自动扶梯安全机器人的控制方法及自动扶梯安全机器人
文献发布时间:2023-06-19 11:52:33
技术领域
本申请涉及机器人领域,尤其涉及一种自动扶梯安全机器人的控制方法及自动扶梯安全机器人。
背景技术
随着社会的进步和经济的不断发展,以及城市化建设的大力推进,商场、机场、高铁站都大量开始应用自动扶梯。自动扶梯方便、运行速度较慢,相对厢式电梯而言比较安全,所以得到了人们的广泛欢迎,但仍然很多安全隐患,如乘客在扶梯上滞留、阻塞和跌倒,往往会对乘坐自动扶梯的人造成很大的伤害。
发明内容
有鉴于此,本申请提供一种利用自动扶梯安全机器人的控制方法及自动扶梯安全机器人,能够解决现有技术中乘坐自动扶梯存在的安全隐患问题。
为解决上述技术问题,本申请采用以下技术方案:
第一方面,本申请实施例提供一种自动扶梯安全机器人的控制方法,所述机器人包括:用于搭载乘梯人的支撑部,所述控制方法包括:
获取顾客的特征,其中顾客的特征可以包括顾客的面部特征、形态特征、顾客手中的包裹特征等;
根据所述顾客的特征,判断所述顾客是否属于需要辅助的乘梯人,例如根据顾客的面部特征判断顾客年龄层为老年层、儿童,或行动不便的人群,或者判断顾客的包裹体积较大等,都可以判断属于需要辅助的乘梯人;
当判断所述顾客为需要辅助的乘梯人,则向所述顾客提供乘梯服务,并通过支撑部搭载所述乘梯人,其中,支撑部可以提供座椅和手臂,座椅可以给老年人或儿童乘坐,手臂可以抓握或锁定乘梯人的包裹。
根据本申请实施例的自动扶梯安全机器人的控制方法,可以通过获取顾客的特征,找到有辅助乘梯需要的顾客,并由所述机器人提供安全可靠的搭乘自动扶梯服务,避免老人儿童或带有包裹行动不便的顾客搭乘扶梯产生滞留、阻塞、跌倒等安全隐患问题。
作为本申请第一方面的一个实施例,所述自动扶梯安全机器人的控制方法还包括:
获取周围环境信息,其中,可以通过摄像头或激光雷达扫描自身周围环境,其中,周围的环境可以包括扶梯、顾客,障碍物以及扶梯和顾客移动方向和距离等;
根据所述周围环境信息判断自动扶梯的移动方向和地理位置;
监测顾客的移动方向和移动轨迹;
根据所述顾客的移动方向和移动轨迹以及所述自动扶梯的地理位置判断所述顾客是否预乘所述自动扶梯,若判断所述顾客预乘所述自动扶梯时,并获取所述顾客的特征。由此,根据顾客的特征进一步可以判断顾客是否为需要辅助的乘梯人。
作为本申请的第一方面的一个实施例,所述顾客的特征包括:面部特征、形态特征和/或顾客手中包裹的特征,其中,面部特征可以是面部皱纹、白发数量,形态特征可以是身高、走路姿势笔挺或驼背,包裹的特征可以是包裹的大小体积等。
作为本申请的第一方面的一个实施例,所述需要辅助的乘梯人包括老人、儿童、或需要帮助的持有包裹的人群,根据所述顾客的面部特征、形态特征判断所述顾客是否属于老人或儿童,根据所述顾客手中包裹的特征判断所述顾客是否属于需要帮助的持有包裹的人群。
作为本申请的第一方面的一个实施例,根据所述顾客手中物品的特征判断所述顾客是否属于需要帮助的持有包裹的人群,包括:
判断所述顾客手中的包裹的体积大小和/或形状是否超出设定阈值,当顾客手中的包裹超出预设定值,则判断所述顾客属于需要帮助的持有包裹的人群。
进而实现在顾客手中包裹过大,过重行动不便时,可以为该顾客提供安全可靠的搭乘自动扶梯服务。
