一种自动控制均匀喷洒杀菌整理液的抓棉机及工艺
文献发布时间:2023-06-23 06:30:03
技术领域
本发明属于原棉梳联并条机械设备的技术领域,具体涉及一种自动控制均匀喷洒杀菌整理液的抓棉机及工艺。
背景技术
棉散纤维,是原棉纤维、或原棉经梳联、并条后的纤维,是棉纱、棉混纺纱以及服装、非植入式医疗、卫生保健织物的原材料。随人民群众生活水平提高,对抗菌织物的抗菌性提出广谱、高效、耐洗、而且制备方法环保的技术需求。抗菌织物的制备,通常有两种途径,一是采用普通的散纤维为原料制成织物后再通过抗菌处理,这种途径仅仅在织物表面形成抗菌,难于达到耐洗性能;二是采用抗菌散纤维为原料,制成的织物不仅织物表面而且织物内部能够抗菌,因此容易达到耐洗性能。
抗菌散纤维的制备,其关键技术有两个方面,一是抗菌溶液的制备技术,例如,CN114575149A公开了一种Ag系磷酸盐基无机抗菌液的制备方法;二是抗菌溶液与散纤维的耦合技术。抗菌溶液与散纤维的耦合,目前通常有两种主要方法,一是浸泡方法,但是浸泡方法散纤维容易发生团聚,需要进行过滤、烘干、打散,能耗高;二是使用抓棉机对棉层抓取时,在棉层表面喷洒抗菌液。抓棉机,例如CN104294411B所述,是开清棉联合机中的第一道工序,从开棉混棉的工艺要求来讲,期望原棉经抓棉机加工后有较好的开松质量,这样将有利于原棉充分混和,也可为开清棉工艺的开松除杂创造有利的条件。在棉层表面喷洒抗菌液,潮湿团聚的散纤维,非常容易堵塞在抓棉机的集棉打手上,一旦发生堵塞,抓棉机难于继续工作,不得不停机清理;另一方面,在棉层喷洒抗菌液,仅仅是棉层表面的散纤维接触到抗菌液,被抓棉机抓取的散纤维,仅仅一小部分与抗菌液接触,大部分没有与抗菌液接触,导致散纤维抗菌性能非常不均匀。
发明内容
本发明针对现有技术存在的不足,提供一种自动控制均匀喷洒杀菌整理液的抓棉机及方法,采用与目前在棉层表面喷洒抗菌液不同的设计思路,通过在抓棉机的集棉打手上方的集棉仓内喷洒抗菌液,解决集棉打手团聚问题,更进一步,通过在集棉打手前后装配检测棉层厚度传感器组合,检测集棉打手抓取的散纤维的体积,然后同步控制集棉仓内喷洒抗菌液的浓度,解决了散纤维与抗菌液混合不均匀的技术难题。
为了实现以上目的,本发明的技术方案为:
一种自动控制均匀喷洒杀菌整理液的抓棉机,包括支架单元、抓棉单元、输送单元、喷洒单元和控制单元;
支架单元设于原棉的料仓上,包括底座以及可绕底座中心轴做圆周运动的转动支架,转动支架设有支撑平台;抓棉单元装设于支撑平台,包括集棉打手和集棉仓,集棉打手安装在集棉仓内;输送单元连通于集棉仓顶部;
喷洒单元包括用于检测棉层厚度的激光测距传感器组合、喷枪和储液容器,喷枪装设于集棉仓内并连通储液容器,储液容器用于容纳杀菌整理液;激光测距传感器组合包括分别设于集棉打手前后两侧的激光测距传感器;
