弹条尺寸视觉检测方法
文献发布时间:2023-06-19 11:57:35
技术领域
本发明涉及弹条检测系统,具体地涉及弹条尺寸视觉检测方法。
背景技术
弹条生产过程中需要对其各项特征参数进行检测,相应参数检测合格后才能进入下一道工序,在对弹条的各项特征参数进行检测时,需要弹条摆放稳定,否则会影响到检测数据的准确性。
目前没有合适的弹条尺寸视觉检测方法,依靠繁琐的人工检测,直接导致了弹条的生产效率无法进一步提升。
发明内容
本发明的目的是提供一种弹条尺寸视觉检测方法,该弹条尺寸视觉检测方法能够实现弹条生产线中对生产的弹条特征参数做自动化监测,进而可以自动检测产品的合格情况,以提高生产效率。
为了实现上述目的,本发明提供了一种弹条尺寸视觉检测方法,该弹条尺寸视觉检测方法包括以下步骤:
A1)通过抓取系统将料槽内的弹条抓取至扫描工装上;
A2)通过扫描机器人扫描位于扫描工装上的弹条并获取弹条的特征参数;
A3)通过扫描机器人对位于扫描工装上的弹条拍照并获取弹条上的字符;
A4)根据步骤A2)获取的弹条的特征参数进行自动化检测,并结合步骤3)在弹条上所获取的字符生成检测报告,同时输出综合检测结果;
A5)系统根据步骤A4)所输出的根据综合检测结果判断弹条是否合格;
若弹条合格,则机械臂自动抓取,放置料槽前端,进放入下一个工序;
若弹条不合格,则机械臂自动抓取,放入次品区。
优选地,步骤A4)中的自动化检测步骤包括:将三维扫描新数据输入至自动化控制系统,自动化控制系统更新检测数据,并执行新的检测过程,在执行新的检测过程中通过将三维扫描新数据与定义值进行比较来判断三维扫描新数据是否超限,若超限则弹条不合格,否则弹条合格,并成检测报告,同时输出综合检测结果。
优选地,在步骤A4)中的自动化检测步骤中,对弹条的各项三维扫描数据与相应的自定义值进行逐一对比,若至少一个三维扫描数据存在超限,则弹条不合格。
优选地,自定义值包括:相应位置的几何特征和尺寸测量项目的值。
优选地,在步骤A2)中,扫描机器人作业时,设置在扫描工装底部的转台驱动所述扫描工装以竖直轴线为轴转动以配合所述扫描机器人扫描。
优选地,在步骤A2)中,扫描工装上设置有多个扫描专用贴点,扫描机器人通过扫描专用贴点作为参照坐标,获取弹条各个位置的点云信息,进而计算出弹条的特征参数。
优选地,步骤A1)中抓取系统的抓取过程包括:
B1)通过设置在料槽上方的单目识别模块对料槽上的弹条位置进行初步识别;
B2)通过设置在料槽一侧的粗抓机器人根据初步识别的弹条位置对弹条进行粗抓取,并将抓取后的弹条放置在翻面机构上对应的位置;
B3)通过设置在翻面机构正上方的3D相机模块对放置的弹条进行正反面识别,若弹条倒置则通过翻面机构对倒置的弹条进行翻面;
B4)弹条全部放正以后通过精抓模块将弹条抓取到扫描工装上准备扫描。
优选地,步骤B1)中的单目识别模块为2D相机,所述料槽为倾斜设置,且在拍摄过程中所述2D相机的拍摄方向垂直于所述料槽所在平面。
优选地,在步骤B2)中,通过设置于所述粗抓机器人一侧的光电传感器模块对粗抓的位置和状态不正确的弹条进行筛选。
优选地,在步骤B3)中通过能够配合夹持倒置的弹条组合气缸对倒置的弹条进行翻面。