作为本申请的第一方面的一个实施例,当判断所述顾客为需要辅助的乘梯人,则向所述顾客提供乘梯服务,包括:
当判断所述顾客为需要辅助的乘梯人,询问所述顾客是否需要辅助乘自动扶梯,当顾客确认需要辅助时,则向所述顾客提供乘梯服务,其中,可以通过语音询问顾客是否需要辅助乘自动扶梯,也可以通过显示屏显示是否需要辅助乘自动扶梯选项,顾客可以语音确认是否需要辅助乘自动扶梯服务,也可以点击显示屏上的选项来选择是否需要辅助乘自动扶梯服务,当顾客选择需要辅助乘自动扶梯,所述机器人向顾客提供需要辅助乘自动扶梯服务。
作为本申请的第一方面的一个实施例,所述支撑部包括:设置在所述机器人躯干上的座椅和/或手臂,
当判断所述顾客为需要辅助的乘梯人,通过座椅支撑乘梯人,通过手臂抓握或锁定乘梯人的包裹。进而确保乘梯人的安全。
作为本申请的第一方面的一个实施例,向所述顾客提供乘梯服务,并通过支撑部搭载所述乘梯人,包括:
当确定乘梯人坐稳后,移动至所述自动扶梯的始发层,并固定在自动扶梯上,以确保乘梯人安全,其中顾客坐稳在所述机器人支撑部提供的座椅,包裹由手臂抓握或锁定后,所述机器人移动至所述自动扶梯的始发层,并固定在自动扶梯上,开始乘坐自动扶梯并保证乘梯人安全。
第二方面,本申请实施例提供了一种自动扶梯安全机器人,包括:
用于搭载乘梯人的支撑部;
第一获取模块,用于获取顾客的特征,其中,顾客的特征包括:面部特征、形态特征和/或顾客手中包裹的特征,面部特征可以包括,脸部皮肤状态如皱纹,眉毛等,形态特征可以包括身高、走路姿态等,包裹特征可以包括包裹的体积大小、形状等。处理模块,根据所述顾客的特征,判断所述顾客是否属于需要辅助的乘梯人;
当所述处理模块判断所述顾客为需要辅助的乘梯人,则向所述顾客提供乘梯服务,并通过支撑部搭载所述乘梯人。
根据本申请实施例的自动扶梯安全机器人,可以通过获取顾客的特征,找到有辅助乘梯需要的顾客,并由机器人提供安全可靠的搭乘自动扶梯服务,避免老人儿童或带有包裹行动不便的顾客搭乘扶梯产生滞留、阻塞、跌倒等安全隐患问题。
作为本申请第二方面的一个实施例,所述自动扶梯安全机器人还包括:
第二获取模块,用于获取周围环境信息;
所述处理模块根据所述周围环境信息判断自动扶梯的移动方向和地理位置;
监测模块,用于监测顾客的移动方向和移动轨迹;
所述处理模块根据所述顾客的移动方向和移动轨迹以及所述自动扶梯的地理位置判断所述顾客是否预乘所述自动扶梯,若判断所述顾客预乘所述自动扶梯时,并通过所述第一获取模块获取所述顾客的特征。
作为本申请第二方面的一个实施例,所述顾客的特征包括:面部特征、形态特征和/或顾客手中包裹的特征。
作为本申请第二方面的一个实施例,所述需要辅助的乘梯人包括老人、儿童、或需要帮助的持有包裹的人群,所述处理模块根据所述顾客的面部特征、形态特征判断所述顾客是否属于老人或儿童,根据所述顾客手中物品的特征判断所述顾客是否属于需要帮助的持有包裹的人群。
作为本申请第二方面的一个实施例,所述处理模块还用于:判断所述顾客手中的包裹的体积大小和/或形状是否超出设定阈值,当顾客手中的包裹超出预设定值,则判断所述顾客属于需要帮助的持有包裹的人群。
作为本申请第二方面的一个实施例,所述处理模块还用于:当判断所述顾客为需要辅助的乘梯人,询问所述顾客是否需要辅助乘自动扶梯,当顾客确认需要辅助时,则向所述顾客提供乘梯服务。
