一种太阳能光跟踪装置及控制方法
文献发布时间:2023-06-19 10:35:20
技术领域
本发明属于精密仪表测量技术领域,具体涉及一种太阳能光跟踪装置及控制方法。
背景技术
随着科技的发展和时代的进步,各种新技术的能量消耗越来越高。石油、煤炭、天然气等矿物能源主要来自动物化石,因其储量有限,所以终将被耗尽。因此,开发一种新型能源并利用其能量是迫在眉睫的。而矿物能源在燃烧时会产生大量的有毒物质,需要花费大量资源来消除这些有毒物质的影响,并且矿物燃料在燃烧过程中同样会产生大量的二氧化碳,从而引起全球气温上升,导致温室效应,破坏生态平衡,因此各种绿色能源的优越性也体现了出来。在众多的绿色能源当中,太阳能因其分布广泛、环境友好、储量巨大的特点被人们认为是新能源领域优秀的发展议题,但同时太阳能也有分布不均、昼夜交替间断性强等缺点,这些问题阻碍人们持续稳定的利用太阳能。太阳能的利用是机遇与挑战并存的,这些机遇与挑战吸引着一代又一代的科学家们投入到太阳能发电技术的研究当中。太阳能发电装置有很多种,其中,太阳能光跟踪装置作为一款太阳能发电装置,已经成为了现代能源产业的重要支柱。
2008年发表在可再生能源(第26卷第2期)的“光伏发电系统多方位检测与跟踪技术”一文中提出的N路多方位检测法是将N个光电探测器均匀地放置在一个半圆弧上,当太阳光入射时,控制装置通过探测各个光电探测器产生的电压信号幅值来找出当前时刻电压最强的光电探测器,并通过X轴舵机、Y轴舵机驱动太阳能电池板向该电压最强的光电探测器的方向旋转,完成整个驱动流程,实现太阳能发电效率最大化。
但是该文所述传统N路多方位检测法太阳能跟踪装置的控制装置与驱动装置并未分离,无法实现一路控制装置控制多路驱动装置;结构复杂,模块化程度低,驱动装置复杂,无法实现小型化、模块化,不便于实现各种功能与维护。
发明内容
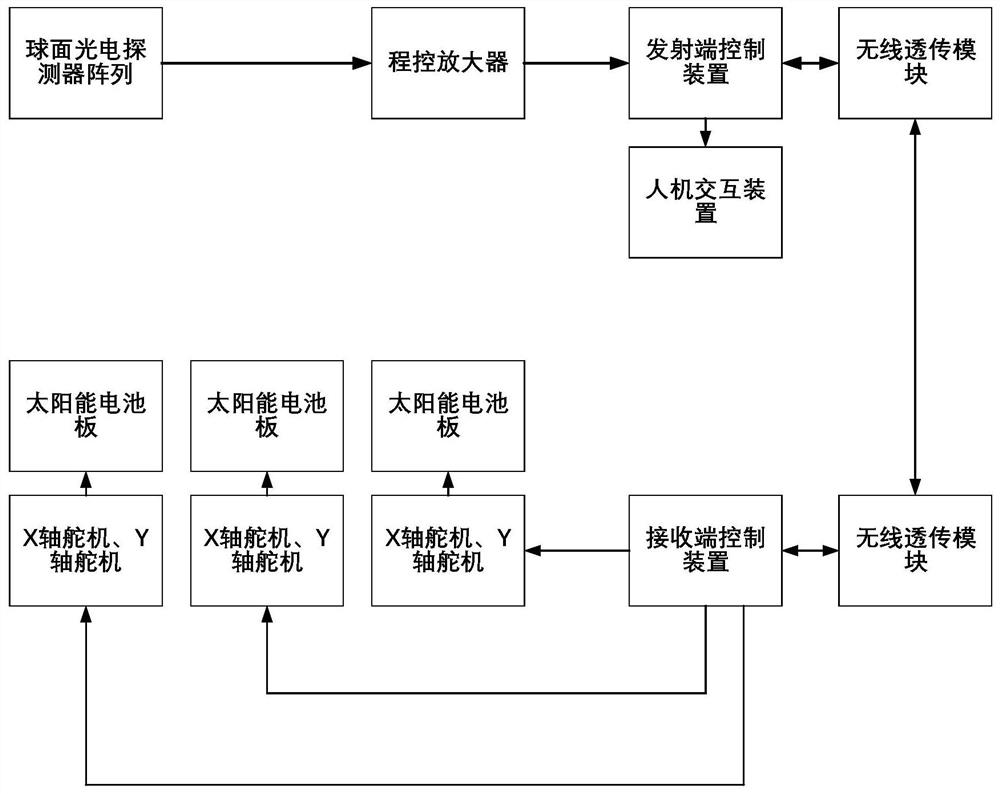
针对现有太阳能探测装置中存在控制与驱动装置无法分离、模块化程度低等问题,本发明提供了一种驱动装置与控制装置分离的太阳能光跟踪装置,由球面光电探测器阵列、程控放大器、发送端控制装置、人机交互装置、无线透传模块、接收端控制装置和太阳能电池板组成。本发明也提供了一种太阳能光跟踪装置的控制方法,可以使本发明所述的太阳能光跟踪装置在不同天气条件下都能正常工作。
如图2所示,球面光电探测器阵列由一对一连接的光电探测器阵列和光电探测器模拟开关模块组成,图2的原理图展示了7个模拟开关与7个光电探测器的连接方式,实际上本系统共需49个光电探测器,因此需要49个模拟开关。本发明所述的太阳能光跟踪装置中所有的模拟开关模块的工作原理和连接关系全部相同,一个模拟开关模块内含8个开关,可控制8条光电探测器回路的通断,故控制49个光电探测器实际共需要7个模拟开关模块,全部的光电探测器的所有负极均与地线相连,每一个光电探测器的正极分别连接至对应的模拟开关模块的INOUT引脚,所有的模拟开关模块的OUTIN引脚全部连接到一起作为球面光电探测器的输出端,经电阻R14后连接至一级放大电路的同相输入端(引脚3)。
程控放大器由一级放大电路、仪表放大器放大电路和减法电路组成。如图3所示,一级放大电路由运算放大器U6、电容(C10、C11、C14、C15)与电阻(R14、R15、R16)构成;其中,电容值104=10*10
