一种精密差速循环轨道结构
文献发布时间:2023-06-19 10:13:22
技术领域
本发明涉及循环轨道的技术领域,具体为一种精密差速循环轨道结构。
背景技术
为了实现载具回流功能,现有的技术其一般为链板线或循环轨道,上述两种轨道结构、其均需要在整个闭合的输送线上均匀排布载具,使得载具的利用率相对低下,且链板线的定位精度低、不适用于精密的组装线体。
发明内容
针对上述问题,本发明提供了一种精密差速循环轨道结构,其使得载具的利用率高,且结构简单、定位精度高,适用于精密的组装线体。
一种精密差速循环轨道结构,其特征在于:其包括分列两侧平行布置的同步输送带、具体为第一同步输送带、第二同步输送带,所述第一同步输送带、第二同步输送带为相同的内外双齿同步输送带,所述第一同步输送带沿着输送方向顺次等间隔设置第1工位、第2工位、……、第N工位,其中N为大于等于3的自然数,N的数值根据产线的工位数量具体设定,所述第一同步输送带、第二同步输送带的框架通过底板连接成为一体,所述第一同步输送带的相对内侧对应于所述第2工位至第(N-1)工位的位置处设置有第一精密滑台轨道,所述第二同步输送带的相对内侧对应于所述第2工位至第(N-1)工位的位置处设置有第二精密滑台轨道,所述第一精密滑台轨道、第二精密滑台轨道长度相同、且平行等高布置,所述第一精密滑台轨道平行于第一同步输送带布置,所述第1工位的对应于第一同步输送带、第二同步输送带的横向区域设置第一气动滑台,所述第一气动滑台上设置有第一辅助滑台轨道,所述第一气动滑台驱动第一辅助滑台轨道横向沿着第一同步输送带、第二同步输送带对应于第1工位的位置移动,所述第N工位的对应于第一同步输送带、第二同步输送带的横向区域设置第二气动滑台,所述第二气动滑台上设置有第二辅助滑台轨道,所述第二气动滑台驱动第二辅助滑台轨道横向沿着第一同步输送带、第二同步输送带对应于第N工位的位置移动,所述第一辅助滑台轨道在停止状态下对位于第一精密滑台轨道或第二精密滑台轨道的对应端布置,所述第二辅助滑台轨道在停止状态下对位于第一精密滑台轨道或第二精密滑台轨道的对应端布置,所述第一同步输送带连接第一驱动电机,所述第一驱动电机驱动第一同步输送带,所述第二同步输送带连接第二驱动电机,所述第二驱动电机驱动第二同步输送带;对应的载具的两侧边底部均设置有仿形于第一同步输送带、第二同步输送带的输送齿的啮合齿槽,两侧的啮合齿槽之间的中心平面用于支承第一精密滑台轨道、第二精密滑台轨道、第一辅助滑台轨道或第二辅助滑台轨道。
其进一步特征在于:
所述第一同步输送带、第二同步输送带的各自框架之间对应于所述第2工位至第(N-1)工位的位置分别设置有对应组连接导杆,每组连接导杆上设置有精准定位凸件,所述精准定位凸件的底座固连有独立的对位气缸的输出端,每个对位气缸分别固设于第一同步输送带所对应的框架内壁对应位置,所述载具的朝向两侧分别设置有内凹缺口槽,精准定位凸件在对位气缸的驱动下插装入内凹缺口槽内、确保工件在对应的工位的位置稳定可靠;
所述第一同步输送带、第二同步输送带的输送上表面的相对于第1工位的后端设置有第一横向档杆,所述第一同步输送带、第二同步输送带的输送上表面的相对于第N工位的前端设置有第二横向档杆,确保载具不会脱轨。
