一种用于清洁海上光伏板的无人机
文献发布时间:2023-06-19 09:30:39
技术领域
本发明涉及光伏板相关领域,具体为一种用于清洁海上光伏板的无人机。
背景技术
众所周知,光伏发电是利用半导体界面的光生伏特效应而将光能直接转变为电能的一种技术,光伏发电板的布设场地从楼房屋顶到戈壁荒漠,再到茫茫海上均已成为现实,但光伏板使用一段时间后表面沉积的灰尘或污垢会显著影响发电效能,需要及时清洁保养,但面对海上成片的太阳能光伏板,人踩在上面手动清洁既危险又低效,因此需要设计一种用于清洁海上光伏板的无人机来解决上述问题。
发明内容
本发明的目的在于提供一种用于清洁海上光伏板的无人机,用于克服现有技术中的上述缺陷。
本发明是通过以下技术方案来实现的。本发明的一种用于清洁海上光伏板的无人机,包括机体,所述机体内包括控制腔;
所述控制腔内设有海水利用机构,所述机体下侧设有清洁机构,所诉控制腔上下端之间转动设有左右对称的丝杆,右侧所述丝杆上固定设有第三锥齿轮,两根所述丝杆下侧分别固定设有左右对称的第一齿轮,左侧所述第一齿轮能够与右侧所述第一齿轮啮合,两根所述丝杆上滑动设有螺母,所述第一弹簧前端转动设有第一铰接轴,所述第一铰接轴前端固定设有第二连杆,所述第二连杆下端固定设有清洁刷,所述第二连杆上固定设有第三连杆,所述控制腔后端固定设有伸缩电机,所述伸缩电机左右端之间转动设有伸缩电机轴,所述伸缩电机轴左端固定设有第六锥齿轮,所述第二水管右端固定设有第三齿轮,所述伸缩电机上端固定设有液压杆,所述液压杆能够带动所述伸缩电机轴左右移动,所述控制腔后端固定块上下端之间转动设有蜗杆,所述蜗杆下端固定设有第五锥齿轮,所述控制腔后端另一块固定块左右端之间转动设有第三转动轴,所述第三转动轴从左到右依次固定设有第四锥齿轮、蜗轮,所述第五锥齿轮能够与所述第六锥齿轮啮合,所述蜗轮能够与所述蜗杆啮合,所述第四锥齿轮能够与所述第四锥齿轮啮合;
所述控制腔后端固定设有左右对称的第一固定块,所述第一固定块内设有第二滑槽,所述第二滑槽内滑动设有第二滑块,所述第二滑块前端从上到下依次固定设有第二固定块、第一滑块,所述机体左右端固定设有左右对称的支架,所述控制腔左右端固定设有左右对称的第二铰接轴,所述第二铰接轴上铰接设有第一连杆,所述第一连杆上设有第一滑槽,所述第一滑块能够在所述第一滑槽内滑动,所述支架内设有做风扇,所述做风扇内滑动设有第一锥齿轮,所述第一锥齿轮上端固定设有第三铰接轴,所述第一锥齿轮下端铰接设有水箱,所述第一锥齿轮与所述做风扇之间连接设有第一转动轴,所述第三铰接轴上铰接设有第四连杆,所述第一连杆内设有第三滑槽,所述第四连杆一端能够在所述第三滑槽内滑动,所述第三滑槽与所述第三滑槽之间连接设有第一弹簧。
可优选的,所述机体上端固定设有光伏板,所述机体外侧固定设有飞行机构,所述控制腔左端转动设有第一转动轴,所述第一转动轴从左到右依次固定设有做风扇、第一锥齿轮,所述控制腔上端从左到右依次转动设有第二转动轴、第四转动轴,所述第二转动轴从上到下依次固定设有第一皮带轮、第二锥齿轮,所述第二锥齿轮能够与所述第一锥齿轮啮合,所述第四转动轴从上到下依次固定设有第二皮带轮、第七锥齿轮,所述第一皮带轮与所述第二皮带轮之间连接设有第一皮带,所述控制腔右端转动设有第五转动轴,所述第五转动轴从左到右依次固定设有第二齿轮、第八锥齿轮、右扇叶,所述第七锥齿轮能够与所述第八锥齿轮啮合,所述第二齿轮能够与所述第三齿轮啮合。
可优选的,所述控制腔后端固定设有左右对称的两个水箱,所述控制腔后端固定设有左右对称的两个水泵,所述水箱内部固定设有渗透膜,所述渗透膜上侧设有海水腔,所述渗透膜下侧设有淡水腔,所述水箱上端固定设有换气阀,所述水泵上端固定设有穿过所述渗透膜的第三水管,所述控制腔下端固定设有左右对称的两个出水头,所述淡水腔与所述出水头之间连接设有第一水管,所述水泵下端固定设有第二水管。
本发明的有益效果 :本发明结构简单,操作简便,利用无人机自动清洁维护假设于海上的太阳能光伏板,本发明可以利用海水淡化成淡水作为清洁用水,有效避免了无人机需要在岸边和海上多次往返运输的麻烦,无人机会自适应光伏板的倾斜角度,可以适配大部分可转变倾角的光伏板,也可以用于清洁楼顶的光伏板等人不便于到达的位置的光伏板。
