一种卫星入轨初期放气扰动的评估系统与评估方法
文献发布时间:2023-06-19 09:29:07
技术领域
本发明涉及一种卫星放气扰动的评估系统与评估方法。
背景技术
由于卫星星体及部分设备具有一定的密闭性,导致卫星在入轨初期存在由于星体放气引起的姿态扰动,如处理不及时将危及卫星安全。因此,对卫星入轨初期由于星体放气造成姿态扰动的现象进行判断和处置具有重要意义。
在卫星发射过程中,从点火起飞到星箭分离时间较短,卫星外界气压环境变化快,而卫星外表面由于热控的需要采取了严格的热控包覆措施,具有一定的密闭性,星内气体在短时间内较难完全排出星外;且部分星内设备也具有一定的密闭性,完成在真空环境中的放气是一个缓慢的过程。因此,在卫星入轨初期,存在由于星体放气引起的姿态扰动现象。
卫星在轨工作模式基本均为三轴稳定模式,为完成特定的有效载荷任务功能,需具备特定的姿态指向要求,卫星星体的放气现象必然会引起姿态的扰动,进而可能影响卫星任务功能,如处理不及时甚至可能危及卫星安全。用于卫星姿态控制的执行机构包括反作用轮、喷气推力器、陀螺力矩器等,卫星放气造成的姿态扰动将通过姿态控制系统反映到执行机构的状态变化上,造成反作用轮转速变化、或推力器喷气频繁、或陀螺力矩器角度变化等。目前,针对卫星入轨初期的放气扰动现象及影响,尚无明确的可参考借鉴的评估系统和评估方法;有必要对卫星放气扰动的评估系统和评估方法开展研究,通过执行机构的遥测变化对放气扰动现象进行判断,并建立卫星放气模型,实现对放气扰动力的预估计算、对扰动的大小和影响进行评估,以此为依据开展针对性的在轨处置,避免放气扰动对卫星指向功能及卫星安全造成影响。
发明内容
本发明所要解决的技术问题是:克服现有技术的不足,提出一种卫星入轨初期放气扰动的评估系统与评估方法,通过卫星执行机构的遥测变化对姿态扰动力矩和扰动力进行定量计算和评估,并提出了采用扰动力、飞行时间和放气时长进行放气扰动评估的判据条件,为放气扰动的在轨处置提供依据。
本发明所采用的技术方案是:一种卫星入轨初期放气扰动的评估方法,包括步骤如下:
(1)在卫星入轨初期,对疑似发生星体放气扰动的现象的卫星,通过卫星遥测获取姿态扰动期间执行机构的遥测数据变化量;
对采用喷气推力器进行姿态控制的卫星,对各推力器在姿态扰动期间的喷气累计时间变化情况进行统计,获取各推力器在姿态扰动期间的喷气工作时长[Δt
对采用反作用轮进行姿态控制的卫星,对各反作用轮在姿态扰动期间的转速变化情况进行统计,获取各反作用轮在姿态扰动期间的转速变化量[Δw
(2)通过步骤(1)中获得的执行机构的遥测数据变化量,计算得到姿态扰动期间作用到卫星本体坐标系三轴上的扰动力矩。
当采用喷气推力器控制卫星姿态时,姿态扰动期间作用到卫星本体坐标系三轴上的扰动力矩为:
式中m