根据上述技术方案,本发明中的弹条尺寸视觉检测方法能够实现弹条生产线中对生产的弹条特征参数做自动化监测,进而可以自动检测产品的合格情况,以提高生产效率。
本发明的其他特征和优点将在随后的具体实施方式部分予以详细说明。
附图说明
附图是用来提供对本发明的进一步理解,并且构成说明书的一部分,与下面的具体实施方式一起用于解释本发明,但并不构成对本发明的限制。在附图中:
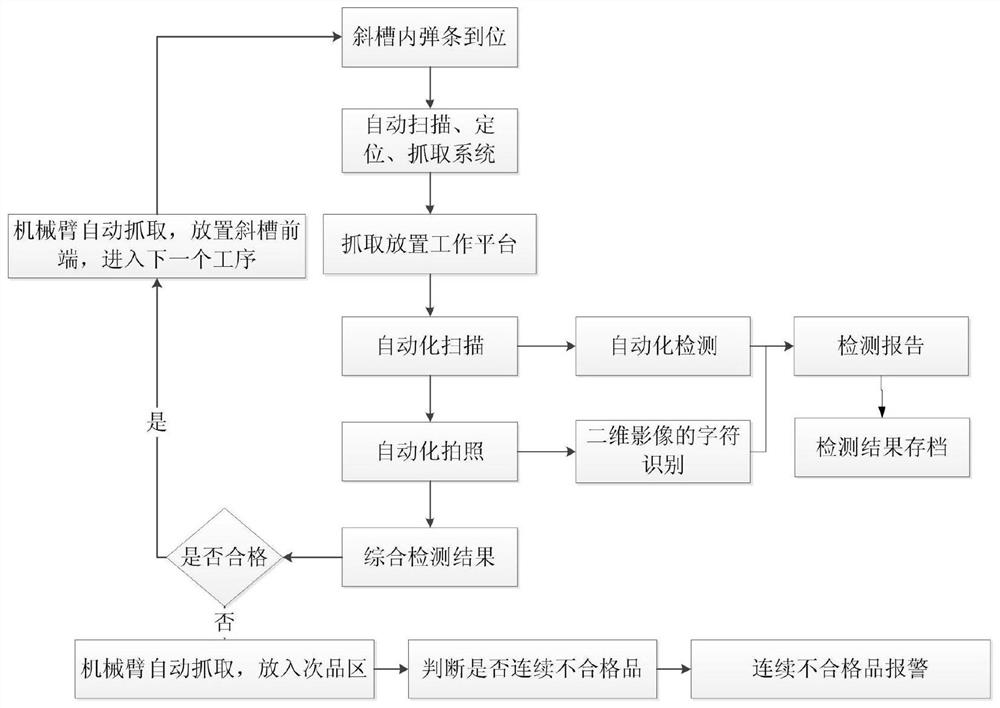
图1是弹条尺寸视觉检测方法的总体流程示意图;
图2是自动化计算测量过程流程示意图;
图3是自动化测量项目定义方法流程示意图;
图4是抓取系统的一种优选实施方式的结构示意图;
图5是扫描工装的一种优选实施方式的结构示意图。
附图标记说明
1-粗抓机器人 2-精抓机器人
3-第二龙门架 4-翻面机构
5-机柜 6-光电传感器模块
7-2D相机 8-扫描机器人
9-第一龙门架 10-3D相机模块
11-料槽 12-底板
13-第二支撑柱 14-第一支撑柱
15-第三支撑柱 16-标识点立柱
17-扫描工装
具体实施方式
以下结合附图对本发明的具体实施方式进行详细说明。应当理解的是,此处所描述的具体实施方式仅用于说明和解释本发明,并不用于限制本发明。
在本发明中,在未作相反说明的情况下,“上下左右、前后内外”等包含在术语中的方位词仅代表该术语在常规使用状态下的方位,或为本领域技术人员理解的俗称,而不应视为对该术语的限制。
参见图1-4所示,该弹条尺寸视觉检测方法包括以下步骤:
A1)通过抓取系统将料槽11内的弹条抓取至扫描工装17上;
A2)通过扫描机器人8扫描位于扫描工装17上的弹条并获取弹条的特征参数;
A3)通过扫描机器人8对位于扫描工装17上的弹条拍照并获取弹条上的字符;
A4)根据步骤A2)获取的弹条的特征参数进行自动化检测,并结合步骤3)在弹条上所获取的字符生成检测报告,同时输出综合检测结果;
A5)系统根据步骤A4)所输出的根据综合检测结果判断弹条是否合格;
若弹条合格,则机械臂自动抓取,放置料槽11前端,进放入下一个工序;
若弹条不合格,则机械臂自动抓取,放入次品区。
通过上述技术方案的实施,该弹条尺寸视觉检测方法能够实现弹条生产线中对生产的弹条特征参数做自动化监测,进而可以自动检测产品的合格情况,以提高生产效率。具体的,从步骤A1)-A5的过程中,能够自动从生产流速线上的料槽11内识别和抓取弹条,将弹条放置在扫描工装17上进行特征参数的扫描,通过扫描结果一方面生产检测报告,另一方面可以向系统输出综合检测结果,系统根据所输出的综合检测结果判断弹条是否合格,若弹条合格,则机械臂自动抓取,放置料槽11前端,进放入下一个工序,若弹条不合格,则机械臂自动抓取,放入次品区,进而在控制系统的所设定的控制程序下自动完成了一整套的检测过程,该弹条尺寸视觉检测方法替代了人工检测,极大的增加了生产效率,同时也减轻了劳动强度。
在该实施方式中,优选地,步骤A4)中的自动化检测步骤包括:将三维扫描新数据输入至自动化控制系统,自动化控制系统更新检测数据,并执行新的检测过程,在执行新的检测过程中通过将三维扫描新数据与定义值进行比较来判断三维扫描新数据是否超限,若超限则弹条不合格,否则弹条合格,并成检测报告,同时输出综合检测结果。
