一种应用于无人作战平台的枪械控制装置
文献发布时间:2024-01-17 01:18:42
技术领域
本发明涉及无人作战平台技术领域,特别是涉及一种应用于无人作战平台的枪械控制装置。
背景技术
无人作战平台是一种可以协助作战人员或者独立参与作战,执行侦察等军事任务的智能化武器设备,随着技术的进步,无人作战平台开始应用并逐步成为主流发展趋势。
目前的无人作战平台多搭载现有制式枪械作为火力单元,针对不同的枪械设计相应的自动击发机构,但是由于无人作战平台正处于发展阶段,对于制式枪械的控制系统并不完善,例如智能系统故障意外击发,因此需要一种具有防止意外击发安全机构的制式枪械控制装置。
发明内容
本发明的目的在于克服现有技术的不足,提供一种应用于无人作战平台的枪械控制装置,安全机构可以控制击发机构的锁定和解锁,进而避免了枪械的意外击发。
本发明的目的是这样实现的:
一种应用于无人作战平台的枪械控制装置,包括:
固定架(1),固定架(1)用于连接无人作战平台,固定架(1)的正面用于固定枪械,固定架(1)上设有导向槽(11),
击发机构(2),击发机构(2)包括设置在固定架(1)正面的扳机连杆(21)以及设置在固定架(1)背面的第一舵机(22),第一舵机(22)为自锁舵机,扳机连杆(21)上设有卡合枪械扳机的容置槽(212),扳机连杆(21)背部设有穿过导向槽(11)的导向块(211),第一舵机(22)的输出端穿过固定架(1)并通过传动组件(23)与扳机连杆(21)动力连接,第一舵机(22)用于驱动扳机连杆(21)使扳机连杆(21)沿导向槽(11)的长度方向移动以扣动扳机;
安全机构(3),安全机构(3)包括设于固定架(1)正面的第一卡合件(31)、设于扳机连杆(21)端部的第二卡合件(32),以及设于固定架(1)背面的驱动件(33),驱动件(33)的输出端穿过固定架(1)并连接第一卡合件(31),驱动件(33)用于驱动第一卡合件(31)转动,使第一卡合件(31)卡合/解脱第二卡合件(32),进而锁定/解锁扳机连杆(21)。
优选地,还包括快慢机控制机构(4),快慢机控制机构(4)包括设于固定架(1)正面的连接件(41)以及设于固定架(1)背面的第二舵机(42),第二舵机(42)为自锁舵机,第二舵机(42)的输出端穿过固定架(1)并与连接件(41)连接,连接件(41)上设有用于卡接枪械快慢机旋钮的型槽,第三舵机(42)用于通过连接件(41)调整快慢机旋钮,在枪械不需要射击时,调整快慢机旋钮至锁定位置,避免枪械意外击发。
优选地,固定架(1)正面设置腔体,固定架(1)腔体内固定有多个卡板(15),卡板(15)用于卡紧枪械。
优选地,驱动件(33)为驱动电机,驱动件(33)连接远程控制系统,当需要射击时,远程控制驱动件(33)使第一卡合件(31)脱离第二卡合件(32),此时第一舵机(22)能够控制枪械射击。
优选地,传动组件(23)包括齿轮(231)和齿条(232),齿轮(231)同轴心连接第一舵机(22)的输出端,齿条(232)设于扳机连杆(21)边缘,齿条(232)与齿轮(231)啮合,第一舵机(22)能够驱动齿轮(231)转动,并带动齿条(232)横向移动,从而控制扳机连杆(21)横向移动以扣动扳机。