采用反作用轮控制卫星姿态时,姿态扰动期间作用到卫星本体坐标系三轴上的扰动力矩为:
式中
卫星本体坐标系的定义为:坐标原点O位于卫星质心;OX轴由坐标原点指向卫星的某一特征轴方向,与卫星机械坐标系X轴平行;OZ轴由坐标原点指向卫星的另一特征轴方向,与OX轴垂直,与卫星机械坐标系Z轴平行;OY轴与OX、OZ轴构成右手系。
反作用轮系的安装矩阵C
X^h
(3)基于卫星构型布局设计和可能的放气位点的机械参数,建立卫星放气力学模型,得到放气扰动过程中,卫星各轴扰动力与扰动力矩的关系。
OXYZ为卫星本体坐标系,P为卫星表面任意可能的放气位点,P在卫星本体坐标系下的坐标为[P
放气对卫星产生的反作用力为:
(4)在计算得到扰动力后,根据卫星飞行时间T,扰动力作用时长ΔT及扰动力F的大小及对姿态扰动现象进行判断。
T
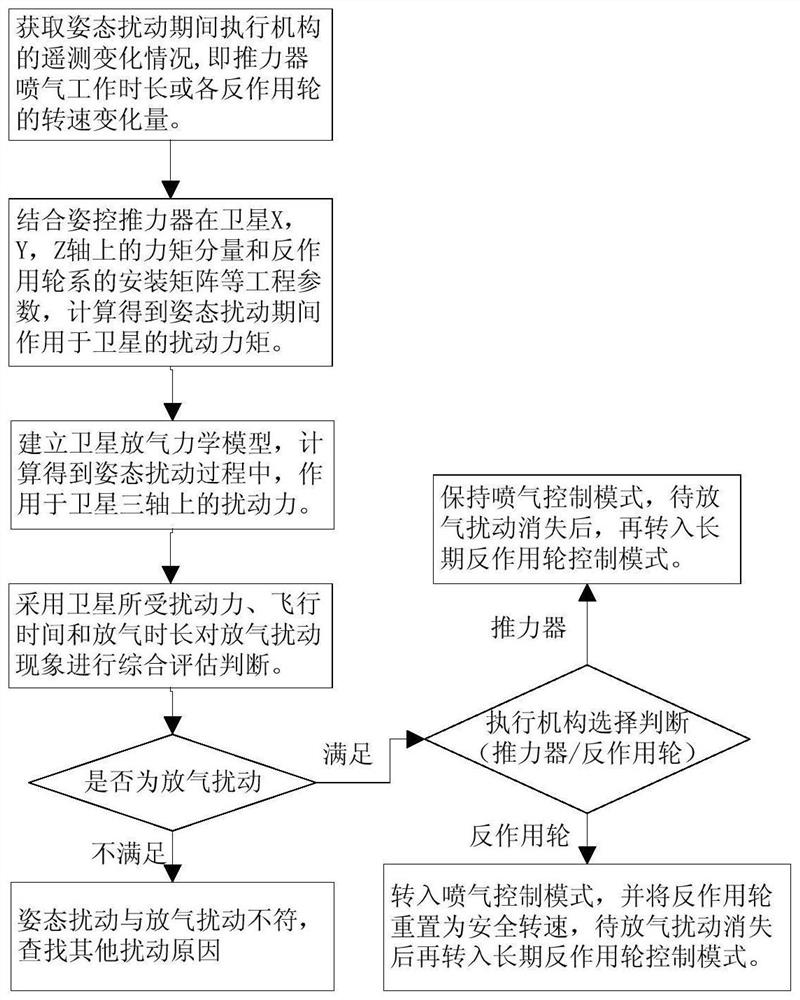
T 且ΔT 且F (5)通过第(4)步的判据条件,对卫星入轨初期的姿态扰动现象进行判断,如满足第(4)步中的判据,则判定姿态扰动现象应为卫星星体放气引起的扰动。在确定姿态扰动现象为放气扰动后,根据卫星姿态控制方式采取对应的处置措施,具体如下: a)如放气扰动发生时卫星采用喷气推力器进行姿态控制,则应采取保持喷气控制模式的措施,使用推力器喷气来抵消放气扰动力矩的影响,待放气扰动现象消失后,再将卫星转入长期的反作用轮控制模式; b)如放气扰动发生时卫星采用反作用轮进行姿态控制,则将卫星转入喷气控制模式,并将反作用轮重置为设定的安全转速,待放气扰动现象消失后,再将卫星转入长期的反作用轮控制模式。 根据上述评估方法构建的卫星入轨初期放气扰动的评估系统,包括: 第一模块,用于在卫星入轨初期,对疑似发生星体放气扰动的现象的卫星,通过卫星遥测获取姿态扰动期间执行机构的遥测数据变化量,并计算得到姿态扰动期间作用到卫星本体坐标系三轴上的扰动力矩; 第二模块,基于卫星构型布局设计和可能的放气位点的机械参数,建立卫星放气力学模型,得到放气扰动过程中,卫星各轴扰动力与扰动力矩的关系; 第三模块,根据卫星飞行时间T、扰动力作用时长ΔT、扰动力F的大小及姿态扰动现象,得到姿态扰动现象为卫星放气扰动的判据条件;通过判据条件,可对卫星入轨初期的姿态扰动现象进行判断,如满足步骤判据条件,则判定姿态扰动现象为卫星星体放气引起的扰动。 本发明与现有技术相比的有益效果是: (1)本发明在以往尚无明确的可参考借鉴的方法基础上,提供了一种卫星入轨初期放气扰动现象的评估系统与评估方法,通过卫星执行机构的遥测变化对姿态扰动力矩进行定量计算和评估; (2)本发明建立了一种卫星放气分析模型,通过卫星构型布局和可能的放气位点的机械参数,给出了扰动过程中卫星所受扰动力与扰动力矩的计算关系式; (3)本发明提出了对放气扰动现象采用扰动力、飞行时间和放气时长进行评估的判据条件,并对符合放气扰动现象的情况,给出了对应的在轨处置方法。 