控制单元,接收激光测距传感器组合的数据,以前后两侧的激光测距传感器检测到的集棉仓与料仓原棉的垂直高度数据之差表示抓棉单元做圆周运动时通过集棉打手抓取原棉的厚度,并结合集棉打手的宽度、抓棉机的运行速度和原棉的堆积密度计算出抓棉单元通过集棉打手抓取原棉的重量数据,根据重量数据控制喷枪喷洒相应杀菌整理液的重量。
可选的,所述输送单元包括连接于所述集棉仓顶部的传输硬管道和与所述传输硬管道连接的软管道,所述软管道可上下伸缩。
可选的,所述料仓为圆形料仓,所述底座设置于所述圆形料仓的圆心处,所述控制单元控制所述转动支架带动所述抓棉单元于所述圆形料仓内做圆周运动。
可选的,所述集棉仓设有透明的集棉观察窗,所述集棉观察窗与所述喷枪的位置相对应。
可选的,所述喷枪为喷洒液重量可控的步进喷枪。
可选的,所述激光测距传感器组合包括设于所述集棉打手前侧的若干前置的激光测距传感器和设于所述集棉打手后侧的若干后置的激光测距传感器;所述前置的激光测距传感器和后置的激光测距传感器具有相同的个数和排布,且基准线处于同一水平面;对前置的激光测距传感器和后置的激光测距传感器的测试数据分别取平均值。
可选的,所述前置的激光测距传感器和后置的激光测距传感器为激光波长为620nm~690nm、测量范围为0.03~10m、测量精度为±1mm、测量工作频率1Hz(1次/秒)的激光测距传感器。
一种制备抗菌纤维的抓棉工艺,采用上述的自动控制均匀喷洒杀菌整理液的抓棉机,当所述传感器组合检测到进入所述集棉仓的原棉重量为A时,所述喷枪向所述集棉仓内喷洒重量为A×(0.5%~12.5%)的杀菌整理液的雾化液。
可选的,所述杀菌整理液的雾化液的液滴直径为0.1~5微米。
可选的,所述杀菌整理液为Ag系磷酸盐基无机抗菌液,以P元素含量(atom%)为1,Ag/P/O元素的比例为0.067/1/9.4,Na/Ca/P元素的比例为1.17/0.08/1。
本发明的有益效果为:
通过在抓棉机的集棉打手上方的集棉仓内喷洒抗菌液,解决集棉打手堵塞团聚问题;并且通过在集棉打手前后装配检测棉层厚度的激光测距传感器组合,检测集棉打手抓取的散纤维的体积,然后同步控制集棉仓耐喷洒抗菌液的浓度,解决了散纤维与抗菌液混合不均匀的技术难题。不仅自动化程度高,而且得到抗菌性能均匀的散纤维。可应用于抗菌棉散纤维、抗菌黏胶散纤维、抗菌棉纱、抗菌混合纱。
附图说明
图1为实施例的自动控制均匀喷洒杀菌整理液的抓棉机的主视图;
图2为实施例的自动控制均匀喷洒杀菌整理液的抓棉机的侧视图;
图3为集棉打手与激光测距传感器组合的位置示意图。
具体实施方式
以下结合附图和具体实施例对本发明做进一步解释。本发明的各附图仅为示意以更容易了解本发明,其具体比例可依照设计需求进行调整。
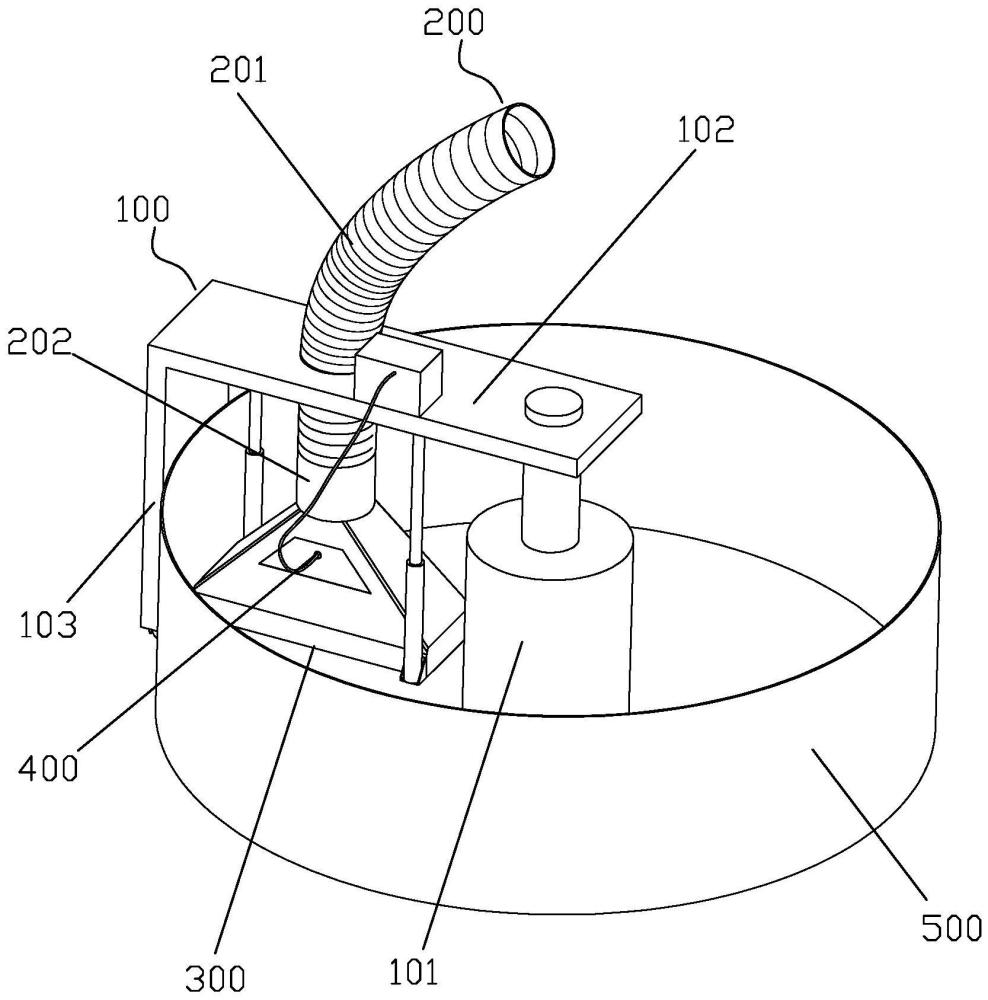
