一种黑臭水体治理设备及黑臭水体治理方法
文献发布时间:2023-06-29 06:30:04
技术领域
本发明涉及的黑臭水体处理技术领域,尤其是涉及一种黑臭水体治理设备及黑臭水体治理方法。
背景技术
水体黑臭是一种生物化学现象,当水体遭受严重有机污染时,有机物的好氧分解使水体中耗氧速率大于复氧速率,造成水体缺氧,致使有机物降解不完全、速度减缓,厌氧生物降解过程生成硫化氢、氨、硫醇等发臭物质,同时形成黑色物质,使水体发生黑臭。水体黑臭是严重的水污染现象,使水体完全丧失使用功能,并影响景观以及人类生活和健康。
目前,黑臭水体通常采用“七字法”统筹化综合治理法进行黑臭水体的治理;该“七字法”为“截、引、净、减、调、养、测”,其中关于“养”的解释为,整治内源污染,通过微生物复合菌进行水体营养结构恢复,稳定或重建生态系统和食物链结构。
现有黑臭水体现象主要集中在小型河道中,在农田灌溉时期水库泄水,经过各个河道的导流,使水库泄出的水流向各个农田附近,让农民得以使用河道内的水来灌溉农田;但灌溉期结束后,水库关闭使得河道无法补充水源,河道内的水无法继续流动,使得河道内的水渐渐变为死水,并且在河道底部沉积了树叶、灰尘等杂物,渐渐地会在河道底部形成大量的淤泥,使水体发黑发臭;而在黑臭水体治理时,通常采用人工打捞的方式,打捞黑臭水体内的杂质,并去除附着在杂质上的淤泥,其中杂质包括重质杂质(例如石子、玻璃碎渣等)和轻质杂质(树叶、塑料瓶等),不仅仅费时费力,而且难以对轻重杂质进行分离,而且需要治理人员乘船抛洒微生物复合菌液,微生物复合菌液首先接触黑臭水体的上表面,伴随水体流动,微生物复合菌液难以到达黑臭水体的中下层位置处,治理效果差,治根不治本;并通过观察“鲶鱼清除淤泥并净化水质”的行为,提出一种黑臭水体治理设备,以解决上述技术问题。
发明内容
本申请提供一种黑臭水体治理设备及黑臭水体治理方法,方便去除附在杂质上的淤泥,并将微生物复合菌液快速导入到黑臭水体的中下层位置处,治理效果好。
本申请提供的一种黑臭水体治理设备及黑臭水体治理方法,采用如下的技术方案:
一种黑臭水体治理设备,包括基于无线电进行远程控制的潜水机架和用于净化水体的化学絮凝剂,所述潜水机架内部设有前后贯通的处理腔,所述处理腔的进料口且靠近潜水机架的头部位置上设有两组呈相对设置且可发生相对转动的张合块,所述张合块的内部设有凹陷部,所述张合块上至少设有两组流通缺口,所述流通缺口的内部转动设有倾斜排布有若干组流通鳃,所述流通鳃用于滤除黑臭水体中的杂质同时均匀释放化学絮凝剂;
通过采用上述技术方案,进入到口腔内的黑臭水与流通鳃的表面接触,利用设置在张合块两侧且仿“鲶鱼的鱼鳃结构”的流通鳃,分泌释放用于净化黑臭水的化学絮凝剂,并伴随滤除杂质后的水流排出张合块,排出后的化学絮凝剂会进入到黑臭水体中,用于全方面净化黑臭水体。
所述潜水机架上设有上通道口和下通道口,上通道口和下通道口均与处理腔相连通,所述上通道口的出口和下通道口的出口均与潜水机架的外部水体连通;