作为本申请第二方面的一个实施例,所述支撑部包括:设置在所述机器人躯干上的座椅和/或手臂,所述处理模块当判断所述顾客为需要辅助的乘梯人,通过控制座椅支撑乘梯人,通过控制手臂抓握或锁定乘梯人的包裹。
作为本申请第二方面的一个实施例,所述自动扶梯安全机器人还包括:底盘和设置在底盘上的锁止机构,所述底盘和锁止机构与所述处理模块连接,
当处理模块确定乘梯人坐稳后,控制底盘移动至所述自动扶梯的始发层,并通过锁止机构固定在自动扶梯上,以确保乘梯人安全。
本申请的上述技术方案至少具有如下有益效果之一:
根据本申请实施例的自动扶梯安全机器人的控制方法,可以找到有辅助乘梯需要的顾客,并由所述机器人提供安全可靠的搭乘自动扶梯服务,避免老人儿童或带有包裹行动不便的顾客搭乘扶梯产生滞留、阻塞、跌倒等安全隐患问题。
附图说明
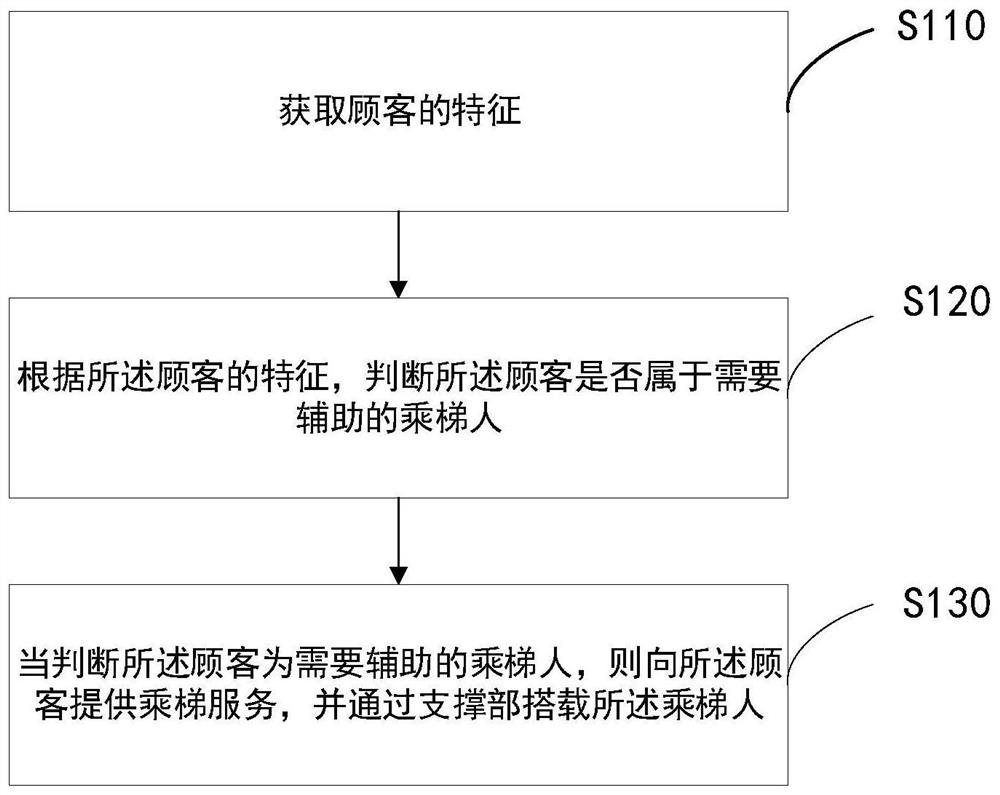
图1为本申请实施例的自动扶梯安全机器人的控制方法流程图;
图2为本申请实施例的自动扶梯安全机器人的示意图。
具体实施方式
为了使本申请的内容更容易被清楚地理解,下面将结合附图和实施例,对本申请的具体实施方式作进一步详细描述。以下实施例用于说明本申请,但不用来限制本申请的范围。
下面结合附图对本申请实施例的自动扶梯机器人的控制方法进行描述,图1示出了自动扶梯安全机器人的控制方法流程图,如图1所示,该控制方法包括如下步骤:
S110,获取顾客的特征。
具体地,顾客的特征可以包括顾客的面部特征、形态特征、顾客手中的包裹特征等,下面以面部特征为例,机器人可以通过摄像头或红外传感器获取顾客画面,根据人脸抽特征算法,基于机器学习和深度学习,在人脸识别的同时,将捕捉到人脸和训练好的人脸模型比对,推断顾客的年龄、性别、身高、体重等特征。例如,顾客年龄约3岁,男性、身高约90cm、体重约15kg;顾客年龄约70岁,女性,身高约150cm,体重约50kg。本申请的其他实施例中,顾客特征也可以是顾客的形态特征和/或顾客手中包裹的特征,在此并不作为唯一限定。
S120,根据顾客的特征,判断顾客是否属于需要辅助的乘梯人。其中需要辅助的乘梯人,可以包括老人、儿童以及行动不便的或手提包裹而导致行动不变的中年人等,通过将上一步骤捕捉到的顾客人脸和人脸模型比对,判断顾客是否需要辅助乘梯,例如,顾客年龄约约3岁,男性、身高约90cm、体重约15kg,判断顾客年龄属于儿童,需要辅助乘梯,顾客年龄约70岁,女性,身高约150cm,体重约50kg,判断顾客年龄属于老人,需要辅助乘梯。
S130,当判断顾客为需要辅助的乘梯人,则向顾客提供乘梯服务,并通过支撑部搭载乘梯人。
其中,支撑部包括:设置在机器人躯干上的座椅和/或手臂,当判断顾客需要辅助乘梯需要时,座椅放平给乘客乘坐,手臂举起,抓握或锁定乘梯人的包裹,手臂也可以抓握自动扶梯,以辅助机器人更加稳定的固定在自动扶梯上。
根据本申请实施例的自动扶梯安全机器人的控制方法,还包括如下步骤:
S210,获取周围环境信息,具体地,可以通过摄像头或激光雷达扫描周围环境,运用SLAM技术,获取周围环境信息,其中包括机器人自身的定位和周围环境的障碍物、自动扶梯的位置、顾客的位置及运行轨迹等。在机器人移动的过程中,可针对周围环境信息定位自身即将移动的轨迹,在达到目标地点位置时,可以避免碰触周围环境的障碍物。