在该实施方式中,优选地,在步骤A4)中的自动化检测步骤中,对弹条的各项三维扫描数据与相应的自定义值进行逐一对比,若至少一个三维扫描数据存在超限,则弹条不合格。
在该实施方式中,优选地,自定义值包括:相应位置的几何特征和尺寸测量项目的值。如图3所示,特征测量位置的几何特征如圆、凸、点等,尺寸测量项目如距离、高度、宽度以及半径等,自定义值在弹条数模数据中设定,通过配准算法与弹条三维扫描数据进行比对。
在该实施方式中,优选地,在步骤A2)中,扫描机器人8作业时,设置在扫描工装17底部的转台驱动所述扫描工装17以竖直轴线为轴转动以配合所述扫描机器人8扫描。通过这样的方式,增加了扫描效率。
在该实施方式中,优选地,在步骤A2)中,扫描工装17上设置有多个扫描专用贴点,扫描机器人8通过扫描专用贴点作为参照坐标,获取弹条各个位置的点云信息,进而计算出弹条的特征参数。
在该实施方式中,优选地,步骤A1)中抓取系统的抓取过程包括:
B1)通过设置在料槽11上方的单目识别模块对料槽11上的弹条位置进行初步识别;
B2)通过设置在料槽11一侧的粗抓机器人1根据初步识别的弹条位置对弹条进行粗抓取,并将抓取后的弹条放置在翻面机构4上对应的位置;
B3)通过设置在翻面机构4正上方的3D相机模块10对放置的弹条进行正反面识别,若弹条倒置则通过翻面机构4对倒置的弹条进行翻面;
B4)弹条全部放正以后通过精抓模块将弹条抓取到扫描工装17上准备扫描。
通过步骤B1)-B4)过程的实施,使得弹条放置在扫描工装17时的位置状态更加统一,提高了扫描精度以及判断是否合格时的准确率。所述精抓模块包括:精抓机器人2和设置于所述精抓机器人2上的精抓夹具,其中的单目识别模块通过第一龙门架9固定在料槽11的斜上方,3D相机模块10通过第二龙门架3固定在翻面机构4正上方,总控系统设置在机柜5内,机柜5配备有散热空调。
在该实施方式中,优选地,步骤B1)中的单目识别模块为2D相机7,所述料槽11为倾斜设置,且在拍摄过程中所述2D相机7的拍摄方向垂直于所述料槽11所在平面。通过2D相机7对料槽11上的弹条进行粗拍摄并将拍摄的弹条位置信息反馈给粗抓机器人1,实现对弹条的抓取,同时,将2D相机7的拍摄方向垂直于所述料槽11所在平面可以提高抓取的准确率。
在该实施方式中,优选地,在步骤B2)中,通过设置于所述粗抓机器人1一侧的光电传感器模块6对粗抓的位置和状态不正确的弹条进行筛选。通过对粗抓机器人1抓取弹条的粗抓位置和状态不正确的弹条进行筛选,以保证到达翻面模块的弹条的统一性。
在该实施方式中,优选地,在步骤B3)中通过能够配合夹持倒置的弹条组合气缸对倒置的弹条进行翻面。如组合气缸包括对象设置的两个夹持气缸,气缸的端部设置有与弹条相匹配的夹块,通过两个夹持气缸将弹条夹持并同步转动180°,松开弹条实现对弹条的翻面。
此外,为了更加进准的放置好弹条,以便精抓模块更加精准的抓取弹条,所述翻面机构4上设置有多个与弹条相配合的放置槽,当弹条正面放入所述放置槽后弹条的前后左右位置被限定。弹条被放入放置槽后,为了便于精抓模块的抓取,弹条的大部分应当露在放置槽的外部。