通过采用上述技术方案,在上通道口和下通道口处分别对轻质杂质和重质杂质进行分离,省时省力,治理效果好。
所述处理腔的入料口处设有用于去除包裹在杂质表面淤泥的蠕动消化组件,所述蠕动消化组件包括两组密封蠕动层,两组所述密封蠕动层之间形成消化腔,所述消化腔与口腔和处理腔均处于连通状,两组密封蠕动层的截面均呈波纹形结构,所述密封蠕动层上设有用于驱动两组密封蠕动层发生蠕动的第一驱动组件。
通过采用上述技术方案,利用第一驱动组件,使密封蠕动层发生不同程度上的变形,并带着消化腔的内部空间发生不同程度上的扩充和压缩,当消化腔的内部空间缩小时,通过仿“胃蠕动消化”的方式,使密封蠕动层的内表面与黑臭水中的杂质相挤压,用于碾碎附着在杂质表面的有害物质,当消化腔的内部空间扩大时,通过仿“喉咙吞咽”的方式,密封蠕动层会将碾碎后的杂质以及淤泥一同通入到处理腔的内部,用于快速分离杂物和附着在杂质表面的淤泥。
优选的,所述流通鳃为片状结构,若干组所述流通鳃之间呈平行状分布,且相邻所述流通鳃之间形成供黑臭水穿过的水流路径,所述水流路径与张合块的外部空间连通。
通过采用上述技术方案,进入到口腔内的黑臭水会顺着水流路径并与流通鳃的表面接触,通过流通鳃,滤除黑臭水中的细小杂质以及细小微生物。
优选的,所述流通鳃包括设于张合块上的万向节,所述万向节上设有连接杆,所述连接杆上设有柔性鳃体,所述柔性鳃体的内部设有总管,所述总管的输出端连接有若干组分流管,所述分流管的输出端连接有喷口,所述喷口位于柔性鳃体上,所述总管的输入端连接有第一负压泵,所述第一负压泵的输入端连接有用于储存化学絮凝剂的化学絮凝剂存储箱,所述喷口设置有若干组,且均匀分布在柔性鳃体的外边缘处。
通过采用上述技术方案,通过万向节,使流通鳃在流通缺口内扇动,加速释放化学絮凝剂。
优选的,所述柔性鳃体为柔性材质,所述柔性鳃体的表面设有呈条纹形的丝状活性炭吸附纤维,相邻两组丝状活性炭吸附纤维之间形成用于吸附并容纳杂质的凹陷纹路。
通过采用上述技术方案,当黑臭水穿过水流路径时,黑臭水内的杂质会与柔性鳃的表面相接触,并借助丝状活性炭吸附纤维,实现对杂质的吸附,而设置的凹陷纹路中可增大吸附杂质的面积。
优选的,所述张合块上且靠近所述流通缺口处转动设有密封板,所述密封板与张合块之间通过驱动转轴转动连接。
通过采用上述技术方案,通过控制密封板与缺口之间的打开程度,控制吸附杂质后且携带化学絮凝剂的水体的流速。
优选的,所述第一驱动组件包括主动轮和若干组从动轮,所述主动轮和若干组从动轮之间通过皮带转动设置,所述从动轮上设有两组限位杆,所述两组限位杆之间设有贴合滚轮,所述贴合滚轮转动设置在限位杆的自由端。
通过采用上述技术方案,利用主动轮的转动,驱动若干组从动轮,并连带着限位杆做圆周转动,连带贴合滚轮与密封蠕动层之间产生滚动摩擦,从而使两组密封蠕动层发生不同程度上的蠕动。
