一种基于齿轮齿条啮合的断路器用微型电动操作机构
文献发布时间:2023-06-19 09:27:35
技术领域
本发明涉及一种微型电动操作机构,具体而言,涉及一种基于齿轮齿条啮合的断路器用微型电动操作机构。
背景技术
传统断路器电动操作机构的工作机理是:通过电动操作机构的电机旋转运动,推动连杆动作拉动断路器手柄,实现断路器分、合闸操作;在操作过程中,连杆需要通过铆接在手柄上的光轴进行上/下、前/后的位移运动。在上述动作过程中,拉动与推动的两种方式都会造成连杆端部位置不可控,动作位置的差异性会造成对断路器分、合闸位置状态识别错误的隐患,从而产生分、合闸虚位现象。
例如公开号为CN 102290298 A的中国发明专利申请,其公开了一种微型断路器用电动操作机构的传动机构,包括有壳体,壳体内安装有驱动电机,壳体上安装有可绕固定轴旋转的手柄,手柄下端安装有齿轮且位于壳体内,所述驱动电机的输出轴上安装有拐壁和与之配套的主动齿轮,主动齿轮与齿轮啮合,拐壁与主动齿轮的配套装置之间设有间隙,该传动机构结构简单、成本低。但是该传动机构在主动齿轮停止转动时需进行手动分合闸,其存在一定的危险性而且工作效率低。
又例如授权公告号为CN 205376435 U的中国实用新型专利,其公开了一种断路器用电动操作机构,包括有壳体,壳体内设置有电机、齿轮减速机构、驱动手柄及扇形齿轮,齿轮减速机构包括有若干个减速齿轮,还包括脱扣装置,脱扣装置包括脱扣驱动件及脱扣回转跳扣,脱扣驱动件与脱扣回转手柄同轴活动连接,脱扣驱动件为齿轮结构且与减速齿轮传动啮合,脱扣驱动件上设置有用于拨动脱扣回转跳扣摆动的拨块,壳体上设置有与脱扣回转跳扣对应且呈弧形结构的孔;所述的扇形齿轮与减速齿轮传动啮合,还包括对回转控制盘的分闸状态进行锁定的锁止扣,且当电动操作机构的手柄遭到破坏时,无法通过断路器的手柄进行强制合闸的电动操作机构。但是该操作机构中采用扇形齿轮与减速齿轮啮合的方式,扇形齿轮的精度不高,而且运动方式为摆动,会造成动作位置的差异性会造成对断路器分、合闸位置状态识别错误的隐患。
发明内容
基于上述问题,本发明提供一种基于齿轮齿条啮合的断路器用微型电动操作机构,旨在解决拉动与推动的两种方式都会造成连杆端部位置不可控,动作位置的差异性会造成对断路器分、合闸位置状态识别错误的隐患,从而产生分、合闸虚位的问题。为此,本发明采用如下的技术方案。
本发明的基于齿轮齿条啮合的断路器用微型电动操作机构,其包括电动操作机构本体,该本体包括断路器用机械连杆机构、手柄、回转板和断路器用触头盒,所述电动操作机构固定在断路器中盖上;所述断路器用机械连杆机构通过一轴固定在断路器用触头盒上;所述电动操作机构通过内部齿轮组传动带动规定在所述回转板上的手柄摆动,通过回转板的摆动带动断路器用机械连杆机构运动,控制断路器用触头盒分/合闸操作,所述手柄的顶部或者左右两侧安装有与齿轮啮合的齿条,通过齿轮箱内置电机的正、反向旋转,带动与回转板固定在一起的手柄组合件,围绕机械连杆机构侧板上的旋转中心进行左、右往返摆动,实现断路器分合操作;同时电动操作机构内部的电路板上安装有霍尔传感器或光感感应装置,可以准确感知断路器动作的位置。通过齿轮齿条啮合传动,及霍尔传感器或光感感应装置位置信息感知,既能保证分合闸操作位置的确定性与一致性,又能确保断路器位置精度识别的可靠性,可以彻底解决传统断路器电动操作机构分、合闸虚位的问题。
