用于认知功能的网络状态的环境建模和抽象
文献发布时间:2023-06-19 10:18:07
技术领域
一些实施例涉及用于认知功能的网络状态的环境建模和抽象。特别地,一些实施例涉及5G(无线电接入)网络和其他(未来的)各代无线/移动网络中的认知网络管理(CNM)。
背景技术
CNM的概念已经在多个出版物[1、2、3]中得到了改进,这些出版物建议将SON功能替换为认知功能(CF),CF基于其对网络的动作、其观察到或测量到的影响并且使用各种数据(例如,网络规划、配置、性能和质量、故障或用户/服务相关数据)来学习最佳行为。
引文列表
[1]S.Mwanje et al.,"Network Management Automation in 5G:Challengesand Opportunities,"in Proc.of the 27th IEEE International Symposium onPersonal,Indoor and Mobile Radio Communications(PIMRC),Valenica,Spain,September 4-7,2016
[2]Stephen S Mwanje,Lars Christoph Schmelz,Andreas Mitschele-Thiel,"Cognitive Cellular Networks:A Q-Learning Framework for Self-OrganizingNetworks",IEEE Transactions on Network and Service Management,Vol 13,Issue 1,Pages 85-98,2016/3
[3]PCT/IB2016/055288,"Method and Apparatus for Providing CognitiveFunctions and Facilitating management in Cognitive Network ManagementSystems"filed September 02,2016
[4]FastICA online at http://research.ics.aalto.fi/ica/fastica/
[5]A.
[6]T.Kohonen,M.R.Schroeder,and T.S.Huang(Eds.).Self-Organizing Maps(3rd ed.).Springer-Verlag New York,Inc.,Secaucus,NJ,USA.2001.
[7]Makhzani,Alireza and Brendan J.Frey."k-Sparse Autoencoders."CoRRabs/1312.5663(2013):n.pag.
[8]Sepp Hochreiter and Jürgen Schmidhuber.1997.Long Short-TermMemory.Neural Comput.9,8(November 1997),1735-1780.
[9]Melanie Mitchell.1998.An Introduction to Genetic Algorithms.MITPress,Cambridge,MA,USA.
[10]Márton Kajó,Benedek Schultz,Janne Ali-Tolppa,Georg Carle,"Equal-Volume Quantization of Mobile Network Data Using Bounding Spheres and Boxes",IEEE/IFIP Network Operations and Management Symposium,Taipei,Taiwan April2018