附图说明
为了更清楚地说明发明实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
下面结合附图和实施例对本发明进一步说明。
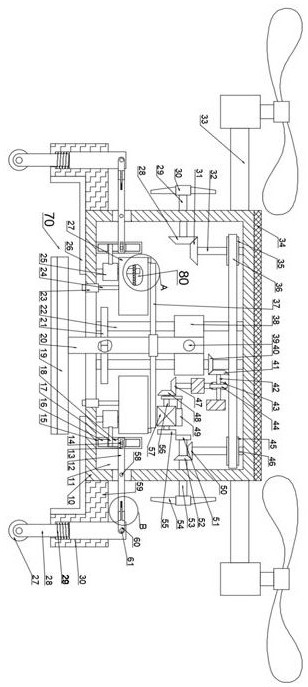
图1是本发明实施例的结构示意图;
图2是图1中A的结构放大示意图;
图3是图1中B的结构放大示意图。
具体实施方式
下面结合图1-3对本发明进行详细说明,其中,为叙述方便,现对下文所说的方位规定如下:下文所说的上下左右前后方向与图1本身投影关系的上下左右前后方向一致。
结合附图1-3所述的一种用于清洁海上光伏板的无人机,包括机体10,所述机体10内包括控制腔11,所述控制腔11内设有海水利用机构80,所述机体10下侧设有清洁机构70,所诉控制腔11上下端之间转动设有左右对称的丝杆22,右侧所述丝杆22上固定设有第三锥齿轮40,两根所述丝杆22下侧分别固定设有左右对称的第一齿轮21,左侧所述第一齿轮21能够与右侧所述第一齿轮21啮合,两根所述丝杆22上滑动设有螺母38,所述第一弹簧68前端转动设有第一铰接轴39,所述第一铰接轴39前端固定设有第二连杆20,所述第二连杆20下端固定设有清洁刷19,所述第二连杆20上固定设有第三连杆37,所述控制腔11后端固定设有伸缩电机57,所述伸缩电机57左右端之间转动设有伸缩电机轴56,所述伸缩电机轴56左端固定设有第六锥齿轮48,所述第二水管26右端固定设有第三齿轮55,所述伸缩电机57上端固定设有液压杆49,所述液压杆49能够带动所述伸缩电机轴56左右移动,所述控制腔11后端固定块上下端之间转动设有蜗杆43,所述蜗杆43下端固定设有第五锥齿轮47,所述控制腔11后端另一块固定块左右端之间转动设有第三转动轴42,所述第三转动轴42从左到右依次固定设有第四锥齿轮41、蜗轮44,所述第五锥齿轮47能够与所述第六锥齿轮48啮合,所述蜗轮44能够与所述蜗杆43啮合,所述第四锥齿轮41能够与所述第四锥齿轮41啮合;
所述控制腔11后端固定设有左右对称的第一固定块15,所述第一固定块15内设有第二滑槽16,所述第二滑槽16内滑动设有第二滑块18,所述第二滑块18前端从上到下依次固定设有第二固定块17、第一滑块14,所述机体10左右端固定设有左右对称的支架59,所述控制腔11左右端固定设有左右对称的第二铰接轴58,所述第二铰接轴58上铰接设有第一连杆12,所述第一连杆12上设有第一滑槽13,所述第一滑块14能够在所述第一滑槽13内滑动,所述支架59内设有做风扇30,所述做风扇30内滑动设有第一锥齿轮28,所述第一锥齿轮28上端固定设有第三铰接轴61,所述第一锥齿轮28下端铰接设有水箱27,所述第一锥齿轮28与所述做风扇30之间连接设有第一转动轴29,所述第三铰接轴61上铰接设有第四连杆60,所述第一连杆12内设有第三滑槽67,所述第四连杆60一端能够在所述第三滑槽67内滑动,所述第三滑槽67与所述第三滑槽67之间连接设有第一弹簧68。
有益地,所述机体10上端固定设有光伏板34,所述机体10外侧固定设有飞行机构33,所述控制腔11左端转动设有第一转动轴29,所述第一转动轴29从左到右依次固定设有做风扇30、第一锥齿轮28,所述控制腔11上端从左到右依次转动设有第二转动轴32、第四转动轴46,所述第二转动轴32从上到下依次固定设有第一皮带轮35、第二锥齿轮31,所述第二锥齿轮31能够与所述第一锥齿轮28啮合,所述第四转动轴46从上到下依次固定设有第二皮带轮45、第七锥齿轮50,所述第一皮带轮35与所述第二皮带轮45之间连接设有第一皮带36,所述控制腔11右端转动设有第五转动轴53,所述第五转动轴53从左到右依次固定设有第二齿轮51、第八锥齿轮52、右扇叶54,所述第七锥齿轮50能够与所述第八锥齿轮52啮合,所述第二齿轮51能够与所述第三齿轮55啮合。
