汽车双组动力离合四驱系统
文献发布时间:2023-06-19 10:03:37
技术领域
本发明属于车辆动力传动系统,具体是涉及一种基于两种动力离合组合成前后桥混合驱动的四驱系统。
背景技术
新能源汽车近几年在国内的保有量越发增多,但是人们对于新能源汽车的接受度尚处于较低水平,特别是对纯电动汽车,最主要的原因还是续航里程和最高时速。目前大多数的纯电动汽车,在高速路上行驶时,其耗能情况比燃油车更严重,其加速能力却是远远比不过燃油车,尽管在市区行驶时较为节能,但是高速路上的表现不尽人意让人望而却步。纯电动汽车在高速路上耗能严重只要因为纯电动汽车基本只配置单级减速器,电机一直工作在一个传动比上,在车速较高的情况下,电机转速偏高,无法工作在高效的运行区间上。纯电动汽车如何实现在高速上降低能耗,是我国新能源汽车开发的一大技术关键点。对于混合动力汽车,各车企倾向于在燃油车动力系统简单添置电机模块,导致动力系统整体过于臃肿,同时电机模块并不能有效地发挥应有的作用。
针对新能源汽车的动力技术特点,电动汽车的驱动靠的是动力系统配备的电动机,在中低速时,电动机的转速较低、驱动效率高,因此纯电动汽车中低速行驶的节能效果理想,适合于市区内行驶,但中高速行驶的耗能严重,只要是汽车在中高速时,风阻越发增大,而电动机大多是配置单速减速器,因此电动机从起步到高速始终工作在固定速比上,电动机在高转速下的电流偏大,同时也没法在高效工作区间运转,整个电驱动处于高负荷状态,实际耗能比燃油汽车还严重。
电机相对于发动机来说体积更小,而且并不需要占据大量空间的排气系统,使得可以在汽车内部布置双电机甚至三电机,目前市面上使用较多的是前置电动机+后置电动机的双电机方案。由于双电机直接驱动输出动力,导致上述存在的问题尚未得到解决。
发明内容
本发明要解决的技术问题是提供一种中低速动力强劲兼具中高速低耗能的汽车双组动力离合四驱系统。
为了解决上述技术问题,本发明采用的技术方案为:一种汽车双组动力离合四驱系统,包括用于给前轮提供动力的前桥驱动总成和用于给后轮提供动力的后桥驱动总成,所述前桥驱动总成采用制动传动系统、拨叉传动系统或离合传动系统;相应地,所述后桥驱动总成采用制动传动系统、拨叉传动系统或离合传动系统。
优选之,所述制动传动系统包括动力源,动力源通过行星组件传动差速器以输出动力。
优选之,所述行星组件由太阳轮、行星轮、齿圈和行星架构成,太阳轮与行星轮外啮合传动,多个行星轮均布于行星架上且与齿圈内啮合传动;所述动力源驱动太阳轮、齿圈或行星架,太阳轮或齿圈与制动机构连接,行星架或齿圈传动差速器以输出动力。
优选之,所述拨叉传动系统包括动力源,动力源传动输入齿轮,输入齿轮通过拨叉机构传动输出齿轮,输出齿轮传动差速器以输出动力。
优选之,所述拨叉机构由接合花键、接合套和花键毂构成,接合花键与接合套相互嵌合传动或分离,接合套安装花键毂上;所述输入齿轮传动接合花键或花键毂,花键毂或接合花键传动输出齿轮。
优选之,所述离合传动系统包括动力源,动力源传动输入齿轮,输入齿轮通过动力离合器传动输出齿轮,输出齿轮传动差速器以输出动力。
优选之,所述动力离合器由离合器主动端和离合器被动端构成,离合器主动端与离合器被动端相互离合传动;所述输入齿轮传动离合器主动端,离合器被动端传动输出齿轮。
