一种变量施肥系统及其控制方法
文献发布时间:2023-06-19 10:10:17
技术领域
本发明涉及农业机械技术领域,尤其涉及一种变量施肥系统及其控制方法。
背景技术
水稻是我国乃至全世界主要粮食作物之一,据2018年国家数据显示我国水稻种植面积达3.019khm
在国内外,有大量对变量施肥技术的研究,通过变量施肥技术能在减少施肥总量的前提下使产量得以最大化,但针对水稻施肥技术研究甚少。目前的水稻施肥技术主要采用侧深施肥技术,但水稻侧深施肥技术解决了肥料表施的问题,但只能进行均匀的条状施肥,无法进行变量施肥,不能进一步提高肥料利用率。
发明内容
本发明实施例提供一种变量施肥系统及其控制方法,旨在用于水稻的变量施肥,以提高肥料利用率。
本发明实施例提供一种变量施肥系统,包括牵引装置、施肥装置、深度传感器、土壤电导率传感器和控制装置;
所述施肥装置设置于所述牵引装置;
所述深度传感器用于采集施肥深度;
所述土壤电导率传感器用于采集土壤电导率;
所述控制装置电性连接所述施肥装置、所述深度传感器和所述土壤电导率传感器,所述控制装置用于根据所述深度传感器和所述土壤电导率传感器驱动所述施肥装置。
根据本发明一个实施例的变量施肥系统,所述深度传感器设置于所述施肥装置;和/或,
所述深度传感器为超声波传感器。
根据本发明一个实施例的变量施肥系统,所述土壤电导率传感器设置于所述牵引装置的底部。
根据本发明一个实施例的变量施肥系统,所述施肥装置和所述土壤电导率传感器均设置于所述牵引装置的后端,所述土壤电导率传感器位于所述施肥装置的排肥口的下前方。
根据本发明一个实施例的变量施肥系统,所述控制装置包括电性相连的数据采集模块、数据处理模块、串口通信模块和施肥控制器;
所述数据采集模块电性连接所述施肥装置和所述深度传感器;
所述施肥控制器电性连接所述施肥装置。
根据本发明一个实施例的变量施肥系统,所述牵引装置为插秧机。
根据本发明一个实施例的变量施肥系统,所述变量施肥系统还包括定位装置,所述定位装置电性连接所述控制装置。
根据本发明一个实施例的变量施肥系统,所述定位装置设置于所述牵引装置的前端顶部。
根据本发明一个实施例的变量施肥系统,所述变量施肥系统还包括车载显示终端,所述车载显示终端电性连接所述控制装置。
根据本发明一个实施例的变量施肥系统,所述变量施肥系统还包括电源,所述电源电性连接所述控制装置。
本发明实施例还提供一种变量施肥系统的控制方法,包括:
获取施肥深度和土壤电导率;
根据所述施肥深度和所述土壤电导率确定目标施肥量;
根据所述目标施肥量驱动施肥装置进行施肥。
根据本发明一个实施例的变量施肥系统的控制方法,所述根据所述施肥深度和所述土壤电导率确定目标施肥量,包括:
若所述施肥深度大于施肥深度阀值,则确定目标施肥量为第一施肥量;
若所述施肥深度小于所述施肥深度阀值,则根据所述土壤电导率确定所述目标施肥量。
根据本发明一个实施例的变量施肥系统的控制方法,所述若所述施肥深度小于所述施肥深度阀值,则根据所述土壤电导率确定所述目标施肥量,包括:
若所述土壤电导率大于第一电导率阀值,则确定所述目标施肥量为第二施肥量,其中,所述第二施肥量大于所述第一施肥量;
若所述土壤电导率小于所述第一电导率阀值且大于第二电导率阀值,则确定所述目标施肥量为第三施肥量,其中,所述第二电导率阀值小于所述第一电导率阀值,所述第三施肥量大于所述第二施肥量;