S220,根据周围环境信息判断自动扶梯的移动方向和地理位置,例如,周围环境信息中获取自动扶梯的向上移动或向下移动,以进一步判断顾客和自身是需要上扶梯或是下扶梯。
S230,监测顾客的移动方向和移动轨迹。
其中,通过摄像头或激光雷达扫描周围环境,监测顾客的移动方向和移动轨迹,例如,顾客向自动扶梯方向由远及近移动,或者背离自动扶梯由近及远移动,或者是顾客始终固定在某一个位置,又或者来回独步等,进而判断顾客的移动方向和移动轨迹是否与自动扶梯所在方向一致。
S240,根据顾客的移动方向和移动轨迹以及自动扶梯的地理位置判断顾客是否预乘自动扶梯,若判断顾客预乘自动扶梯时,并获取顾客的特征。
其中,通过摄像头或激光雷达扫描周围环境,运用SLAM技术,定位机器人自身所在位置,获取周围环境中自动扶梯的移动方向和地理位置,同时监测顾客的移动方向和移动轨迹,当顾客的移动方向和移动轨迹与自动扶梯的方向和地理位置一致时,判断顾客预乘坐自动扶梯,机器人向自动扶梯和顾客方向移动,进一步地,当判断顾客朝向自动扶梯所在的位置移动时,可以进一步通过顾客与自动扶梯之间的间隔是否达到指定阈值,例如当判断顾客由远及近距离自动扶梯的第一个台阶达到5米,则判断该顾客预乘自动扶梯,或者是,在机器人刚启动时,顾客已经处于5米内的距离,则判断该顾客为预乘自动扶梯。此时,向顾客移动,并获取顾客的特征,并执行上述步骤S110-S130向顾客提供乘梯服务,并通过支撑部搭载乘梯人。
根据本申请的一个实施例,需要辅助的乘梯人包括老人、儿童、或需要帮助的持有包裹的人群,根据顾客的面部特征、形态特征判断顾客是否属于老人或儿童,根据顾客手中包裹的特征判断顾客是否属于需要帮助的持有包裹的人群。
根据顾客手中物品的特征判断顾客是否属于需要帮助的持有包裹的人群,包括:
S1101,判断顾客手中的包裹的体积大小和/或形状是否超出设定阈值,当顾客手中的包裹超出预设定值,则判断顾客属于需要帮助的持有包裹的人群。
其中,通过深度传感器采集信息计算顾客携带的包裹大小和/或形状,例如,当顾客携带一个30寸的行李箱,计算包裹的大小和/或尺寸超出设定的阈值,阈值可以设20寸,判断顾客属于需要帮助的持有包裹的人群,则向顾客提供乘梯服务。
根据本申请的一个实施例,当判断顾客为需要辅助的乘梯人,询问顾客是否需要辅助乘自动扶梯,当顾客确认需要辅助时,则向顾客提供乘梯服务。其中,可以通过语音询问顾客是否需要辅助乘自动扶梯,也可以通过显示屏显示是否需要辅助乘自动扶梯选项,顾客可以语音确认是否需要辅助乘自动扶梯服务,也可以点击显示屏上的选项来选择是否需要辅助乘自动扶梯服务,当顾客选择需要辅助乘自动扶梯,机器人向顾客提供需要辅助乘自动扶梯服务。
本申请的其他实施例中,也可以是顾客主动寻求机器人的帮助,并在机器人上选择需要辅助乘自动扶梯服务,以满足不同客户的需求。
根据本申请的一个实施例,支撑部包括:设置在机器人躯干上的座椅和/或手臂,当判断顾客为需要辅助的乘梯人,通过座椅支撑乘梯人,通过手臂抓握或锁定乘梯人的包裹,本申请的其他实施例中个,也可以通过手臂搀扶老人或儿童,或者握持自动扶梯,该选择方式可以是机器人自动发起,也可以是乘梯人选择,以满足不同乘梯人的需求。
