。将升降电动卷筒设置于面板之下,以使面板上腾出足够的投料空间。
根据本发明创造的一些实施例,所述升降牵引线缠绕在所述升降电动卷筒上,升降牵引线的首末两端均与所述升降滑套连接,所述升降滑轮用以支承所述升降牵引线。当所述升降电动卷筒正转时,在升降牵引线的带动下,所述升降滑套沿正方向进行移动,当所述升降电动卷筒反转时,在升降牵引线的带动下,所述升降滑套沿反方向进行移动。
根据本发明创造的一些实施例,由于所述升降滑套可跟随所述行走滑块一同进行左右移动,因此当所述行走滑块进行左右移动时,为了避免所述行走电动卷筒与所述升降电动卷筒发生干涉,所述升降电动卷筒与所述行走电动卷筒联动。
根据本发明创造的一些实施例,为了避免所述行走牵引线与所述升降牵引线相互缠绕,所述行走牵引线与所述升降牵引线错位设置。
根据本发明创造的一些实施例,所述面板上设有多个左右排布的定位槽,多个所述料盒分别放置在对应的定位槽上。所述定位槽对所述料盒提供定位作用,以确保每个料盒的位置。
根据本发明创造的第二方面实施例的烹饪机,包括烹饪容器和上述的投料装置,所述烹饪容器位于投料装置的投料范围内。
根据本发明创造实施例的烹饪机,至少具有如下有益效果:所述烹饪机能够实现全自动投料,可将目标料盒中的食材自动投料至烹饪容器中,以实现自动烹饪的目的。
本发明创造的附加方面和优点将在下面的描述中部分给出,部分将从下面的描述中变得明显,或通过本发明创造的实践了解到。
附图说明
本发明创造的上述和/或附加的方面和优点从结合下面附图对实施例的描述中将变得明显和容易理解,其中:
图1是根据本发明创造实施例的投料装置的立体结构示意图;
图2是根据本发明创造实施例的行走模块和升降翻转模块的立体结构示意图;
图3是根据本发明创造实施例的行走模块的立体结构示意图;
图4是根据本发明创造实施例的升降翻转模块的立体结构示意图;
图5是根据本发明创造实施例的升降翻转模块在开始翻转时的立体结构示意图。
具体实施方式
下面详细描述本发明创造的实施例,所述实施例的示例在附图中示出,其中自始至终相同或类似的标号表示相同或类似的元件或具有相同或类似功能的元件。下面通过参考附图描述的实施例是示例性的,仅用于解释本发明创造,而不能理解为对本发明创造的限制。
在本发明创造的描述中,需要理解的是,涉及到方位描述,例如上、下、前、后、左、右等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明创造和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明创造的限制。
在本发明创造的描述中,若干的含义是一个或者多个,多个的含义是两个以上,大于、小于、超过等理解为不包括本数,以上、以下、以内等理解为包括本数。如果有描述到第一、第二只是用于区分技术特征为目的,而不能理解为指示或暗示相对重要性或者隐含指明所指示的技术特征的数量或者隐含指明所指示的技术特征的先后关系。
本发明创造的描述中,除非另有明确的限定,设置、安装、连接等词语应做广义理解,所属技术领域技术人员可以结合技术方案的具体内容合理确定上述词语在本发明创造中的具体含义。
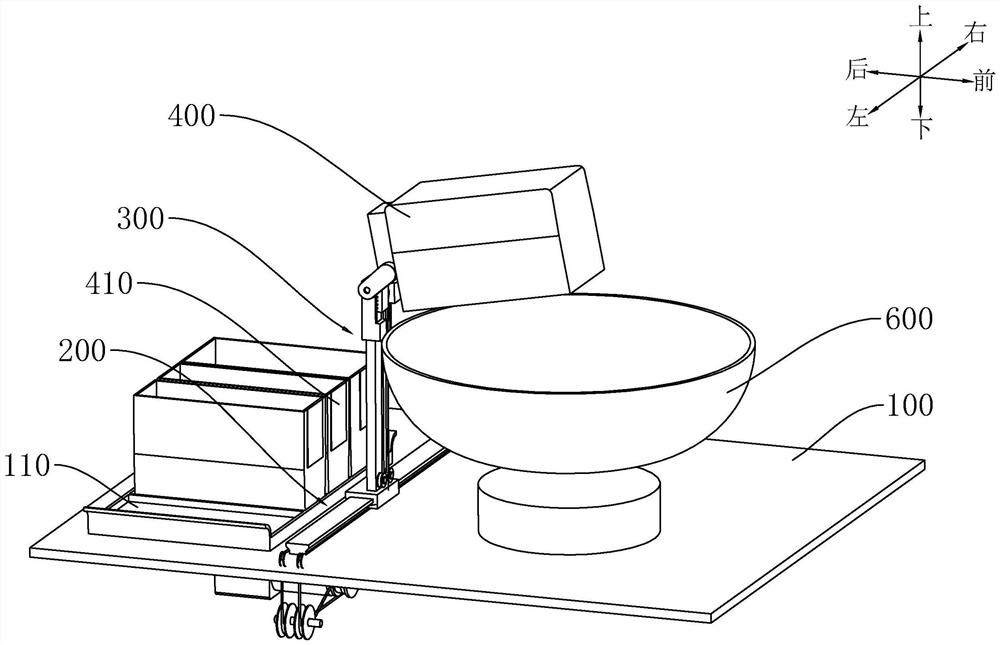