优选的是,所述电动操作机构本体分为第一电动操作机构和第二电动操作机构,第一电动操作机构包括第一手柄、第一回转板、第一断路器用机械连杆机构和第一断路器用触头盒;第二电动操作机构包括第二手柄、第二回转板、第二断路器用机械连杆机构和第二断路器用触头盒。
在上述任一方案中优选的是,当齿条位于所述手柄的顶部时,所述齿条选用第一齿条,第一齿条与第一手柄、第一回转板形成组合件,该组合件上设有霍尔感应单元;当齿条位于手柄的左右两侧时,所述齿条选用第二齿条,第二齿条与第二手柄、第二回转板形成组合件,第二手柄上设有光感感应单元。
在上述任一方案中优选的是,所述第二手柄的内壁上设有定位凸台,通过螺钉将第二回转板与其紧密连接,二者整体构成组合件。
在上述任一方案中优选的是,所述第一电动操作机构的电路板上设有霍尔接收单元;第二电动操作机构的电路板上设有光感接收单元。
在上述任一方案中优选的是,所述第一电动操作机构中还包括第一电机和第一齿轮;第二电动操作机构还包括第二电机和第二齿轮。
在上述任一方案中优选的是,所述齿轮与齿条的配合方式包括上下和左右两种方式,当所述齿轮在上时,所述齿条在下;当所述齿轮在中间位置时,两段齿条分布在齿轮的左右两侧。
在上述任一方案中优选的是,所述齿轮的直径为13-18毫米;齿条边长为49-56毫米。
在上述任一方案中优选的是,所述第一电动操作机构的尺寸为70毫米×80毫米×56毫米,其与断路器用机械连杆机构、手柄、回转板组合后的整体尺寸为70毫米×80毫米×74毫米。
在上述任一方案中优选的是,所述第二电动操作机构的尺寸为119毫米×85毫米×53毫米,其与断路器用机械连杆机构、手柄、回转板组合后的整体尺寸为119毫米×85毫米×94毫米。
附图说明
现在将描述如本发明的优选但非限制性的实施例,本发明的这些和其他特征方面和优点在参考附图阅读如下详细描述时将变得显而易见,其中:
图1为按照本发明的基于齿轮齿条啮合的断路器用微型电动操作机构的一优选实施例的结构示意图。
图2为按照本发明的基于齿轮齿条啮合的断路器用微型电动操作机构的图1所示优选实施例中手柄的结构示意图。
图3为按照本发明的基于齿轮齿条啮合的断路器用微型电动操作机构的图2所示优选实施例中霍尔感应单元的安装示意图。
图4为按照本发明的基于齿轮齿条啮合的断路器用微型电动操作机构的图1所示优选实施例中光感感应单元的安装示意图。
图5为按照本发明的基于齿轮齿条啮合的断路器用微型电动操作机构的图1所示优选实施例的动作示意图。
图6为按照本发明的基于齿轮齿条啮合的断路器用微型电动操作机构的另一优选实施例的结构示意图。
图7为按照本发明的基于齿轮齿条啮合的断路器用微型电动操作机构的图6所示优选实施例中手柄的结构示意图。
图8为按照本发明的基于齿轮齿条啮合的断路器用微型电动操作机构的图6所示优选实施例中手柄与回转板组合件的结构示意图。
图9为按照本发明的基于齿轮齿条啮合的断路器用微型电动操作机构的图6所示优选实施例的动作示意图。
具体实施方式
以下的说明本质上仅仅是示例性的而并不是为了限制本公开、应用或用途。应当理解的是,在全部附图中,对应的附图标记表示相同或对应的部件和特征。
实施例一:
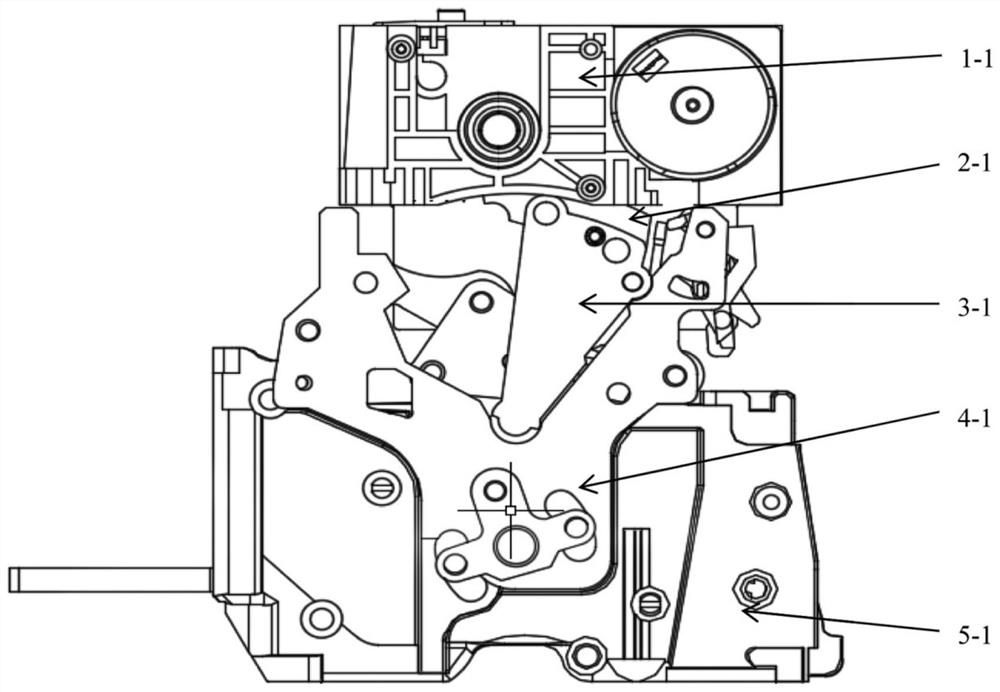
