一种浮力调节式海洋养殖网箱
文献发布时间:2023-06-19 11:42:32
技术领域
本发明实施例涉及海洋养殖网箱技术领域,尤其涉及一种浮力调节式海洋养殖网箱。
背景技术
海洋养殖是水产业的重要组成部分。海洋养殖网箱养殖具有投资少、产量高、可机动以及见效快等特点。
目前的海洋养殖网箱缺乏浮力调节功能,其在投入海水后浮力主要由本身的制造结构决定,例如所设置的浮子的数量,是固定而不可调节的,因此将其投入海洋进行养殖生产时,仅能够投入浅海、滩涂、港湾、围塘等浅水海域进行海水养殖,以确保养殖物种的存活条件,而不利于投入深水海域进行深海养殖,深海养殖需基于海洋养殖网箱的浮力调节确保养殖物种在深水海域的存活条件。
发明内容
本发明实施例提供一种浮力调节式海洋养殖网箱,以实现海洋养殖网箱的浮力调节及深海养殖。
本发明实施例提供了一种浮力调节式海洋养殖网箱,所述海洋养殖网箱包括:
水面控制单元,用于接收外部控制信号,并对所述海洋养殖网箱进行控制;
水下控制单元,与所述水面控制单元连接;所述水下控制单元用于接收所述水面控制单元发送的控制信号,以及获取所述海洋养殖网箱的浮力参数信号,生成浮力调节信号;其中,所述浮力参数信号包括所述海洋养殖网箱所处区域内海水的海水密度信号、海水含氧量信号、海水温度信号以及海水压力信号中的至少一个;
浮力调节单元,与所述水下控制单元连接;所述浮力调节单元用于接收所述浮力调节信号,调节其自身的工作状态,以调节所述海洋养殖网箱的浮力。
可选地,所述浮力调节单元包括:
水箱,所述水箱包括进气口和排水口;所述进气口和所述排水口上分别设置有阀门;所述阀门与所述水下控制单元连接;所述阀门用于在所述水下控制单元的控制下打开或关闭,以对所述海洋养殖网箱的浮力进行调节;
通气管道,所述通气管道的一端与所述进气口连接;所述水面控制单元还用于生成气体;所述通气管道的另一端与所述水面控制单元连接,所述通气管道用于接收所述水面控制单元输送的气体。
可选地,所述水下控制单元用于根据所述浮力调节信号控制所述排水口的阀门打开且所述进气口的阀门打开以调节所述海洋养殖网箱的浮力至增大;或者,
控制所述排水口的阀门关闭且所述进气口的阀门关闭以调节所述海洋养殖网箱的浮力至减小。
可选地,还包括:视频巡检单元,所述视频巡检单元与所述水面控制单元连接;所述视频巡检单元用于接收所述水面控制单元发送的控制信号,并获取所述海洋养殖网箱的周边环境视频资料。
可选地,所述视频巡检单元包括:
数据处理模块,与所述水面控制单元连接;所述数据处理模块用于接收所述水面控制单元发送的控制信号,并生成采集信号和移动信号;
图像采集模块,与所述数据处理模块连接;所述图像采集模块用于接收所述采集信号,并根据所述采集信号采集所述海洋养殖网箱的周边环境图片资料
电机控制模块,与所述数据处理模块连接;所述电机控制模块用于接收所述移动信号,并根据所述移动信号控制所述视频巡检单元移动。
可选地,所述水面控制单元包括:
显示模块,与所述数据处理模块连接;所述显示模块用于接收所述周边环境视频资料,并视频展示所述周边环境视频资料。
可选地,所述视频巡检单元还包括:
密封保护壳;所述数据处理模块、所述图像采集模块以及所述电机控制模块均设置于所述密封保护壳内。
可选地,还包括:
能源单元,与所述水面控制单元连接;所述能源单元用于向所述水面控制单元和所述水下控制单元供电。
