一种具有夹紧拉拔功能的微操作装置及方法
文献发布时间:2023-06-19 10:13:22
技术领域
本发明属于夹持器领域,尤其是一种具有夹紧拉拔功能的微操作装置及方法。
背景技术
夹持器是握住物体进而操控物体的设备,它能够在执行某些动作的同时夹住和松开物体,运动设备往往模仿人体的运动,就夹持器而言,模仿的是手指的运动,“手指”本身并不属于夹持器,它们只是用于夹持物体的专用定制工具,称为“夹片,而目前夹持器只提高夹持功能,不具备夹持-拉拔功能,而且不方便对压电陶瓷驱动器进行更换,因此,有必要提供一种具有夹紧拉拔功能的微操作装置及方法解决上述技术问题。
发明内容
发明目的:针对现有技术中的问题,本发明提供了一种具有夹紧拉拔功能的微操作装置及方法。
技术方案:一种具有夹紧拉拔功能的微操作装置,包括柔性铰链机械臂,所述柔性铰链机械臂顶部的左右两侧均固定连接有夹持臂,所述柔性铰链机械臂腔体的顶部开设有凹槽,所述凹槽的内腔卡接有定位块,所述定位块的底部固定连接有压电陶瓷驱动器,所述凹槽内腔的左右两侧均开设有限位槽,所述定位块内腔的左右两侧均滑动连接有滑板,两个所述滑板相对的一侧固定连接有压簧,所述滑板远离压簧的一端固定连接有销柱,所述销柱远离滑板的一端贯穿定位块且延伸至限位槽的内腔,所述柔性铰链机械臂的表面螺纹连接有预紧螺栓,所述预紧螺栓的顶部贯穿柔性铰链机械臂且与压电陶瓷驱动器的连接处紧密贴合。
优选的,所述定位块内腔顶部和底部的左右两侧均开设有与滑板配合使用的滑槽,所述滑板的外表面与滑槽的内表面滑动连接。
优选的,所述柔性铰链机械臂正面的左右两侧并位于压电陶瓷驱动器的上方均开设有螺栓孔。
优选的,所述柔性铰链机械臂正面左右两侧的底部均开设有辅助铰链。
一种具有夹紧拉拔功能的微操作装置的操作方法,具体步骤包括:
S1:将压电陶瓷驱动器和定位块固定连接,然后移动压电陶瓷驱动器,使压电陶瓷驱动器带动定位块插入凹槽的内腔,与此同时,凹槽的内表面挤压两侧的销柱,使两侧销柱带动滑板在滑槽的内表面滑动挤压压簧,从而使销柱进入定位块的内腔,当压电陶瓷驱动器带动定位块移动到指定位置时,销柱移动到与限位槽对应的位置,同时压簧在反作用力下推动滑板在滑槽的内表面滑动,使滑板带动销柱移动,从而使销柱插入限位槽的内腔,使得限位槽对销柱进行固定;
S2:当需要拆卸压电陶瓷驱动器时,反之上述操作即可,从而方便对压电陶瓷驱动器进行更换;
S3:通过螺栓孔,将该装置与外接微动机构连接,然后通过预紧螺栓,将压电陶瓷驱动器在腔体内预紧;
S4:然后将压电陶瓷驱动器插头通电,启动压电陶瓷驱动器外部控制器,使压电陶瓷驱动器在电压作用下伸长,在桥式放大机构中两侧的辅助铰链向内侧拉动夹持臂,同时压电陶瓷驱动器的轴向运动,通过辅助铰链带动夹持臂随着压电陶瓷驱动器一同运动,由此实现具有夹持-拉拔功能,通过一个压电陶瓷驱动器实现夹紧-拉拔功能,便于将微纳米尺度的物体从基地材料上拉拔出来,且结构紧凑,成本低,控制简单。
本发明的有益效果:
(1)本发明所述的一种具有夹紧拉拔功能的微操作装置及方法,通过凹槽、定位块、限位槽、滑板、压簧和销柱,能够方便对压电陶瓷驱动器进行固定,通过设置柔性铰链机械臂、夹持臂、压电陶瓷驱动器和预紧螺栓,能够具备夹紧-拉拔功能,通过设置以上结构,方便对压电陶瓷驱动器进行更换同时具备夹紧-拉拔功能;
(2)本发明所述的一种具有夹紧拉拔功能的微操作装置及方法,通过设置滑槽,能够方便对滑板进行支撑,同时对其进行限位,通过设置螺栓孔,能够方便对该装置进行固定,通过设置辅助铰链,能够方便该装置使用。