现在参考附图,图1-图5描述了本发明的基于齿轮齿条啮合的断路器用微型电动操作机构的结构示意图。一种基于齿轮齿条啮合的断路器用微型电动操作机构,其包括电动操作机构本体,该本体包括断路器用机械连杆机构、手柄、回转板和断路器用触头盒,所述电动操作机构固定在断路器中盖上;所述断路器用机械连杆机构通过一轴固定在断路器用触头盒上;所述电动操作机构通过内部齿轮组传动带动规定在所述回转板上的手柄摆动,通过回转板的摆动带动断路器用机械连杆机构运动,控制断路器用触头盒分/合闸操作,所述手柄的顶部安装有与齿轮啮合的齿条,通过齿轮箱内置电机的正、反向旋转,带动与回转板固定在一起的手柄组合件,围绕机械连杆机构侧板上的旋转中心进行左、右往返摆动,实现断路器分合操作;同时电动操作机构内部的电路板上安装有霍尔传感器或光感感应装置,可以准确感知断路器动作的位置。通过齿轮齿条啮合传动,及霍尔传感器或光感感应装置位置信息感知,既能保证分合闸操作位置的确定性与一致性,又能确保断路器位置精度识别的可靠性,可以彻底解决传统断路器电动操作机构分、合闸虚位的问题。
手柄与回转板紧密连接,二者形成整体组合件,固定更牢靠,定位更精准,为高精度传动提供保障;动作响应快,响应时间最快可至1.2s。
在本实施例中,所述电动操作机构本体为第一电动操作机构1-1和第二电动操作机构1-2,第一电动操作机构1-1包括第一手柄2-1、第一回转板3-1、第一断路器用机械连杆机构4-1和第一断路器用触头盒5-1。
如图2所示,按照本发明的基于齿轮齿条啮合的断路器用微型电动操作机构的图1所示优选实施例中手柄的结构示意图。
在本实施例中,当齿条位于所述手柄的顶部时,所述齿条选用第一齿条6,第一齿条6与第一手柄2-1、第一回转板3-1形成组合件,该组合件上设有霍尔感应单元7,可以准确感知断路器动作的位置。
如图3所示,按照本发明的基于齿轮齿条啮合的断路器用微型电动操作机构的图2所示优选实施例中霍尔感应单元的安装示意图。
在本实施例中,所述第一电动操作机构1-1的电路板上设有霍尔接收单元11;第二电动操作机构1-2的电路板上设有光感接收单元12(如图4所示)。
霍尔感应单元7与霍尔接收单元11为非接触式感知结构形式的配合,能精准获取位置信息。
在本实施例中,所述第一电动操作机构1-1中还包括第一电机13-1和第一齿轮14-1(见图5所示)。
本发明的电动操作机构的工作过程为:第一电动操作机构1-1上面的电机13-1先通过齿轮组将动力传递到齿轮14-1,然后齿轮14-1与手柄2-1上的齿条特征形成啮合,带动手柄2-1往返摆动。
在本实施例中,所述齿轮与齿条的配合方式为上下布置,当所述齿轮在上时,所述齿条在下。
在本实施例中,所述齿轮的直径为13-18毫米;齿条边长为49-56毫米。
在本实施例中,所述第一电动操作机构1-1的尺寸为70毫米×80毫米×56毫米,其与断路器用机械连杆机构、手柄、回转板组合后的整体尺寸为70毫米×80毫米×74毫米。
当第一电动操作机构1-1的回转板3-1上的霍尔感应单元7运动到电动操作机构电路板上的霍尔接收单元11相对位置时,产生信号控制电动操作机构的电机停止转动。
实施例二:
