一种转弯机动下的多星凸型扩展目标跟踪方法
文献发布时间:2023-06-19 11:35:49
技术领域
本发明涉及多扩展目标跟踪技术领域,具体的说是一种转弯机动下的多星凸型扩展目标跟踪方法。
背景技术
多扩展目标跟踪技术的目的是根据雷达等传感器获得的量测数据估计监测区域内多个动态扩展目标的质心动态、扩展形态以及个数。扩展目标为在高分辨率传感器中可能占据多个分辨率单元的目标。该目标可能产生多个量测数据,这些量测数据为目标大小、形状和朝向等扩展形态估计提供了可能性,故这类目标的目标状态通常包含扩展形态变量(如大小、形状和朝向等)、动态变量(如位置、速度和加速度)。多扩展目标跟踪技术作为一种典型且具有实践场景的工程技术,可在实际作战场景中跟踪空中目标、地面目标等作战目标,对日益复杂化的作战指挥系统具有重要指导意义。
在复杂机动情况下如何准确估计多个动态目标的扩展形态、质心运动状态以及目标数的准确估计已经成为多扩展目标跟踪技术的重要问题。与传统目标跟踪技术不同,多扩展目标跟踪技术不仅需要对目标质心动力学建模,还需要对扩展形态进行建模。不同形状的扩展目标往往采取不同的建模方法,比如椭圆型扩展目标采用随机矩阵方法。为更加贴近实际空中飞行目标的形状,一种随机超曲面模型方法被提出,不仅可以描述椭圆型扩展目标,也可以描述更加复杂的星凸型扩展目标。
根据不同的扩展形态模型,多扩展目标跟踪技术需要设计合理的跟踪算法实现精确跟踪。目前,许多滤波算法已被广泛应用,比如概率假设密度滤波器(Probabilityhypothesis density,PHD)用于多点目标跟踪,扩展目标高斯混合PHD滤波器(Extendedtarget Gaussian mixture PHD filter,ET-GM-PHD)用于多扩展目标跟踪。虽然ET-GM-PHD滤波器能在杂波和漏检环境下准确估计多个扩展目标的个数以及状态,但是它忽略了扩展目标的扩展形态建模,无法同时估计多个扩展目标的扩展形态,并且无法有效处理扩展目标的复杂机动行为,不能满足实际需求。
一般而言,滤波算法是一种框架结构,包含了预测、更新等步骤。若要实现对不同类型目标的精确定位或跟踪,需要针对所跟踪扩展目标以及实际跟踪场景,对滤波框架和步骤进行调整和改进,甚至提出一套新的技术方法。例如当多个星凸型扩展目标机动时,发生机动的星凸型扩展目标个数通常未知,且目标的运动模型未知。这大大增加了跟踪多个星凸型扩展目标的难度。为处理这种复杂的机动行为,交互型多模型方法是一个有效的解决方法,该方法列举了所有可能的机动模型,并列运行与可能机动模型匹配的模型条件滤波器,然后将各个滤波器的输出结果融合作为最终的估计结果。然而,由于该方法中模型条件滤波以及模型概率更新公式仅适用于单点机动目标跟踪,无法跟踪多机动星凸型扩展目标。为此,如何根据现有的方法以及多扩展目标复杂机动问题提出一套适用于复杂机动下的多星凸型扩展目标跟踪算法是目前多扩展目标跟踪技术中的一个难点。
目前需要本领域技术人员迫切解决的一个技术问题是:在多个星凸型扩展目标机动时如何有效地处理机动模型不确定性,实现机动多星凸型扩展目标个数以及目标质心状态和扩展形态的联合估计。
发明内容
