塑料去黄剂、塑料去黄剂的制备方法及使用方法
文献发布时间:2023-06-19 11:37:30
技术领域
本发明属于塑料制备领域,具体涉及一种塑料去黄剂、塑料去黄剂的制备方法及使用方法。
背景技术
塑料在不添加任何助剂的时候是无色透明状,有些为了能够看着好看才会添加各种颜料使其变成五颜六色,但是透明塑料的应用领域要比其他颜色的塑料广,但是塑料不可能一直保持着透明状,相比较其他颜色的塑料而言,透明塑料是塑料种类中上等的,没有掺杂任何杂质,应用的范围比较广泛。由于没有掺杂多种东西,安全性较高,所以透明塑料就会应用在食品包装,纯净水瓶甚至医药包装。在透明塑料制品的生产过程是需要在高温、高压的状态下生产而成,经过多次加工塑料原本的分子结构就会出现变化,塑料制品加工时易分解脱氯化氢,并产生阿利共振,形成共轭双键,数量达7个以上共轭双键时就出现黄光,从而出现泛黄的现象。特别在透明塑料制品中,这种黄光严重影响产品的外观,甚至会影响产品的销售,给厂家造成不必要的损失。透明塑料就会出现轻微的黄色,那就需要添加塑料除黄剂来增加去除黄色,使其再次变成无色透明状。生产实践中亟待解决的技术问题是,塑料生产中能够去除透明塑料的黄光,并且不会影响塑料的安全性。
发明内容
本发明的目的在于提供一种塑料去黄剂、塑料去黄剂的制备方法及使用方法,塑料去黄剂是通过将损坏的分子结构修复到正常来消除塑料中的黄光,同时保护塑料在高温高压中不会再次破坏,用在透明塑料中不会影响其安全性,能够将塑料中的黄光完全去除。
为实现上述目的,本发明采用如下技术方案:
一种塑料去黄剂,包括A组分和B组分,A组分包括以下重量份的原料:环氧树脂10-15份、聚二甲基硅氧烷10-15份、甲基苯基硅氧烷支链型预聚物13-20份、碳酸钙13-20份、硅微粉20-26份、氧化锌10-15份、三硬脂酸甘油酯17-26份;组分B包括以下重量份的原料:硅烷偶联剂1.5-2份、咪唑金属盐络合物1.5-2份、胺类交联剂1.5-2份。
进一步,所述咪唑金属盐络合物为咪唑Cu2+络合物。
进一步,所述的咪唑金属盐络合物为CuBr2(2-MeIm)4或CuCl2(Im)4。
进一步,所述的胺类交联剂为二亚乙基三胺或三亚乙基四胺。
一种塑料去黄剂的制备方法,包括步骤,
(1)将甲基苯基硅氧烷支链型预聚物、环氧树脂、聚二甲基硅氧烷,按照比例混合后加入搅拌罐中搅拌5-10min;
(2)将碳酸钙、硅微粉、氧化锌、三硬脂酸甘油酯按照比例混合均匀,然后加入破碎搅拌设备中进行破碎搅拌30-45min;
(3)再向步骤(1)和步骤(2)得到的混合物中依次加入硅烷偶联剂、胺类交联剂、咪唑金属盐络合物,然后进行混合,冷冻干燥后制得塑料去黄剂产品。