缩略语列表
5G 第五代
CE 协调引擎
CF 认知功能
CME 配置管理引擎
CNM 认知网络管理
DAE 决策动作引擎
EMA 环境建模和抽象
KPI 关键性能指标
NCP 网络配置参数
NM 网络管理
OAM 操作、维护和管理
SON 自组织网络
发明内容
随着自组织网络(SON)的成功,以及其对变化且复杂的环境的灵活性和适应性方面的缺点,对于向网络添加更智能的操作、维护和管理(OAM)功能存在强烈的需求。因此,CNM的目标是OAM功能应当能够:1)学习其正在操作的环境,2)学习适合该特定环境的最佳行为,3)从其经验以及相同或不同OAM功能的其他实例的经验中学习,以及4)学习实现由网络操作者定义的更高级别的目的和目标。该学习应当基于网络中可用的一种或多种或所有类型的数据(包括,例如,性能信息、故障、配置数据、网络规划数据、或用户和服务相关数据)并且根据OAM功能本身的动作和对应影响。学习和从所学习的信息中积累的知识因此应当增加OAM功能的自主性。
实际上,CNM将SON扩展为:1)从多个数据源推断更高级别的网络和环境状态,而不是从KPI值中恢复当前的低级别的基本状态,2)取决于先前动作和操作者目标而允许自适应地选择和改变NCP(网络配置参数)。第一目标(对状态的建模)对于CNM的操作至关重要,因为CF有望响应于网络的特定状态。因此,CNM需要将观察到的KPI抽象为CF对其进行响应的状态的模块。此外,抽象必须在一个或多个网络元素、域或者甚至子网中的多个CF之间保持一致。并且,即使在单个CNM实例中,多个模块也需要协同工作(例如,配置引擎和协调引擎)以使系统最终学习最佳网络配置。这些模块在协调它们的响应时应当或必须参考相似或相同的抽象状态,因此它们(可能)需要单独的模块来定义这些状态。同时,这样的状态的创建应当足够灵活以实现其在操作期间的在线调整,即,EMA应当能够根据后续实体的要求进行修改/拆分/聚合/删除状态。
学习过程的一部分是以使得不同功能对网络具有共同看法并且来自不同功能的动作可以被比较、关联和协调的方式来描述网络状态。总体上,相应功能可以以不同认知功能(CF)可以理解的方式被描述为对网络环境状态进行建模和抽象。
一些实施例涉及CF和系统的设计,并且具体地关注于CF/CNM系统的环境建模和抽象(EMA)模块的设计和实现。
根据一些示例实施例,提供了一种在通信网络中支持CNM的EMA装置、方法和非瞬态计算机可读介质。
在下文中,通过本发明的实施例并参考附图来描述本发明。
附图说明
图1示出了图示在CNM系统内的包括EMA模块的CF框架的示意图。
图2示出了图示根据一些实施例的EMA模块的组件和输入输出状态的示意图。
图3示出了图示根据一些实施例的EMA模块在环境建模时的逻辑功能的示意图。
图4示出了图示网络状态的内部状态空间表示的示意图。
图5示出了图示根据一些实施例的EMA模块在状态抽象时的逻辑功能的示意图。
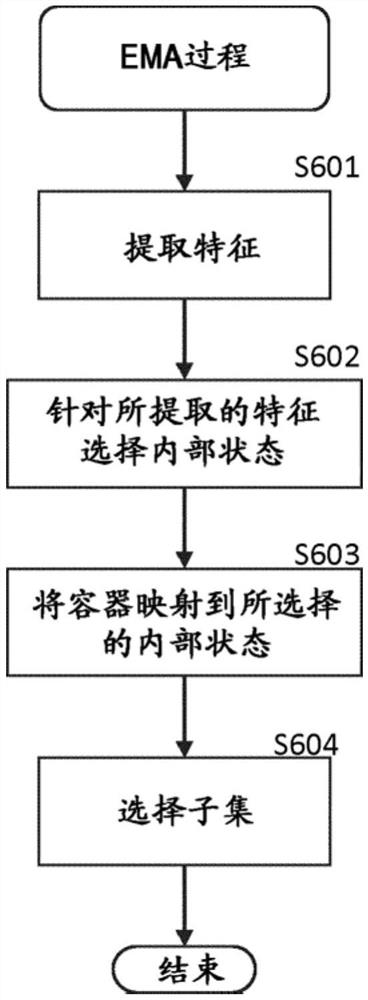
图6示出了图示根据示例实施例的EMA过程的流程图。
图7示出了图示可以在其中实现实施例的示例的控制单元的配置的示意性框图。
图8示出了图示根据示例实现的自动编码器的编码器-解码器过程的示意图。
图9示出了图示根据一些实施例的在不同分布上拟合的SOM的示意图。
图10示出了图示根据一些实施例的将输出状态映射到内部状态空间的示意图。
具体实施方式
图1示出了图示在CNM系统内的包括EMA模块的CF框架的示意图。
CF框架包括图1所示的五个主要组件,这些组件承载CF用以学习和改进先前动作以及用以学习和解释其环境和操作者的目标所需要的功能。
相应组件是:
-网络目标管理器(NOM),其负责解释针对CNM或特定CF的操作者服务和应用目标,以确保CF根据这些目标来调整其行为;
-环境建模和抽象(EMA)模块,其学习以将环境抽象为用于在其他组件中做出后续决策的状态;
-配置管理引擎(CME),其针对CF的不同上下文定义、学习和完善允许的候选网络配置;
-决策和动作引擎(DAE),其学习和匹配由EMA模块得出的当前抽象状态到从合法/可接受的候选网络配置集中选择的适当网络配置(即,“活动配置”);以及
-协调引擎(CE),即使在DAE或CF由其学习性质而导致的不确定性行为中,其也需要协调多个DAE或CF的动作和推荐。
在引文[3]中,EMA模块的预期功能及其对其他子功能的可交付件被指定为,即
-定义例如由定量KPI、抽象(语义)状态标记和操作上下文(例如,当前网络或网络元素配置)的不同组合而构建的抽象状态;
以及
-根据其他CF子功能的需要并在需要时创建新的或改变(修改、拆分、删除等)现有的定量或抽象外部状态
-CME、DAE和CE学习不同配置在不同环境状态中的影响。
以下将要描述的一些实施例关注明确地定义EMA模块。
在下文中参考其中示出了一些但不是全部实施例的附图来更充分地描述的示例实施例中,根据一些示例实施例,术语“数据”、“内容”、“信息”和类似术语可以被互换使用以指代能够被传输、接收、操作和/或存储的数据。此外,如本文中可能使用的术语“示例性”不是为了传达任何定性评估,而是仅仅为了传达对示例的说明。因此,任何这样的术语的使用不应当被视为限制本发明的实施例的精神和范围。
参考图2,根据一些实施例,EMA模块200由4个不同的组件组成,这4个不同的组件一起实现建模和抽象的全局任务。EMA模块200的两个任务/阶段(即,环境建模和状态抽象)中的每个涉及两个内部步骤,其中两个阶段通过如图2所示的状态空间的EMA内部模型而连接。环境建模涉及特征提取和量化以针对给定输入生成等效内部状态。然后,状态抽象进行映射以生成完整输出状态向量,并且对状态向量进行子集设置以针对一个或多个或每个CF选择感兴趣的维度。
如图2所示,根据一些实施例,EMA模块200在给定时刻t的输入是连续取值的环境参数、网络配置值和KPI值X
EMA模块200的输出是一组CF特征向量S,每个CF特征向量S的维度等于或小于m(m是输出状态的数目),并且每个CF特征向量S包含特定认知功能或引擎感兴趣的输出状态。每个CF特征向量S是大网络状态向量的子集,并且包含特征值的不同组合,例如,适用于特定CF。网络状态向量(维度为m)包含沿多个感兴趣/优化的规定(准正交)维度的网络状态。这样的维度可以例如是操作者期望对其采取某些动作的维度,例如,用户移动性、小区负载、能量消耗水平等。它们将由操作者或网络目标管理器通过EMA模块的配置来定义。
参考图3,根据一些实施例,EMA模块200的环境建模块310的功能是在运行时将连续取值的环境参数、网络配置值和KPI值X
在训练时,环境建模块310还需要形成这些内部状态。这等同于通过量化将n维连续空间输入转换为k个离散分段。由于可以预期输入维度中的某些输入维度包含噪声或冗余信息,因此在量化步骤之前使用消除数据的这些干扰部分的特征提取器是有益的。遵循该逻辑,根据一些实施例,环境建模被分为两个逻辑功能:特征提取块311中的特征提取和量化块312中的量化,这两个逻辑功能形成图3所示的前两个EMA步骤。
具体地,根据一些实施例,在第一步骤中,在环境建模块310的特征提取块31中,执行特征提取。对于每个时刻,特征提取块311将输入信息X
在第二步骤中,在环境建模块310的量化块312中,执行量化。量化块312从内部状态空间模型320中选择最能代表推理阶段的当前网络状态的量子,并且在训练时建立量化。