优选地,第一卡合件(31)为棘爪,第二卡合件(32)为棘轮,扳机连杆(21)端部设有连接轴(213),棘轮固定在连接轴(213)上,棘轮的一个齿与棘爪对应配合。
优选地,固定架(1)上固定连接有轴套(121),驱动件(33)的输出端穿过轴套(121),所述安全机构(3)还包括自动回弹结构(34),自动回弹结构(34)包括弹性件和限位件(341),弹性件连接在固定架(1)和第一卡合件(31)之间,用于在常态下,通过弹力使第一卡合件(31)卡合第二卡合件(32),限位件(341)设置在轴套(121)和第一卡合件(31)之间,用于限制第一卡合件(31)的最大转动角度,使第一卡合件(31)不会完全错开对应的棘轮齿,驱动件(33)驱动第一卡合件(31)转动脱离第二卡合件(32)后,且驱动件(33)停止工作时,弹性件拉动第一卡合件(31)以迫使其沿相反方向转动,从而扣合第二卡合件(32),限位件(341)包括设置在轴套(121)端部的第一限位块(3411)以及设置在第一卡合件(31)上的第二限位块(3412),第一限位块(3411)配合第二限位块(3412),当弹性件拉动第一卡合件(31)转动时,第二限位块(3412)跟随转动,当第二限位块(3412)抵触第一限位块(3411)时,第一卡合件(31)转动至最大角度,恢复到初始位置,避免第一卡合件(31)转动角度过大,导致第二卡合件(32)无法卡合第一卡合件(31)。
优选地,弹性件采用拉簧或扭簧。
优选地,扳机连杆(21)远离第二卡合件(32)的一端并列设置有第一夹块(214)、第二夹块(215),第一夹块(214)、第二夹块(215)之间形成容置槽(212)。
由于采用了上述技术方案,本发明通过在固定架上设置击发机构和安全机构,使得安全机构可以控制击发机构的锁定和解锁,进而避免了枪械的意外击发。
附图说明
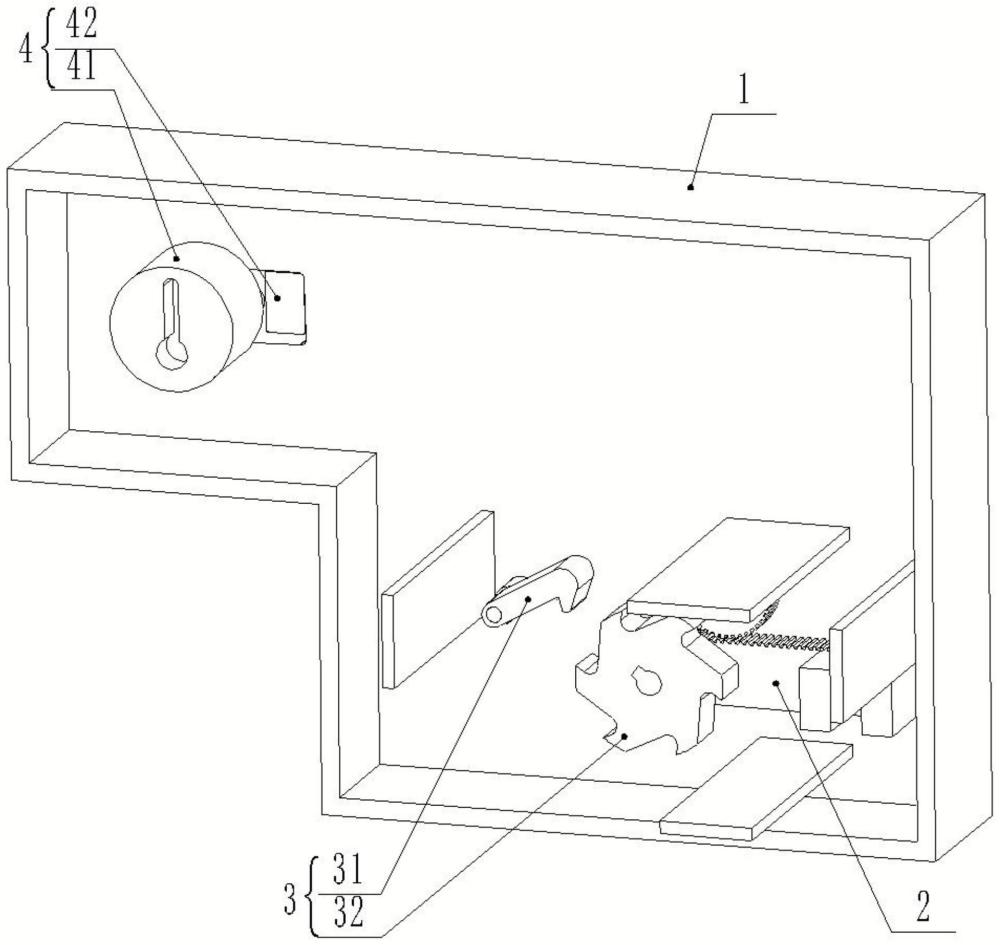
图1为本发明实施方式提供的枪械控制装置的立体结构示意图;
图2为本发明实施方式提供的枪械控制装置另一角度的立体结构示意图;
图3为本发明实施方式提供的固定架的立体结构示意图;
图4为本发明实施方式提供的固定架的另一角度的立体结构示意图;
图5为本发明实施方式提供的击发机构的结构分解图;
图6为本发明实施方式提供的击发机构和安全机构的立体结构示意图;
图7为本发明实施方式提供的安全机构的立体结构示意图;
图8为本发明实施方式提供的击发机构的立体结构示意图。
附图标记
1-固定架;11-导向槽;12-第一通孔;121-轴套;13-第二通孔;14-第三通孔;15-卡板;16-立柱;
2-击发机构;21-扳机连杆;211-导向块;212-容置槽;213-连接轴;214-第一夹块;215-第二夹块;22-第一舵机;23-传动组件;231-齿轮;232-齿条;