进一步,所述的破碎搅拌设备包括操控台与破碎搅拌组件,所述操控台上端设置有混合腔,所述混合腔四周设置有定子组件,所述操控台上端设置有外壳框,所述外壳框上端设置有移动平台,所述移动平台下端设置有微调控制机组,所述微调控制机组内设置有转速极限控制齿轮箱,所述破碎搅拌组件设置在微调控制机组下端,所述破碎搅拌组件包括主转轴,所述主转轴下端设置有可转动连接环,所述可转动连接环连接有破碎锤,所述破碎锤外表面设置有搅拌环,所述搅拌环内设置有转子块,所述的移动平台设置水平的十字形导槽,所述的移动平台与微调控制机组的具体连接是微调控制机组的顶部连接滑动轮,滑动轮的顶部可滑动设置在移动平台的导槽内,所述移动平台的导槽内还固定有若干力传感器,所述的若干力传感器连接一个控制电路,所述的定子组件采用若干电磁线圈组成,所述的定子组件也电连接控制电路,所述的微调控制机组采用微型电机,所述的微调控制机组也电连接控制电路,所述的控制电路用于通过力传感器采集动态控制过程中的力学数据并还用于动态调整微调控制机组/定子组件的工作模式。
进一步,所述的“将碳酸钙、硅微粉、氧化锌、三硬脂酸甘油酯按照比例混合均匀,然后加入破碎搅拌设备中进行破碎搅拌”具体是,将碳酸钙、硅微粉、氧化锌、三硬脂酸甘油酯按照比例混合均匀之后加入到混合腔内,然后控制电路通过力传感器采集动态控制过程中的力学数据,然后控制电路同步控制微调控制机组和定子组件,使得微调控制机组和定子组件按照工作模式工作,所述的工作模式包括通过定子组件驱动具有多个转子块的破碎锤水平移动,包括通过定子组件驱动具有多个转子块的破碎锤转动,还包括通过微调控制机组驱动具有多个转子块的破碎锤转动。
进一步,所述的工作模式还包括通过调整转速极限控制齿轮箱改变“通过微调控制机组驱动具有多个转子块的破碎锤转动”的速度。
进一步,所述的控制电路连接上位机,所述上位机配置人工智能控制系统,所述人工智能控制系统,为每一个工作模式构建独立的或组合的工作效能函数然后利用每一个工作模式构建独立的或组合的工作效能函数中效能特征学习最优化的效能函数配置,通过最优化的效能函数配置指导微调控制机组和定子组件按照工作模式工作。
塑料去黄剂使用方法,塑料颗粒热熔前混料时添加去黄剂,,去黄剂的添加量为塑料颗粒的0.005-0.01%,搅拌10-15min混合均匀。
有益效果
本申请适用于PVC、PE、PP、热塑性塑料以及热固性塑料、聚酯纤维等产品加工出现的黄光以及后期容易泛黄耐候性差的问题。在具体产品的效果上,本申请的去黄效果专门针对于塑料制品生产加温过程中出现的黄光,首先通过修复分子结构作用结构,同时通过光学原理“三原色”互补消除黄光,具体的,塑料颗粒热熔前混料时添加去黄剂,热熔过程中,硅烷偶联剂、碳酸钙、硅微粉、氧化锌、三硬脂酸甘油酯共同与塑料颗粒作用,增加塑料颗粒的韧性,使得环氧树脂、聚二甲基硅氧烷参与塑料颗粒的内部结构,升温过程中聚二甲基硅氧烷在胺类交联剂的作用下交联接枝,初步修复断裂的高分子链,本申请通过固化反应,修复断裂的高分子结构,并且咪唑Cu2+络合物为蓝色金属络合物,通过适配剂量可以起到防黄且具有让人舒适蓝光存在,不同于群青的压黄效果。