附图说明 图1是卫星放气扰动力学分析模型。 图2是是本发明方法的具体实施流程图。 具体实施方式 下面结合实施例对本发明作进一步阐述。 本发明提供了一种卫星入轨初期放气扰动的评估系统与评估方法,主要包括:获取姿态扰动期间卫星执行机构的遥测变化情况;结合姿控系统工程参数对姿态扰动力矩进行计算;建立卫星放气模型,根据姿态扰动力矩对姿态扰动力进行估算;采用扰动力、飞行时间和放气时长的判据条件对姿态扰动现象进行综合评估判断;根据姿态控制方式对放气扰动给出了对应的在轨处置方法。 如图2所示,一种卫星入轨初期放气扰动的评估方法的具体实现过程步骤如下: 1)卫星入轨初期,对疑似发生星体放气扰动的现象,通过卫星遥测获取姿态扰动期间执行机构的遥测变化情况。 对采用喷气推力器进行姿态控制的卫星,对各推力器在姿态扰动期间的喷气累计时间变化情况进行统计,设卫星配置了n个姿控推力器,获取各推力器在姿态扰动期间的喷气工作时长[Δt 对采用反作用轮进行姿态控制的卫星,对各反作用轮在姿态扰动期间的转速变化情况进行统计,设卫星配置了m个反作用轮,获取各反作用轮在姿态扰动期间的转速变化量[Δw 2)通过上述执行机构的遥测变化量及工程参数,计算得到姿态扰动期间,作用到卫星本体坐标系三轴上的扰动力矩。 采用喷气控制时,卫星三轴上的扰动力矩为:
式中m
式中 卫星本体坐标系的定义为:坐标原点O位于卫星质心;OX轴由坐标原点指向卫星的某一特征轴方向,与卫星机械坐标系X轴平行;OZ轴由坐标原点指向卫星的另一特征轴方向,与OX轴垂直,与卫星机械坐标系Z轴平行;OY轴与OX、OZ轴构成右手系。 反作用轮系的安装矩阵C
X^h 3)基于卫星构型布局设计和可能的放气位点的机械参数,建立卫星放气力学模型(见图1),得到放气扰动过程中,卫星各轴扰动力与扰动力矩的关系。 图1中,设OXYZ为卫星本体坐标系,P为星表任意可能的放气位点,P在卫星本体坐标系下的坐标为[P
放气对卫星产生的反作用力为:
4)在计算得到扰动力后,根据卫星飞行时间T,扰动力作用时长ΔT及扰动力F的大小及对姿态扰动现象进行综合判断。卫星放气扰动现象一般发生在卫星入轨初期,飞行时间较短,且放气时长较长,放气扰动力较小。设T
5)通过第4)步的判据条件,可对卫星入轨初期的姿态扰动现象进行判断,如满足条件,则姿态扰动现象应为卫星星体放气引起的扰动。在确定姿态扰动现象为放气扰动后,根据卫星姿态控制方式采取对应的处置措施,避免放气扰动对卫星指向功能及卫星安全造成影响。 