为了解决现有技术中的不足,本发明提供一种转弯机动下的多星凸型扩展目标跟踪方法,在原始交互式多模型跟踪框架中,推导得到适用于扩展目标的模型概率计算公式,并将基于随机超曲面的ET-GM-PHD滤波器作为模型条件滤波器,有效地处理了多个星凸型扩展目标机动模型未知且时变的问题,并实现了多个星凸型扩展目标个数及状态的联合估计,同时通过改进模型概率以及高斯混合项中形态参数的合并步骤,使本发明的方法在多个星凸型扩展目标机动模型不确定情况下取得了准确的扩展形态估计。
为了实现上述目的,本发明采用的具体方案为:一种转弯机动下的多星凸型扩展目标跟踪方法,包括如下步骤:
S1、利用前一时刻估计得到的目标后验强度函数得到每个模型条件滤波器的预测强度;
S2、计算每个机动模型的混合概率,利用混合概率和预测强度计算每个模型条件滤波器的重初始化强度;
S3、获取多星凸型扩展目标的量测数据,利用非线性近似方法计算每个模型条件滤波器中由量测数据更新后的后验强度函数;
S4、对于每个模型条件滤波器,计算其后验强度函数中每个高斯混合项对应的模型概率;
S5、利用模型概率融合模型条件滤波器的后验强度,得到融合后验强度函数;
S6、对融合后验强度函数中的高斯混合项进行删除、合并,得到最终估计结果;
S7、根据融合后验强度函数中删除与合并的高斯混合项序号,对每个模型条件滤波器的后验强度函数中的高斯混合项进行删除合并,得到每个模型条件滤波器的输出结果;
S8、融合模型概率,得到与最终结果对应的模型概率。
进一步地,S1中,对于模型m
Q
其中,N(ξ;m,P)表示变量ξ服从均值为m、协方差为P的正态分布;
进一步地,S2中计算各个模型条件滤波器重初始化强度的具体方法为:
其中r表示模型m
进一步地,S3中利用非线性近似方法获得由量测数据更新后的后验强度函数的方法为::
S3.11、根据均值
其中,l=1,…,n;λ是尺度参数;
S3.12、计算上述采样点经过星凸型扩展目标的非线性量测方程映射后的值:
其中h
S3.13、计算量测预测
S3.14、根据上述计算结果,利用获得的量测数据,计算与模型m
其中
S3.15、对于与模型m
其中
进一步地,S4中,对于与模型m
其中
进一步地,S5中利用模型概率计算融合后验强度函数
进一步地,S6中对融合后验强度函数中高斯混合项的删除合并方法为:
S6.11、将权重小于删除阈值η
S6.12、在余下的高斯混合项中,若高斯混合项之间的距离小于合并阈值η
进一步地,S6中均值中的形态参数的合并方法为:
S6.21、对于系数为
S6.22、计算每个角度上合并后的径向函数
R(θ)=[1,cos(θ),sin(θ),...,cos(N
其中角度θ=0,1,2,3…,2π;R(θ)为径向函数经过傅里叶级数展开后的三角函数向量。
S6.23、根据合并后的径向函数在每个角度上的值,利用最小二乘法拟合径向函数的系数,即为合并后的形态参数。
进一步地,S7中,对于与模型m
S7.11、根据融合后验强度函数中所删除高斯混合项的序号
S7.12、根据融合后验强度函数中待合并高斯混合项系数
S7.13、根据融合后验强度函数中待合并高斯混合项序号
作为一种优选方案,S8中融合与系数
有益效果:本发明针对转弯机动下的多星凸型扩展目标的复杂机动行为,设计了一种完整、有效的多星凸型扩展目标跟踪算法,能在多星凸型扩展目标存在复杂转弯机动时获得比传统非机动跟踪算法更加准确的目标质心动态、扩展形态以及个数估计结果;尤其当多个扩展目标同时发生不同的转弯机动时,本发明能够准确估计多个扩展目标的形状以及朝向,对空中作战指挥具有重要的意义。