采用本发明后,第一同步输送带的步进距离为A,则每个工位的间隔为A,第一输送带的总有效输送长度为N*A,而第二同步输送带的步进距离为N*A/2,两个独立的驱动电机为循环轨道提供不同速度要求,第N工位上的载具被第二气动滑台驱动向第二同步输送带,第一同步输送带带动每个除去第N工位上的每个载具步进前进,第二同步输送带将处于中部位置的待用载具送入对应于第1工位的位置,第一启动滑台将处于第1工位上的第二同步输送带上的载具输送至第一同步输送带的第1工位位置,在第二同步输送带上仅需布置少量的中转载具即可,且因为动力的提供是同步带与载具间是采用齿形咬合来完成,没有固定件机构限制,所以当需要增加或者介绍载具的数量,可直接添加,再更改配速即可;其使得载具的利用率高,且结构简单、定位精度高,适用于精密的组装线体。
附图说明
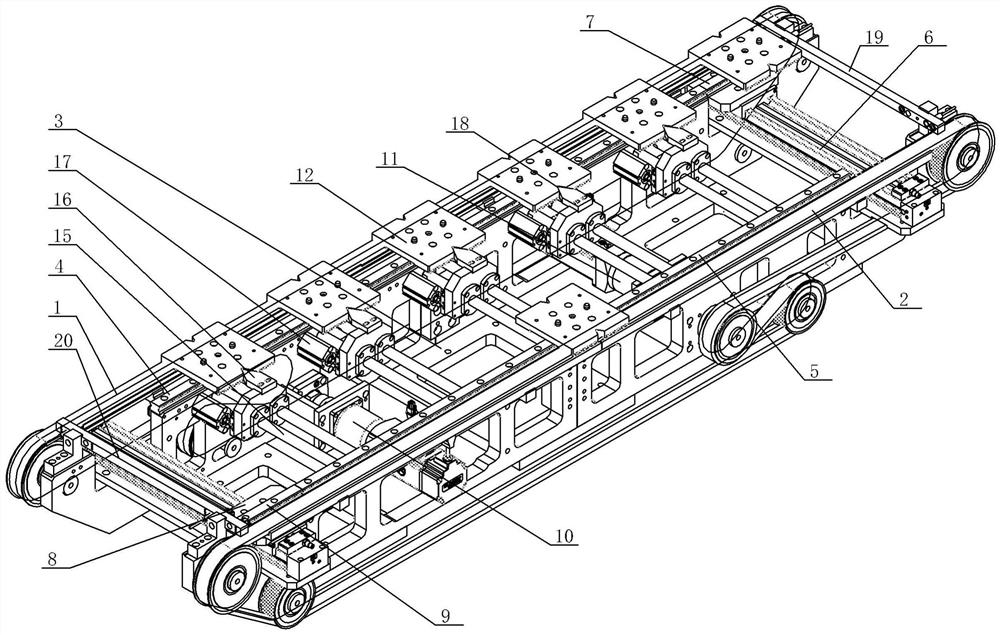
图1为本发明的立体图结构示意图;
图2为本发明的俯视图结构示意图;
图3为载具的仰视图结构示意图;
图中序号所对应的名称如下:
第一同步输送带1、第二同步输送带2、底板3、第一精密滑台轨道4、第二精密滑台轨道5、第一气动滑台6、第一辅助滑台轨道7、第二气动滑台8、第二辅助滑台轨道9、第一驱动电机10、第二驱动电机11、载具12、啮合齿槽13、中心平面14、连接导杆15、精准定位凸件16、对位气缸17、内凹缺口槽18、第一横向档杆19、第二横向档杆20。
具体实施方式
一种精密差速循环轨道结构,见图1-图3:其包括分列两侧平行布置的同步输送带、具体为第一同步输送带1、第二同步输送带2,第一同步输送带1、第二同步输送带2为相同的内外双齿同步输送带,第一同步输送带1沿着输送方向顺次等间隔设置第1工位、第2工位、……、第N工位,其中N为大于等于3的自然数,N的数值根据产线的工位数量具体设定,第一同步输送带1、第二同步输送带2的框架通过底板3连接成为一体,第一同步输送带1的相对内侧对应于第2工位至第(N-1)工位的位置处设置有第一精密滑台轨道4,第二同步输送带2的相对内侧对应于第2工位至第(N-1)工位的位置处设置有第二精密滑台轨道5,第一精密滑台轨道4、第二精密滑台轨道5长度相同、且平行等高布置,第一精密滑台轨道4平行于第一同步输送带1布置,第1工位的对应于第一同步输送带1、第二同步输送带2的横向区域设置第一气动滑台6,第一气动滑台6上设置有第一辅助滑台轨道7,第一气动滑台6驱动第一辅助滑台轨道7横向沿着第一同步输送带1、第二同步输送2带对应于第1工位的位置移动,第N工位的对应于第一同步输送带1、第二同步输送带2的横向区域设置第二气动滑台8,第二气动滑台8上设置有第二辅助滑台轨道9,第二气动滑台8驱动第二辅助滑台轨道9横向沿着第一同步输送带1、第二同步输送2带对应于第N工位的位置移动,第一辅助滑台轨道7在停止状态下对位于第一精密滑台轨道4或第二精密滑台轨道5的对应端布置,第二辅助滑台轨道9在停止状态下对位于第一精密滑台轨道4或第二精密滑台轨道5的对应端布置,第一同步输送带1连接第一驱动电机10,第一驱动电机10驱动第一同步输送带1,第二同步输送带2连接第二驱动电机11,第二驱动电机11驱动第二同步输送带2;对应的载具12的两侧边底部均设置有仿形于第一同步输送带1、第二同步输送带2的输送齿的啮合齿槽13,两侧的啮合齿槽13之间的中心平面14用于支承第一精密滑台轨道4、第二精密滑台轨道5、第一辅助滑台轨道7或第二辅助滑台轨道9。