如图1和图2所示,根据本发明创造的第一方面实施例的投料装置,包括面板100、行走模块200和升降翻转模块300,所述面板100上设有多个左右排布的定位槽110,每个所述定位槽110上均放置有一个用以储存食材的料盒400,使得多个所述料盒400左右排布在所述面板100上,且每个料盒400的前侧面均设有第一磁性部410,所述第一磁性部410可选为铁或者磁铁。可以理解的是,为了确保每个料盒400的位置,定位槽110的尺寸规格与对应料盒400的尺寸规格一一对应。
如图1和图3所示,所述行走模块200包括行走驱动装置、导轨220以及行走滑块230,所述导轨220沿左右方向设置于面板100的上表面,所述导轨220位于料盒400的前方,所述行走滑块230滑动连接于所述导轨220,所述行走驱动装置用以带动所述行走滑块230沿所述导轨220进行左右移动。所述行走驱动装置位于所述面板100的下方,所述行走滑块230和所述导轨220均位于所述面板100的上方,使得所述面板100上预留有足够的投料空间。为了使所述行走驱动装置能够带动所述行走滑块230沿所述导轨220进行左右移动,所述行走驱动装置具体包括行走电动卷筒211、行走牵引线212以及若干个行走滑轮213,所述行走电动卷筒211位于所述面板100之下,所述行走牵引线212缠绕在所述行走电动卷筒211上,所述面板100上开设有两个可供所述行走牵引线212穿行的行走线孔,行走牵引线212的首末两端分别与行走滑块230的左部和右部进行连接,所述行走滑轮213用以支承所述行走牵引线212;当所述行走电动卷筒211转动时,若位于行走滑块230左侧的牵引线收缩,而位于行走滑块230右侧的牵引线伸长,此时所述行走滑块230沿所述导轨220向左进行移动,当所述行走电动卷筒211反转时,所述行走滑块230则沿所述导轨220向右进行移动。可以理解的是,所述行走滑轮213的设置方式可根据其数量进行灵活变通,例如在本实施例中,所述行走滑轮213的数量为四个,每两个所述行走滑轮213均上下分布并形成行走滑轮组,两个行走滑轮组分别位于所述导轨220的左右两侧,但本发明创造并没有对行走滑轮213的数量以及设置方式进行限定,只要所述行走电动卷筒211能够通过所述行走牵引线212来带动所述行走滑块230沿所述导轨220进行左右移动的话,无论所述行走滑轮213的数量以及设置方式如何,都属于本发明创造的保护范围。
在另一些实施例中,可将所述导轨220替换为滑槽,即所述面板100开设有左右设置的滑槽(附图未示出),所述滑槽位于料盒400的前方,所述行走滑块230滑动连接于所述滑槽,所述行走驱动装置包括但不限于气缸、电动推杆或者齿轮齿条移动机构等,此时所述行走驱动装置无需通过行走牵引线212来带动所述行走滑块230。但本实施例与上一实施例相比,由于本实施例需要在面板100上开设有滑槽,因此面板100上的物料容易通过所述滑槽掉落至面板100之下,从而影响所述行走驱动装置的使用。通过综合考虑,本发明创造优先选用设置有导轨220的实施例,且以下的实施例均以此实施例为基础。
如图1和图4所示,所述升降运动模块包括升降驱动装置、升降杆320以及升降滑套330,所述升降杆320沿上下方向设置并固定连接于所述行走滑块230,所述升降滑套330滑动连接于所述升降杆320,所述升降驱动装置用以带动所述升降滑套330沿所述升降杆320进行上下移动。