在本发明中所使用的扫描工装17结构可以为以下结构:如图5所示,所述扫描工装17包括:底板12,所述底板12的前端对称设置有两个用于支撑弹条前肢的第一支撑柱14,所述底板12的中部对称设置有两个用于支撑弹条中肢的第二支撑柱13,所述底板12的后端对称设置有两个用于支撑弹条尾部的第三支撑柱15;所述第一支撑柱14、第二支撑柱13和第三支撑柱15的顶端分别设置有与相应支撑面相适配的第一支撑槽、第二支撑槽和第三支撑槽,所述底板12前端位于两个所述第一支撑柱14的外侧位置分别设置有一个标识点立柱16,所述底板12后端位于两个所述第三支撑柱15的外侧位置分别设置有一个标识点立柱16,每个所述标识点立柱16上均贴有扫描专用贴点。该扫描工装17用于精确承载弹条,材质为Q235B,自带扫描专用贴点作为参照坐标,扫描仪根据参照坐标计算获取弹条各个位置的点云信息,进而计算出弹条的特征参数,此外,为了增加弹条的放置稳定性,在第一支撑柱14、第二支撑柱13和第三支撑柱15的侧面设置永磁铁,使得第一支撑柱14、第二支撑柱13和第三支撑柱15具有一定的磁性,增加对弹条的放置稳定性,可以有效避免弹条滑动。
为了进一步提升对弹条的稳定支撑,所述第一支撑槽沿左右方向延伸,所述第二支撑槽沿前后方向延伸,所述第三支撑槽位于水平面上斜向延伸,并且两个所述第三支撑槽之间的距离沿自前往后的方向上逐渐增大。具体的:通过第一支撑槽增加了对弹条前后方向的滑动阻力,通过第二支撑槽增加了弹条左右方向的滑动阻力,通过第三支撑槽增加了弹条斜向方向的滑动阻力,进而可以对弹条稳定支撑,并且能够与弹条结构相适配。
在步骤A4)的弹条的自动化扫描及检测过程中,针对弹条自动化扫描的需求,在已有手持式扫描仪技术的基础上研制自动化扫描技术,设计开发了自动化的测量方法。利用三维激光自动扫描技术可实现对弹条特征的有效扫描。手持式三维扫描仪利用三角定位技术实现对弹条表面的三维扫描,实现了高精度三维扫描。如下公式为扫描仪在从二维到三维转变过程中的基本关系,通过拍摄二维影像,获取同名影像点,再根据标定的仪器参数,解算得到当前影像的三维信息。
基于三维扫描数据,针对弹条的具体检测项目,开发了各种不同的检测方法,如特征圆数据提取、特征面数据提取、面中心点数据提取、最高点数据提取等等。根据提取的特征再进行距离、半径、高度、宽度等测量要素的计算,最后将计算结果与定义值进行比较,在限差范围内为合格,超出限差范围为不合格。测量系统可提供不低于±0.1mm的测量精度,为自动化测量提供几何精度保证。
以上结合附图详细描述了本发明的优选实施方式,但是,本发明并不限于上述实施方式中的具体细节,在本发明的技术构思范围内,可以对本发明的技术方案进行多种简单变型,这些简单变型均属于本发明的保护范围。
另外需要说明的是,在上述具体实施方式中所描述的各个具体技术特征,在不矛盾的情况下,可以通过任何合适的方式进行组合,为了避免不必要的重复,本发明对各种可能的组合方式不再另行说明。
此外,本发明的各种不同的实施方式之间也可以进行任意组合,只要其不违背本发明的思想,其同样应当视为本发明所公开的内容。
- 弹条尺寸视觉检测方法
- 弹条尺寸视觉检测扫描工装