一种用于配电带电作业地电位法绝缘杆机械臂
文献发布时间:2023-06-19 18:27:32
技术领域
本发明涉及带电作业装备技术领域,具体涉及一种用于配电带电作业地电位法绝缘杆机械臂。
背景技术
为了保障电网系统供电的持续稳定,在配电带电作业时,通常会在绝缘斗臂车无法到达时,运用地电位作业法进行带电作业,将需检修的线路带电解除。上述过程中,通常采用绝缘锁杆将支线引流线固定后开始断引流线,但是大部分引流线都是垂直向下,现有的锁线杆基本为猴头锁杆,锁口和引流线角度不能平行锁紧,无法牢固锁紧引流线或者直接不能锁住引流线,在断引流线过程中很可能出现引流线松脱造成相间短路,存在很大的安全隐患,同时也制约了地电位作业法断引流线作业项目的开展。
另外在地电位作业法中,由于绝缘毯使用范围广、灵活性大,并且为软质材料,但现有绝缘杆工具都不能将绝缘毯包裹在带电设备上,绝缘毯铺设困难。而且在线路带电的情况下,对配电线路的金具安装、拆除作业中都需要很多专用操作杆才能完成带电安装、拆除作业,工具种类繁多,增加了地电位电工的操作负担。在清理导线异物作业中缺乏有效的夹持工具,致使作业人员只能通过对异物的挑、拨、拉、绕等动作完成清理异物工作,操作动作不仅效率不高、费力,同时也会因对带电导线的相间距离要求造成潜在的相间短路风险。
发明内容
本发明提出一种用于配电带电作业地电位法绝缘杆机械臂,解决地电位作业法遇到的引流线锁紧不可靠、绝缘毯铺设困难、清理导线异物作业中缺乏有效的夹持工具,清理工作效率低,风险高的问题。
本发明的技术方案为:一种用于配电带电作业地电位法绝缘杆机械臂,包括第一电动推杆、第二电动推杆、固定座、夹线钳固定底座、线夹钳、转轴、旋转臂、旋转臂固定座、旋臂架、支架,所述旋转臂固定座与旋臂架固定连接,所述旋臂架与支架铰接,所述支架末端设置固定座,所述第一电动推杆一端与固定座铰接,另一端与旋转臂固定座铰接,所述旋转臂固定座内设置旋转臂,所述旋转臂内设置第二电动推杆,所述夹线钳固定底座与旋转臂固定连接,所述线夹钳中部与夹线钳固定底座铰接,末端与转轴铰接,所述第二电动推杆顶部与转轴铰接。
优选的,所述固定座连接伸缩杆,所述伸缩杆由内层伸缩杆、连接器、外层伸缩杆、连接环组成,所述连接器连接内层伸缩杆与外层伸缩杆,所述内层伸缩杆能缩入外层伸缩杆内,所述外层伸缩杆末端设置连接环。所述内层伸缩杆与外层伸缩杆总长为3.5米,作业人员能在3.5米范围内调节,线夹钳部分由旋转臂驱动,可对任意角度的引流线进行锁紧,有效的控制引流线摆动造成相间短路或者脱落。
优选的,所述夹线钳固定底座一侧设置电压感应器组件,所述电压感应器组件由测电笔、电流感应器组成,所述测电笔上设有信号灯。当电压感应器感应到电压时,信号灯以红光常亮来提醒工作人员。
优选的,所述电压感应器组件旁边设置照明装置。所述照明装置用于夜间抢修时照明。
