一种风电变桨控制系统限位开关安全旁路的控制策略
文献发布时间:2023-06-19 18:34:06
技术领域
本发明涉及风力发电技术领域,特别是涉及一种风电变桨控制系统限位开关安全旁路的控制策略。
背景技术
风能是一种新型的、可再生的环保能源,风力发电项目是国家产业政策积极扶持的重点项目。变桨系统作为风力发电机组的核心系统之一,对其可靠性、安全性、故障处理的合理性方面都有较高要求。
目前市场上绝大多数变桨系统的每个桨叶面都在桨叶的91°和96°两个位置装有限位开关作为安全保护措施。桨叶运行到91°触发第一道限位开关后会由软件控制电机停机,如果停机失败,桨叶继续转动到96°将会触发第二道限位开关。而96°限位开关的常闭触点和变桨系统驱动器的硬件使能信号是直接串联在一个回路中的,当96°限位开关触发后,其常闭触点断开,则驱动器的使能回路开路,驱动器将强制停机。该措施的目的在于确保变桨系统的安全性,但是其也存在一个明显缺点:一旦该故障触发,无论故障原因是否排除,都必须要维护人员进入塔筒机舱内,将变桨系统切换为手动模式,再将桨叶开出脱离96°限位开关。对于海上机组因为出海时间的不确定性,一旦触发此类故障有可能造成机组的长时间停机,严重影响机组的发电效率。
发明内容
针对上述现有技术的不足,本专利申请所要解决的技术问题是如何提供一种风电变桨控制系统限位开关安全旁路的控制策略,在确保变桨系统安全的情况下可以通过主控发送指令来远程解决变桨系统触发96°限位开关的故障,避免维护人员出海上塔排除该故障造成的时间浪费,提高风力发电机组的运行效率。
为了解决上述技术问题,本发明采用了如下的技术方案:
一种风电变桨控制系统限位开关安全旁路的控制策略,包括以下步骤:
S1:主控向变桨控制系统发送限位开关旁路信号,判断96°限位开关是否触发,若是,则进入步骤S2,若否,则不执行任何操作;
S2:变桨驱动器控制旁路继电器接通,判断电机是否继续失控转动,若否,则进入步骤S3,若是,则进入步骤S5;
S3:变桨驱动器控制电机慢速反转脱离96°限位开关,判断编码器反馈角度是否持续减小,若是,则进入步骤S4,若否,则进入步骤S5;
S4:判断是否脱离96°限位开关,若否,则返回步骤S3,若是,则进入步骤S5;
S5:断开旁路继电器。
本发明公开的变桨控制系统限位开关的旁路控制策略,在将变桨系统的96°限位开关的常闭信号接入驱动器的硬件使能的同时,并联接入一支由继电器控制通断的回路形成旁路,驱动器通过控制继电器的通断来实现限位开关的旁路功能。当变桨系统发生故障顺桨失控停在96°限位开关的时候,如果已经远程排除故障,主控可发送旁路信号到变桨系统来启用旁路功能,再由变桨驱动器综合判断桨叶实际状况,在确保系统安全的情况下接通旁路继电器,从而由变桨系统控制将桨叶自动运行到安全位置,脱离96°限位开关。本发明能够在确保变桨系统安全的情况下,通过主控发送指令来远程解决变桨系统触发96°限位开关的故障,避免维护人员出海上塔排除该故障造成的时间浪费,提高风力发电机组的运行效率。
综上,本发明具有以下有益效果:
1、本发明可以远程解决变桨系统触发96°限位开关的故障,避免维护人员出海上塔排除该故障造成的时间浪费,提高风力发电机组的运行效率。
2、本发明涉及的控制策略严谨可靠,能够在确保安全的情况下实现限位开关的旁路功能。