根据一些实施例,EMA模块200的状态抽象块的功能是将由环境建模块310选择的内部状态转换成对CF有用的表示。图4所示的内部状态空间模型320在训练之后不可修改,并且试图包含网络元素的一个或多个或所有行为方面。图5所示的状态抽象块510具有创建灵活映射的任务,该灵活映射可以在运行时期间修改以适应CF的需要。换言之,它弥合了全局内部表示与CF特定表示之间的鸿沟。这实现了更灵活和动态的状态空间映射,并且使得来自认知功能的反馈能够更好地表示特定功能。根据一些示例实现,这两个要求在形成EMA的第三和第四步骤的两个组件中实现,如图5所示。
在第三步骤中,由状态抽象块510执行状态映射。在状态映射中,针对输出网络状态的S
在第四步骤中,由状态抽象块510执行子集设置。在子集设置中,选择整个网络状态向量的不同子集以(仅)支持对应认知功能所需要的必要信息。这是通过对于包括CF
根据一些实施例,由于状态抽象可能受到针对特定维度的约束的重新配置的影响,因此EMA模块200需要具有状态空间的细粒度内部表示,EMA模块200使用该表示来抽象为输出状态。因此,即使重新配置了约束,也不需要重新学习基础状态空间模型,而只需调整内部和外部(输出)状态与子集之间的映射。
应当注意,上述变量n、d、k、m和f是正整数。
现在参考图6,图6示出了图示根据示例实施例的EMA过程的流程图。
在例如无线电接入网络等通信网络中支持CNM的图6的EMA过程可以由EMA装置执行。根据示例实现,EMA装置包括EMA模块200。
在图6的步骤S601中,对于给定时刻t,从n维输入向量X
在图6的步骤S602中,通过针对所提取的向量Y
在图6的步骤S603中,针对m维输出向量S
在步骤S604中,针对f个认知功能中的每个认知功能,从输出向量S
现在参考图7,图7示出了适用于实践示例性实施例的电子设备的简化框图。例如,图7示出了可操作以执行图6所示的过程的控制单元70的配置。根据示例实现,控制单元70是EMA模块200的一部分和/或由EMA模块200使用。
控制单元70包括通过连接74而耦合的处理资源(处理电路系统)71、存储器资源(存储器电路系统)72和接口(接口电路系统)73。
如本申请中使用的,术语“电路系统”可以指代以下中的一个或多个或全部:
(a)纯硬件电路实现(诸如仅在模拟和/或数字电路系统中的实现),以及
(b)电路和软件(和/或固件)的组合,诸如(如适用):(i)处理器的组合,或(ii)处理器/软件(包括数字信号处理器)、软件和存储器的部分,这些部分一起工作以引起诸如移动电话或服务器等装置执行各种功能,以及
(c)需要软件或固件才能运行(即使该软件或固件实际上并不存在)的电路,诸如微处理器或微处理器的一部分。
该“电路系统”定义适用于该术语在本申请中的所有使用,包括在任何权利要求中。作为另一示例,如在本申请中使用的,术语“电路系统”还将涵盖仅处理器(或多个处理器)或处理器的一部分及其(或它们的)随附软件和/或固件的实现。术语“电路系统”还将涵盖(例如并且如果适用于特定权利要求要素)用于移动电话的基带集成电路或应用处理器集成电路、或者服务器、蜂窝网络设备或其他网络设备中的类似集成电路。
术语“连接”、“耦合”或其任何变体是指两个或更多个元件之间的直接或间接的任何连接或耦合,并且可以涵盖在“连接”或“耦合”在一起的两个元件之间一个或多个中间元件的存在。元件之间的耦合或连接可以是物理的、逻辑的或其组合。如本文中采用的,通过使用一根或多根电线、电缆和印刷的电连接,以及通过使用电磁能,诸如波长在射频区域、微波区域和光学(可见和不可见)区域的电磁能(作为非限制性示例),两个元件可以被视为“连接”或“耦合”在一起。
存储器资源(存储器电路系统)72存储被假定为包括程序指令的程序,该程序指令在由处理资源(处理电路系统)71执行时使得控制单元70能够根据示例性实施例进行操作,如本文中详述的。