优选的,两组所述密封蠕动层相对里面上设有若干组半球状凸起部,所述半球状凸起部的内部设有喷药管,所述潜水机架的内部设有用于存储微生物复合菌液的药箱,所述药箱的输出端与喷药管相连通,所述药箱和喷药管之间通过第二负压泵连接。
通过采用上述技术方案,当两组密封蠕动层发生蠕动时,两组密封蠕动层表面的半球状凸起部相互接触,通过仿“牛肚结构”的方式,便于快速分离杂质上附着的淤泥,并通过第二负压泵,将药箱内的微生物复合菌液通入到消化腔的内部,使微生物复合菌液与杂质充分接触,并借助水流,便于快速剥离杂质表面的淤泥。
优选的,所述上通道口上拆卸设有捕捉网,所述下通道口的内部设有粉碎转轴。
通过采用上述技术方案,利用捕捉网,可收集潜水机架内的轻质杂质,利用粉碎转轴,可破碎杂质,并将破碎后的杂质重新排放至淤泥中,粘附在杂质表面的微生物复合菌液重新回到黑臭水体中,用于全方位净化黑臭水体。
优选的,所述潜水机架的尾部设有旋片真空泵,所述潜水机架的头部设有声呐探测仪,所述潜水机架上设有照明灯和无线摄像机。
通过采用上述技术方案,利用旋片真空泵,可驱动潜水机架,使潜水机架在黑臭水体内自由穿梭,利用设置在潜水机架的头部的声呐探测仪,用于探测黑臭水体内的深度以及大型杂质,便于潜水机架定向定点清理,利用设置在潜水机架上的照明灯和无线摄像机,用于清楚的观测黑臭水下状况。
优选的,该黑臭水体治理设备的黑臭水体治理方法,其黑臭水体治理步骤包括:
S1:利用无线电进行远程控制潜水机架在黑臭水体内的具体方位,并通过驱动旋片真空泵,在处理腔的内部形成负压,使得黑臭水穿过张合块并吸入到处理腔的内部;
S2:当黑臭水进入到张合块的内时,利用设置在张合块两侧且仿“鲶鱼的鱼鳃结构”的流通鳃,初步滤除黑臭水中的细小杂质以及细小微生物,以获得初滤水体;
S3:一部分的初滤水体通过流通缺口,连带用于净化黑臭水的化学絮凝剂一同释放至黑臭水体中,用于初步净化水体;
大部分的初滤水体通过负压进入到消化腔的内部,利用两组密封蠕动层之间相互研磨,通过仿“胃蠕动消化”的方式,快速分离杂质上附着的淤泥,并利用喷药管,将微生物复合菌液释放至消化腔的内部,用于降解分离后的淤泥,以获得终滤水体;
S4:终滤水体在处理腔的内部沉积,终滤水体中的轻质杂质悬浮在上通道口处,并收集在捕捉网内,终滤水体中的重质杂质沉淀在下通道口处,并通过粉碎转轴,连带微生物复合菌液一同排放至黑臭水体中,用于全方位净化黑臭水体。
通过采用上述技术方案,该黑臭水体治理方法,通过借助远程控制的黑臭水体治理设备,将黑臭水体吸入到该黑臭水体治理设备的内部,经过滤除水体中的杂质以及分区域释放化学絮凝剂和微生物复合菌液,从而达到不同程度上黑臭水体净化治理,不仅仅可操作性强,另外,相比较人工打捞杂质以及乘船抛洒化学絮凝剂而言,该种黑臭水体治理方法,更加方便,治理效果更加高效。
综上所述,本申请具有以下有益效果:
1.通过设置有可远程控制的潜水机架,穿梭在水体的任意位置,并可通过内部设置的处理腔,用于治理黑臭水,并在上通道口和下通道口处对轻重杂质进行分离,省时省力,治理效果好,当该潜水机架下潜到黑臭水体的中下层位置时,通过蠕动消化组件,去除沉积在杂质表面的淤泥,并释放微生物复合菌液,使其到达黑臭水体的中下层位置,通过设置在张合块两侧且仿“鲶鱼的鱼鳃结构”的流通鳃,分泌释放用于净化黑臭水的化学絮凝剂,并伴随滤除杂质后的水流排出张合块,排出后的化学絮凝剂会进入到黑臭水体中,用于全方面净化黑臭水体。
2.该黑臭水体治理方法,通过借助远程控制的黑臭水体治理设备,将黑臭水体吸入到该黑臭水体治理设备的内部,经过滤除水体中的杂质以及分区域释放化学絮凝剂和微生物复合菌液,从而达到不同程度上黑臭水体净化治理,不仅仅可操作性强,另外,相比较人工打捞杂质以及乘船抛洒化学絮凝剂和微生物复合菌液而言,该种黑臭水体治理方法,更加方便,治理效果更加高效。
附图说明
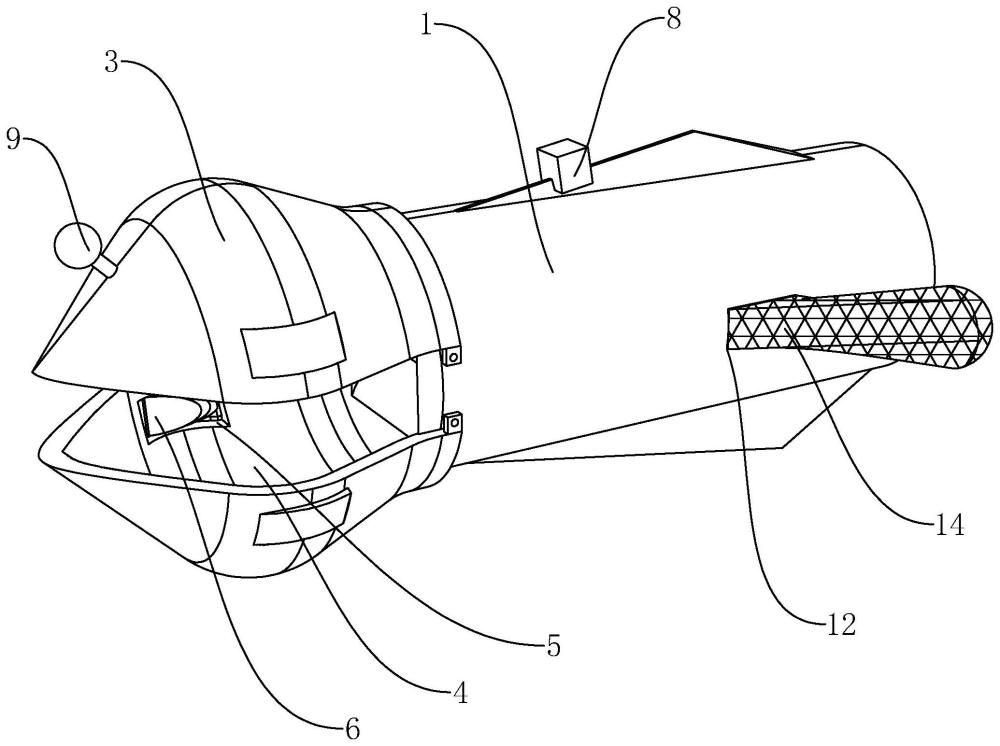
图1是本实施例中黑臭水体治理设备的整体结构示意图;
图2是本实施例中潜水机架的剖视图;
图3是本实施例中张合块的剖视图;
图4是本实施例中张合块的整体结构示意图;
图5是本实施例中柔性鳃体的整体结构图;
图6是本实施例中柔性鳃体的内部结构图;
图7是本实施例中第一驱动结构的整体结构示意图;
图8是本实施例中药箱与第二负压泵的连接结构示意图。
附图标记说明:1、潜水机架;2、处理腔;3、张合块;4、凹陷部;5、流通缺口;6、流通鳃;601、万向节;602、连接杆;603、柔性鳃体;604、总管;605、分流管;606、喷口;607、第一负压泵;608、化学絮凝剂存储箱;609、丝状活性炭吸附纤维;6010、凹陷纹路;7、旋片真空泵;8、声呐探测仪;9、照明灯;10、密封板;11、蠕动消化组件;1101、密封蠕动层;1102、消化腔;1103、第一驱动组件;11031、主动轮;11032、从动轮;11033、皮带;11034、限位杆;11035、贴合滚轮;1104、半球状凸起部;1105、喷药管;1106、药箱;1107、第二负压泵;12、上通道口;13、下通道口;14、捕捉网;15、粉碎转轴。
具体实施方式
下面结合附图对本申请作进一步详细描述,有必要在此指出的是,以下具体实施方式只用于对本申请进行进一步的说明,不能理解为对本申请保护范围的限制,该领域的技术人员可以根据上述申请内容对本申请作出一些非本质的改进和调整。
本发明公开一种黑臭水体治理设备,如图1-图2所示,包括潜水机架1,潜水机架1内部设有前后贯通的处理腔2,处理腔2的进料口且靠近潜水机架1的头部位置上设有两组呈相对设置且可发生相对转动的张合块3,张合块3的内部设有凹陷部4,当张合块3处于闭合状态时,两组张合块3上的凹陷部4形成与处理腔2的进料口相连通的口腔,当张合块3处于张开时,两组张合块3之间形成开口,根据黑丑水体的深度以及淤泥的厚度,通过控制两组张合块3之间的张合程度,伴随着潜水机架1的前进,使淤泥以及黑臭水体一同穿过开口并进入到口腔的内部;
