一种同步电机转子角度的获取装置及获取方法
文献发布时间:2024-04-18 19:44:28
技术领域
本发明涉及同步电机参数获取领域,更具体地讲,涉及一种同步电机转子角度的获取装置及获取方法。
背景技术
编码器具有体积小,精密度高,分辨度高,使用寿命长等优点。因此,编码器已经在越来越多的行业广泛应用,并逐渐趋于智能化。
传统的编码器多应用三个开关霍尔传感器或者六个线性霍尔传感器,尤其是开关霍尔传感器,结构单调,功能单一。单独运用三个开关霍尔传感器反应在磁场上为“有”与“无”,没有中间值,只能提供六个绝对位置,精度不高,且易受温度等因素影响使得设定值漂移,灵敏度下降;单独运用六个线性霍尔传感器能够反馈磁场的强度,数据精度高,但是成本较高,经济意义较低。所以,传统的编码器已不能满足人们对智能化生活的追求。
发明内容
针对现有技术中的不足,本发明提供了一种同步电机转子角度的获取装置及获取方法,以解决现有技术中编码器功能单一、易受温度和磁场等因素干扰降低采集精度的技术问题。
本发明提供了一种同步电机转子角度的获取装置,包括:三个开关霍尔传感器、三个线性霍尔传感器;
三个开关霍尔传感器、三个线性霍尔传感器交替均匀分布在同步电机的定子上,用于检测同步电机的磁环发出的电信号。
可选地,一个线性霍尔传感器安装在同步电机的定子的α-β静止坐标系的α轴上;所述开关霍尔传感器和所述线性霍尔传感器从所述α轴开始逆时针每60°交替分布在同步电机的定子上。
本发明还提供了一种同步电机转子角度的获取方法,包括如下步骤:
步骤1:根据开关霍尔传感器、线性霍尔传感器产生的信号获取角度估算偏差,并根据角度估算偏差获取偏差类别;
步骤2:根据偏差类判断是否需要进行补偿,当需要补偿时,计算补偿值,根据补偿值计算转子的角度估算值;当不需要补偿时,直接计算转子的角度估算值。
可选地,所述步骤1中利用开关霍尔传感器和线性霍尔传感器产生的电流波形判断是否存在角度估算偏差及分辨偏差类别,具体步骤如下:
只需选择任一相作为判断相,判断判断相的开关霍尔传感器的电流波形在第一个上升沿处是否与线性霍尔传感器的电流波形在X轴上相交:
当不相交时,则偏差类别为相位滞后的偏差;
当相交,判断开关霍尔传感器与线性霍尔传感器的两个电流波形的峰值是否相等:当不相等时,则偏差类别为y轴上的偏差;当相等时,则偏差类别为无偏差。
可选地,所述步骤2具体步骤如下:
当偏差类别为无偏差时,则直接计算测出转子角度估算值;
当偏差类别为相位滞后的偏差时,则先计算转子角度估算值,再进行补偿,将补偿后的转子角度估算值作为最终值;
当偏差类别为y轴上的偏差时,则在计算转子角度估算值过程中进行补偿。
可选地,所述步骤2中当偏差类别为无偏差时,则直接计算测出转子的角度估算值,具体步骤如下:
步骤A21:分别计算三相的初步转子估算角度,具体公式如下:
式中,“x
“y
“z
“A”为判断相的电流峰值;
步骤A22:根据关系式从初步转子估算角度中选择正确的转子估算角度,关系式具体如下:
当满足式(1)、式(2)、式(3)、式(4)中任一关系式时,则正确的转子估算角度为x
可选地,所述步骤2中当偏差类别为相位滞后的偏差时,则先计算转子角度估算值,再进行补偿,将补偿后的转子角度估算值作为最终值,具体步骤如下:
步骤B21:根据如下公式计算偏差值为:
p
其中,“p
步骤B22:分别计算三相的初步转子估算角度,具体公式如下:
式中,“x
“y
“z
“A”为判断相的电流峰值;
步骤B23:根据关系式从初步转子估算角度中选择正确的转子估算角度,关系式具体如下:
当满足式(1)、式(2)、式(3)、式(4)中任一关系式时,则正确的转子估算角度为x
步骤B24:当正确的转子估算角度为x
x
其中,“x
当正确的转子估算角度为x
x
其中,“x
可选地,所述步骤2中当偏差类别为y轴上的偏差时,则在计算转子角度估算值过程中进行补偿,具体步骤如下:
步骤C21:计算每相在y轴的偏差值,具体公式如下:
式中,“k”为当前相在y轴上的偏差值,“a”为当前相的一个峰值,“b”为当前相与“a”相邻的一个峰值;“A”为判断相的电流峰值;
步骤C22:分别计算三相的初步转子估算角度,具体公式如下:
式中,“x
“y
“z
“A”为判断相的电流峰值;
步骤C23:根据关系式从初步转子估算角度中选择正确的转子估算角度,关系式具体如下:
当满足式(1)、式(2)、式(3)、式(4)中任一关系式时,则正确的转子估算角度为x
本发明至少包括以下有益效果:
1、本发明混合运用所述线性和开关霍尔传感器,与传统方案相比,采集的数据更为全面,传统方案要两个装置才能采集相应的数据,浪费成本,装置不精简;
2、本发明以所述开关霍尔传感器的上升信号为参照点,若存在偏差,即为此时所述线性霍尔传感器产生的信号值,读出即可,节省时间,具有经济可行性;
3、本发明以线性霍尔响应信号作为主要位置信息,以所述开关霍尔传感器产生的信号矫正线性霍尔信号,有效确保霍尔传感器的应用效果,让霍尔效应原理的应用优势得以充分发挥。
附图说明
通过参考附图会更加清楚的理解本发明的特征和优点,附图是示意性的而不应理解为对本发明进行任何限制,在附图中:
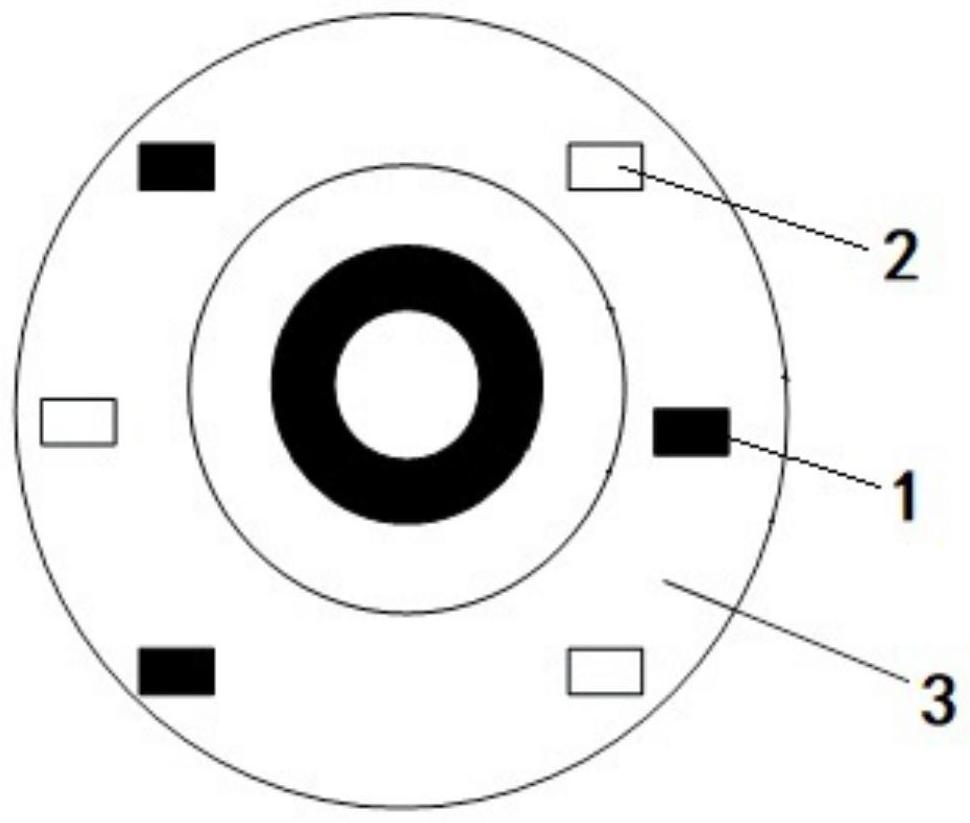
图1为本发明具体实施的结构示意图;
图2为本发明具体实施的流程图;
图3为本发明具体实施的判断电流波形是否存在角度估算偏差及分辨偏差类别的流程图;
图4为本发明具体实施的根据角度估算的偏差情况,进行相对应的角度估算值的补偿的方法流程图。
具体实施方式
为使本发明实施例的目的、技术方案和优点更加清楚,下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域技术人员在没有作出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
下面结合具体实施例,进一步阐明本发明。本领域的技术人员应该了解这些实施例仅用于说明本发明而不用于限制本发明的范围,对本发明的各种等价形式的修改均落于本申请所附权利要求书所限定的范围。
本发明提供了一种同步电机转子角度的获取装置,包括:三个开关霍尔传感器1、三个线性霍尔传感器2;三个开关霍尔传感器1、三个线性霍尔传感器2交替均匀分布在同步电机的定子3上,用于检测同步电机的磁环发出的电信号;一个线性霍尔传感器2安装在同步电机的定子3的静止坐标系的轴上;开关霍尔传感器1和线性霍尔传感器2从轴开始逆时针每60°交替分布在同步电机的定子3上。
如图2所示,一种同步电机转子角度的获取方法,使用方法包括如下步骤:
步骤S1:根据开关霍尔传感器、线性霍尔传感器产生的信号获取角度估算偏差,并根据角度估算偏差获取偏差类别;
步骤S2:根据偏差类判断是否需要进行补偿,当需要补偿时,计算补偿值,根据补偿值计算转子的角度估算值;当不需要补偿时,直接计算转子的角度估算值。
如图3所示,可选地,步骤S1中利用开关霍尔传感器、线性霍尔传感器产生的信号获取角度估算偏差,具体步骤如下:
只需选择任一相作为判断相,判断判断相的开关霍尔传感器的电流波形在第一个上升沿处是否与线性霍尔传感器的电流波形在X轴上相交:
当不相交时,则偏差类别为相位滞后的偏差;
当相交,判断开关霍尔传感器与线性霍尔传感器的两个电流波形的峰值是否相等:当不相等时,则偏差类别为y轴上的偏差;当相等时,则偏差类别为无偏差。
如图4所示,可选地,步骤S2中根据角度估算的偏差情况,进行相对应的角度估算值的补偿,具体步骤如下:
步骤S21:开关霍尔传感器产生方波,线性霍尔传感器产生正弦波,只需选择A相某个峰值的角度值作为基准点,即转子估算角度为0度,比较两者峰值和角度;
当偏差类别为无偏差时,则直接计算测出转子角度估算值;
当偏差类别为相位滞后的偏差时,则先计算转子角度估算值,再进行补偿,将补偿后的转子角度估算值作为最终值;
当偏差类别为y轴上的偏差时,则在计算转子角度估算值过程中进行补偿。
步骤S22中在无偏差情况,测出转子的角度估算值,具体步骤如下:
步骤SA21:分别计算三相的初步转子估算角度,具体公式如下:
式中,“x
“y
“z
“A”为判断相的电流峰值;
步骤SA22:根据关系式从初步转子估算角度中选择正确的转子估算角度,关系式具体如下:
当满足式(1)、式(2)、式(3)、式(4)中任一关系式时,则正确的转子估算角度为x
例如,当示波器测出的A、B、C三相的当前电流值分别为i
x
y
z
满足y
步骤S2中当偏差类别为相位滞后的偏差时,则先计算转子角度估算值,再进行补偿,将补偿后的转子角度估算值作为最终值,具体步骤如下:
步骤SB21:根据如下公式计算偏差值为:
p
其中,“p
步骤SB22:分别计算三相的初步转子估算角度,具体公式如下:
式中,“x
“y
“z
“A”为判断相的电流峰值;
步骤SB23:根据关系式从初步转子估算角度中选择正确的转子估算角度,关系式具体如下:
当满足式(1)、式(2)、式(3)、式(4)中任一关系式时,则正确的转子估算角度为x
步骤SB24:当正确的转子估算角度为x
x
其中,“x
当正确的转子估算角度为x
x
其中,“x
例如,当A相开关霍尔传感器与线性霍尔传感器的相交点的角度值q
x
y
z
满足y
A相偏差值p
90°-(150°-90°)=30°
补偿过后的角度x
30°-30°=0
步骤2中当偏差类别为y轴上的偏差时,则在计算转子角度估算值过程中进行补偿,具体步骤如下:
步骤SC21:计算每相在y轴的偏差值,具体公式如下:
式中,“k”为当前相在y轴上的偏差值,“a”为当前相的一个峰值,“b”为当前相与“a”相邻的一个峰值;“A”为判断相的电流峰值;
步骤SC22:分别计算三相的初步转子估算角度,具体公式如下:
式中,“x
“y
“z
“A”为判断相的电流峰值;
步骤SC23:根据关系式从初步转子估算角度中选择正确的转子估算角度,关系式具体如下:
当满足式(1)、式(2)、式(3)、式(4)中任一关系式时,则正确的转子估算角度为x
例如,取A、B、C三相的一个峰值分别为a
k
A、B、C三相的补偿过后的角度估算值x
x
y
z
满足y
虽然结合附图描述了本发明的实施例,但是本领域技术人员可以在不脱离本发明的精神和范围的情况下作出各种修改和变型,这样的修改和变型均落入由所附权利要求所限定的范围之内。
- 一种植入式控制系统数据获取装置及数据获取方法
- 图像获取方法、图像获取装置、结构光组件及电子装置
- 一种图像获取控制方法、装置及拍摄装置、存储介质
- 一种校正关系获取装置、方法及校正光探测元件的装置
- 图像获取装置和图像获取方法
- 一种同步电机转子角度的获取装置及获取方法
- 获取永磁同步电机的转子初始位置角的方法和装置