优选的,所述线夹钳为弧形,直径不小于40mm。所述线夹钳直径不小于40mm。线夹钳夹持力度控制在60N-100N之间,抓取导线直径为16mm
优选的,所述线夹钳由左爪和右爪组成,所述左爪和右爪的爪齿相互咬合。所述左爪和右爪的爪齿相互咬合可防止导线脱落。
优选的,所述爪齿内缘设置若干防滑花纹。所述防滑花纹能够提高爪齿与物品之间的摩擦力,避免爪齿抓取物品时打滑导致物品脱落,引发其他安全事故。
优选的,所述夹线钳固定底座、线夹钳、旋转臂固定座、旋臂架、支架采用铝合金材料制作。所述铝合金材料制作的夹线钳固定底座、线夹钳、旋转臂固定座、旋臂架、支架重量轻,结构强度高,降低了本发明的重量,提升本发明使用时的舒适感,提高作业人员作业效率。
本发明的原理:本发明设置2组电动推杆第一电动推杆、第二电动推杆,所述第一电动推杆用于调节线夹钳与固定座之间的角度,方便作业人员根据现场情况调整线夹钳作业角度;所述第二电动推杆顶部连接线夹钳的转轴铰接,当第二电动推杆上下移动时,所述线夹钳实现开、闭,方便作业人员锁紧引流线或夹取物品;所述旋转臂能实现360°旋转,能够带动线夹钳自由转动,提供更为敏捷的操作角度,提高作业人员的作业效率,另外本发明可连接电控操作装置,所述电控操作装置包括无线芯片、手柄和开关,所述无线芯片设置于手柄内,所述手柄可旋转及上下推动,当旋转手柄时上方的旋转臂实现旋转功能,从而带动线夹钳360°旋转,当向上下方向推动时,第二电动推杆实现上下运行,从而带动线夹钳张开、闭合,执行上述操作后手柄可自动复位;所述开关可上下推动来实现第一电动推杆的上下运行,从而调节线夹钳与固定座之间的角度,操作完成自动复位,上述操作均在无线控制方式下完成。
本发明所要解决的技术问题是:提供一种用于配电带电作业地电位法绝缘杆机械臂,所述第一电动推杆用于调节线夹钳与固定座之间的角度,方便作业人员根据现场情况调整线夹钳作业角度,所述第二电动推杆顶部连接线夹钳的转轴铰接,当第二电动推杆上下移动时,所述线夹钳实现开、闭,方便作业人员锁紧引流线或夹取物品,使用方式较为便捷。
本发明的有益效果:一种用于配电带电作业地电位法绝缘杆机械臂,重量轻,结构强度高,降低高空作业时作业人员的工作负担,使用方便,稳定可靠,用途广泛,提升工作效率,有效保障作业人员人身安全。
附图说明
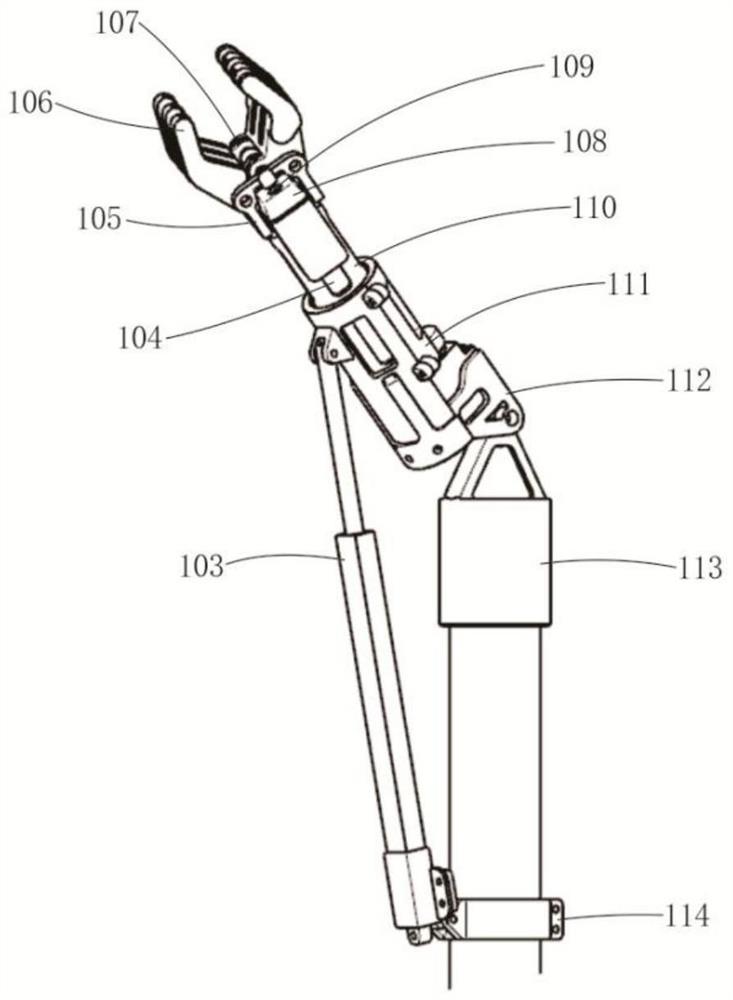
图1为本发明结构示意图;
图2为本发明结构示意图;
图中,103-第一电动推杆,104-第二电动推杆,105-夹线钳固定底座,106-线夹钳,107-转轴,108-测电笔,109-照明装置,110-旋转臂,111-旋转臂固定座,112-旋臂架,113-支架,114-固定座,115-内层伸缩杆,116-连接器,117-外层伸缩杆,118-连接环。
具体实施方式