存储器资源(存储器电路系统)72可以是适合于本地技术环境的任何类型,并且可以使用任何合适的数据存储技术来实现,诸如基于半导体的存储器设备、磁存储器设备和系统、光存储器设备和系统、固定存储器和可移动存储器,包括非瞬态计算机可读介质。处理资源(处理电路系统)71可以是适合于本地技术环境的任何类型,并且作为非限制性示例,可以包括通用计算机、专用计算机、微处理器、数字信号处理器(DSP)和基于多核处理器架构的处理器中的一种或多种。
在按需要使用EMA模块200之前,需要对EMA模块200进行训练。可以根据对网络在不同状态下的观察来训练上述第一到第三步骤,而第四步骤需要来自实际CF的反馈以训练子集设置器来学习相应子集。尽管很容易考虑手动设计和构建完成第一到第三步骤的映射功能,即,将连续空间中的每个观察映射到准正交维度上的离散值的向量,但这并非是清楚的活动。相应地,需要训练过程以确保EMA模块200学习最佳匹配功能,如下面更详细描述的。
EMA模块200的关键部分是实现由环境建模模块310创建的内部状态表示。然后,这是用于状态抽象模块510创建CF特定输出的输入,该输出很好地表示在该时间的网络状态,无论是从总体上还是针对特定CF的需求而言。
为了使内部状态空间模型320在不考虑用户偏差的情况下映射网络的行为,环境建模功能需要能够以无监督方式被训练,而无需对训练数据进行标记。通常,大多数无监督学习算法确实需要少数几个元参数,这些元参数必须在用户或实现者进行训练之前进行设置。在训练之后,环境建模(EM)步骤将不可重新配置,并且应当使用来自网络的尽可能多的数据进行训练,以能够形成可以应用于一个或多个或所有网络元素和CF的全面映射。
状态抽象(SA)功能需要以有监督或半监督方式进行训练,这主要是因为需要CF反馈有关CF的不同维度的效用。
预见到四个组件中的每个组件都有多个实现选项,下面将对其进行描述。实现选项之间的区别之一是每个阶段(建模或抽象)中的两个逻辑功能是作为单独步骤实现还是可以合并到单个学习阶段中。
根据示例实现,在图6的步骤S601中,在EMA模块200的训练期间(以及在运行时),使用独立分量分析来从输入向量X
独立分量分析(ICA)是一种用于查找作为随机变量集合基础的隐藏因素的统计技术。假定数据变量是一些未知的潜在的非高斯和相互独立的变量与未知混合机制混合而成的线性混合:即,X=AS,其中S是潜在向量。
预处理:最基本和必要的预处理是将S居中,即,减去其平均向量m=E{X}以使X成为零均值变量。在用中心数据估计混合矩阵A之后,可以通过将S的平均向量添加回到S的中心估计来完成估计。S的平均向量由A
很多ICA算法的第一步骤是通过消除数据中的任何相关性来白化数据。在白化之后,可以通过将白化信号y正交变换为关节密度的旋转来找到分离信号。有很多执行ICA的算法,一种非常有效的算法是在引文[4]中描述的FastICA(定点)算法,该算法找到权重向量为W
FastICA基于定点迭代方案,该定点迭代方案用于找出W
FastICA算法的基本形式如下所示。为了防止不同向量收敛到相同最大值,必须在每次迭代之后对输出W
1.选择初始(例如,随机)权重矩阵W。
重复,直到收敛:
2.令W+=E{Xg(W
3.令W=W+/||W+||,其中||·||是范数,例如,第二范
数
4.a)令W=W/√||WW
重复,直到收敛
b)令W=1.5W-0.5WW
根据另一示例实现,在图6的步骤S601中,在EMA模块200的训练期间(以及在运行时),使用自动编码器从输入向量X
自动编码器是一种用于学习给定数据集的有效编码的无监督神经网络。对于数据集X,自动编码器使用函数θ将X编码为中间表示Z,然后将Z解码为X'(通过映射函数θ'对X的估计)。这由图8表示,其中中间表示Z是希望学习的所提取的无噪声特征的集合。