为了使所述升降驱动装置能够带动所述升降滑套330沿所述升降杆320进行左右移动,所述升降驱动装置具体包括升降电动卷筒311、升降牵引线312以及若干个升降滑轮313,所述升降电动卷筒311位于所述面板100之下,所述升降牵引线312缠绕在所述升降电动卷筒311上,所述面板100上开设有两个可供所述升降牵引线312穿行的升降线孔,升降牵引线312的首末两端分别与升降滑套330的上部和下部进行连接,所述升降滑轮313用以支承所述升降牵引线312;当所述升降电动卷筒311转动时,若位于升降滑套330上侧的牵引线收缩,而位于升降滑套330下侧的牵引线伸长,此时所述升降滑套330沿所述升降杆320向上进行移动,当所述升降电动卷筒311反转时,所述升降滑套330则沿所述升降杆320向下进行移动。可以理解的是,所述升降滑轮313的设置方式可根据其数量进行灵活变通,例如在本实施例中,所述升降滑轮313的数量为七个,其中所述导轨220的左右两侧分别设有一个升降滑轮组,每个所述升降滑轮组均包括两个上下分布的升降滑轮313,另外两个升降滑轮313设置在所述升降杆320的底部,最后一个升降滑轮313设置在所述升降杆320的顶部,但本发明创造并没有对升降滑轮313的数量以及设置方式进行限定,只要所述升降电动卷筒311能够通过所述升降牵引线312来带动所述升降滑套330沿所述升降杆320进行上下移动的话,无论所述升降滑轮313的数量以及设置方式如何,都属于本发明创造的保护范围。除此之外,所述行走电动卷筒211和所述升降电动卷筒311虽然同为电动卷筒,但在本发明创造的一些实施例中,还可以采用气动卷筒去进行替代,而不限于此。
如图2所示,为了便于滑轮的安装,可对部分滑轮进行整合,具体地,可对位于导轨220左侧的行走滑轮组和升降滑轮组进行合并设置,并对位于导轨220右侧的行走滑轮组和升降滑轮组进行合并设置,即每个行走滑轮213与对应的升降滑轮313共用同一个转轴301。与此同时,为了避免所述行走牵引线212与所述升降牵引线312相互缠绕,所述行走牵引线212与所述升降牵引线312错位设置,两者错位设置的方式可参照图2。
需要进一步说明的是,由于所述升降滑套330可跟随所述行走滑块230一同进行左右移动,因此当所述行走滑块230进行左右移动时,为了避免所述行走电动卷筒211与所述升降电动卷筒311发生干涉,所述升降电动卷筒311需与所述行走电动卷筒211进行联动,即当所述行走电动卷筒211转动时,所述升降电动卷筒311需以相同的线速度进行反向转动,以确保所述升降滑套330不随所述行走滑块230的移动而移动。另外,由于升降滑套330的上下移动独立于所述行走滑块230,因此当所述升降滑套330进行上下移动时,所述行走电动卷筒211不需要与所述升降电动卷筒311进行联动,即当所述升降电动卷筒311转动时,所述行走电动卷筒211停止工作。
如图1和图5所示,为了实现投料的功能,升降杆320的顶部设有齿条部321,所述齿条部321朝后设置,所述升降滑套330铰接有前后翻转臂340,所述前后翻转臂340可绕铰接点进行前后转动,前后翻转臂340的一端设有可与所述齿条部321进行啮合的齿轮部341,前后翻转臂340的另外一端固定连接有拾取头500,所述拾取头500设有第二磁性部510,所述第二磁性部510可选为电磁铁,第二磁性部510的升降路径可与所述第一磁性部410相交。所述行走驱动装置能够带动所述行走滑块230沿所述导轨220进行左右移动,当所述拾取头500被移动至目标料盒400处后,所述升降驱动装置随即带动升降滑套330沿升降杆320向上进行移动,所述拾取头500通过磁力拾取目标料盒400并带动目标料盒400一同向上移动,当所述前后翻转臂340上升至一定高度后,其齿轮部341开始与所述齿条部321进行啮合,由于所述齿条部321为固定设置,所述前后翻转臂340为铰接设置,且齿轮部341的圆心位于前后翻转臂340的铰接点上,因此所述齿轮部341在啮合的过程中发生转动,以带动所述前后翻转臂340进行转动,随着升降滑套330逐渐向上移动,所述前后翻转臂340逐渐带动所述拾取头500进行翻转,直至目标料盒400被翻转至处于倒扣状态为止,此时可参照图1。