若所述土壤电导率小于第二电导率阀值,则确定所述目标施肥量为第四施肥量,其中,所述第四施肥量大于所述第三施肥量。
根据本发明一个实施例的变量施肥系统的控制方法,所述根据所述施肥深度和所述土壤电导率确定目标施肥量,包括:
根据所述施肥深度和所述土壤电导率得到施肥量等级,其中,所述施肥量等级设置有多个,不同的施肥量等级对应不同的施肥量;
根据得到的施肥量等级确定目标施肥量。
本发明实施例提供的变量施肥系统及其控制方法,可以根据施肥深度和土壤电导率完成变量施肥作业,与常规侧深施肥相比可有效减少肥料施用量,也能够满足实际生产需要,从而提高了肥料利用率。
附图说明
为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作一简单地介绍,显而易见地,下面描述中的附图是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
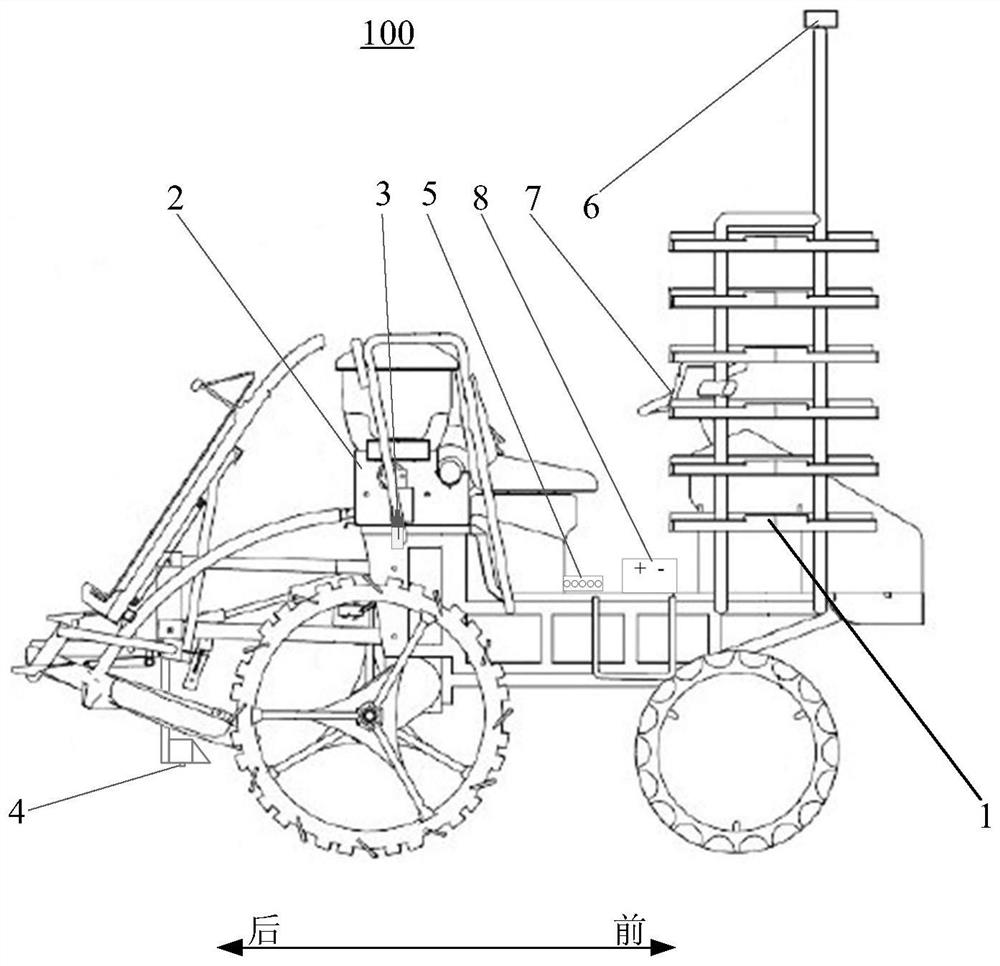
图1是本发明实施例提供的一种变量施肥系统的结构示意图;
图2是本发明实施例提供的一种变量施肥系统的控制方法的流程示意图;
图3是本发明实施例提供的又一种变量施肥系统的控制方法的流程示意图。
附图标记:
100:变量施肥系统;1:牵引装置;2:施肥装置;3:深度传感器;4:土壤电导率传感器;5:数据采集模块;6:定位装置;7:车载显示终端;8:电源。
具体实施方式
为使本发明实施例的目的、技术方案和优点更加清楚,下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
本发明实施例提供了一种变量施肥系统,能用于水稻的侧深变量施肥,如图1所示,该变量施肥系统100包括牵引装置1、施肥装置2、深度传感器3、土壤电导率传感器4和控制装置。
如图1所示,施肥装置2设置于牵引装置1。其中,牵引装置1可以为插秧机等,施肥装置2通常设置于牵引装置1的后端。在本实施例中,施肥装置2为风送式排肥装置,风送式排肥装置包括排肥驱动电机、鼓风机和排肥器等,驱动排肥驱动电机,通过排肥器能把肥料排出。
如图1所示,深度传感器3用于采集施肥深度。其中,深度传感器3可以为超声波传感器等,并且,深度传感器3可以是设置于牵引装置1或者施肥装置2等装置。
如图1所示,土壤电导率传感器4用于采集土壤电导率。其中,土壤电导率传感器4通常是设置于牵引装置1的底部,并且,土壤电导率传感器4也设置于牵引装置1的后端,土壤电导率传感器4位于施肥装置2的排肥口的下前方。
控制装置电性连接施肥装置2、深度传感器3和土壤电导率传感器4,控制装置用于根据深度传感器3和土壤电导率传感器4驱动施肥装置2。深度传感器3能测量施肥装置2的施肥深度,因为深施肥有利于吸收,故相对于浅施肥可相对减少施肥量;土壤电导率传感器4能测量土壤电导率,而土壤电导率能作为土壤肥力的判定指标,通常情况下,高肥田的土壤电导率高,低肥田的土壤电导率低。深度传感器3和土壤电导率传感器4分别采集施肥深度和土壤电导率并发送至控制装置后,控制装置能根据施肥深度和土壤电导率控制施肥装置2进行变量排肥。