实施上述技术方案,提出一种基于多种动力离合组合成前桥驱动总成和后桥驱动总成的四驱动力系统,使前后桥驱动总成各自灵活配置中低速和中高速的驱动系统,前后桥驱动总成先通过制动、拨叉和离合选择各自最佳输出动力再进行叠加以获得行驶最佳工况,实现汽车兼具中低速行驶区间和中高速行驶区间,突出中低速段动力强劲、起步快速和中高速段能耗更低、安全操控的综合性能。
附图说明
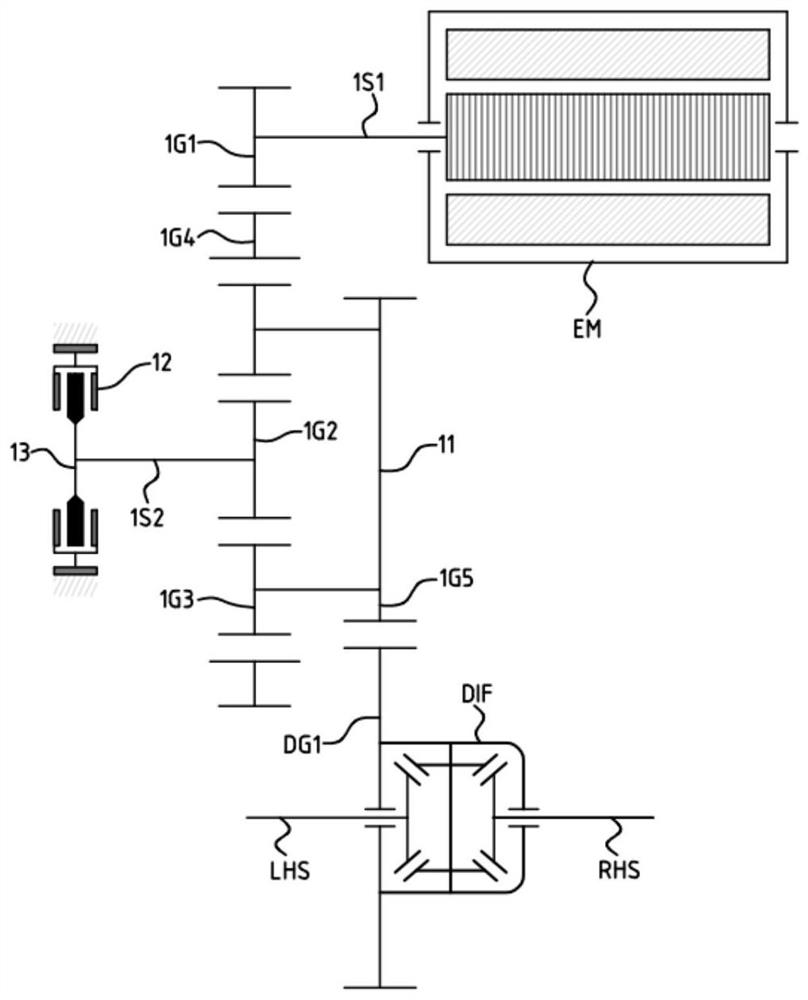
图1为第一种制动传动系统的原理图。
图2为第二种制动传动系统的原理图。
图3为第三种制动传动系统的原理图。
图4为第一种拨叉传动系统的原理图。
图5为第二种拨叉传动系统的原理图。
图6为第一种离合传动系统的原理图。
图7为第二种离合传动系统的原理图。
图中:EM-电机,ICE-发动机,DIF-差速器,LHS-左半轴,RHS-右半轴,11-行星架,12-制动器,13-摩擦盘,14-支撑轴承,15-弹性减震器,22-中间制动器,23-中间摩擦盘,1S1-电机轴,1S2-制动轴,2S2-中间轴,2S3-中间后轴,1G1-电机齿轮,1G2-太阳轮,1G3-行星轮,1G4-齿圈,1G5-行星架齿轮,2G2-输入齿轮,2G3-输出齿轮,DG1-差速器齿轮,2B1-接合花键,2B2-接合套,2B3-花键毂,1C-发动机离合器,1C1-发动机离合器主动端,1C2-发动机离合器被动端,2C-动力离合器,2C1-动力离合器主动端,2C2-动力离合器被动端
具体实施方式
下面结合附图对本发明的具体实施方式作进一步说明。在此需要说明的是,对于这些实施方式的说明用于帮助理解本发明,但并不构成对本发明的限定。此外,下面所描述的本发明各个实施方式中所涉及的技术特征只要彼此之间未构成冲突就可以相互组合。
汽车双组动力离合四驱系统由前桥驱动总成和后桥驱动总成两部分构成,前桥驱动总成采用制动传动系统、拨叉传动系统或离合传动系统,后桥驱动总成采用制动传动系统、拨叉传动系统或离合传动系统。前桥驱动总成的任一传动系统配置后桥驱动总成的任一传动系统,形成多种动力离合驱动模式的汽车双组动力离合四驱系统(如下表所示),不同的动力离合驱动系统均可按需搭配于汽车的前驱动系统和后驱动系统之上,也可与无动力离合电驱动系统搭配组合形成四驱纯电动系统,还可以与传统燃油车的发动机+变速器驱动系统或发动机+电机专用混合动力驱动系统搭配组合形成四驱混合动力系统。
中低速电驱动系统是具备动力离合功能的动力系统,当汽车在常规工况时的起步和中低速行驶时,电动机与动力输出端的动力接合,驱动汽车行驶。当汽车进入中高速的常规行驶工况时,电动机与动力输出端的动力切断,由中高速电驱动系统负责驱动汽车行驶。
中低速电驱动系统的优势:1、考虑汽车在起步和中低速区间时的各种行驶场景,包括斜坡起步行驶,大负重起步行驶等,整车往往是需求大扭矩输出,因此电动机至车轮是采用大速比的减速设计,大速比减速设计使得汽车得到更大的输出扭矩,但随着汽车车速提高,电动机的转速也由于大速比减速而提升得更快。此时在动力系统内增加动力离合动能,在车辆达到某一车速时,切断电动机动力传递,让中高速电驱动系统接管驱动汽车任务,保证中低速电驱动系统不会由于电动机转速过高而耗能严重,同时,也避免中低速电驱动系统的电动机出现高速拖拽现象。2、由于中低速电驱动系统只负责中低速区间,因此在动力设计时不用考虑中高速区间的动力输出,自身系统的减速速比可增大以得到更大输出扭矩,同时对电动机的性能要求降低。