并且,本申请通过环氧树脂、聚二甲基硅氧烷与甲基苯基硅氧烷支链型预聚物混合,甲基苯基硅氧烷支链型预聚物形成高温保护膜,避免储存过程中温度过高提前交联化,并且通过甲基苯基硅氧烷支链型预聚物的加入还可以解决塑料制品耐候性差的问题。在具体产品的制备上,本申请提供了塑料去黄剂制备方法,而且,进一步,提供了制备方法中的破碎搅拌设备,并且在制备的工作过程中,本申请可以为破碎搅拌工作提供多种多样的工作模式,可以具体调整破碎搅拌工作的动态过程以及能够实现精细化的破碎搅拌工作,可以直接提高本申请制备产品的效果。而且,本申请还可以借助人工智能或人工智能的云计算进行最优化的效能函数配置学习,并且通过这种最优化的效能函数配置提高前述工作的效能,这样也可以直接提高本申请制备产品的应用效果。
附图说明
图1是本申请塑料去黄剂的制备方法中使用的破碎搅拌设备的实施例结构示意图;
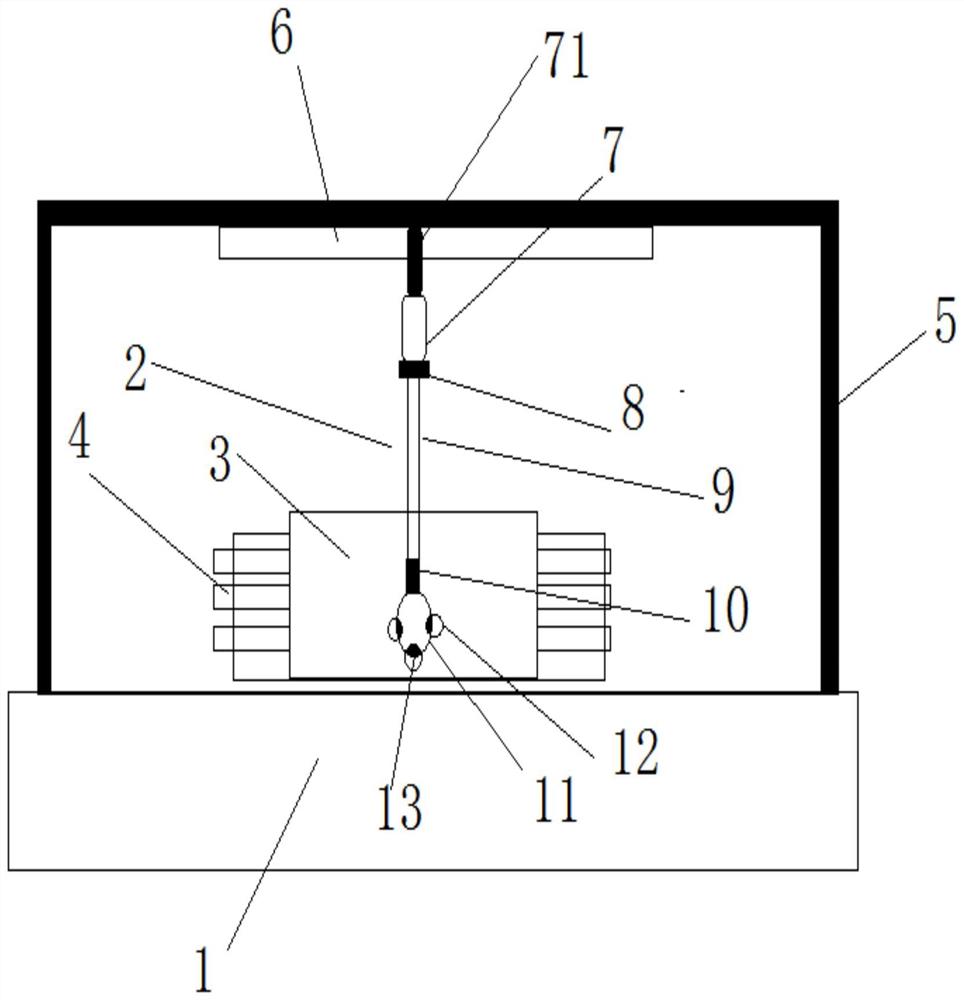
图2是本申请塑料去黄剂的制备方法中使用的破碎搅拌设备的实施例部分结构示意图,并且具体是图1的俯视图。
具体实施方式
以下结合具体实施例,对本发明进一步说明。以下实施例仅用于说明本发明而非用于限制本发明的范围。
在具体实施中,本申请的一种塑料去黄剂,包括A组分和B组分,A组分包括以下重量份的原料:环氧树脂10-15份、聚二甲基硅氧烷10-15份、甲基苯基硅氧烷支链型预聚物13-20份、碳酸钙13-20份、硅微粉20-26份、氧化锌10-15份、三硬脂酸甘油酯17-26份;组分B包括以下重量份的原料:硅烷偶联剂1.5-2份、咪唑金属盐络合物1.5-2份、胺类交联剂1.5-2份。
在优选的实施例中,所述咪唑金属盐络合物为咪唑Cu2+络合物。
在优选的实施例中,所述的咪唑金属盐络合物为CuBr2(2-MeIm)4或CuCl2(Im)4。在优选的实施例中,所述的胺类交联剂为二亚乙基三胺或三亚乙基四胺。
本申请适用于PVC、PE、PP、热塑性塑料以及热固性塑料、聚酯纤维等产品加工出现的黄光以及后期容易泛黄耐候性差的问题。
本申请的去黄效果专门针对于塑料制品生产加温过程中出现的黄光,首先通过修复分子结构作用结构,同时通过光学原理“三原色”互补消除黄光,具体的,塑料颗粒热熔前混料时添加去黄剂,热熔过程中,硅烷偶联剂、碳酸钙、硅微粉、氧化锌、三硬脂酸甘油酯共同与塑料颗粒作用,增加塑料颗粒的韧性,使得环氧树脂、聚二甲基硅氧烷参与塑料颗粒的内部结构,升温过程中聚二甲基硅氧烷在胺类交联剂的作用下交联接枝,初步修复断裂的高分子链,并且通过实验发现,聚二甲基硅氧烷的加入还能提高材料的抗拉强度,咪唑金属盐络合物加热到120℃以上时可以解离咪唑络合物,从而和环氧树脂发生固化反应,修复断裂的高分子结构,并且咪唑Cu2+络合物为蓝色金属络合物,通过适配剂量可以起到防黄且具有让人舒适蓝光存在,不同于群青的压黄效果。