如图1所示,根据本发明创造的第二方面实施例的烹饪机,包括根据本发明创造上述第一方面实施例的投料装置以及烹饪容器600,所述烹饪容器600位于投料装置的投料范围内。所述烹饪机可将目标料盒400中的食材自动投料至烹饪容器600中,以实现全自动投料,为自动烹饪提供技术支持。
在本发明创造的一些实施例中,所述投料装置通过控制器(附图未示出)进行自动控制,所述控制器包括但不限于单片机、FPGA或者PLC。由于采用单片机、FPGA或者PLC作为控制器是行业内比较通用的技术手段,因此本发明创造不再对其控制原理进行详细论述。
采用上述的结构,所述烹饪机的自动投料步骤如下:
1、所述拾取头500位于原点位置,当控制器接收到投料指令后,所述行走电动卷筒211带动所述行走滑块230沿所述导轨220移动至目标料盒400的位置处,在此过程中,所述升降电动卷筒311以相同的线速度进行反转;
2、所述升降电动卷筒311带动所述升降滑套330沿所述升降杆320向上移动,使得所述拾取头500通过磁力拾取目标料盒400并带动目标料盒400一同向上移动,当目标料盒400上升至高于其余的料盒400后,所述升降电动卷筒311停止工作;
3、所述行走电动卷筒211带动所述行走滑块230沿所述导轨220移动至烹饪容器600的位置处,在此过程中,所述升降电动卷筒311以相同的线速度进行反转;
4、所述升降电动卷筒311带动所述升降滑套330沿所述升降杆320向上移动,当升降滑套330上升至一定高度后,前后翻转臂340的齿轮部341开始与升降杆320顶部上的齿条部321进行啮合,并随着升降滑套330逐渐向上移动,所述前后翻转臂340逐渐带动所述拾取头500进行翻转,直至目标料盒400被翻转至处于倒扣状态为止,此时目标料盒400中的食材被投放至烹饪容器600中;
5、所述升降电动卷筒311带动所述升降滑套330沿所述升降杆320逐渐向下移动,在此过程中,所述前后翻转臂340逐渐带动所述拾取头500进行复位,直至目标料盒400被放平;
6、所述行走电动卷筒211带动所述行走滑块230沿所述导轨220移动至目标料盒400的定位槽110处,在此过程中,所述升降电动卷筒311以相同的线速度进行反转;
7、所述升降电动卷筒311带动所述升降滑套330沿所述升降杆320向下移动,使得目标料盒400被重新放置在对应的定位槽110上;
8、拾取头500的第二磁性部510断电失磁,使得所述拾取头500与目标料盒400分离,最后所述拾取头500返回至原点位置,等待下一次的投料指令。
需要说明的是,当所述行走滑块230位于左限位,而所述升降滑套330位于下限位时,此时所述拾取头500所处的位置为原点位置;在步骤2至步骤7期间,拾取头500的第二磁性部510需要保持通电带磁,以防止目标料盒400的脱落。
上面结合附图对本发明创造实施例作了详细说明,但是本发明创造不限于上述实施例,在所述技术领域普通技术人员所具备的知识范围内,还可以在不脱离本发明创造宗旨的前提下作出各种变化。
- 一种烹饪投料装置以及烹饪机
- 烹饪辅料投料机以及自动烹饪机