具体地,在本实施例中,控制装置包括电性相连的数据采集模块5、数据处理模块、串口通信模块和施肥控制器;数据采集模块5电性连接施肥装置2和深度传感器3;施肥控制器电性连接施肥装置2。深度传感器3和土壤电导率传感器4能够获取施肥深度信息和土壤肥力信息,数据采集模块5能将采集到的传感器信息发送至数据处理模块进行解析处理,以得到施肥决策信息,数据处理模块将施肥决策信息发送至施肥控制器,施肥控制器根据施肥决策信息驱动排肥电机,以通过排肥器把肥料排出,其中,控制装置可采用STM32,利用STM32实现数据采集、处理与通信。
如图1所示,在本实施例中,变量施肥系统100还包括定位装置6,定位装置6电性连接控制装置,通过定位装置6能获取牵引装置1的位置和车速,通过控制车速和排肥电机转速能完成变量施肥。其中,定位装置6可以为GPS装置等,定位装置6通常设置于牵引装置1的前端顶部。
如图1所示,在本实施例中,变量施肥系统100还包括车载显示终端7,车载显示终端7电性连接控制装置。最后把施肥等级、车速、位置以及传感器测量值等实时显示在车载显示终端7上。
如图1所示,在本实施例中,变量施肥系统100还包括电源8,电源8电性连接控制装置。电源8能为变量施肥系统100供电,在本实施例中,电源8为12V电源,电源8设置于牵引装置1。
如图2所示,图2是本发明实施例提供的一种变量施肥系统的控制方法,该控制方法可以基于如上所示的变量施肥系统来实现,该控制方法包括但不限于如下步骤:
S210:获取施肥深度和土壤电导率。
具体的说,通过变量施肥系统上的多种传感器能实时或者周期性地采集对应的信息数据,采集到的信息数据中包含施肥深度FD和土壤电导率SEC,其中,变量施肥系统是通过深度传感器和土壤电导率传感器来分别采集施肥深度FD和土壤电导率SEC。
S220:根据施肥深度和土壤电导率确定目标施肥量。
具体的说,由于深施肥有利于吸收,相对于浅施肥可相对减少施肥量,并且,土壤电导率能作为土壤肥力的判定指标,通常情况下,高肥田的土壤电导率高,低肥田的土壤电导率低,故根据施肥深度FD和土壤电导率SEC来变化施肥量,能在满足实际生产需要的前提下,有效减少肥料施用量。
可选的,控制装置根据施肥深度和土壤电导率确定目标施肥量可以通过如下步骤来实现:若施肥深度大于施肥深度阀值,则控制装置确定目标施肥量为第一施肥量;若施肥深度小于施肥深度阀值,则控制装置根据土壤电导率确定目标施肥量。
具体的说,施肥深度阀值X
而控制装置根据土壤电导率确定目标施肥量可以通过如下步骤来实现:若土壤电导率大于第一电导率阀值,则确定目标施肥量为第二施肥量;若土壤电导率小于第一电导率阀值且大于第二电导率阀值,则确定目标施肥量为第三施肥量;若土壤电导率小于第二电导率阀值,则确定目标施肥量为第四施肥量。
具体的说,第二电导率阀值X
可选的,控制装置根据施肥深度和土壤电导率确定目标施肥量可以通过如下步骤来实现:根据施肥深度和土壤电导率得到施肥量等级;根据得到的施肥量等级确定目标施肥量。
具体的说,施肥量等级设置有多个,不同的施肥量等级对应不同的施肥量,例如,根据施肥深度和土壤电导率,把稻田拟分为四个区,该四个区分别为深施肥区、高肥力区、中肥力区和低肥力区,再把施肥量拟分为四个等级“1”、“2”、“3”和“4”,等级“1”对应深施肥区和第一施肥量,等级“2”对应高肥力区和第二施肥量,等级“3”对应中肥力区和第三施肥量,等级“4”对应低肥力区和第四施肥量。