并且,本申请通过环氧树脂、聚二甲基硅氧烷与甲基苯基硅氧烷支链型预聚物混合,甲基苯基硅氧烷支链型预聚物形成高温保护膜,避免储存过程中温度过高提前交联化,并且通过甲基苯基硅氧烷支链型预聚物的加入还可以解决塑料制品耐候性差的问题。
在一种具体的优选实施中,本申请的一种塑料去黄剂,包括A组分和B组分,A组分包括以下重量份的原料:环氧树脂12份、聚二甲基硅氧烷12份、甲基苯基硅氧烷支链型预聚物16份、碳酸钙15份、硅微粉21份、氧化锌15份、三硬脂酸甘油酯25份;组分B包括以下重量份的原料:硅烷偶联剂1.75份、咪唑金属盐络合物1.75份、胺类交联剂2份。
在实施中将上述的实施产品作为本申请的实施例a并且,选择对照产品1-5,对PVC、PE、PP随机进行100次加工实验,然后在实验中统计每种产品使用中黄光出现的频次,其中的统计结果如表格1和表格2。
表格1
表格2
经过对统计结果的分析可见,本申请的实施例a产品的加工中黄光出现频次最大数也低于0.003,其他的对照产品1-5加工中黄光出现频次最大数分别约为0.165、0.199、0.280、0.240、0.309,这说明本申请的去黄光最低有效率为0.997,其他的对照产品1-5去黄光最低有效率分别为0.835、0.801、0.720、0.760、0.691,这说明本申请实施例a产品不仅有效在加工中去黄光而且效果非常优异。
在具体实施中,本申请的塑料去黄剂制备方法,包括步骤,
(1)将甲基苯基硅氧烷支链型预聚物、环氧树脂、聚二甲基硅氧烷,按照比例混合后加入搅拌罐中搅拌5-10min;
(2)将碳酸钙、硅微粉、氧化锌、三硬脂酸甘油酯按照比例混合均匀,然后加入破碎搅拌设备中进行破碎搅拌30-45min;
(3)再向步骤(1)和步骤(2)得到的混合物中依次加入硅烷偶联剂、胺类交联剂、咪唑金属盐络合物,然后进行混合,冷冻干燥后制得塑料去黄剂产品。
如图1-2所示的,所述的破碎搅拌设备,包括操控台1与破碎搅拌组件2,所述操控台1上端设置有混合腔3,所述混合腔3四周设置有定子组件4,所述操控台1上端设置有外壳框5,所述外壳框5上端设置有移动平台6,所述移动平台6下端设置有微调控制机组7,所述微调控制机组7内设置有转速极限控制齿轮箱8,所述破碎搅拌组件2设置在微调控制机组7下端,所述破碎搅拌组件2包括主转轴9,所述主转轴9下端设置有可转动连接环10,所述可转动连接环10连接有破碎锤11,所述破碎锤11外表面设置有搅拌环12,所述搅拌环12内设置有转子块13,所述的移动平台6设置水平的十字形导槽,所述的移动平台6与微调控制机组7的具体连接是微调控制机组7的顶部连接滑动轮71,滑动轮71的顶部可滑动设置在移动平台6的导槽内,所述移动平台6的导槽内还固定有若干力传感器61,所述的若干力传感器61连接一个控制电路,所述的定子组件4采用若干电磁线圈组成,所述的定子组件4也电连接控制电路,所述的微调控制机组7采用微型电机,所述的微调控制机组7也电连接控制电路,所述的控制电路用于通过力传感器61采集动态控制过程中的力学数据并还用于动态调整微调控制机组7/定子组件4的工作模式。