附图说明
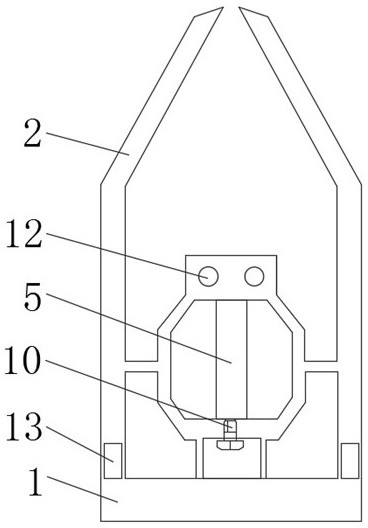
图1为本发明提出的一种具有夹紧拉拔功能的微操作装置的整体示意图;
图2是图1所示的柔性铰链机械臂结构剖视图;
图3是图2所示的定位块结构剖视图;
图4是图1所示的柔性铰链机械臂和辅助铰链结构连接立体图。
附图标记为:1、柔性铰链机械臂;2、夹持臂;3、凹槽;4、定位块;5、压电陶瓷驱动器;6、限位槽;7、滑板;8、压簧;9、销柱;10、预紧螺栓;11、滑槽;12、螺栓孔;13、辅助铰链。
具体实施方式
为了使本发明实现的技术手段、创作特征、达成目的与功效易于明白了解,下面结合具体实施方式,进一步阐述本发明。
如图1-图4所示,本发明的一种具有夹紧拉拔功能的微操作装置,包括柔性铰链机械臂1,柔性铰链机械臂1顶部的左右两侧均固定连接有夹持臂2,柔性铰链机械臂1腔体的顶部开设有凹槽3,凹槽3的内腔卡接有定位块4,定位块4的底部固定连接有压电陶瓷驱动器5,凹槽3内腔的左右两侧均开设有限位槽6,定位块4内腔的左右两侧均滑动连接有滑板7,两个滑板7相对的一侧固定连接有压簧8,滑板7远离压簧8的一端固定连接有销柱9,销柱9远离滑板7的一端贯穿定位块4且延伸至限位槽6的内腔,柔性铰链机械臂1的表面螺纹连接有预紧螺栓10,预紧螺栓10的顶部贯穿柔性铰链机械臂1且与压电陶瓷驱动器5的连接处紧密贴合。
具体的,定位块4内腔顶部和底部的左右两侧均开设有与滑板7配合使用的滑槽11,滑板7的外表面与滑槽11的内表面滑动连接。
具体的,柔性铰链机械臂1正面的左右两侧并位于压电陶瓷驱动器5的上方均开设有螺栓孔12。
具体的,柔性铰链机械臂1正面左右两侧的底部均开设有辅助铰链13。
一种具有夹紧拉拔功能的微操作装置的操作方法,具体步骤包括:
S1:将压电陶瓷驱动器5和定位块4固定连接,然后移动压电陶瓷驱动器5,使压电陶瓷驱动器5带动定位块4插入凹槽3的内腔,与此同时,凹槽3的内表面挤压两侧的销柱9,使两侧销柱9带动滑板7在滑槽11的内表面滑动挤压压簧8,从而使销柱9进入定位块4的内腔,当压电陶瓷驱动器5带动定位块4移动到指定位置时,销柱9移动到与限位槽6对应的位置,同时压簧8在反作用力下推动滑板7在滑槽11的内表面滑动,使滑板7带动销柱9移动,从而使销柱9插入限位槽6的内腔,使得限位槽6对销柱9进行固定;
S2:当需要拆卸压电陶瓷驱动器5时,反之上述操作即可,从而方便对压电陶瓷驱动器5进行更换;
S3:通过螺栓孔12,将该装置与外接微动机构连接,然后通过预紧螺栓10,将压电陶瓷驱动器5在腔体内预紧;
S4:然后将压电陶瓷驱动器5插头通电,启动压电陶瓷驱动器5外部控制器,使压电陶瓷驱动器5在电压作用下伸长,在桥式放大机构中两侧的辅助铰链13向内侧拉动夹持臂2,同时压电陶瓷驱动器5的轴向运动,通过辅助铰链13带动夹持臂2随着压电陶瓷驱动器5一同运动,由此实现具有夹持-拉拔功能,通过一个压电陶瓷驱动器5实现夹紧-拉拔功能,便于将微纳米尺度的物体从基地材料上拉拔出来,且结构紧凑,成本低,控制简单。
以上结合附图详细描述了本发明的优选实施方式,但是,本发明并不限于上述实施方式中的具体细节,在本发明的技术构思范围内,可以对本发明的技术方案进行多种等同变换,这些等同变换均属于本发明的保护范围。
- 一种具有夹紧拉拔功能的微操作装置及方法
- 一种具有夹紧拉拔功能的双驱动微纳操作装置及方法