可选地,所述能源单元包括:
光伏发电模块、无线充电模块以及至少一个电池组;所述光伏发电模块和所述无线充电模块均与所述至少一个电池组连接,所述光伏发电模块和所述无线充电模块均用于对所述至少一个电池组充电。
可选地,所述能源单元还包括:
BMS模块,与所述至少一个电池组连接;所述BMS模块用于控制所述光伏发电模块和/或所述无线充电模块对所述至少一个电池组充电或者不充电,以及用于采集所述电池组的运行状态数据;
主控制器模块,分别与所述BMS模块和所述水面控制单元连接;所述主控制器模块用于接收所述水面控制单元的控制信号,生成逆变启动信号,以及向所述BMS模块发送控制信号,并将所述运行状态数据发送至所述水面控制单元。
变压整流模块,分别与所述BMS模块和所述主控器模块连接;所述变压整流模块用于接收所述BMS模块发送的控制信号,并根据所述电池组输出的电信号向所述主控制器模块供电;
逆变模块,分别与所述BMS模块和所述主控制器模块连接;所述逆变模块用于接收所述BMS模块发送的控制信号,并根据所述逆变启动信号和所述电池组输出的电信号对所述电池组输出的电信号进行变压。
本发明实施例提供的浮力调节式海洋养殖网箱,通过设置水面控制单元,水面控制单元用于接收外部控制信号,并对海洋养殖网箱进行总控;进而通过设置水下控制单元和浮力调节单元,水下控制单元用于接收水面控制单元发送的控制信号,并获取海洋养殖网箱的浮力参数信号以及生成浮力调节信号,浮力调节单元用于接收浮力调节信号并调节其自身的工作状态,以此调节海洋养殖网箱的浮力。即本实施例通过设置水下控制单元和浮力调节单元,水下控制单元获取浮力参数信号并生成浮力调节信号,浮力调节单元根据浮力调节信号调节自身的工作状态以调节海洋养殖网箱的浮力,以此实现了对海洋养殖网箱的浮力调节,从而有助于实现海洋养殖网箱的深海养殖。
附图说明
图1是本发明实施例提供的一种浮力调节式海洋养殖网箱的结构示意图;
图2是本发明实施例提供的一种浮力调节式海洋养殖网箱的浮力调节单元的结构示意图;
图3是本发明实施例提供的另一种浮力调节式海洋养殖网箱的结构示意图;
图4是本发明实施例提供的一种浮力调节式海洋养殖网箱的视频巡检单元的结构示意图;
图5是本发明实施例提供的另一种浮力调节式海洋养殖网箱的结构示意图;
图6是本发明实施例提供的一种浮力调节式海洋养殖网箱的能源单元的结构示意图。
具体实施方式
下面结合附图和实施例对本发明作进一步的详细说明。可以理解的是,此处所描述的具体实施例仅仅用于解释本发明,而非对本发明的限定。另外还需要说明的是,为了便于描述,附图中仅示出了与本发明相关的部分而非全部结构。
图1是本发明实施例提供的一种浮力调节式海洋养殖网箱的结构示意图,参考图1,所述海洋养殖网箱包括:水面控制单元10,用于接收外部控制信号,并对海洋养殖网箱进行控制;水下控制单元20,与水面控制单元10连接;水下控制单元20用于接收水面控制单元10发送的控制信号,以及获取海洋养殖网箱的浮力参数信号,生成浮力调节信号;其中,浮力参数信号包括海洋养殖网箱所处区域内海水的海水密度信号、海水含氧量信号、海水温度信号以及海水压力信号中的至少一个;浮力调节单元30,与水下控制单元20连接;浮力调节单元30用于接收浮力调节信号,调节其自身的工作状态,以调节海洋养殖网箱的浮力。