参考图1至图3,一种自动控制均匀喷洒杀菌整理液的抓棉机,包括支架单元100、输送单元200、抓棉单元300、喷洒单元400和控制单元。支架单元设于原棉的料仓500上,包括底座101和可绕底座中心轴做圆周运动的转动支架103,转动支架103设有支撑平台102。抓棉单元300装设于支撑平台102,包括集棉打手301、集棉仓302和集棉观察窗303,集棉打手301安装在集棉仓302内。输送单元200包括连接于集棉仓302顶部的传输硬管道202和与传输硬管道202连接的软管道201,软管道201可上下伸缩。喷洒单元400包括检测棉层厚度的激光测距传感器组合401、喷枪402和储液容器403。喷枪402装设于集棉仓302内并连通储液容器403,储液容器403用于容纳杀菌整理液;激光测距传感器组合401包括设于集棉打手301前侧的若干前置的激光测距传感器401a和设于集棉打手301后侧的若干后置的激光测距传感器401b。控制单元用于接收激光测距传感器组合401的信息并控制抓棉机动作。
料仓500为圆形料仓,底座101设置于圆形料仓的圆心处,控制单元控制转动支架103带动抓棉单元300于圆形料仓内做圆周运动,并可控制集棉打手301上下移动。
激光测距传感器组合401垂直设置于集棉打手301前后,前置的激光测距传感器401a和后置的激光测距传感器401b,一是各自具有相同的个数,二是具有相同的工作频率,三是具有相同的测距范围和测距精度,四是垂直设置并且基准线处于同一水平面。以前后两侧的激光测距传感器检测到的集棉仓与料仓原棉的垂直高度数据之差表示抓棉单元做圆周运动时通过集棉打手抓取原棉的厚度。垂直高度是指集棉仓与料仓原棉表面之间的距离。具体的是指附图3的激光测距传感器与料仓原棉表面之间的距离。工作原理是激光测距传感器从上往下垂直发出激光信号,激光信号打到料仓原棉表面,反射回来的激光信号进入传感器,从而测量出传感器与料仓原棉表面之间的距离。料仓原棉处于下方,激光测距传感器处于上方,两者是垂直位置关系。
控制单元,接收每个激光测距传感器的数据,对前置的多个激光测距传感器401a的数据计算出平均值(H
A=ρ×π×(D
其中d为附图1底座101的半径(单位为m)。
并将该数据反馈给喷枪控制器,相应地控制喷枪喷洒出的杀菌整理液的重量。
喷枪402是喷洒液重量可电动自动控制的步进喷枪,其受控于控制单元,一是与杀菌整理液喷洒开关的电气以及与喷洒量步进喷枪的电气连接形成自动可控,二是当激光测距传感器组合检测到进入集棉仓的原棉重量为A时,该步进喷枪可往集棉仓内喷洒液滴粒径(直径)为0.1~5微米、重量为A*0.5~12.5%的杀菌整理液的雾化液。透明的集棉观察窗303与喷枪的位置相对应以用于观察喷洒情况。
上述控制单元举例来说可以是PLC控制系统(Programmable Logic Controller,可编程逻辑控制器)。
实施例1
堆积密度为300kg/m