中高速驱动系统可以是具备动力离合功能的动力系统,也可以是无动力离合功能的动力系统,当汽车在常规工况时的中高速行驶时,电动机与动力输出端的动力接合(无动力离合功能的动力系统电动机与动力输出端的动力始终接合),驱动汽车行驶。
中高速驱动系统的优势:1、中高速电驱动系统只考虑汽车在中高速区间的行驶场景,因此电动机至车轮是采用小速比的减速设计,使得在高速行驶中,车速对应的电动机转速更低,同时电动机依然有足够的扭矩储备应付后续高速段加速,从而降低电动机在汽车高速行驶中的电流,减少电驱动系统的负荷,解决电动汽车高速行驶耗能严重的问题。2、中高速电驱动系统采用的是小速比减速设计,因此在中低速区间时,该系统的电动机的被反拖的转速低,对电动机的损耗极小,因此,中高速电驱动系统可不设置动力离合功能。
本发明还可以应用于新能源汽车混合动力领域,中低速电驱动系统同样是具备动力离合功能的动力系统,负责汽车在常规工况时的起步和中低速行驶的动力输出。取消中高速电驱动系统,发动机动力系统负责驱动汽车在中高速区间行驶。在常规行驶过程中,发动机动力系统在汽车中低速区间时不输出动力。中低速电驱动系统和发动机动力系统分别驱动汽车的前车桥和后车桥,反之亦可,也可以分别与前后车桥组合成前驱动桥和后驱动桥。
如图1所示,第一种制动传动系统由电机EM、行星组件、制动机构和差速器总成组成,其中制动机构与行星组件同轴安装,电机EM、行星组件和差速器总成相互平行轴安装。
行星组件由太阳轮1G2、行星轮1G3、齿圈1G4和行星架11组成,其中,太阳轮1G2与行星轮1G3外啮合,行星轮1G3与齿圈1G4内啮合。行星轮1G3还可以是双排齿轮,其中一排与太阳轮1G2外啮合,另一排与齿圈1G4内啮合。
电机EM的转子通过电机轴1S1与电机齿轮1G1固定连接,齿圈1G4的外圆周上加工有外齿圈,内圆周上加工有内齿圈,电机齿轮1G1与齿圈1G4的外齿圈外啮合。
多个行星轮1G3均布在行星架11上,行星架齿轮1G5固定连接于行星架11上,行星架齿轮1G5直接或间接与差速器齿轮DG1啮合(本发明图例画出的是直接啮合,间接啮合是指行星架齿轮1G5通过中间轴齿轮组与差速器齿轮DG1实现动力衔接)。
制动机构由摩擦盘13、制动器12、制动轴1S2组成,摩擦盘13通过制动轴1S2与太阳轮1G2固定连接,摩擦盘13按一定间隙安装在制动器12的内腔内,制动器12固定安装于壳体。
差速器总成由差速器齿轮DG1、差速器DIF、左半轴LHS和右半轴RHS组成,差速器齿轮G8固定安装在差速器DIF,差速器DIF通过左半轴LHS和右半轴RHS输出动力。
本制动传动系统的驱动模式是:当此电驱动系统需要驱动汽车行驶时,控制器指示制动器12锁止摩擦盘13,进而,太阳轮1G2被制动,电机EM从车载电源处获得电能输出动力,电机EM将动力经电机轴1S1传递给电机齿轮1G1,电机齿轮1G1将动力传递给齿圈1G4,齿圈1G4将动力经行星轮1G3传递给行星架11,行星架11将动力经行星架齿轮1G5传递给差速器齿轮DG1,差速器齿轮DG1将动力经差速器DIF传递给左半轴S5和右半轴S6输出动力。