具体地,海洋养殖网箱可包括网衣、结构框架、水面平台以及沉子与拉索等,网衣包裹结构框架,水面平台设置于结构框架之上(也即结构框架的顶部),水面平台上可搭建用于调节及控制海洋养殖网箱的软硬件设备,沉子与拉索用于固定海洋养殖网箱。
水面控制单元10可设置于水面平台上。水面控制单元10可由硬件设备以及软件控制设备等构成。水面控制单元10能够与外部控制系统进行通信,例如水面控制单元10包括无线通信单元,水面控制单元10能够通过无线通信单元与岸上的工作人员的控制系统进行无线通信,据此,水面控制单元10能够接收外部的控制信号,并根据接收到的外部控制信号对海洋养殖网箱进行控制,例如控制海洋养殖网箱的运行、停运、工作状态、吃水深度以及浮力大小等。
水下控制单元20可设置于结构框架的底部、腰部或者设置于水面平台上,本实施对此不作限定。水下控制单元20可由硬件设备以及软件控制设备等构成。水下控制单元20与水面控制单元10之间可以通过CAN总线实现通信,此时水面控制单元10中可包括CAN总线协议模块,例如CAN总线协议芯片。水下控制单元20能够在海洋养殖网箱投入深海海域时,根据水面控制单元10发送的控制信号在水下对海洋养殖网箱进行控制,例如,水下控制单元20根据水面控制单元10发出的控制信号获取海洋养殖网箱的浮力参数信号。
海洋养殖网箱的浮力参数信号包括海洋养殖网箱所处区域内海水的海水密度信号、海水含氧量信号、海水温度信号以及海水压力信号中的至少一个。有些养殖物种,例如海水鱼类,它们的细胞膜已经适应了海水,淡水不再满足它们的存活条件,在有淡水洋流流过海洋养殖网箱时,淡水会大量的渗透进它们的细胞中,最终撑破细胞膜导致细胞死亡,水下控制单元20可以采集海洋养殖网箱所处区域内海水的海水密度信号,以便于判断海洋养殖网箱所处区域内是否有淡水洋流。对于养殖物种,生长环境中的含氧量也是其存活条件之一,水下控制单元20可以采集海洋养殖网箱所处区域内的海水含氧量信号,以便于判断海洋养殖网箱所处区域内含氧量的多少。对于养殖物种,生长环境的温度也是其存活条件之一,且不同的养殖物种存活所需的温度高低可能不相同,水下控制单元20可以采集海洋养殖网箱所处区域内的海水温度信号,以便于判断海洋养殖网箱所处区域内的海水温度的高低。对于养殖物种,生长环境的压力也是其存活条件之一,水下控制单元20可以采集海洋养殖网箱所处区域内的海水压力信号,以便于判断海洋养殖网箱所处区域内的压力大小。
水下控制单元20可通过海洋养殖网箱上设置的多个不同种类的传感设备(例如传感器)获取浮力参数信号,水下控制单元20除了对海水密度信号、海水含氧量信号、海水温度信号以及海水压力信号的采集,还可以对其它有关于养殖物种存活条件的参数信号进行采集,对此不作具体限制。
浮力调节信号可以是水下控制单元20根据浮力参数信号生成,也可以是水下控制单元20将浮力参数信号发送至水面控制单元10,水面控制单元10根据浮力参数信号生成浮力调节信号并将浮力调节信号发送至水下控制单元20。根据浮力参数信号生成浮力调节信号可以是:根据浮力参数信号和预先设定的相应参数的阈值或阈值范围生成浮力调节信号。示例性地,水下控制单元20可以根据浮力参数信号和预先设定的相应参数的阈值或阈值范围,在判断到海水密度过大或者过小时、海水含氧量过低、海水温度过高或者过低、和/或海水压力过大或者过小时生成浮力调节信号。