如图3所示,图3是本发明实施例提供的一种变量施肥系统的控制方法,该控制方法可以基于如上所示的变量施肥系统来实现,该控制方法包括但不限于如下步骤:
步骤S301:获取传感器信号。
具体的说,通过变量施肥系统上的多种传感器能实时或者周期性地采集对应的信息数据,其中,获取到的传感器信号包括施肥深度和土壤电导率。
步骤S302:采集数据。
具体的说,控制装置可以实时或者周期性地采集数据。其中,采集到的数据包括施肥深度FD和土壤电导率SEC。
步骤S303:数据滤波。
可选的,变量施肥系统的程序采用的是C语言和VC++语言进行编写,C语言编程部分主要实现了水稻变量施肥作业时施肥深度和土壤肥力信息接收、滤波等功能。控制装置可以对传感器的信息进行均值滤波,控制装置也可以对传感器和GPS信息进行解析。
步骤S304:变量施肥策略。
步骤S305:确定施肥等级。
步骤S306:设定目标施肥量。
步骤S307:目标施肥量是否改变,若改变,则执行步骤S308;若没改变执行步骤S309。
步骤S308:更新目标施肥量。
步骤S309:解析GPS信息。
步骤S310:计算排肥电机转速。
步骤S311:完成排肥。
具体地说,采集的传感器信号经过数据滤波,然后通过变量施肥策略处理,确认施肥等级,然后设定施肥量,最后通过车速和排肥电机转速完成变量施肥。可选的,施肥策略为根据施肥深度和土壤电导率,把稻田拟分为四个区,该四个区分别为深施肥区、高肥力区、中肥力区和低肥力区,再把施肥量拟分为四个等级“1”、“2”、“3”和“4”,等级“1”对应深施肥区和第一施肥量,等级“2”对应高肥力区和第二施肥量,等级“3”对应中肥力区和第三施肥量,等级“4”对应低肥力区和第四施肥量。
可选的,本发明实施例还提供的一种变量施肥系统的控制方法,该控制方法可以基于如上所示的变量施肥系统来实现,该控制方法包括但不限于如下步骤:
步骤S401:获取传感器信号。
步骤S402:计算施肥深度FD和土壤电导率SEC。
步骤S403:确定施肥深度阀值X
步骤S404:确定施肥深度FD是否小于施肥深度阀值X
步骤S405:判定为深施肥区,输出决策信息“1”,施肥量减少23%。
步骤S406:确定土壤电导率SEC是否小于第一电导率阀值X
步骤S407:判定为高肥力区,输出决策信息“2”,施肥量减少15%。
步骤S408:确定土壤电导率SEC是否小于第二电导率阀值X
步骤S409:判定为中肥力区,输出决策信息“3”,施肥量减少5%。
步骤S410:判定为低肥力区,输出决策信息“4”,正常施肥量。
本发明实施例提供的变量施肥系统及其控制方法,可以根据施肥深度和土壤电导率完成变量施肥作业,与常规侧深施肥相比可有效减少肥料施用量,也能够满足实际生产需要,从而提高了肥料利用率。
最后应说明的是:以上实施例仅用以说明本发明的技术方案,而非对其限制;尽管参照前述实施例对本发明进行了详细的说明,本领域的普通技术人员应当理解:其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分技术特征进行等同替换;而这些修改或者替换,并不使相应技术方案的本质脱离本发明各实施例技术方案的精神和范围。
- 一种变量施肥系统及其控制方法
- 一种变量施肥系统及其控制方法