具体如下: a)如放气扰动发生时卫星采用喷气进行姿态控制,则应采取保持喷气控制模式的措施,使用推力器喷气来抵消放气扰动力矩的影响,待放气扰动现象消失后,再将卫星转入长期的反作用轮控制模式; b)如放气扰动发生时卫星采用反作用轮进行姿态控制,则应择机将卫星转入喷气控制模式,并将反作用轮重置为安全转速,待放气扰动现象消失后,再将卫星转入长期的反作用轮控制模式。 根据上述卫星入轨初期放气扰动的评估方法构建的卫星入轨初期放气扰动的评估系统,包括: 第一模块,用于在卫星入轨初期,对疑似发生星体放气扰动的现象的卫星,通过卫星遥测获取姿态扰动期间执行机构的遥测数据变化量,并计算得到姿态扰动期间作用到卫星本体坐标系三轴上的扰动力矩; 第二模块,基于卫星构型布局设计和可能的放气位点的机械参数,建立卫星放气力学模型,得到放气扰动过程中,卫星各轴扰动力与扰动力矩的关系; 第三模块,根据卫星飞行时间T、扰动力作用时长ΔT、扰动力F的大小及姿态扰动现象,得到姿态扰动现象为卫星放气扰动的判据条件;通过判据条件,可对卫星入轨初期的姿态扰动现象进行判断,如满足步骤判据条件,则判定姿态扰动现象为卫星星体放气引起的扰动。 实施例: 1)以某卫星入轨初期的某次姿态扰动现象为例,该卫星配置了4个反作用轮,姿态扰动期间采用反作用轮进行姿态控制。通过卫星遥测获取姿态扰动时长为ΔT=9913s期间,各反作用轮的转速变化量为[Δw 2)根据工程参数,各反作用轮标称角动量
因此,计算得到姿态扰动期间作用到卫星三轴上的扰动力矩为:
3)按照该卫星的构型布局设计和总装实施情况,星表最可能发生放气的位置包括推力器安装处的管路引出点、部分星表电缆出舱口等,放气等效扰动力可能的作用位点P在质心坐标系下的坐标约为[P
放气对卫星产生的反作用力为:
4)根据多颗卫星飞行数据,卫星发生姿态扰动的时间段为从星箭分离时刻(T0)到约T0+5h期间,后姿态扰动量级逐级减小至无影响,考虑星箭分离前飞行时间3.5h及一定裕度,可能发生放气现象的最大飞行时间约为T T 且ΔT 且F 因此,该卫星出现的姿态扰动现象为卫星星体放气产生的姿态扰动。 5)经评估判断,该卫星入轨初期的姿态扰动现象为星体放气引起的扰动,放气扰动发生时卫星采用反作用轮进行姿态控制,则应采取处置措施如下:择机将卫星转入喷气控制模式,使用推力器喷气来抵消放气扰动力矩的影响,并将反作用轮重置为安全转速,待放气扰动现象消失后,再将卫星转入长期的反作用轮控制模式。 本发明虽然已以较佳实施例公开如上,但其并不是用来限定本发明,任何本领域技术人员在不脱离本发明的精神和范围内,都可以利用上述揭示的方法和技术内容对本发明技术方案做出可能的变动和修改,因此,凡是未脱离本发明技术方案的内容,依据本发明的技术实质对以上实施例所作的任何简单修改、等同变化及修饰,均属于本发明技术方案的保护范围。
- 一种卫星入轨初期放气扰动的评估系统与评估方法
- 一种卫星入轨初期放气扰动的评估系统与评估方法