浮力调节单元30可以设置于海洋养殖网箱内部、外围或者水面平台上,本实施例对此不作限定,可选地,将浮力调节单元30设置于海洋养殖网箱内部且靠近海洋养殖网箱的底部。水下控制单元20可由硬件设备以及软件控制设备等构成。浮力调节单元30用于接收浮力调节信号,并根据浮力调节信号调节其自身的工作状态,以调节海洋养殖网箱的浮力。例如,浮力调节单元30根据浮力调节信号调节其自身的工作状态,以使得海洋养殖网箱在深海海域中的浮力增大或者减小。
浮力调节单元30根据浮力调节信号调节自身工作状态而调节海洋养殖网箱的浮力,以此调节了海洋养殖网箱在深海海域所处的位置或者区域,从而使得海洋养殖网箱避开了深海海域中的海水密度过大或者过小时、海水含氧量过低、海水温度过高或者过低、和/或海水压力过大或者过小等位置,确保了养殖物种在深水海域的存活条件。
综上可知,本发明实施例提供的海洋养殖网箱,通过设置水面控制单元10,水面控制单元10与外部控制系统进行通信,并对海洋养殖网箱进行总控;进而通过设置水下控制单元20和浮力调节单元30,水下控制单元20根据水面控制单元10发送的控制信号获取浮力参数信号并根据浮力参数信号生成浮力调节信号,浮力调节单元30根据浮力调节信号调节自身状态以调节海洋养殖网箱的浮力,以此实现了对海洋养殖网箱的浮力调节,从而使得海洋养殖网箱能够基于浮力的变化避开深海海域中的海水密度过大或者过小时、海水含氧量过低、海水温度过高或者过低、和/或海水压力过大或者过小等位置,确保了养殖物种在深水海域的存活条件,有助于实现海洋养殖网箱的深海养殖,此外利用本实施例提供的海洋养殖网箱进行深海养殖时,由于其浮力便于调节,从而在收获及打捞养殖物种时仅需调节海洋养殖网箱的浮力即可使得海洋养殖网箱浮出水面,非常便于养殖物种的收获及打捞。
图2是本发明实施例提供的一种浮力调节式海洋养殖网箱的浮力调节单元的结构示意图,参考图2,可选地,浮力调节单元30包括:水箱31,水箱31包括进气口32和排水口33;进气口32和排水口33上分别设置有阀门34;阀门34与水下控制单元20连接;阀门34用于在水下控制单元20的控制下打开或关闭,以对海洋养殖网箱的浮力进行调节;通气管道35,通气管道35的一端与进气口32连接;水面控制单元10还用于生成气体;通气管道35的另一端与水面控制单元10连接,通气管道35用于接收水面控制单元10输送的气体。
具体地,水面控制单元10中可设置有空压机,空压机能够生成气体。浮力调节单元30可主要由水箱31和通气管道35构成;其中,水箱31上设置有进气口32和排水口33,进气口32和排水口33上分别设置有阀门34,阀门34例如是电磁阀。可参考图1,浮力调节单元30的通气管道35一端与水面控制单元10连接,例如与水面控制单元10中的空压机连接,另一端与水箱31的进气口32连接。
水面控制单元10可以根据接收到的外部控制信号对水下控制单元20发送控制信号,水下控制单元20可以根据水面控制单元10发送的控制信号控制阀门34的打开或者关闭;除此之外,还可以是水下控制单元20通过输出的浮力调节信号控制阀门34的打开或者关闭。
进气口32的阀门34在打开时,通气管道35通过进气口32向水箱31内输送气体;进气口32的阀门34在关闭时,水箱31内的气体通过进气口32排出同时水箱31周围的水(例如水箱31周围的海水)会通过进气口32进入水箱31;排水口33的阀门34在打开时,水箱31内的水通过排水口33排出;排水口33的阀门34在关闭时,水箱31内的水不排出水箱31;因此,浮力调节单元30的阀门34的打开或者关闭时,浮力调节单元30的自身工作状态被调节,即水箱31中水和气体的体积占比被调节而发生了变化,从而实现了海洋养殖网箱的浮力的调节。