在实施中,所述的转子块13采用永磁块,所述的定子组件4采用若干电磁线圈组成,通过控制电磁线圈中的电流变化使其形成交变磁场,然后通过改变交变磁场可以控制转子块13的位置变化,实际是使得转子块13与交变磁场之间产生变化的磁力作用,通过这样可以实际控制具有多个转子块13的破碎锤11绕可转动连接环10旋转,也可以控制具有多个转子块13的破碎锤11及其上部的可转动连接环10、主转轴9、转速极限控制齿轮箱8、微调控制机组7等机构水平移动,在这种情况中交变磁场产生的作用力使得滑动轮71沿着移动平台6的力传感器61向一侧移动,这样就可以改变破碎锤11及其周围的机构相对混合腔3内壁的位置,所以实施中,破碎锤11既可以转动,还可以水平移动,当破碎锤11转动或者水平移动过程中其外部的搅拌环12均可以对3内的物料进行破碎和搅拌。
在实施中为了精准控制破碎锤11的转动速度的调整精准,微调控制机组7和转速极限控制齿轮箱8则可以启动,在实施中,微调控制机组7的转速控制范围与定子组件4对破碎锤11转速控制的范围差别很大,这样在定子组件4对破碎锤11有了基础的转速控制基础上还可以通过微调控制机组7进一步的微控制调整11的转速,实际上可以增加破碎锤11转速的调整精度,另外为了修改微调控制机组7的转速控制范围,实施中还可以通过改变转速极限控制齿轮箱8的控制或者直接更换转速极限控制齿轮箱8来实现,实施中所述的转速极限控制齿轮箱8可以通过齿轮组构成,其主要作用是改变转速的控制范围,进一步提高转速的可控精度。
实施中,“将碳酸钙、硅微粉、氧化锌、三硬脂酸甘油酯按照比例混合均匀,然后加入破碎搅拌设备中进行破碎搅拌”的步骤会重点影响本申请制备产品的效能,所以重点控制“将碳酸钙、硅微粉、氧化锌、三硬脂酸甘油酯按照比例混合均匀,然后加入破碎搅拌设备中进行破碎搅拌”的步骤项目。
所述的“将碳酸钙、硅微粉、氧化锌、三硬脂酸甘油酯按照比例混合均匀,然后加入破碎搅拌设备中进行破碎搅拌”具体是,将碳酸钙、硅微粉、氧化锌、三硬脂酸甘油酯按照比例混合均匀之后加入到混合腔3内,然后控制电路通过力传感器61采集动态控制过程中的力学数据,然后控制电路同步控制微调控制机组7和定子组件4,使得微调控制机组7和定子组件4按照工作模式工作,所述的工作模式包括通过定子组件4驱动具有多个转子块13的破碎锤11水平移动,包括通过定子组件4驱动具有多个转子块13的破碎锤11转动,还包括通过微调控制机组7驱动具有多个转子块13的破碎锤11转动。