如图4所示,仪表放大器放大电路由模拟开关模块U3、电阻(R11、R9、R8、R13、R6、R12、R7、R1)、电容(C8、C9、C12、C13)与仪表放大器U5构成;模拟开关模块U3的INOUT/0-INOUT/7引脚每个引脚都连接1个电阻,依次为R11、R9、R8、R13、R6、R12、R7、R10;电阻的另一端连接到一起后连接到仪表放大器U5两个RG引脚其中的一个(如RG2),模拟开关模块的OUTIN引脚连接仪表放大器的另一个RG引脚(如RG1);由发送端控制装置MCU控制模拟开关模块的A、B、C引脚的电平发生改变,就可以使INOUT/0-INOUT/7任意一个引脚在模拟开关模块U3内部与OUTIN引脚连接构成通路,RG1和RG2引脚间的电阻阻值决定仪表放大器的放大倍数,从而实现对仪表放大器U5同相输入端信号的放大,对应的电压放大倍数依次为2倍、5倍、10倍、25倍、50倍、75倍、100倍、200倍,放大倍数的公式为:
如图5所示,减法电路由稳压芯片U1、电阻(R1、R2、R3、R4、R5)、电容(C1、C2、C3、C4、C5、C6、C7)、模拟开关模块U2和运算放大器U4构成。稳压芯片内部能自动稳压,U1的VOUT引脚与模拟开关模块U2的OUTIN引脚通过电阻R2相连;模拟开关模块U2的INOUT/0-INOUT/3引脚均连接了一个电阻,依次为R4、R3、R1、R5,这些电阻的另一端连接在一起后接地;通过发送端控制装置的MCU控制模拟开关模块A、B、C引脚输出不同高低电平,可以实现INOUT/0-INOUT/3引脚分别与OUTIN引脚在模拟开关模块U2内部连接构成通路;模拟开关模块U2的OUTIN引脚与电阻R2连接点位置再与运算放大器U4同相输入端(引脚3)连接,则该点电压由电阻R2与INOUT/0-INOUT/3引脚其中一个电阻(R4、R3、R1或R5)的分压决定;运算放大器U4输出端(引脚6)与反向输入端(引脚2)连接构成一个电压跟随器,可以使由上述电阻分压产生的电压值更稳定,图5运算放大器U4的输入端(引脚3)与图4仪表放大器U5反向输入端(引脚1)连接,反向输入端的电压(图4U5引脚1)与仪表放大器同相输入端的电压(图4U5引脚4)在仪表放大器内部自动相减,完成减法功能。
如图6所示,发送端控制装置由带有ADC模块的MCU、发送端无线透传模块和人机交互装置组成。MCU为STM32单片机,MCU的PC0引脚连接MCU内部的ADC模块,ADC模块将仪表放大器输出端输入到MCU PC0引脚的电压信号,并将该模拟信号转变为数字信号;球面光电探测器阵列逐一输入到程控放大器的电压信号会产生一系列的数字信号,由MCU选取出电压信号幅值最大的光电探测器,然后将该光电探测器事先通过代码编程存储在MCU中的角度信息通过MCU的MOSI接口发送到发送端无线透传模块中,再通过发送端无线透传模块将数据发送到接收端控制装置中。人机交互界面由LCD(Liquid Crystal Display)液晶屏组成,其上能够显示哪一个光电探测器对应角度的光强最强。
如图7所示,接收端控制装置由接收端无线透传模块、多组X轴舵机与Y轴舵机组成;接收端无线透传模块接收到发送端无线透传模块发送的电压信号后,将该信号传送给发送端控制装置中MCU,由MCU发出指令控制多组X轴舵机和Y轴舵机转动使与X轴舵机和Y轴舵机间固定安装的太阳能电池板准确面向太阳光。