根据本申请的一个实施例,向顾客提供乘梯服务,并通过支撑部搭载乘梯人,包括:
S310,当确定乘梯人坐稳后,移动至自动扶梯的始发层,并固定在自动扶梯上,以确保乘梯人安全。进一步地,当人较多时,可以首先判断空间位置是否允许,若空间位置允许,移动至自动扶梯的始发层。可以通过惯性测量单元获取自动扶梯的加速度信息,结合SLAM技术,获取机器人自身与自动扶梯的距离。当距离在预定距离内,结合惯性测量单元确定加速度信息与SLAM技术,当判断机器人已经移动至自动扶梯的始发层,开启对应的站扶梯模式,例如,启动自动锁止机构,将机器人与自动扶梯固定连接,增强机器人乘坐扶梯时安全性。
本申请的实施例中,通过惯性测量单元监测自动扶梯的加速度,结合SLAM技术,判断机器人是否到达自动扶梯的终点层,并在到达终点层时,开启下扶梯模式,例如,关闭自动锁止装置,使机器人与自动扶梯解除固定连接,离开自动扶梯。
由此,根据上述自动扶梯安全机器人的控制方法,可以找到有辅助乘梯需要的顾客,并由机器人提供安全可靠的搭乘自动扶梯服务,避免老人儿童或带有包裹行动不便的顾客搭乘扶梯产生滞留、阻塞、跌倒等安全隐患问题。
基于上面的描述,下面结合具体实施例对本申请的自动扶梯安全机器人进行说明,如图2所示,本申请实施例的一种自动扶梯安全机器人,包括:
用于搭载乘梯人的支撑部,支撑部包括:设置在机器人躯干上的座椅和/或手臂,处理模块当判断顾客为需要辅助的乘梯人,通过控制座椅支撑乘梯人,通过控制手臂抓握或锁定乘梯人的包裹。
第一获取模块1001,用于获取顾客的特征,其中顾客的特征可以包括顾客的面部特征、形态特征、顾客手中的包裹特征等;
处理模块1002,根据顾客的特征,判断顾客是否属于需要辅助的乘梯人;
当处理模块1002判断顾客为需要辅助的乘梯人,则向顾客提供乘梯服务,并通过支撑部搭载乘梯人。
根据本申请实施例一个实施例,自动扶梯安全机器人,还包括:
第二获取模块1003,用于获取周围环境信息,例如第二获取模块可以是摄像头或激光雷达等,结合运用SLAM技术等到详细的周围环境信息;
处理模块1002根据周围环境信息判断自动扶梯的移动方向和地理位置;
监测模块1004,用于监测顾客的移动方向和移动轨迹;
处理模块1002根据顾客的移动方向和移动轨迹以及自动扶梯的地理位置判断顾客是否预乘自动扶梯,若判断顾客预乘自动扶梯时,并通过第一获取模块1001获取顾客的特征。
根据本申请的一个实施例,顾客的特征包括:面部特征、形态特征和/或顾客手中包裹的特征,例如,面部特征可以包括脸部皮肤细腻度、皱纹数量等,形态特征可以包括身高、走路姿态等,包裹的特征可以包括包裹的大小、形状。
根据本申请的一个实施例,需要辅助的乘梯人包括老人、儿童、或需要帮助的持有包裹的人群,处理模块1002根据顾客的面部特征、形态特征判断顾客是否属于老人或儿童,根据顾客手中物品的特征判断顾客是否属于需要帮助的持有包裹的人群。
根据本申请的一个实施例,处理模块1002还用于:判断顾客手中的包裹的体积大小和/或形状是否超出设定阈值,当顾客手中的包裹超出预设定值,则判断顾客属于需要帮助的持有包裹的人群。