附图说明
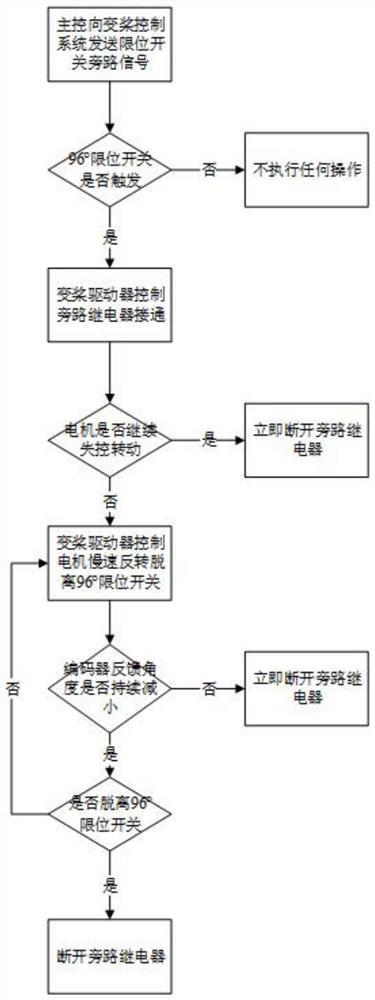
图1为本发明所述的一种风电变桨控制系统限位开关安全旁路的控制策略流程图。
具体实施方式
下面结合附图对本发明作进一步的详细说明。在本发明的描述中,需要理解的是,方位词如“上、下”和“顶、底”等所指示的方位或位置关系通常是基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,在未作相反说明的情况下,这些方位词并不指示和暗示所指的装置或元件必须具有特定的方位或者以特定的方位构造和操作,因此不能理解为对本发明保护范围的限制;方位词“内、外”是指相对于各部件本身的轮廓的内外。
如图1所示,一种风电变桨控制系统限位开关安全旁路的控制策略,包括以下步骤:
S1:主控向变桨控制系统发送限位开关旁路信号,判断96°限位开关是否触发,若是,则进入步骤S2,若否,则不执行任何操作;
S2:变桨驱动器控制旁路继电器接通,判断电机是否继续失控转动,若否,则进入步骤S3,若是,则进入步骤S5;
S3:变桨驱动器控制电机慢速反转脱离96°限位开关,判断编码器反馈角度是否持续减小,若是,则进入步骤S4,若否,则进入步骤S5;
S4:判断是否脱离96°限位开关,若否,则返回步骤S3,若是,则进入步骤S5;
S5:断开旁路继电器。
具体实施时,当变桨系统触发故障顺桨的过程中如果电机失控,桨叶将持续顺桨至触发96°限位开关,此时由于驱动器硬件使能信号断开,电机将强制停机。发生此故障后主控首先排除相应故障并复位,然后可以通过通讯向变桨系统发出限位开关旁路信号,变桨系统接收到此信号后首先判断96°限位开关是否触发,以此来杜绝主控误发信号影响系统安全的情况。当96°限位开关处于触发状态时变桨驱动器控制旁路继电器接通,同时给出电机停机命令。此时如果电机依然处于失控状态继续正转则驱动器立即断开旁路继电器,电机由于失去硬件使能信号会强制停机,确保系统的安全。如果电机恢复了正常,则驱动器会给出慢速反转的命令,然后监测编码器的角度反馈情况:如果编码器角度没有持续减小,说明系统仍存在严重故障,为确保安全系统立即断开旁路继电器;如果编码器角度持续减小,说明电机执行了反转命令,等到桨叶脱离96°限位开关后,则断开旁路继电器,此时96°限位开关的常闭信号已接通,驱动器不会再失去硬件使能信号,电机可继续正常运行。
具体实施时,操作如下:
1、完成相关硬件的接线和变桨及主控程序的更换,确保新增信号的控制反馈正常。
2、在变桨系统处于手动模式的情况下将桨叶开往96°限位开关处停下,模拟桨叶电机失控停在96°限位开关的情况。
3、将变桨系统切换为自动模式,然后主控向变桨系统发出限位开关旁路信号。
4、变桨系统接收到信号后,旁路继电器接通,驱动器恢复硬件使能信号,电机开始慢速反转。
5、桨叶反转至脱离96°限位开关后,电机停止运行,旁路继电器断开,主控取消旁路信号。
6、主控复位掉系统故障,发出启机指令,桨叶开往指定启机角度。
最后应说明的是:本领域的技术人员可以对本发明进行各种改动和变型而不脱离本发明的精神和范围。这样,倘若本发明的这些修改和变型属于本发明权利要求及其等统计数的范围之内,则本发明也意图包含这些改动和变型。
- 一种风电变桨控制系统与风电变桨系统
- 一种风电变桨控制系统与风电变桨系统