中间表示的维度m取决于(并且等于)隐藏层的大小,并且可以具有比输入/输出层更低或更高的维度。自动编码器通过使用特定准则(通常是均方误差或交叉熵损失)使X与X'之间的差异最小化来学习编码和解码函数θ、θ'。在训练之后,使用该隐藏层编码压缩信息,去除不必要和嘈杂的信息。
根据另外的或另一示例实现,在图6的步骤S602中,在EMA模块200的训练期间,获取d维的训练特征向量,并且使用K均值和自组织映射算法中的至少一项以训练特征向量作为输入,对内部状态空间模型320进行学习以遵循训练特征向量的分布。
对于量化,两种常用的算法是可能的:K均值和自组织映射(SOM)算法(在引文[6]中描述)。这两种算法实现相似或相同的功能,即将输入空间划分为多个分段,而同时拟合该分段以很好地遵循训练数据集的分布。这两种算法都要求在训练之前预先定义量子的数目(k),但是,存在两种算法的技术可以自动找出k的最佳数目。在EMA的情况下,量化需要创建足够精细的分段,以便以后可以精确进行状态提取。这表示,预设的高数目的量子(100-1000)应当是足够的,而无需以后再微调k。除了参数k,训练不需要其他参数,这完全是无监督的。图9示出了在不同分布上拟合的SOM a)至c)。
K均值和SOM算法的缺点是,由于它们试图表示数据的密度,因此它们可能不足以表示状态空间的各部分,在这种情况下,这是不希望的。在这种情况下,可以考虑边界球量化(BSQ)算法(在引文[10]中描述)。它使用与K均值相似或相同的算法框架,但是使用不同的目标函数。
根据另外的或另一示例实现,在图6的步骤S602中,在EMA模块200的训练期间,获取n维训练输入向量,并且使用稀疏自动编码器以训练输入向量作为输入来学习维度为d的内部状态空间模型320以遵循训练输入向量的分布。
自动编码器可以具有独特的正则化机制,其中可以在(多个)中间层中强制执行各种程度的稀疏性,因此鼓励在任何输入向量处仅发射少量神经元。如果用户强制极端稀疏,则中间神经元自行构造自身和整个编码过程,使得每个神经元包含输入空间的某个有限区域,这与显式量化算法非常相似。但是,即使是非常稀疏的自动编码器也不会失去从输入空间中提取关键特征的能力。这允许在单个步骤中同时使用稀疏或k稀疏自动编码器(在引文[7]中描述)作为特征选择器和量化器。这提供了具有端到端训练结构的更统一的方法。
根据另外的或另一示例实现,在图6的步骤S603中,在EMA模块200的训练期间(以及在运行时),基于至少基于输出状态容器的分布和数目之一而创建的训练数据形成用于将输出状态容器映射到所选择的内部状态的标记。
特别地,例如图5所示的映射器创建和存储每个输出状态的特定映射,以在细粒度内部表示与输出状态容器之间进行转换。在图10中可以看到单个映射的图示。为此,每个输出状态存在个体映射器。
映射器模块的示例实现与图10中的示例相似,即,映射是标记任务,其中对于每个输出状态,内容存储在内部表示中,从而在内部状态与输出状态容器之间创建1:1映射。使用所支持的训练数据(示例)作为输入向量和所需要的S容器对组合,可以最好地完成该标记的形成。该训练数据可以由用户手动创建,也可以由NOM模块根据特定参数(诸如容器的分布和数目)自动生成。
LSTM(长短期记忆)(在引文[8]中描述)神经网络也可以用作标记器。这些功能通过向系统添加存储器来扩展内容标记方法。这对于显示复杂时间行为的状态很有用,并且不一定以1:1的方式映射到唯一内部状态。LSTM的训练可以通过与简单标记、生成或制造标记观察结果以用作训练示例的方式相似或相同的方式来实现。