当此电驱动系统无需驱动汽车行驶时,电机EM关闭处于被动随转状态,控制器指示制动器12释放摩擦盘13,即太阳轮1G2处于释放状态,此时,行星组件处于无动力输出状态,电机EM与差速器总成实现动力分离。但行星组件与差速器总成仍处于啮合状态,差速器齿轮DG1仍会反拖行星组件转动,为防止因车速提高导致行星组件某一部件的转速过高,在车速已知的情况下,行星架11的转速也是已知,控制器可微调电机EM的转速,从而微调齿圈1G4的转速,从而达到控制太阳轮1G2转速的作用,因此,可通过控制器将电机EM、齿圈1G4和太阳轮1G2的转速调整至相对合理的范围,防止行星组件某一部件的转速过高,造成高速拖拽现象,同时提高效率。
如图2所示,第二种制动传动系统由电机EM、行星组件、制动机构和差速器总成组成,其中电机EM、制动机构与行星组件同轴安装,差速器总成和行星组件平行轴安装。
行星组件由太阳轮1G2、行星轮1G3、齿圈1G4和行星架11组成,其中,太阳轮1G2与行星轮1G3外啮合,行星轮1G3与齿圈1G4内啮合。
电机EM的转子通过电机轴1S1与太阳轮1G2固定连接,多个行星轮1G3均布在行星架11上。行星架齿轮1G5固定连接于行星架11上,行星架齿轮1G5直接或间接与差速器齿轮DG1啮合。
制动机构由摩擦盘13、制动器12组成,摩擦盘13通过与齿圈1G4固定连接,摩擦盘13按一定间隙安装在制动器12的内腔内,制动器12固定安装于壳体。
差速器总成由差速器齿轮DG1、差速器DIF、左半轴LHS和右半轴RHS组成,差速器齿轮G8固定安装在差速器DIF,差速器DIF通过左半轴LHS和右半轴RHS输出动力。
本制动传动系统的驱动模式是:当此电驱动系统需要驱动汽车行驶时,控制器指示制动器12锁止摩擦盘13,进而,齿圈1G4被制动,电机EM从车载电源处获得电能输出动力,电机EM将动力经电机轴1S1传递给太阳轮1G2,太阳轮1G2将动力经行星轮1G3传递给行星架11,行星架11将动力经行星架齿轮1G5传递给差速器齿轮DG1,差速器齿轮DG1将动力经差速器DIF传递给左半轴S5和右半轴S6输出动力。
当此电驱动系统无需驱动汽车行驶时,电机EM关闭处于被动随转状态,控制器指示制动器12释放摩擦盘13,即齿圈1G4处于释放状态,此时,行星组件处于无动力输出状态,电机EM与差速器总成实现动力分离。但行星组件与差速器总成仍处于啮合状态,差速器齿轮DG1仍会反拖行星组件转动,为防止因车速提高导致行星组件某一部件的转速过高,在车速已知的情况下,行星架11的转速也是已知,控制器可微调电机EM的转速,从而微调太阳轮1G2的转速,从而达到控制齿圈1G4转速的作用,因此,可通过控制器将电机EM、齿圈1G4和太阳轮1G2的转速调整至相对合理的范围,防止行星组件某一部件的转速过高,造成高速拖拽现象,同时提高效率。
如图3所示,第三种制动传动系统由电机EM、行星组件、制动机构和差速器总成组成,其中制动机构与行星组件同轴安装,电机EM、行星组件和差速器总成相互平行轴安装。
行星组件由太阳轮1G2、行星轮1G3、齿圈1G4和行星架11组成,其中,太阳轮1G2与行星轮1G3外啮合,行星轮1G3与齿圈1G4内啮合。
电机EM的转子通过电机轴1S1与电机齿轮1G1固定连接,行星架齿轮1G5固定连接于行星架11上,电机齿轮1G1与行星架齿轮1G5外啮合,多个行星轮1G3均布在行星架11上。