根据本申请的一个实施例,处理模块1002还用于:当判断顾客为需要辅助的乘梯人,询问顾客是否需要辅助乘自动扶梯,当顾客确认需要辅助时,则向顾客提供乘梯服务。
根据本申请的一个实施例,支撑部包括:设置在机器人躯干上的座椅和/或手臂,
根据本申请的一个实施例,处理模块1002当判断顾客为需要辅助的乘梯人,通过控制座椅支撑乘梯人,通过控制手臂抓握或锁定乘梯人的包裹。
根据本申请实施例的自动扶梯安全机器人,还包括:底盘和设置在底盘上的锁止机构,底盘和锁止机构与处理模块1002连接,
当处理模块1002确定乘梯人坐稳后,控制底盘移动至自动扶梯的始发层,并通过锁止机构固定在自动扶梯上,以确保乘梯人安全。
需要说明的是,本申请实施例提供的自动扶梯安全机器人的具体工作过程在上述实施例中已经详细的说明,具体可参见上述实施例的,对此不在重复赘述。
由此,根据本申请实施例的自动扶梯安全机器人的控制方法及自动扶梯安全机器人,可以找到有辅助乘梯需要的顾客,并由机器人提供安全可靠的搭乘自动扶梯服务,避免老人儿童或带有包裹行动不便的顾客搭乘扶梯产生滞留、阻塞、跌倒等安全隐患问题。
根据本申请实施例的自动扶梯安全机器人的具体工作过程在上述实施例中已经详细的说明,具体可参见上述实施例,在此不再赘述,此外本申请的机器人的其他结构和操作对于本领域技术人员而言都是可以理解并且容易实现的,因此不再详细描述。
在附图中,可以以特定布置和/或顺序示出一些结构或方法特征。然而,应该理解,可能不需要这样的特定布置和/或排序。而是,在一些实施例中,这些特征可以以不同于说明性附图中所示的方式和/或顺序来布置。另外,在特定图中包括结构或方法特征并不意味着暗示在所有实施例中都需要这样的特征,并且在一些实施例中,可以不包括这些特征或者可以与其他特征组合。
需要说明的是,本申请各设备实施例中提到的各单元/模块都是逻辑单元/模块,在物理上,一个逻辑单元/模块可以是一个物理单元/模块,也可以是一个物理单元/模块的一部分,还可以以多个物理单元/模块的组合实现,这些逻辑单元/模块本身的物理实现方式并不是最重要的,这些逻辑单元/模块所实现的功能的组合才是解决本申请所提出的技术问题的关键。此外,为了突出本申请的创新部分,本申请上述各设备实施例并没有将与解决本申请所提出的技术问题关系不太密切的单元/模块引入,这并不表明上述设备实施例并不存在其它的单元/模块。
需要说明的是,在本专利的示例和说明书中,诸如第一和第二等之类的关系术语用来将一个实体或者操作与另一个实体或操作区分开来,而不一定要求或者暗示这些实体或操作之间存在任何这种实际的关系或者顺序。而且,术语“包括”、“包含”或者其任何其他变体意在涵盖非排他性的包含,从而使得包括一系列要素的过程、方法、物品或者设备不包括那些要素,而且还包括没有明确列出的其他要素,或者是还包括为这种过程、方法、物品或者设备所固有的要素。在没有更多限制的情况下,由语句“包括一个”限定的要素,并不排除在包括要素的过程、方法、物品或者设备中还存在另外的相同要素。
以上所述是本申请的优选实施方式,应当指出,对于本技术领域的普通技术人员来说,在不脱离本申请所述原理的前提下,还可以做出若干改进和润饰,这些改进和润饰也应视为本申请的保护范围。
- 自动扶梯安全机器人的控制方法及自动扶梯安全机器人
- 机器人的安全控制设备及机器人的控制方法、机器人