子集设置模块(例如,图5中所示的子集设置器)针对每个连接的CF挑选和选择相关输出状态。选择受特定CF的强烈影响,需要以某种形式来自CF的反馈。出于这个原因,考虑了关于如何在训练期间或运行时进行该特征选择的三种可能性,如图5所示。
第一种可能性是动作反馈,其中CF(图5中的CF
第二种可能性是直接反馈,其中CF(图5中的CF
第三种可能性是无反馈,其中CF(图5中的CF
子集设置的较容易部分是在直接反馈提供良好程度的数值的情况下。有了这些信息,可以采用诸如遗传算法(在引文[9]中描述)等搜索方法来找出要对每个CF支持的一组最佳输出状态。但是,搜索需要对候选状态集进行多次评估,这需要一种将搜索与真实网络分离的环境,诸如CF行为的高级数值建模、或者EMA和CF都在其中实现的网络的较低级别模拟。
通过监测CF采取的动作来找出CF响应最多的信息也可以使用遗传算法来完成,但是这种解决方案可能会针对CF的需求产生次优结果,因为精确决策可能需要仅稀疏使用的信息。在这种情况下,子集设置模块的训练可以以与直接反馈情况类似或相同的方式进行。
用于建模和抽象两者的适用技术需要大量的数据来训练算法,但是该数据很难获得。为了在即使没有该必要训练数据的情况下也能最终实现功能性EMA模块,提出了以下过程。
首先,经由系统模拟执行初始训练。从系统模拟器中生成的数据具有足够的大小并且具有足够的细节以进行初始训练。
然后,执行在线半监督训练。经过部分训练的EMA模块被附接到实时系统以从实时数据中学习,但无需从其学习中得出任何动作。替代地,如果所建议的抽象状态不是人类操作者期望的抽象状态,操作者可以例如通过调整建模步骤中计算的误差,来进一步训练EMA模块。
根据一些实施例,对网络状态的统一但可重新配置的描述被启用。后续实体能够针对相应决策引用相似或相同的状态。这些状态还可以用于报告目的,例如以声明网络在不同时间被观察到处于特定状态的频率。
此外,一旦经过训练,EMA模块就可以在需要最少的再训练的情况下在多个网络中使用。
根据一个方面,提供了一种用于在通信网络中支持认知网络管理CNM的环境建模和抽象EMA装置。EMA装置包括:用于针对给定时刻t从n维输入向量X
根据示例实现,用于提取的部件使用独立分量分析和自动编码器中的至少一项从输入向量X
根据示例实现,EMA装置还包括:用于获取d维训练特征向量的部件,以及用于使用K均值和自组织映射算法中的至少一项以训练特征向量作为输入来学习内部状态空间模型以遵循训练特征向量的分布的部件。
根据另一示例实现,EMA装置还包括:用于获取n维训练输入向量的部件,以及用于使用稀疏自动编码器以训练输入向量作为输入来学习维度为d的内部状态空间模型以遵循训练输入向量的分布的部件。
根据示例实现,EMA装置还包括用于基于训练数据来形成用于将输出状态容器映射到所选择的内部状态的标记的部件,训练数据至少基于输出状态容器的分布和数目之一而被创建。
根据示例实现,用于选择的部件通过如下方式来选择f个不同子集:监测认知功能的输出并且基于所监测的输出来选择不同子集。
根据示例实现,用于选择的部件通过如下方式来选择f个不同子集:从认知功能接收指示子集的评估的数值并且基于该数值来选择不同子集。
根据示例实现,EMA装置被实现为分类器,该分类器被配置为将关键性能指标值或关键性能指标值的组合聚类为彼此在逻辑上可区分的子集。
根据示例实现,EMA装置包括图7所示的控制单元70,并且上述部件由处理资源(处理电路系统)71、存储器资源(存储器电路系统)72和接口(接口电路系统)73来实现。
应当理解,以上描述是说明性的,而不应当被解释为限制本公开。在不脱离由所附权利要求限定的本公开的真实精神和范围的情况下,本领域技术人员可以想到各种修改和应用。
- 用于认知功能的网络状态的环境建模和抽象
- 用于存储器抽象以及用于使用该存储器抽象进行字级网表简化及其验证的方法和设备