现在参考附图,图6-图9描述了本发明的基于齿轮齿条啮合的断路器用微型电动操作机构的结构示意图。一种基于齿轮齿条啮合的断路器用微型电动操作机构,其包括电动操作机构本体,该本体包括断路器用机械连杆机构、手柄、回转板和断路器用触头盒,所述电动操作机构固定在断路器中盖上;所述断路器用机械连杆机构通过一轴固定在断路器用触头盒上;所述电动操作机构通过内部齿轮组传动带动规定在所述回转板上的手柄摆动,通过回转板的摆动带动断路器用机械连杆机构运动,控制断路器用触头盒分/合闸操作,所述手柄的左右两侧安装有与齿轮啮合的齿条,通过齿轮箱内置电机的正、反向旋转,带动与回转板固定在一起的手柄组合件,围绕机械连杆机构侧板上的旋转中心进行左、右往返摆动,实现断路器分合操作;同时电动操作机构内部的电路板上安装有霍尔传感器或光感感应装置,可以准确感知断路器动作的位置。通过齿轮齿条啮合传动,及霍尔传感器或光感感应装置位置信息感知,既能保证分合闸操作位置的确定性与一致性,又能确保断路器位置精度识别的可靠性,可以彻底解决传统断路器电动操作机构分、合闸虚位的问题。
手柄与回转板紧密连接,二者形成整体组合件,固定更牢靠,定位更精准,为高精度传动提供保障;动作响应快,响应时间最快可至1.2s。
本实施例中,所述电动操作机构本体为第二电动操作机构1-2包括第二手柄2-2、第二回转板3-2、第二断路器用机械连杆机构4-2和第二断路器用触头盒5-2。
接下来参阅图7所示,按照本发明的基于齿轮齿条啮合的断路器用微型电动操作机构的图6所示优选实施例中手柄的结构示意图。
在本实施例中,当齿条位于手柄的左右两侧时,所述齿条选用第二齿条8,第二齿条8与第二手柄2-2、第二回转板3-2形成组合件,第二手柄2-2上设有光感感应单元9,可以准确感知断路器动作的位置。
如图8所示,为按照本发明的基于齿轮齿条啮合的断路器用微型电动操作机构的图6所示优选实施例中手柄与回转板组合件的结构示意图。
在本实施例中,所述第二手柄2-2的内壁上设有定位凸台10,通过螺钉将第二回转板3-2与其紧密连接,二者整体构成组合件。
最后参阅图9所示,按照本发明的基于齿轮齿条啮合的断路器用微型电动操作机构的图6所示优选实施例的动作示意图。
在本实施例中,所述第二电动操作机构1-2的电路板上设有光感接收单元12。
光感感应单元9与光感接收单元12为非接触式感知结构形式的配合,能精准获取位置信息。
在本实施例中,所述第二电动操作机构1-2还包括第二电机13-2和第二齿轮14-2。
本发明的电动操作机构的工作过程为:第二电动操作机构1-2上面的电机13-2先通过齿轮组将动力传递到齿轮14-2,然后齿轮14-2与手柄2-2上的齿条特征形成啮合,带动手柄2-2往返摆动。
在本实施例中,所述齿轮与齿条的配合方式为左右,所述齿轮位于中间位置,两段齿条分布在齿轮的左右两侧。
在本实施例中,所述齿轮的直径为13-18毫米;齿条边长为49-56毫米。
在本实施例中,所述第二电动操作机构1-2的尺寸为119毫米×85毫米×53毫米,其与断路器用机械连杆机构、手柄、回转板组合后的整体尺寸为119毫米×85毫米×94毫米。
当第二电动操作机构1-2的手柄2-2表面光感感应单元9运动到电动操作机构电路板上的光感接收单元12时,产生信号控制电动操作机构的电机停止转动。
尽管参考附图详细地公开了本发明,但应理解的是,这些描述仅仅是示例性的,并非用来限制本发明的应用。本发明的保护范围由附加权利要求限定,并可包括在不脱离本发明保护范围和精神的情况下针对本发明所作的各种变型、改型及等效方案。
- 一种基于齿轮齿条啮合的断路器用微型电动操作机构
- 一种基于齿轮齿条啮合的断路器用微型电动操作机构