本发明实施例提供的海洋养殖网箱包括浮力调节单元30,浮力调节单元30可主要由水箱31和通气管道35构成;其中,水箱31上设置有进气口32和排水口33,进气口32和排水口33上分别设置有阀门34。外部的控制系统可依次通过水面控制单元10以及水下控制单元20控制阀门34的打开或者关闭,或者水下控制单元20通过输出的浮力调节信号控制阀门34的打开或者关闭,使得水箱31中水和气体的体积占比被调节而发生了变化,从而实现了海洋养殖网箱的浮力的调节,浮力调节单元30的构造简单,成本低廉,控制便捷,可靠实用。
继续参考图2,可选地,水下控制单元20用于根据浮力调节信号控制排水口33的阀门34打开且进气口32的阀门34打开以调节海洋养殖网箱的浮力至增大;或者,控制排水口33的阀门34关闭且进气口32的阀门34关闭以调节海洋养殖网箱的浮力至减小。
具体地,水下控制单元20输出浮力调节信号以控制阀门34的打开或者关闭。当水下控制单元20输出浮力调节信号以控制排水口33的阀门34打开且进气口32的阀门34打开时,通气管道35通过进气口32向水箱内输送气体且水箱31内的水通31过排水口33排出,从而水箱31内的气体逐渐增多且水逐渐减小,从而使得海洋养殖网箱的浮力增大;当水下控制单元20输出浮力调节信号以控制控制排水口33的阀门34关闭且进气口32的阀门34关闭,水箱31内的气体通过进气口32排出同时水箱31周围的水会通过进气口32进入水箱31且水箱31内的水不排出水箱31,从而使得海洋养殖网箱的浮力减小。
图3是本发明实施例提供的另一种浮力调节式海洋养殖网箱的结构示意图,参考图3,可选地,海洋养殖网箱还包括视频巡检单元40,视频巡检单元40与水面控制单元10连接;视频巡检单元40用于接收水面控制单元10发送的控制信号,并获取海洋养殖网箱的周边环境视频资料。
具体地,水面控制单元10可以根据接收到的外部控制信号对视频巡检单元40发送控制信号。视频巡检单元40可以根据水面控制单元10发送的控制信号,对海洋养殖网箱所处区域的周边环境视频资料进行获取,并将获取到的周边环境视频资料发送至水面控制单元10,进而水面控制单元10可以将周边环境视频资料发送至外部控制系统;其中,周边环境视频资料包括了海洋养殖网箱所处区域的周围环境的拍摄的视频资料;此外,本实施例对视频巡检单元40在海洋养殖网箱上的设置位置不作限定。本实施例通过设置视频巡检单元40,从而能够获取到海洋养殖网箱所处区域的周围环境的视频资料,以便于对海洋养殖网箱所处区域的周围环境进行实时监测,以助于更精准地对海洋养殖网箱的运行状态进行控制。
可选地,海洋养殖网箱的水面控制单元10包括:显示模块,显示模块与数据处理模块41连接;显示模块用于接收周边环境视频资料,并视频展示周边环境视频资料。
具体地,水面控制单元10中设置显示模块时,可以在水面控制单元10接收到视频巡检单元40发送的周边环境视频资料时对周边环境视频资料进行视频展示,从而便于工作人员直接直观地观测海洋养殖网箱所处区域的周围环境。