齿圈1G4的外圆周上加工有外齿圈,内圆周上加工有内齿圈,齿圈1G4的外齿圈直接或间接与差速器齿轮DG1啮合。
制动机构由摩擦盘13、制动器12、制动轴1S2组成,摩擦盘13通过制动轴1S2与太阳轮1G2固定连接,摩擦盘13按一定间隙安装在制动器12的内腔内,制动器12固定安装于壳体。
差速器总成由差速器齿轮DG1、差速器DIF、左半轴LHS和右半轴RHS组成,差速器齿轮G8固定安装在差速器DIF,差速器DIF通过左半轴LHS和右半轴RHS输出动力。
本制动传动系统的驱动模式是:当此电驱动系统需要驱动汽车行驶时,控制器指示制动器12锁止摩擦盘13,进而,太阳轮1G2被制动,电机EM从车载电源处获得电能输出动力,电机EM将动力经电机轴1S1传递给电机齿轮1G1,电机齿轮1G1将动力经行星架齿轮1G5传递给行星架11,行星架11将动力经行星轮1G3传递给齿圈1G4,齿圈1G4将动力传递给差速器齿轮DG1,差速器齿轮DG1将动力经差速器DIF传递给左半轴S5和右半轴S6输出动力。
当此电驱动系统无需驱动汽车行驶时,电机EM关闭处于被动随转状态,控制器指示制动器12释放摩擦盘13,即太阳轮1G2处于释放状态,此时,行星组件处于无动力输出状态,电机EM与差速器总成实现动力分离。但行星组件与差速器总成仍处于啮合状态,差速器齿轮DG1仍会反拖行星组件转动,为防止因车速提高导致行星组件某一部件的转速过高,在车速已知的情况下,齿圈1G4的转速也是已知,控制器可微调电机EM的转速,从而微调行星架11的转速,从而达到控制太阳轮1G2转速的作用,因此,可通过控制器将电机EM、行星架11和太阳轮1G2的转速调整至相对合理的范围,防止行星组件某一部件的转速过高,造成高速拖拽现象,同时提高效率。
如图4所示,第一种拨叉传动系统由电机EM、中间轴总成和差速器总成组成,其中电机EM、中间轴总成和差速器总成相互平行轴安装。
电机EM的转子通过电机轴1S1与电机齿轮1G1固定连接,中间轴总成包括中间轴2S2、输入齿轮2G2、电子拨叉机构和输出齿轮2G3,其中输出齿轮2G3与中间轴2S2通过轴承14连接,在动力分离时,两者可相互独立转动。输入齿轮2G2与中间轴2S2固定连接。
电子拨叉机构包括接合花键2B1、接合套2B2和花键毂2B3,其中,接合花键2B1与输出齿轮2G3固定连接,花键毂2B3与中间轴2S2固定连接,接合套2B2安装于花键毂2B3上并能沿轴向移动。
电子拨叉机构还包括安装于接合套2B2上的同步机构。电子拨叉机构还包括与接合套2B2连接的的运动执行机构(本图例未画出)。
输出齿轮2G3与差速器齿轮DG1外啮合。差速器总成由差速器齿轮DG1、差速器DIF、左半轴LHS和右半轴RHS组成,差速器齿轮G8固定安装在差速器DIF,差速器DIF通过左半轴LHS和右半轴RHS输出动力。
本拨叉传动系统的驱动模式是:当此电驱动系统需要驱动汽车行驶时,控制器指示电机EM从车载电源处获得电能并按实际车速匹配转速,随后指示电子拨叉机构中的离合执行机构推动接合套2B2,在同步机构的辅助下,接合套2B2嵌入接合花键2B1,此时接合套2B2将接合花键2B1和花键毂2B3固定连接,即输出齿轮2G3和中间轴2S2固定连接。此时,电机EM输出动力,电机EM将动力经电机轴1S1传递给电机齿轮1G1,电机齿轮1G1将动力传递给输入齿轮2G2,输入齿轮2G2将动力经中间轴2S2传递给输出齿轮2G3,输出齿轮2G3将动力传递给差速器齿轮DG1,差速器齿轮DG1将动力经差速器DIF传递给左半轴S5和右半轴S6输出动力。