本发明的具体实施方式为:如图1、图2所示,一种用于配电带电作业地电位法绝缘杆机械臂,包括第一电动推杆103、第二电动推杆104、固定座114、夹线钳固定底座105、线夹钳106、转轴107、旋转臂110、旋转臂固定座111、旋臂架112、支架113,所述旋转臂固定座111与旋臂架112固定连接,所述旋臂架112与支架113铰接,所述支架113末端设置固定座114,所述第一电动推杆103一端与固定座114铰接,另一端与旋转臂固定座111铰接,所述旋转臂固定座111内设置旋转臂110,所述旋转臂110内设置第二电动推杆104,所述夹线钳固定底座105与旋转臂110固定连接,所述线夹钳106中部与夹线钳固定底座105铰接,末端与转轴107铰接,所述第二电动推杆104顶部与转轴107铰接。
具体的,所述固定座114连接伸缩杆,所述伸缩杆由内层伸缩杆115、连接器116、外层伸缩杆117、连接环118组成,所述连接器116连接内层伸缩杆115与外层伸缩杆117,所述内层伸缩杆115能缩入外层伸缩杆117内,所述外层伸缩杆117末端设置连接环118。所述内层伸缩杆115与外层伸缩杆117总长为3.5米,作业人员能在3.5米范围内调节,线夹钳106部分由旋转臂110驱动,可对任意角度的引流线进行锁紧,有效的控制引流线摆动造成相间短路或者脱落。
具体的,所述夹线钳固定底座105一侧设置电压感应器组件,所述电压感应器组件由测电笔108、电流感应器组成,所述测电笔108上设有信号灯。当电压感应器感应到电压时,信号灯以红光常亮来提醒工作人员。
具体的,所述电压感应器组件旁边设置照明装置109。所述照明装置109用于夜间抢修时照明。
具体的,所述线夹钳106为弧形,直径不小于40mm。所述线夹钳106直径不小于40mm。线夹钳106夹持力度控制在60N-100N之间,抓取导线直径为16mm
具体的,所述线夹钳106由左爪和右爪组成,所述左爪和右爪的爪齿相互咬合。所述左爪和右爪的爪齿相互咬合可防止导线脱落。
具体的,所述爪齿内缘设置若干防滑花纹。所述防滑花纹能够提高爪齿与物品之间的摩擦力,避免爪齿抓取物品时打滑导致物品脱落,引发其他安全事故。
具体的,所述夹线钳固定底座105、线夹钳106、旋转臂固定座111、旋臂架112、支架113采用铝合金材料制作。所述铝合金材料制作的夹线钳固定底座105、线夹钳106、旋转臂固定座111、旋臂架112、支架113重量轻,结构强度高,降低了本发明的重量,提升本发明使用时的舒适感,提高作业人员作业效率。
以上显示和描述了本发明的基本原理、主要特征和本发明的优点。本行业的技术人员应该了解,本发明不受上述实施例的限制,上述实施例和说明书中描述的只是说明本发明的原理,在不脱离本发明精神和范围的前提下,本发明还会有各种变化和改进,这些变化和改进都落入要求保护的本发明范围内。本发明要求保护范围由所附的权利要求书及其等效物界定。
- 一种机械臂的带电作业绝缘杆及其带电作业机器人
- 一种用于绝缘导线地电位带电作业施工用扭力操作杆