喷枪是喷洒液重量可电动自动控制的步进喷枪,与杀菌整理液喷洒开关的电气以及与喷洒量步进喷枪的电气连接形成自动可控,该步进喷枪可往集棉仓内喷洒液滴粒径(直径)为0.1~5微米、重量为0.0157kg/s(即3.14*0.5%)的杀菌整理液的雾化液。杀菌整理液的组分为Ag系磷酸盐基无机抗菌液,以P元素含量(atom%)为1,Ag/P/O元素的比例为0.067/1/9.4。Na/Ca/P元素的比例为1.17/0.08/1。一个小时抓棉机抓取原棉11304kg,喷涂杀菌整理液56.52kg,得到与杀菌整理液充分混合的原棉。整个过程抓棉打手没有堵塞,没有出现集棉打手堵塞团聚问题。按间隔10分钟取测试样品,样品洗涤按照FZ/T 73023-2006附录C的洗涤方法,金黄色葡萄球菌、大肠杆菌、白色念珠菌的抗菌测试按照GB/T 201510-2008进行检测;结果,6个样品的抗菌率,抗菌级别达到FZ/T 73023-2006要求的AA级。表明通过该发明得到的杀菌整理液耦合原棉均匀性很好。
实施例2
往集棉仓内喷洒重量为0.3925kg/s(即3.14*12.5%)的杀菌整理液的雾化液。一个小时喷涂杀菌整理液1413kg。其他与实施例1相同。6个样品的抗菌率,抗菌级别达到FZ/T73023-2006要求的AAA级。整个过程抓棉打手没有堵塞,没有出现集棉打手堵塞团聚问题。得到的杀菌整理液耦合原棉均匀性很好。
比较例1
往集棉仓内喷洒液滴粒径(直径)为重量为0.00628kg/s(即3.14*0.2%)的杀菌整理液的雾化液。一个小时喷涂杀菌整理液22.608kg。其他与实施例1相同。6个样品的抗菌率,抗菌级别仅仅达到FZ/T 73023-2006要求的A级,达不到AA级。虽然整个过程抓棉打手没有堵塞,得到的杀菌整理液耦合原棉均匀性很好,抗菌级别低。
比较例2
往集棉仓内喷洒液滴粒径(直径)为重量为0.4239kg/s(即3.14*13.5%)的杀菌整理液的雾化液。一个小时喷涂杀菌整理液1526.04kg。其他与实施例1相同。6个样品的抗菌率,抗菌级别达到FZ/T 73023-2006要求的AAA级。虽然抗菌级别高,到的杀菌整理液耦合原棉均匀性很好,但是过程中,喷涂液的雾化液在集棉仓内壁形成液滴,滴到抓棉打手,形成堵塞,出现了集棉打手堵塞团聚问题。中途停机清理抓棉打手一次。
比较例3
没有设置激光测距传感器。抓棉机对棉层抓取时,杀菌整理液的喷涂采用传统手动方式通过喷枪在原棉层表面进行喷洒抗菌液。杀菌整理液的雾化直径、一个小时的喷涂总量、抗菌测试的取样方法和实施例1相同。但是,过程中,抓棉机的抓棉打手,逐渐堵塞,出现了严重的集棉打手堵塞团聚问题。隔10分钟左右需要清理一次。6个样品的抗菌率,抗菌级别达到FZ/T 73023-2006要求的AA级的有4个样品,其他2个样品没有抗菌性。表明得到的杀菌整理液耦合原棉均匀性很差。
上述实施例仅用来进一步说明本发明的一种自动控制均匀喷洒杀菌整理液的抓棉机及工艺,但本发明并不局限于实施例,凡是依据本发明的技术实质对以上实施例所作的任何简单修改、等同变化与修饰,均落入本发明技术方案的保护范围内。
- 一种纺纱工艺的圆盘式抓棉机
- 一种涤纶纱线生产用抓棉机均匀抓棉装置
- 一种抓棉均匀的圆盘抓棉机圆形打手装置