当此电驱动系统无需驱动汽车行驶时,控制器指示电机EM关闭动力,同时指示电子拨叉机构中的运动执行机构拨动接合套2B2,使得接合套2B2与接合花键2B1分离,实现电机EM与差速器总成的动力分离。
如图5所示,第二种拨叉传动系统由电机EM、中间轴总成和差速器总成组成,其中电机EM、中间轴总成和差速器总成相互平行轴安装。
电机EM的转子通过电机轴1S1与电机齿轮1G1固定连接,中间轴总成包括中间轴2S2、输入齿轮2G2、电子拨叉机构和输出齿轮2G3,其中输入齿轮2G2与中间轴2S2通过轴承14连接,在动力分离时,两者可相互独立转动。输出齿轮2G3与中间轴2S2固定连接。
电子拨叉机构包括接合花键2B1、接合套2B2和花键毂2B3,其中,接合花键2B1与输出齿轮2G3固定连接,花键毂2B3与中间轴2S2固定连接,接合套2B2安装于花键毂2B3上并能沿轴移动。
电子拨叉机构还包括安装于接合套2B2上的同步机构。电子拨叉机构还包括与接合套2B2连接的的运动执行机构(本图例未画出)。
输出齿轮2G3与差速器齿轮DG1外啮合。差速器总成由差速器齿轮DG1、差速器DIF、左半轴LHS和右半轴RHS组成,差速器齿轮G8固定安装在差速器DIF,差速器DIF通过左半轴LHS和右半轴RHS输出动力。
本拨叉传动系统的驱动模式是:当此电驱动系统需要驱动汽车行驶时,控制器指示电机EM从车载电源处获得电能并按实际车速匹配转速,随后指示电子拨叉机构中的运动执行机构拨动接合套2B2,在同步机构的辅助下,接合套2B2嵌入接合花键2B1,此时接合套2B2将接合花键2B1和花键毂2B3固定连接,即输入齿轮2G2和中间轴2S2固定连接。此时,电机EM输出动力,电机EM将动力经电机轴1S1传递给电机齿轮1G1,电机齿轮1G1将动力传递给输入齿轮2G2,输入齿轮2G2将动力经中间轴2S2传递给输出齿轮2G3,输出齿轮2G3将动力传递给差速器齿轮DG1,差速器齿轮DG1将动力经差速器DIF传递给左半轴S5和右半轴S6输出动力。
当此电驱动系统无需驱动汽车行驶时,控制器指示电机EM关闭动力,同时指示电子拨叉机构中的运动执行机构拨动接合套2B2,使得接合套2B2与接合花键2B1分离,实现电机EM与差速器总成的动力分离。
如图6所示,第一种离合传动系统由电机EM、中间轴总成和差速器总成组成,其中电机EM、中间轴总成和差速器总成相互平行轴安装。
电机EM的转子通过电机轴1S1与电机齿轮1G1固定连接,中间轴总成包括中间轴2S2、中间后轴2S3、输入齿轮2G2、动力离合器2C和输出齿轮2G3,其中输入齿轮2G2与中间轴2S2固定连接,输出齿轮2G3与中间轴2S2固定连接。
动力离合器2C包括动力离合器主动端2C1和动力离合器被动端2C2,其中,动力离合器主动端2C1与中间轴2S2固定连接,动力离合器被动端2C2与中间后轴2S3固定连接。
动力离合器2C在分离时,中间轴2S2和中间后轴2S3可相互独立转动,动力离合器2C结合后,动力离合器主动端2C1和动力离合器被动端2C2固定连接,即中间轴2S2和中间后轴2S3固定连接。