3-安全机构;31-第一卡合件;32-第二卡合件;33-驱动件;34-自动回弹结构;341-限位件;3411-第一限位块;3412-第二限位块;
4-快慢机控制机构;41-连接件;42-第二舵机。
具体实施方式
参见图1至图8,本实施方式提供一种应用于无人作战平台的枪械控制装置,包括固定架1、击发机构2、安全机构3和快慢机控制机构4。
固定架1用于连接无人作战平台,固定架1上设有导向槽11、第一通孔12、第二通孔13和第三通孔14。
击发机构2包括设置在固定架1正面的扳机连杆21以及设置在固定架1背面的第一舵机22,扳机连杆21卡合扳机,其背部设有穿过导向槽11的导向块211,第一舵机22的输出端穿过第一通孔12并通过传动组件23传动连接扳机连杆21,第一舵机22用于驱动扳机连杆21使其沿导向槽11的长度方向移动以扣动扳机。
安全机构3,包括设于固定架1正面的第一卡合件31、设于扳机连杆21端部的第二卡合件32、以及设于固定架1背面的驱动件33,驱动件33的输出端穿过第二通孔13并连接第一卡合件31,驱动件33用于驱动第一卡合件31转动以使其卡合第二卡合件32或与之分离以锁定扳机连杆21的移动或将其解锁。
快慢机控制机构4,包括设于固定架1正面的连接件41以及设于固定架1背面的第二舵机42,第二舵机42的输出端穿过第三通孔14并连接连接件41背部,连接件41的正面开设有用于放置快慢机旋钮的型槽。
其中,固定架1正面可以设置腔体,用于套设制式枪械,击发机构2、安全机构3和快慢机控制机构4的驱动系统均安装在固定架1的背面,从而缩减了其正面腔体的使用空间,初始状态下,第一卡合件31卡合第二卡合件32,限制了扳机连杆21的移动,此时扳机便无法运动,从而避免意外击发,当驱动件33驱动第一卡合件31使其脱离第二卡合件32时,扳机连杆21可以移动,此时第一舵机22可以驱动扳机连杆21横向移动使其扣动扳机,从而实现击发,当击发结束,第一卡合件31可以继续卡合住第二卡合件32,从而锁定扳机连杆21的横向移动。
其中,驱动件33可以是驱动电机,驱动件33可以连接远程控制系统,通过远程控制驱动件33,当需要射击时,可以远程控制驱动件33使第一卡合件31脱离第二卡合件32,此时第一舵机22可以控制枪械射击。
其中,快慢机为控制枪械单发、连发或锁定的控制装置,通过枪械侧部的快慢机旋钮可以控制枪械的单发、连发或锁定,快慢机控制机构4通过连接件41与快慢机旋钮连接,并通过第三舵机42控制快慢机,第三舵机42可以在枪械不需要射击时调整快慢机旋钮至锁定位置,进一步避免枪械意外击发。
其中,舵机可以增加力矩,易于驱动扳机连杆21和第一卡合件31,舵机为现有技术,本实施方式不作赘述。
本实施方式提供的一种枪械控制装置,通过在固定架上设置击发机构和安全机构,使得安全机构可以控制击发机构的锁定和解锁,进而避免了枪械的意外击发。
请参见图6,传动组件23包括齿轮231和齿条232。
齿轮231同轴心连接第一舵机22的输出端。
齿条232设于扳机连杆21侧部,与齿轮231配合。
其中,第一舵机22可以驱动齿轮231转动,并带动齿条232横向移动,从而控制扳机连杆21横向移动以扣动扳机。