本发明所述的太阳能光跟踪装置中的所有电容都与芯片的电源引脚相连用作稳压,地线为电路板的电势零点。所有的模拟开关模块均由发送端控制装置中的MCU(Microcontroller Unit)进行控制。本发明所述的太阳能光跟踪装置的工作过程是:光电探测器阵列接收到太阳光后产生电压信号,在发送端控制装置MCU的控制下,光电探测器模拟开关模块逐一导通,将产生的电压信号逐一输入到程控放大器进行放大;放大的电压信号再输入到发送端控制装置MCU中的ADC模块,通过ADC模块将模拟信号转变为数字信号,由MCU选取出电压信号幅值最大的光电探测器,然后将该光电探测器事先通过代码编程存储在发送端控制装置MCU中的角度信息通过无线透传模块发送到接收端控制装置(图6和图7中的ANT为无线透传模块的天线);接收端控制装置接收到电压信号幅值最大光电探测器的角度信息后,同时控制多组X轴舵机和Y轴舵机转动使与X轴舵机和Y轴舵机间固定安装的太阳能电池板准确面向太阳光,即太阳能电池板与太阳光入射方向垂直。
本发明的另一目的在于提供一种太阳能光跟踪控制方法,具体步骤如下:
步骤1:通过发送端控制装置中的MCU控制图2中模拟开关模块通断来使球面光电探测器阵列中的光电探测器逐一导通,球面光电探测器阵列可以接受到阵列中49个光电探测器所在角度的太阳光;其中,以球面光电探测器圆形底座的圆心为中心,垂直高出一个圆形底座半径的高度安装一个光电探测器;以圆形底座圆心为轴,圆形底座半径为长,从圆形底座向上偏转22.5度并旋转一圈的圆环上放置16个光电探测器,每个探测器以圆形底座圆心为中心相差22.5度,圆形底座向上偏转45度和67.5度并旋转一圈的圆环上也放置16个光电探测器,每个探测器以圆形底座圆心为中心相差22.5度。其中,所有的圆环均为虚拟的,为方便描述光电探测器位置而引入,球面光探测器阵列俯视图见图2,每个圆点即为一个光电探测器,后文描述了球面光电探测器阵列的搭建方式。
步骤2:将导通的光电探测器产生的电压信号(图2的IN_U1_0信号,此信号名字无具体意义)输入到程控放大器的一级放大电路部分进行放大,放大倍数为4~8倍;
步骤3:将一级放大电路放大后的电压信号(图3中U6引脚6输出的信号,图4中U5引脚4输入的信号)输入到程控放大器的仪表放大器放大电路部分,即图3中U6引脚6输出的信号,输入到图4中U5的引脚4,由于光电探测器产生的电压信号幅值与太阳光光强的关系曲线十分平缓,斜率较小,光强大范围变化后光电探测器产生的电压信号幅值变化较小,所以需要通过减法电路减去光电探测器产生的电压信号幅度的80%来扩大不同光电探测器产生的电压信号的区别。将减法电路产生的电压信号(图5中U4脚6产生的信号VIN-)输入到仪表放大器放大电路的仪表放大器的反向输入端(图4中U5引脚1),将一级放大电路放大的电压信号(图3中U6引脚6)输入到仪表放大器的同相输入端(图4中U5引脚4),同相输入端与反向输入端的电压信号在仪表放大器内部自动相减。通过MCU控制与仪表放大器放大电路连接的模拟开关模块通断(图4中U3的INOUT/0~INOUT/7),从而选取接入电路的电阻,通过电阻阻值的不同来选取不同的放大倍数对于减去80%幅值的信号进行二级放大,放大倍数可调,为2~200倍,如果当前放大倍数过高导致仪表放大器理论输出值高于电源电压值,从而导致不同光电探测器的电压信号只能被放大到电源电压值,无法进行电压信号的区分,则需要通过调整接入电路的电阻来降低放大倍数。
步骤4:将仪表放大器放大电路放大后的电压信号通过MCU的ADC模块进行模数转换处理,并比较不同光电探测器电压信号幅值的大小,选取电压信号幅值最大的探测器,读取其角度值,将其角度值通过发送端控制装置的无线透传模块发送到接收端控制装置。