图4是本发明实施例提供的一种浮力调节式海洋养殖网箱的视频巡检单元的结构示意图,参考图4,可选地,视频巡检单元40包括:数据处理模块41,与水面控制单元10连接;数据处理模块41用于接收水面控制单元10发送的控制信号,并生成采集信号和移动信号;图像采集模块42,与数据处理模块41连接;图像采集模块42用于接收采集信号,并根据采集信号采集海洋养殖网箱的周边环境图片资料;电机控制模块43,与数据处理模块41连接;电机控制模块43用于接收移动信号,并根据移动信号控制视频巡检单元40移动。
具体地,数据处理模块41能够与水面控制单元10进行通信,例如通过光纤通信,此时视频巡检单元40中可包括光纤协议模块45。数据处理模块41根据水面控制单元10发送的控制信号生成采集信号或者移动信号。
图像采集模块42可包括OV5640摄像头,并且图像采集模块42可以设置在透光的防水外壳中。
视频巡检单元40中可包括多个无刷电机44,例如图4中示例性示意的四个无刷电机44。电机控制模块43可包括三相无刷电机驱动电路,例如可以通过设置的IRF640模块实现三相无刷电机驱动电路,并通过设置的STM8S107模块实现无刷电机驱动电路的控制逻辑。移动信号可以是视频巡检单元40根据水面控制单元10发送的控制信号而生成的脉冲信号,例如是数据处理模块41通过设置的STM32F779模块将水面控制单元10发送的控制信号转换成脉冲信号,例如PWM信号。电机控制模块43根据脉冲信号驱动无刷电机44,从而控制视频巡检单元40移动,以便于视频巡检单元40对海洋养殖网箱所处区域的周围环境的视频资料进行拍摄。
视频巡检单元40中可包括第一变压整流模块46,第一变压整流模块46用于将接收到的220V 50Hz交流电转换为一路24V直流电分别为图像采集模块42、电机控制模块43以及光纤协议模块45供电,并转换为一路5V直流电为数据处理模块41供电,例如通过设置的NDR-240-24模块将单相220V 50Hz交流电转换为24V直流电,通过设置的HLK-PM01模块将单相220V 50Hz交流电转换为5V直流电;其中,第一变压整流模块46接收到的220V 50Hz交流电可由水面控制模块提供。
继续参考图4,可选地,视频巡检单元40还包括:密封保护壳47;数据处理模块41、图像采集模块42以及电机控制模块43均设置于密封保护壳47内。
具体地,数据处理模块41、图像采集模块42、电机驱动模块、光纤模块以及第一变压整流模块46均可以设置在密封保护壳47中,以避免与海水接触,保证视频巡检单元40的正常工作及寿命。
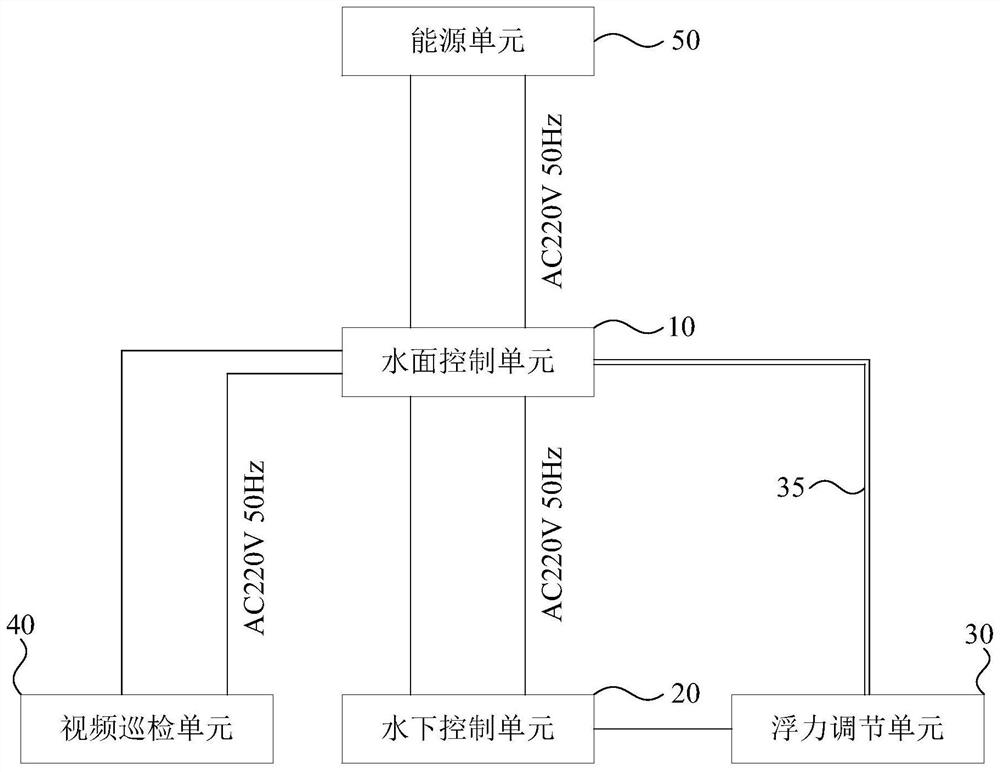
图5是本发明实施例提供的另一种浮力调节式海洋养殖网箱的结构示意图,参考图5,可选地,海洋养殖网箱还包括:能源单元50,与水面控制单元10连接;能源单元50用于向水面控制单元10和水下控制单元20供电。
具体地,能源单元50是整个海洋养殖网箱的动力核心,能够为整个海洋养殖网箱提供所需电力。可以是能源单元50对水面控制单元10提供220V 50Hz交流电,进而水面控制单元10基于能源单元50的供电为水下控制单元20和视频巡检单元40分别提供220V 50Hz交流电。
图6是本发明实施例提供的一种浮力调节式海洋养殖网箱的能源单元的结构示意图,参考图6,可选地,能源单元50包括:光伏发电模块51、无线充电模块52以及至少一个电池组53;光伏发电模块51和无线充电模块52均与至少一个电池组53连接,光伏发电模块51和无线充电模块52均用于对至少一个电池组53充电。