输出齿轮2G3与差速器齿轮DG1外啮合。差速器总成由差速器齿轮DG1、差速器DIF、左半轴LHS和右半轴RHS组成,差速器齿轮G8固定安装在差速器DIF,差速器DIF通过左半轴LHS和右半轴RHS输出动力。
离合传动系统的驱动模式是:当此电驱动系统需要驱动汽车行驶时,控制器指示电机EM从车载电源处获得电能并按实际车速匹配转速,随后指示动力离合器2C结合,动力离合器主动端2C1和动力离合器被动端2C2固定连接,即中间轴2S2和中间后轴2S3固定连接。此时,电机EM输出动力,电机EM将动力经电机轴1S1传递给电机齿轮1G1,电机齿轮1G1将动力传递给输入齿轮2G2,输入齿轮2G2将动力经中间轴2S2传递给结合状态的动力离合器2C,动力离合器2C将动力经中间后轴2S3传递给输出齿轮2G3,输出齿轮2G3将动力传递给差速器齿轮DG1,差速器齿轮DG1将动力经差速器DIF传递给左半轴S5和右半轴S6输出动力。
当此电驱动系统无需驱动汽车行驶时,控制器指示电机EM关闭动力,同时指示动力离合器2C分离,实现电机EM与差速器总成的动力分离。
如图7所示,第二种离合传动系统由电机EM、中间轴总成和差速器总成组成,其中电机EM、中间轴总成和差速器总成相互平行轴安装。
电机EM的转子通过电机轴1S1与电机齿轮1G1固定连接。中间轴总成包括中间轴2S2、输入齿轮2G2、动力离合器2C和输出齿轮2G3,其中输入齿轮2G2与中间轴2S2通过轴承14连接,在动力分离时,两者可相互独立转动。输出齿轮2G3与中间轴2S2固定连接。
动力离合器2C包括动力离合器主动端2C1和动力离合器被动端2C2,其中,动力离合器主动端2C1与输入齿轮2G2固定连接,动力离合器被动端2C2与中间轴2S2固定连接。
动力离合器2C在分离时,中间轴2S2和输入齿轮2G2可相互独立转动,动力离合器2C结合后,动力离合器主动端2C1和动力离合器被动端2C2固定连接,即中间轴2S2和输入齿轮2G2固定连接。
输出齿轮2G3与差速器齿轮DG1外啮合。差速器总成由差速器齿轮DG1、差速器DIF、左半轴LHS和右半轴RHS组成,差速器齿轮G8固定安装在差速器DIF,差速器DIF通过左半轴LHS和右半轴RHS输出动力。
本离合传动系统的驱动模式是:当此电驱动系统需要驱动汽车行驶时,控制器指示电机EM从车载电源处获得电能并按实际车速匹配转速,随后指示动力离合器2C结合,动力离合器主动端2C1和动力离合器被动端2C2固定连接,即中间轴2S与输入齿轮2G2固定连接。此时,电机EM输出动力,电机EM将动力经电机轴1S1传递给电机齿轮1G1,电机齿轮1G1将动力传递给输入齿轮2G2,输入齿轮2G2将动力经结合状态的动力离合器2C传递给中间轴2S2,中间轴2S2将动力传递给输出齿轮2G3,输出齿轮2G3将动力传递给差速器齿轮DG1,差速器齿轮DG1将动力经差速器DIF传递给左半轴S5和右半轴S6输出动力。
当此电驱动系统无需驱动汽车行驶时,控制器指示电机EM关闭动力,同时指示动力离合器2C分离,实现电机EM与差速器总成的动力分离。
以上结合附图对本发明的实施方式作了详细说明,但本发明不限于所描述的实施方式。对于本领域的技术人员而言,在不脱离本发明原理和精神的情况下,对这些实施方式进行多种变化、修改、替换和变型,仍落入本发明的保护范围内。
- 汽车双组动力离合四驱系统
- 集成式双离合双转子电机的混合动力汽车动力驱动系统