步骤5:接收端控制电路接收到角度值后,控制多组X轴舵机和Y轴舵机使被固定在舵机上的太阳能电池板转向对应的角度值,完成太阳能电池板对于太阳光的跟踪。其中,舵机上会固定安装一块平板,通过螺丝与螺母将太阳能电池板安装在平板上完成固定。
与现有技术相比,本发明的优点如下:
1、电路模块化程度高,结构简单,便于维护;
2、实现了太阳能光跟踪装置控制装置和驱动装置的分离,可以进行一路控制装置驱动多路控制装置,便于控制;
3、可以通过程控放大器控制电压放大倍数的大小来满足不同气候环境光强不同时的光跟踪要求,适应性强;
4、通过减法电路去除多余的电压,可以分辨极小角度的太阳光,控制更为精确。
附图说明
图1为本发明的一种新型太阳能光跟踪装置的原理框图;
图2为球面光电探测器阵列的原理图;
图3为一级放大电路的电路图;
图4为程控放大器的电路图;
图5为减法电路的电路图;
图6为发送端控制装置的原理图;
图7为接收端控制装置的原理图。
具体实施方式
以下参照附图,以具体实施例对本发明作进一步详细说明。应当理解的是,此处所描述的具体实施方式仅用于说明和解释本发明,并不用于限制本发明。
实施例1
一种新型太阳能光跟踪装置的电路结构如下:
本发明所述的一种太阳能光跟踪装置,由球面光电探测器阵列、程控放大器、发送端控制装置、人机交互装置、无线透传模块、接收端控制装置、X轴舵机、Y轴舵机、太阳能电池板组成。其中,程控放大器由一级放大电路、仪表放大器放大电路与减法电路组成。一级放大电路由运算放大器、电容与电阻构成,仪表放大器放大电路由模拟开关模块、电阻、电容、运算放大器与仪表放大器构成,减法电路由稳压芯片、电阻、电容、模拟开关模块构成;发送端控制装置包含ADC模块,使用MCU对装置进行控制;球面光电探测器阵列可以探测太阳光,由光电探测器与模拟开关模块组成;人机交互界面由LCD液晶屏组成;太阳能电池板被安装在X轴舵机、Y轴舵机上;整套装置所有的模拟开关模块均由发送端控制装置的MCU进行控制。
具体工作流程如下,通过球面光电探测器阵列中的光电探测器接收到太阳光产生电压信号后,将产生的电压信号输入到程控放大器电路放大后,输入到发送端控制装置中的ADC,通过ADC将模拟信号变为数字信号后,选取出电压信号幅值最大的光电探测器;提前将光电探测器的角度计算出来,并将角度值存放在MCU当中;将该光电探测器存放在发送端控制装置的角度信息通过无线透传模块发送到接收端控制装置,接收端控制装置接收到光电探测器电压信息后,控制X轴舵机和Y轴舵机使太阳能电池板转向该光电探测器对应角度,使其准确面向太阳光照最强的角度。
本实施例所使用的STM32芯片为STMicroelectronics公司的STM32F103ZET6,该单片机芯片完成信号的采集、处理以及多路模拟开关模块的控制。在STM32单片机内部所有参与工作的模块,具体包括ADC模块,用来驱动人机交互界面LCD屏幕的FSMC接口,各路I/O口;图2中的模拟开关模块与图4、图5中的模拟开关模块选用德州仪器(TI)公司的CD4051芯片;精密运算放大器图5中的U4、图3中的U6选用亚德诺半导体(ADI)公司的ADA4610;仪表放大器图4中的U5选用亚德诺半导体公司的AD8422;减法电路稳压芯片图5中的U1选用亚德诺半导体公司的AD586;无线透传模块选用NRF42L01模块。
实施例2
一种新型太阳能光跟踪装置的控制方法的具体实施步骤如下:
步骤1:
本步骤的电路结构如图2所示,首先说明光电探测器的位置,其中,以球面光电探测器圆形底座的圆心为中心,垂直高出一个圆形底座半径的高度安装一个光电探测器;以圆形底座圆心为轴,圆形底座半径为长,从圆形底座向上偏转22.5度并旋转一圈的圆环上放置16个光电探测器,每个探测器以圆形底座圆心为中心相差22.5度,圆形底座向上偏转45度和67.5度并旋转一圈的圆环上也放置16个光电探测器,每个探测器以圆形底座圆心为中心相差22.5度。其中,所有的圆环均为虚拟的,为方便描述光电探测器位置而引入,实际光电探测器会安装在对应位置上的电路板上,球面光探测器阵列俯视图见图2,每个圆点即为一个光电探测器。然后搭建球面光电探测器结构,该球面为立体电路板,由直径相同的一个圆形电路板、一个半圆形电路板与14个四分之一圆电路板组成。将圆形电路板作为底座,首先将半圆形电路板垂直安装在圆形电路板上,半圆形电路板的平面通过圆形电路板的圆心;将14个四分之一圆电路板以圆形电路板的圆心为轴,从半球形电路板边缘开始,每隔22.5度安装一个四分之一圆电路板,最终构成一个半球形电路板。并在球面板上安装49个光电探测器,具体安装位置见图2,球面光电探测器阵列的每一个圆点即为一个光电探测器,从球面光电探测器圆心引出的虚线即为14个四分之一圆形电路板与1个半圆形电路板,光电探测器安装在四分之一圆形电路板与半圆形电路板上。一个模拟开关模块内含8个开关,可控制8条回路的通断,故控制49个光电探测器实际共需7个模拟开关模块,连接方式与原理图相同,通过发送端控制装置的MCU控制模拟开关模块A、B、C引脚输出不同高低电平,可以实现INOUT/0-INOUT/7引脚分别与OUTIN引脚在模拟开关模块内部连接构成通路;全部的光电探测器的所有负极均与地线相连,每一个光电探测器的正极分别连接至模拟开关模块的INOUT引脚,所有模拟开关模块的OUTIN引脚全部连接到一起,图2中模拟开关模块的原理图与图4图5中模拟开关模块的使用方式完全相同,为避免赘述,故在此不作详细介绍,通过模拟开关模块将多路光电探测器与后级一级放大电路连接,将光电探测器的信号依次输入到一级放大电路中进行放大。
步骤2:
本步骤的电路结构如图3所示,其中电路所用芯片型号、电阻值、电容值均已在图3中标明,未标注单位的电阻电容值为电子行业规定的简写方式,如104=10*10
在图3中,所述运算放大器同相输入端(3引脚)电压为V
则根据电气连接与运放特性可得:
步骤3:
本步骤的电路结构如图4、图5所示,程控放大器放大电路由模拟开关模块U3,仪表放大器U5,电阻R6、R7、R8、R9、R10、R11、R12、R13,电容C8、C9、C12、C13构成。减法电路由稳压芯片U1、模拟开关模块U2、以及用来稳定输出的运算放大器U4、电阻R1、R2、R3、R4、R5、电容C2、C3、C4、C5、C6、C7构成,图4的U5的4引脚与图3的U6的6引脚相连,U5的1引脚与图5的U4的6引脚相连,U5的7引脚为仪表放大器放大电路的输出,通过图6PC0引脚进入到图6中MCU的ADC模块。
将图3一级放大电路放大后的电压信号输入到图4的仪表放大器放大电路中的仪表放大器同向输入端。仪表放大器同时也与模拟开关模块连接,通过MCU控制模拟开关模块的INH引脚为低电平使模拟开关模块可以开始正常工作,INH引脚为低后,可以通过MCU控制U2中A、B、C引脚来控制INOUT/0~INOUT/7其中一路与OUTIN引脚导通,具体控制方式如下,设高电平为1,低电平为0,则ABC=000对应INOUT0引脚与OUTIN引脚连接,ABC为001、010、011、100、101、110、111时分别对应着INOUT1引脚、INOUT2引脚、INOUT3引脚、INOUT4引脚、INOUT5引脚、INOUT6引脚、INOUT7引脚与OUTIN引脚连接。