具体地,光伏发电模块51可包括光伏板,例如为3KW-4B太阳能发电系统。无线充电模块52可主要由感应线圈和晶体管实现无线充电功能,例如为10A10整流二极管。
继续参考图6,可选地,能源单元50还包括:BMS模块54,与至少一个电池组53连接;BMS模块54用于控制光伏发电模块51和/或无线充电模块52对至少一个电池组53充电或者不充电,以及用于采集电池组53的运行状态数据;主控制器模块55,分别与BMS模块54和水面控制单元10连接;主控制器模块55用于接收水面控制单元10的控制信号,生成逆变启动信号,以及向BMS模块54发送控制信号,并将运行状态数据发送至水面控制单元10。变压整流模块56,分别与BMS模块54和主控器模块连接;变压整流模块56用于接收BMS模块54发送的控制信号,并根据电池组53输出的电信号向主控制器模块55供电;逆变模块57,分别与BMS模块54和主控制器模块55连接;逆变模块57用于接收BMS模块54发送的控制信号,并根据逆变启动信号和电池组53输出的电信号对电池组53输出的电信号进行变压。
具体地,BMS(Battery Management System,电池管理系统)模块用于对电池组53进行监测、管理以及控制,BMS模块54可包括多个STM8S003模块对电池组53中的每一节电池进行充放电均衡与管理。BMS模块54可根据主控制器模块55发送的控制信号对电池组53的运行状态数据进行采集,电池组53的运行状态数据可包括电池组53的温度和电池组53内每一节电池的运行时间、运行电压、运行电流以及电量。
主控制器模块55可包括设置的STM8S207模块对能源单元50进行总控。主控制器模块55与BMS模块54之间可以是串口通信。主控制器模块55可将从BMS模块54获取的电池组53的运行状态数据发送至水面控制单元10,水面控制单元10转而将其发送至外部控制系统,从而外部控制系统对电池组53的工作状态进行评估,进而进行控制管理。能源单元50与水面控制单元10之间可以通过CAN总线通信,此时能源单元50可包括CAN协议模块58,CAN协议模块58可包括ADM3052模块。
此外,BMS模块54可基于电池组53向CAN协议模块58、逆变模块57以及变压整流模块输出一路24V直流电以分别为其供电;同时,逆变模块57根据主控制器模块55输出的逆变启动信号将24V直流电逆变为220V 50Hz交流电输出,变压整流模块56将24V直流电转换为5V直流电为主控制器模块55供电。本实施例中,各单元及各模块均可由嵌入式芯片、晶体管以及继电器等电子元器件,以及软件和/或硬件实现相应的功能,在此不作具体限定。
注意,上述仅为本发明的较佳实施例及所运用技术原理。本领域技术人员会理解,本发明不限于这里所述的特定实施例,对本领域技术人员来说能够进行各种明显的变化、重新调整和替代而不会脱离本发明的保护范围。因此,虽然通过以上实施例对本发明进行了较为详细的说明,但是本发明不仅仅限于以上实施例,在不脱离本发明构思的情况下,还可以包括更多其他等效实施例,而本发明的范围由所附的权利要求范围决定。
- 一种浮力调节式海洋养殖网箱
- 浮力调节式海洋养殖网箱及其水面控制装置