附图说明
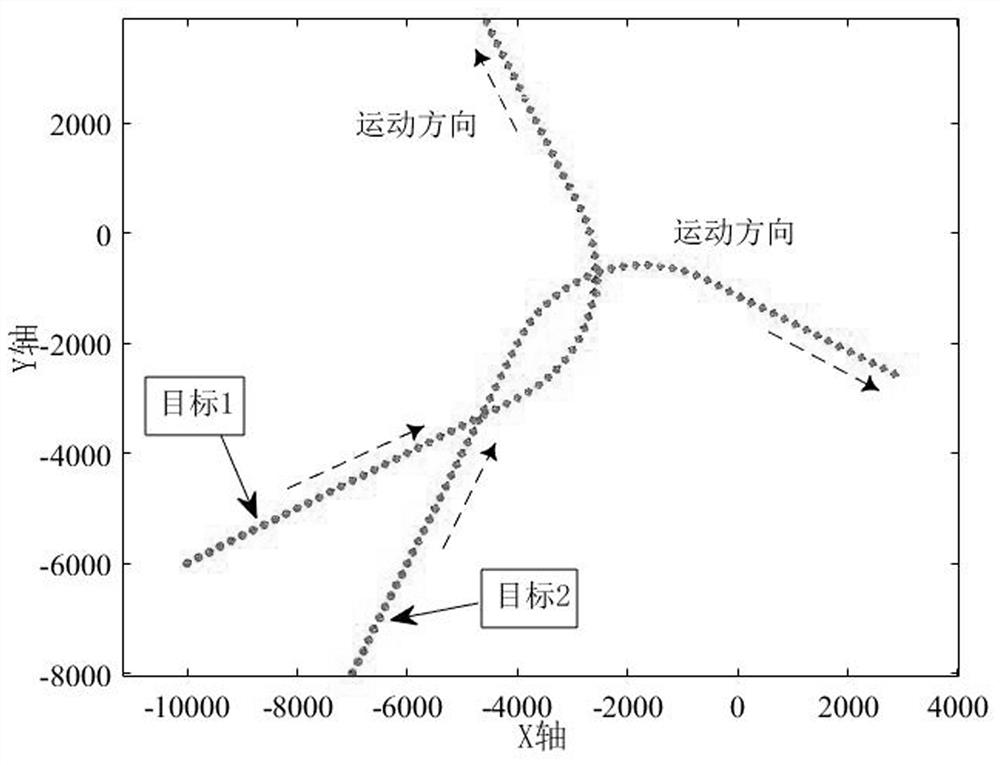
图1是仿真实验中多星凸型扩展目标的轨迹图;
图2是仿真实验中目标1在仿真时刻k=1~30内做匀速直线运动时的部分仿真时刻形态估计结果放大图;
图3是仿真实验中目标1在仿真时刻k=31~48内做匀速左转弯运动时的部分仿真时刻形态估计结果放大图;
图4是仿真实验中目标1在仿真时刻k=49~66内做匀速直线运动时的部分仿真时刻形态估计结果放大图;
图5是仿真实验中目标2在仿真时刻k=1~30内做匀速直线运动时的部分仿真时刻形态估计结果放大图;
图6是仿真实验中目标2在仿真时刻k=31~48内做匀速左转弯运动时的部分仿真时刻形态估计结果放大图;
图7是仿真实验中目标2在仿真时刻k=49~66内做匀速直线运动时的部分仿真时刻形态估计结果放大图;
图8是仿真实验中本发明的OSPA(最优子模式指派度量)距离图。
具体实施方式
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
一种转弯机动下的多星凸型扩展目标跟踪方法,包括步骤S1至S8。
S1、对于每个模型条件滤波器,其前一时刻的输出作为当前时刻的目标状态初始化,并且计算得到扩展目标的预测强度函数。
与模型m
Q
其中D
S2、计算每个模型条件滤波器的重初始化结果。
与模型m
其中r表示模型m
S3、获取多扩展目标的量测数据,采用非线性近似方法计算每个模型条件滤波器中由量测更新后的后验强度函数。
使用非线性近似方法计算与模型m
S3.11、根据均值
其中,l=1,…,n;λ是尺度参数;
S3.12、计算上述采样点经过星凸型扩展目标的非线性量测方程映射后的值:
其中h
S3.13、计算量测预测
S3.14、根据上述计算结果,利用获得的量测数据,计算与模型m
其中
S3.15、对于与模型m
其中
S4、计算每个模型条件滤波器中高斯混合项对应的模型概率。
计算与模型m
其中
S5、计算融合后验强度函数
利用模型概率计算融合后验强度函数的方法为:
S6、删除、合并融合后验强度函数中的高斯混合项,得到最终的估计结果。
对融合后验强度函数中的高斯混合项进行删除、合并的方法为S6.11至S6.14。
S6.11、将权重小于删除阈值η
S6.12、在余下的高斯混合项中,若高斯混合项之间的距离小于合并阈值η
S6.13、对于待合并的高斯混合项,通过形态参数计算每个角度上合并后的径向函数
R(θ)=[1,cos(θ),sin(θ),...,cos(N
其中角度θ=0,1,2,3…,2π;R(θ)为径向函数经过傅里叶级数展开后的三角函数向量。
S6.14、根据合并后的径向函数在每个角度上的值,利用最小二乘法拟合径向函数的系数,所求系数即为合并后的形态参数。
S7、根据融合后验强度函数中删除与合并的高斯混合项序号,对每个模型条件滤波器的后验强度函数进行删除、合并,得到每个模型条件滤波器的估计结果。
对与模型m
S7.11、根据融合后验强度函数中所删除高斯混合项的序号
S7.12、根据融合后验强度函数中待合并高斯混合项系数
S7.13、根据融合后验强度函数中待合并高斯混合项序号
S8、融合模型概率,得到与最终结果相对应的模型概率。
融合序号与