处理腔2的入料口处设有用于去除包裹在杂质表面淤泥的蠕动消化组件11,蠕动消化组件11包括两组密封蠕动层1101,两组密封蠕动层1101之间形成消化腔1102,消化腔1102与口腔和处理腔2均处于连通状,两组密封蠕动层1101的截面均呈波纹形结构,密封蠕动层1101上设有用于驱动两组密封蠕动层1101发生蠕动的第一驱动组件1103,利用第一驱动组件1103,使密封蠕动层1101发生不同程度上的变形,并带着消化腔1102的内部空间发生不同程度上的扩充和压缩,当消化腔1102的内部空间缩小时,通过仿“胃蠕动消化”的方式,使密封蠕动层1101的内表面与黑臭水中的杂质相挤压,用于碾碎附着在杂质表面的有害物质,当消化腔1102的内部空间扩大时,通过仿“喉咙吞咽”的方式,密封蠕动层1101会将碾碎后的杂质以及淤泥一同通入到处理腔2的内部。
潜水机架1的尾部设有旋片真空泵7,利用旋片真空泵7,可驱动潜水机架1,使潜水机架1在黑臭水体内自由穿梭,利用设置在潜水机架1的头部的声呐探测仪8,用于探测黑臭水体内的深度以及大型杂质,便于潜水机架1定向定点清理,利用设置在潜水机架1上的照明灯9和无线摄像机,用于清楚的观测黑臭水下状况。
值得说明的是:该潜水机架1使用无线电进行远程控制和视频数据交换;双向无线电链路将有关潜水系统状态的指令和控制数据传送给远程操作员;对于非常长距离的潜水,也可使用卫星作为导航系统的一部分;潜水机架1的状态和动作不断地向地面站报告;基地训练有素的工作人员控制着潜水机架1,分析无线摄像机传回的图像,并根据他们所看到的情况采取行动。
潜水机架1上设有上通道口12和下通道口13,上通道口12和下通道口13均与处理腔2相连通,经过“消化”后的杂质伴随微生物复合菌液一同进入到处理腔2的内部,其中杂质包括轻质杂质和重质杂质,轻质杂质和重质杂质在处理腔2的内部处于分层状态,轻质杂质在微生物复合菌液中悬浮,并悬浮在上通道口12处,而硬质的杂质会沉积在下通道口13内,上通道口12的出口和下通道口13的出口均与潜水机架1的外部水体连通,上通道口12上拆卸设有捕捉网14,下通道口13的内部设有粉碎转轴15,利用捕捉网14,可收集潜水机架1内的轻质杂质,利用粉碎转轴15,可破碎杂质,并将破碎后的杂质重新排放至淤泥中,粘附在杂质表面的微生物复合菌液重新回到黑臭水体中,用于全方位净化黑臭水体。
潜水机架1的尾部设有旋片真空泵7,利用旋片真空泵7,可驱动潜水机架1,使潜水机架1在黑臭水体内自由穿梭,利用设置在潜水机架1的头部的声呐探测仪8,用于探测黑臭水体内的深度以及大型杂质,便于潜水机架1定向定点清理,利用设置在潜水机架1上的照明灯9和无线摄像机,用于清楚的观测黑臭水下状况。