进一步地,扳机连杆21远离第二卡合件32一端设有容置槽212,容置槽212用于卡合扳机。
其中,容置槽212的宽度可以略大于扳机的宽度,使其易于放置扳机,同时也不会造成扳机活动过大导致意外击发。
进一步地,第二通孔12上固定连接有轴套121,驱动件33的输出端穿过轴套121,安全机构3还包括自动回弹结构34,自动回弹结构34包括弹性件和限位件341。
弹性件连接在固定架1和第一卡合件31之间,用于迫使所受第一卡合件31卡合第二卡合件32。
限位件341设置在轴套121和第一卡合件31之间,用于限制第一卡合件31的转动角度。
其中,弹性件可以是拉簧,在驱动件33驱动第一卡合件31转动脱离第二卡合件32后,且驱动件33停止工作时,弹性件可以拉动第一卡合件31以迫使其沿相反方向转动,从而扣合第二卡合件32,当第一卡合件31沿相反方向转动时,为了避免第一卡合件31转动角度过大,导致第二卡合件32无法卡合第一卡合件31,从而设置限位件341,以限制第一卡合件31的角度,使得第一卡合件31可以转动至固定位置,便于第二卡合件32卡合。
请参见图7,限位件341包括设置在轴套121端部的第一限位块3411以及设置在第一卡合件31上的第二限位块3412,第一限位块3411配合第二限位块3412。
其中,当弹性件拉动第一卡合件31转动时,第二限位块3412跟随转动,当第二限位块3412抵触第一限位块3411时,第一卡合件31转动至最大角度,即恢复到初始位置。
进一步地,第一卡合件31为棘爪,第二卡合件32为棘轮,扳机连杆21端部设有连接轴213,棘轮固定套设在连接轴213上。
其中,连接轴213可以固定在扳机连杆21上,通过棘轮固定套设在连接轴213上,使棘轮的齿面保持不同,便于卡合棘爪,棘轮和棘爪的配合使得卡合更加牢固。
请参见图3固定架1正面设有多个卡板15,卡板15用于卡紧枪械,卡板15可以与固定架1一体连接。
请参见图6,扳机连杆21远离第二卡合件32一端并列设置有第一夹块214和第二夹块215,第一夹块214和第二夹块215之间形成容置槽212。
其中,第一夹块214和第二夹块215的高度均大于扳机的厚度,以避免卡合扳机时扳机滑脱。
进一步地,第一舵机22和第二舵机42均为自锁舵机。
其中,自锁舵机能够在断电的情况下自锁,使得断电时扳机连杆21和连接件41均无法运动,从而避免断电时扳机意外活动导致意外击发。
进一步地,固定架1背面设有多个立柱16,第一舵机22、驱动件33和第二舵机42通过螺栓连接立柱16。
最后说明的是,以上优选实施例仅用以说明本发明的技术方案而非限制,尽管通过上述优选实施例已经对本发明进行了详细的描述,但本领域技术人员应当理解,可以在形式上和细节上对其作出各种各样的改变,而不偏离本发明权利要求书所限定的范围。
- 一种应用于波浪能剖面浮标的钢缆单双向控制装置及浮标平台
- 一种小微型无人机作战发射装置
- 一种基于约束跟随的无人作战平台避障-到达控制方法
- 一种应用于无人机的无后座力枪械