以下通过仿真实验对本发明的效果进行验证,仿真实验设置了在杂波和漏检情况下两个星凸型扩展目标以不同的转弯率交叉运行的跟踪场景。目标1与目标2在仿真时刻k=1~30以及k=49~66内做匀速直线运动,在仿真时刻k=31~48内分别做匀速左转弯运动和匀速右转弯运动。两个星凸型扩展目标扩展形态均初始化为具有相同半径的圆。由于目前没有能同时评估多个扩展目标形态估计的指标,因此通过对比2个星凸型扩展目标在3个不同时间段内目标扩展形态估计与真实扩展形态来展示本发明在星凸型扩展目标形态估计上的性能。
参考附图1-8,其中图1是仿真实验中多星凸型扩展目标的轨迹图;图2-4分别是目标1在三个不同时间段内部分仿真时刻的扩展形态估计结果放大图,图5-7分别是目标2在三个不同时间段内部分仿真时刻的扩展形态估计结果放大图,其中,无填充轮廓线图形表示由本发明所提出的方法得到的目标扩展形态估计,灰色填充形状表示真实目标扩展形态;图8是用于联合评估目标个数和质心位置的最优子模式指派度量(OSPA)图;图1-7中的横坐标和纵坐标均分别表示笛卡尔坐标系的X轴和Y轴,图8中的横坐标为仿真时刻(Simulation step,共66个时刻),图8的纵坐标为最优子模式指派度量(OSPA)。
结合图2至8可以看出,本发明能从初始形态(即圆)开始逐渐得到与真实扩展形态非常贴近的形态估计结果,并且获得准确的目标个数以及质心位置,尤其在两个星凸型扩展目标同时发生机动时,本发明仍能获得准确的扩展形态(包含形状、朝向等)估计结果,OSPA距离(OSPA距离越小,目标位置和个数估计结果越准确)亦维持较小的数值。这是因为本发明通过调整滤波顺序,将基于随机超曲面的ET-GM-PHD滤波器作为模型条件滤波器嵌入到多模型算法中,并推导符合星凸型扩展目标的模型概率计算公式以及合并步骤,有效地处理了多星凸型扩展目标机动模型的不确定问题,实现了多个星凸型扩展目标个数、动态参数以及形态参数的联合估计。另外,本发明充分考虑星凸型扩展目标的形态参数在合并步骤中的几何意义,通过合并待合并高斯混合项在每个角度上径向函数值,利用最小二乘法求得合并后径向函数的系数(即合并后的形态参数),极大地提高了多机动星凸型扩展目标的扩展形态估计精度。
综上,本发明通过调整基于随机超曲面的ET-GM-PHD滤波器以及交互型多模型方法的步骤,将基于随机超曲面的ET-GM-PHD滤波器作为模型条件滤波器嵌入到交互型多模型框架中,得到适用于扩展目标的模型概率更新公式以及模型概率的合并步骤,并充分考虑形态参数的几何意义,提出适用于星凸型扩展目标的形态参数合并步骤,有效处理了多星凸型扩展目标的机动模型不确定性,极大地提高了多星凸型扩展目标在复杂机动行为下的扩展形态估计性能,能有效地处理多星凸型扩展目标的复杂机动行为,实现目标个数、动态参数以及形态参数的联合估计,即便在多个星凸型扩展目标同时机动时,仍能获得较高的目标个数、动态参数以及形态参数估计性能。
对所公开的实施例的上述说明,使本领域专业技术人员能够实现或使用本发明。对这些实施例的多种修改对本领域的专业技术人员来说将是显而易见的,本文中所定义的一般原理可以在不脱离本发明的精神或范围的情况下,在其它实施例中实现。因此,本发明将不会被限制于本文所示的这些实施例,而是要符合与本文所公开的原理和新颖特点相一致的最宽的范围。
- 一种转弯机动下的多星凸型扩展目标跟踪方法
- 星凸模型下的势概率假设密度多扩展目标跟踪方法