通过不同路模拟开关模块连接的电阻不同,使仪表放大器的放大倍数不同,从而实现不同电压倍数的放大。一级放大器输出的电压最大不会超过放大器电源电压值,放大器电源电压即为12伏与负12伏,故放大后的电压信号值最大不会超过12伏。当光强过强,放大器输出饱和时,所有光电探测器的输入将相同,无法区分光强最强的角度,所以需要通过单片机控制模拟开关模块选取不同路的电阻,调低放大倍数到放大器未饱和的状态继续工作,电路可以设定多种电压放大倍数工作,以满足不同的气候状况。
但由于光电探测器光强与输出电压曲线十分平缓,斜率非常小,不同角度光电探测器电压差十分微小,单独的程控放大器无法对光电探测器信号做出有效区分,因此需要引入图5中的减法电路。通过减法电路减去经过图3一级放大电路放大后电压的多余部分的方式来扩大不同角度光电探测器产生的电压信号幅值之间的差异,这之后再经过程控放大器放大电路进一步放大信号之间的差异。减法电路也具有单片机控制的模拟开关模块装置,可以实现多种数值的相减,由图3、图4、图5组成的放大电路部分十分灵活,可以实现多种电压大小的输出,因此该装置及其控制方法可以适应不同环境与气候下的太阳光的跟踪工作。
所述减法电路通过稳压芯片产生的电压为V
则根据电气连接与分压特性可得:
电路中仪表放大器可以选用AD8422芯片,设放大倍数为G、增益电阻(图4中U5的3引脚或2引脚连接的电阻)为R
将仪表放大器的参考电平引脚(图4的U5的6引脚)与地线相连,仪表放大器输出端电压为V
V
其中:V
步骤4:将程控放大器二级放大后的电压信号输入到发送端控制装置的MCU的ADC模块当中进行处理,将数据存入到数组中进行冒泡排序,选取到电压最大的值,读取该最大值对应光电探测器的角度值,将角度值数据打包后通过无线透传模块将数据从发射端控制装置向接收端控制装置发射。
步骤5:接收端控制装置在接收到发送端控制装置发送的数据后,首先对数据进行解压,然后将解压后的数据输入到接收端控制装置的单片机中,由单片机控制X轴舵机、Y轴舵机带动太阳能电池板阵列转向步骤4读取的光强最大的光电探测器对应的角度。
其中,人机交互界面由LCD屏幕构成,屏幕可以显示各个光电探测器的光前与电压信号;舵机由单片机产生的PWM波控制,可进行180度的旋转,PWM周期为2.5微秒,当占空比为20%时,舵机角度为-90度;当占空比为50%时,舵机角度为0度;当占空比为100%时,舵机角度为90度。通过控制PWM波形的占空比,可以实现太阳能板任意角度的旋转。
其中,上述所有电容在电路中起到稳压滤波的作用。
以上结合附图详细描述了本发明的优选实施方式,但是,本发明并不限于上述实施方式中的具体细节,在本发明的技术构思范围内,可以对本发明的技术方案进行多种简单变型,这些简单变型均属于本发明的保护范围。
另外需要说明的是,在上述具体实施方式中所描述的各个具体技术特征,在不矛盾的情况下,可以通过任何合适的方式进行组合,为了避免不必要的重复,本发明对各种可能的组合方式不再另行说明。
此外,本发明的各种不同的实施方式之间也可以进行任意组合,只要其不违背本发明的思想,其同样应当视为本发明所公开的内容。
- 一种太阳能光跟踪装置及控制方法
- 光发电装置、该光发电装置中的最大功率点跟踪控制方法、以及具备该光发电装置的移动体