在实施中,通过控制具有多个转子块13的破碎锤11转动或水平移动来直接完成破碎搅拌的工作,在工作过程中,破碎锤11转动中其上的搅拌环12可以将碳酸钙、硅微粉、氧化锌、三硬脂酸甘油酯物料进行搅拌,并且在高速搅拌中以及在破碎锤11快速移动中可以对物料打击进行破碎操作,通过这些动作的结合共同完成“破碎搅拌设备中进行破碎搅拌”的工作。所以在制备的工作过程中,本申请可以为破碎搅拌工作提供多种多样的工作模式,并且可以具体调整破碎搅拌工作的动态过程以及能够实现精细化的破碎搅拌工作。实施中可以直接提高本申请制备产品的效果。
在更加具体的实施中,所述工作模式还包括通过调整转速极限控制齿轮箱8改变“通过微调控制机组7驱动具有多个转子块13的破碎锤11转动”的速度。
所以在具体的实施中,本申请具有多种独立的或组合的工作模式,也具有多种独立的或组合的工作模式效果,当然其中的个别组合的工作模式是有机结合的,也即可以直接实现1+1大于2的创造性效果。
在更具体的实施中,所述的控制电路连接上位机,所述上位机配置人工智能控制系统,所述人工智能控制系统,为每一个工作模式构建独立的或组合的工作效能函数然后利用每一个工作模式构建独立的或组合的工作效能函数中效能特征学习最优化的效能函数配置,通过最优化的效能函数配置指导微调控制机组7和定子组件4按照工作模式工作。这样本申请就可以借助人工智能或人工智能的云计算进行最优化的效能函数配置学习,并且通过这种最优化的效能函数配置提高前述工作的效能,这样也可以直接提高本申请制备产品的应用效果。
本申请不具体公开“为每一个工作模式构建独立的或组合的工作效能函数然后利用每一个工作模式构建独立的或组合的工作效能函数中效能特征学习最优化的效能函数配置,通过最优化的效能函数配置指导微调控制机组7和定子组件4按照工作模式工作”对应的人工智能算法过程,为了充分说明该方案的科学性,则举例说明:在上述人工智能控制系统的具体实现与搭建上,实际可以参考现有技术中的部分内容,比如,中国发明申请CN201910399868.6公开的基于人工智能和多传感器的监测装置,在该技术中是基于多传感器的监测并且实际也是为了配置以实现“提前预报可能的灾害,进而减轻事故的危害”,实际上该技术也是基于多种工作模式(多传感器的测试参数及其组合)以需求最优化的效能(能够减轻事故的危害的最好的方案)的人工智能算法,所以在具体的系统单元组成上,以及单元的学习特征的数据格式表达、特征提取、特征学习和优化等过程中该技术的人工智能算法可以应用到本申请的需要。
另外,本申请还公开了,上述的,塑料去黄剂的使用方法:塑料颗粒热熔前混料时添加去黄剂,去黄剂的添加量为塑料颗粒的0.005-0.01%,搅拌10-15min混合均匀。
- 塑料去黄剂、塑料去黄剂的制备方法及使用方法
- 一种黄腐酸滋润去屑洗发剂及其制备方法