张合块3上至少设有两组流通缺口5,流通缺口5的内部转动设有倾斜排布有若干组流通鳃6,如图3所示,流通鳃6为片状结构,流通鳃6的片面方向与流通缺口5口径之间的夹角范围为30-45°,若干组流通鳃6之间呈平行状分布,且相邻两组流通鳃6之间形成供黑臭水穿过的水流路径,水流路径与张合块3的外部空间连通,流通鳃6用于滤除黑臭水体中的杂质同时均匀释放化学絮凝剂,进入到口腔内的黑臭水会顺着水流路径并与流通鳃6的表面接触,通过流通鳃6,滤除黑臭水中的细小杂质以及细小微生物,与此同时,流通鳃6的内部会分泌释放用于净化黑臭水的化学絮凝剂,并伴随滤除杂质后的水流排出张合块3,排出后的化学絮凝剂会进入到黑臭水体中,用于全方面净化黑臭水体。
如图4所示,张合块3上且靠近流通缺口5处转动设有密封板10,密封板10与张合块3之间通过驱动转轴转动连接,通过控制密封板10与缺口之间的打开程度,控制吸附杂质后且携带化学絮凝剂的水体的流速。
如图5-图6所示,流通鳃6包括设于张合块3上的万向节601,万向节601上设有连接杆602,连接杆602上设有柔性鳃体603,连接杆602和柔性鳃体603之间可拆卸连接,柔性鳃体603的内部设有总管604,总管604的输出端连接有若干组分流管605,分流管605的输出端连接有喷口606,喷口606位于柔性鳃体603上,总管604的输入端连接有第一负压泵607,第一负压泵607的输入端连接有用于储存化学絮凝剂的化学絮凝剂存储箱608,使用时,使用者可启动第一负压泵607的电源,第一负压泵607将化学絮凝剂存储箱608的内部化学絮凝剂通入到总管604的内部,并顺着分流管605进入到喷口606内,喷口606设置有若干组,且均匀分布在柔性鳃体603的外边缘处,便于将化学絮凝剂均匀释放在黑臭水体中,柔性鳃体603为柔性材质,可选择橡胶、硅胶等材料,柔性鳃体603的表面设有呈条纹形的丝状活性炭吸附纤维609,相邻两组丝状活性炭吸附纤维609之间形成用于吸附并容纳杂质的凹陷纹路6010;当黑臭水穿过水流路径时,黑臭水内的杂质会与柔性鳃的表面相接触,并借助丝状活性炭吸附纤维609,实现对杂质的吸附,而设置的凹陷纹路6010中可增大吸附杂质的面积。
如图7所示,第一驱动组件1103包括主动轮11031和若干组从动轮11032,主动轮11031和若干组从动轮11032之间通过皮带11033转动设置,从动轮11032上设有两组限位杆11034,两组限位杆11034之间设有贴合滚轮11035,贴合滚轮11035转动设置在限位杆11034的自由端,利用主动轮11031的转动,驱动若干组从动轮11032,并连带着限位杆11034做圆周转动,连带贴合滚轮11035与密封蠕动层1101之间产生滚动摩擦,从而使两组密封蠕动层1101发生不同程度上的蠕动;