有益地,所述控制腔11后端固定设有左右对称的两个水箱27,所述控制腔11后端固定设有左右对称的两个水泵25,所述水箱27内部固定设有渗透膜62,所述渗透膜62上侧设有海水腔65,所述渗透膜62下侧设有淡水腔64,所述水箱27上端固定设有换气阀66,所述水泵25上端固定设有穿过所述渗透膜62的第三水管63,所述控制腔11下端固定设有左右对称的两个出水头23,所述淡水腔64与所述出水头23之间连接设有第一水管24,所述水泵25下端固定设有第二水管26。
以下结合图1至图3对本文中的的使用步骤进行详细说明:
初始状态,第五锥齿轮47与第六锥齿轮48啮合,第二齿轮51与第三齿轮55分离。
无人机悬停在海面上,第二水管26下端浸入海水中,水泵25启动通过第二水管26、第三水管63将海水吸入海水腔65中,然后飞到海上光伏板上方,海水腔65中的海水经过渗透膜62淡化后变成淡水浸入淡水腔64中,淡水腔64中的淡水在无人机移动过程中经过第一水管24、出水头23滴落到清洁刷19上。
无人机慢慢水平下降,直至两侧所述水箱27都与光伏板充分接触,无人机下降的过程中,光伏板压动水箱27向上移动,水箱27向上移动带动第一锥齿轮28向上移动,第一锥齿轮28向上移动带动第四连杆60向上移动,第四连杆60向上移动带动第四连杆60转动,第四连杆60转动带动第一连杆12转动,第一连杆12转动带动第一滑块14向下移动,第一滑块14向下移动带动第二滑块18向下移动,第二滑块18向下移动带动第二固定块17向下移动,因为光伏板均有一定倾斜角,两侧的所述第二固定块17下降距离不一样;
伸缩电机57启动带动伸缩电机轴56转动,伸缩电机轴56转动带动第六锥齿轮48转动,第六锥齿轮48转动带动第五锥齿轮47转动,第五锥齿轮47转动带动蜗杆43转动,蜗杆43转动带动蜗轮44转动,蜗轮44转动带动第三转动轴42转动,第三转动轴42转动带动第四锥齿轮41转动,第四锥齿轮41转动带动第三锥齿轮40转动,第三锥齿轮40转动带动右侧丝杆22转动,右侧丝杆22转动带动右侧第一齿轮21转动,右侧第一齿轮21转动带动左侧第一齿轮21转动,左侧第一齿轮21转动带动左侧丝杆22转动,两根丝杆22转动带动螺母38向下移动,螺母38向下移动带动第一铰接轴39向下移动,第一铰接轴39向下移动带动第二连杆20向下移动,第二连杆20向下移动带动清洁刷19、第三连杆37向下移动,第三连杆37向下移动分别与两侧第二固定块17接触,由于两侧第二固定块17高度不一样,两侧第二固定块17的连线实际上等于光伏板表面倾斜度,第三连杆37带动第二连杆20转动一定角度,第二连杆20转动带动清洁刷19转动,此时清洁刷19下表面与光伏板表面水平接触。
液压杆49缩短带动伸缩电机轴56向右移动,伸缩电机轴56向右移动使得第三齿轮55与第二齿轮51啮合,此时伸缩电机57带动伸缩电机轴56转动,伸缩电机轴56转动带动第三齿轮55转动,第三齿轮55转动带动第二齿轮51转动,第二齿轮51转动带动第五转动轴53转动,第五转动轴53转动带动第八锥齿轮52、右扇叶54转动,第八锥齿轮52转动带动第四转动轴46转动,第四转动轴46转动带动第二皮带轮45转动,第二皮带轮45转动带动第一皮带36转动,第一皮带36转动带动第一皮带轮35转动,第一皮带轮35转动带动第二转动轴32转动,第二转动轴32转动带动第二锥齿轮31转动,第二锥齿轮31转动带动第一锥齿轮28转动,第一锥齿轮28转动带动第一转动轴29转动,第一转动轴29转动带动做风扇30转动,做风扇30与第五转动轴53转动通过电机正反转控制无人机在光伏板表面左右移动,第一锥齿轮28控制无人机高度保持清洁刷19下表面与光伏板的贴合状态,无人机移动带动清洁刷19左右移动擦拭光伏板表面,待清洁完成后,无人机拉起,利用所述飞行机构33带来的风迅速吹干光伏板表面上残留的水。
本发明的有益效果 :本发明结构简单,操作简便,利用无人机自动清洁维护假设于海上的太阳能光伏板,本发明可以利用海水淡化成淡水作为清洁用水,有效避免了无人机需要在岸边和海上多次往返运输的麻烦,无人机会自适应光伏板的倾斜角度,可以适配大部分可转变倾角的光伏板,也可以用于清洁楼顶的光伏板等人不便于到达的位置的光伏板。
上述实施例只为说明本发明的技术构思及特点,其目的在于让熟悉此领域技术的人士能够了解本发明内容并加以实施,并不能以此限制本发明的保护范围。凡根据本发明精神实质所作的等效变化或修饰,都应涵盖在本发明的保护范围内。