第一同步输送带1、第二同步输送2带的各自框架之间对应于第2工位至第(N-1)工位的位置分别设置有对应组连接导杆15,每组连接导杆15上设置有精准定位凸件16,精准定位凸件16的底座固连有独立的对位气缸17的输出端,每个对位气缸17分别固设于第一同步输送带1所对应的框架内壁对应位置,载具12的朝向两侧分别设置有内凹缺口槽18,精准定位凸件16在对位气缸17的驱动下插装入内凹缺口槽18内、确保工件在对应的工位的位置稳定可靠;
第一同步输送带1、第二同步输送带2的输送上表面的相对于第1工位的后端设置有第一横向档杆19,第一同步输送带1、第二同步输送带2的输送上表面的相对于第N工位的前端设置有第二横向档杆20,确保载具不会脱轨。
其工作原理如下:第一同步输送带的步进距离为A,则每个工位的间隔为A,第一输送带的总有效输送长度为N*A,而第二同步输送带的步进距离为N*A/2,两个独立的驱动电机为循环轨道提供不同速度要求,第N工位上的载具被第二气动滑台驱动向第二同步输送带,第一同步输送带带动每个除去第N工位上的每个载具步进前进,第二同步输送带将处于中部位置的待用载具送入对应于第1工位的位置,第一启动滑台将处于第1工位上的第二同步输送带上的载具输送至第一同步输送带的第1工位位置,在第二同步输送带上仅需布置少量的中转载具即可。
具体实施例中,N的取值为6,第二同步输送带的伺服电机每次移动660mm,即可将载具由最右端移动至中间位置,第一同步输送带的伺服电机每次移动220mm,即每个工位间移动。两套动力为循环轨道提供不同速度要求。
第一同步输送带、第二同步输送带均采用双面齿同步带,载具底面前后两侧都有仿型的啮合齿槽,在前后移动到位后,啮合齿槽自动与同步带上齿形咬合,因为动力的提供是同步带与载具间是采用齿形咬合来完成,没有固定件机构限制,所以当需要增加或者介绍载具的数量,可直接添加,再更改配速即可;其使得载具的利用率高,且结构简单、定位精度高,适用于精密的组装线体。
对于本领域技术人员而言,显然本发明不限于上述示范性实施例的细节,而且在不背离本发明的精神或基本特征的情况下,能够以其他的具体形式实现本发明。因此,无论从哪一点来看,均应将实施例看作是示范性的,而且是非限制性的,本发明的范围由所附权利要求而不是上述说明限定,因此旨在将落在权利要求的等同要件的含义和范围内的所有变化囊括在本发明内。不应将权利要求中的任何附图标记视为限制所涉及的权利要求。
此外,应当理解,虽然本说明书按照实施方式加以描述,但并非每个实施方式仅包含一个独立的技术方案,说明书的这种叙述方式仅仅是为清楚起见,本领域技术人员应当将说明书作为一个整体,各实施例中的技术方案也可以经适当组合,形成本领域技术人员可以理解的其他实施方式。
- 一种精密差速循环轨道结构
- 一种用于热循环试验设备的地面精密可调轨道结构