如图2-图8所示,两组密封蠕动层1101相对里面上设有若干组半球状凸起部1104,半球状凸起部1104的内部设有喷药管1105,潜水机架1的内部设有用于存储微生物复合菌液的药箱1106,药箱1106的输出端与喷药管1105相连通,药箱1106和喷药管1105之间通过第二负压泵1107连接,当两组密封蠕动层1101发生蠕动时,两组密封蠕动层1101表面的半球状凸起部1104相互接触,通过仿“牛肚结构”的方式,便于快速分离杂质上附着的淤泥,并通过第二负压泵1107,将药箱1106内的微生物复合菌液通入到消化腔1102的内部,使微生物复合菌液与杂质充分接触,并借助水流,便于快速剥离杂质表面的淤泥。
该黑臭水体治理设备的黑臭水体治理方法,其黑臭水体治理步骤包括:
S1:利用无线电进行远程控制潜水机架1在黑臭水体内的具体方位,并通过驱动旋片真空泵7,在处理腔2的内部形成负压,使得黑臭水穿过张合块3并吸入到处理腔2的内部;
S2:当黑臭水进入到张合块3的内时,利用张合块3两侧仿“鲶鱼的鱼鳃结构”的流通鳃6,初步滤除黑臭水中的细小杂质以及细小微生物,以获得初滤水体;
S3:一部分的初滤水体通过流通缺口5,连带用于净化黑臭水的化学絮凝剂一同释放至黑臭水体中,用于初步净化水体;
大部分的初滤水体通过负压进入到消化腔1102的内部,利用两组密封蠕动层1101之间相互研磨,通过仿“胃蠕动消化”的方式,快速分离杂质上附着的淤泥,并利用喷药管1105,将微生物复合菌液释放至消化腔1102的内部,用于降解分离后的淤泥,以获得终滤水体;
S4:终滤水体在处理腔2的内部沉积,终滤水体中的轻质杂质悬浮在上通道口12处,并收集在捕捉网14内,终滤水体中的重质杂质沉淀在下通道口13处,并通过粉碎转轴15,连带微生物复合菌液一同排放至黑臭水体中,用于全方位净化黑臭水体。
工作原理:使用时,使用者首先将潜水机架1放置在待治理的黑臭水体内,并启动该潜水机架1的电源,利用无线电进行远程控制潜水机架1在黑臭水体内的具体方位,并通过驱动旋片真空泵7,在处理腔2的内部形成负压,使得黑臭水穿过张合块3并吸入到处理腔2的内部;
当黑臭水进入到张合块3的内时,利用张合块3两侧仿“鲶鱼的鱼鳃结构”的流通鳃6,初步滤除黑臭水中的细小杂质以及细小微生物,以获得初滤水体;
一部分的初滤水体通过流通缺口5,连带用于净化黑臭水的化学絮凝剂一同释放至黑臭水体中,用于初步净化水体;
大部分的初滤水体通过负压进入到消化腔1102的内部,利用两组密封蠕动层1101之间相互研磨,通过仿“胃蠕动消化”的方式,快速分离杂质上附着的淤泥,并利用喷药管1105,将微生物复合菌液释放至消化腔1102的内部,用于降解分离后的淤泥,以获得终滤水体;
最后,终滤水体在处理腔2的内部沉积,终滤水体中的轻质杂质悬浮在上通道口12处,并收集在捕捉网14内,终滤水体中的重质杂质沉淀在下通道口13处,并通过粉碎转轴15,连带微生物复合菌液一同排放至黑臭水体中,用于全方位净化黑臭水体。
以上均为本申请的较佳实施例,并非依此限制本申请的保护范围,故:凡依本申请的结构、形状、原理所做的等效变化,均应涵盖于本申请的保护范围之内。
- 一种黑臭河道水体修复治理设备
- 一种黑臭水体治理设备及黑臭水体治理方法