用于内窥镜的传动结构、内窥镜、传动方法及传动系统
文献发布时间:2023-06-19 09:41:38
技术领域
本发明涉及内窥镜领域,更具体地,涉及一种用于内窥镜的传动结构,内窥镜及一种用于内窥镜精确控制弯曲部的传动方法。
背景技术
内窥镜是结合了传统光学,现代电子学,以及机械结构软件控制等领域的一种综合器械,用于深入孔道,探查孔道内部环境。尤其适用于作为医疗器械对人体进行检测,以及其他工程工业上需要探查孔道内部环境的使用场景。
考虑到内窥镜的工作端深入孔道,对其进行控制存在一定的难度,通常采用牵引组件通过内窥镜设置在孔道外端或孔道外侧的控制端通过控制牵引组件进行控制,或是完全利用内窥镜管路的柔性进行位置的控制调整。
在一种对内窥镜的控制方案中,通过设置钢丝绳一端与内窥镜工作端连接,另一端与内窥镜的控制端连接,通过轮盘收紧或者放松钢筋,达到控制内窥镜弯折的效果,通过该方案控制内窥镜弯折,内窥镜的弯折部分形状不可控,容易因为单侧的钢筋拉伸造成内窥镜在弯折过程当中弯折部出现异形部分,无法按照预期调整内窥镜端部朝向,需要提供一种能够精确控制弯折形状的内窥镜。
发明内容
本发明实施例所要解决的技术问题是提供一种用于内窥镜的传动结构,能够精确控制弯折形状。
为了解决上述技术问题,本发明实施例提供一种用于内窥镜的传动结构,采用了如下所述的技术方案:
一种用于内窥镜的传动结构,包括牵引组件、固定件和蛇骨,所述牵引组件的前端在若干连接位上与所述蛇骨固定连接,所述牵引组件与蛇骨的连接位相对,并且相互配合驱动蛇骨改变弯曲度;所述固定件设置在牵引组件的后端,并且在预设位置上锁定所述牵引组件。
进一步的,所述环体包括第一环体及第二环体,两组相邻的所述第一环体依次通过第一方向和第二方向上的铆钉转动连接,所述第一方向和第二方向相交设置,所述蛇骨还包括第二环体和铆钉,所述第二环体和第一环体通过铆钉固定。
进一步的,牵引组件包括钢丝和齿条,所述钢丝设置在齿条的前端,并且在若干连接位上与所述蛇骨固定连接,固定件在两组齿条相对的齿位上锁定所述齿条。
为了解决上述技术问题,本发明实施例还提供一种内窥镜,采用了如下所述的技术方案:
一种内窥镜,包括上述的用于内窥镜的传动结构,还包括镜头,所述镜头设置在所述蛇骨的前端。
为了解决上述技术问题,本发明实施例还提供一种传动方法,采用了如下所述的技术方案:
一种传动方法,用于上述的用于内窥镜的传动结构,包括以下步骤:
确定对内窥镜进行调整的内窥镜的转动角度;
根据内窥镜转动角度确定相邻两环体的转动角度及环体的转动组数;
根据相邻两环体的转动角度及转动环体的组数确定钢丝的移动距离;
移动牵引组件调整蛇骨转动至转动角度并锁定。
进一步的,根据相邻两环体的转动角度及转动环体的组数确定钢丝的移动距离的步骤还包括:相邻两环体为一组,根据相邻两环体的转动角度为,每组环体转动对应的钢丝的移动距离,钢丝的移动距离为每组环体对应的钢丝的移动距离相加求和。
进一步的,根据相邻两环体的转动角度及转动环体的组数确定钢丝的移动距离的步骤,包括:
根据两组第一环体之间或第一环体和第二环体之间的转动角度确定钢丝拉动每个连接位产生移动的移动距离;
根据钢丝拉动每个连接位产生的移动距离,和转动的第一环体和第二环体的组数,确定钢丝的整体移动距离。
进一步的,根据两组第一环体之间或第一环体和第二环体之间的转动角度确定钢丝拉动每个连接位产生移动的移动距离,具体包括:连接位与相对的连接位之间的距离为第一环体转动的半径R,每组第一环体之间的转动角度为α,钢丝的移动距离S通过以下公式确定:S=R×tanα。
进一步的,根据钢丝拉动每个连接位产生的移动距离,和转动的第一环体和第二环体的组数,确定钢丝的整体移动距离;
具体包括:通过第一环体和第二环体的组数n,及每组钢丝相对于连接点的移动距离S,确定钢丝的整体移动距离为L=S*n。
为了解决上述技术问题,本发明实施例还提供一种传动系统,采用了如下所述的技术方案:
一种传动系统,包括采集模块、控制器及驱动装置,所述采集模块用于采集病体的腔道路径及内窥镜的行进位置;
所述控制器用于确定对内窥镜进行调整的内窥镜的转动角度,确定相邻两环体的转动角度及环体的转动组数,并确定钢丝的移动距离;
所述驱动装置用于驱动钢丝移动;
所述采集模块与所述控制器电信号连接,所述控制器与所述驱动装置电信号连接。
与现有技术相比,本发明实施例主要有以下有益效果:
通过设置两组牵引组件分别相对的与蛇骨在多个位置上固定,在拉动牵引组件的状态下,蛇骨能够平滑的转动,并且转动过程当中通过两组牵引组件在相对的各个连接位上的牵引蛇骨并限定牵引组件的弯折形状,使得弯折过程当中防止牵引组件出现异形部分,精确地调整配套内窥镜的转动角度,并且通过固定件锁定两组调节件,能够防止在使用过程当中,内窥镜的转动角度出现变动。
附图说明
为了更清楚地说明本发明的方案,下面将对实施例描述中所需要使用的附图作一个简单介绍,显而易见地,下面描述中的附图是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
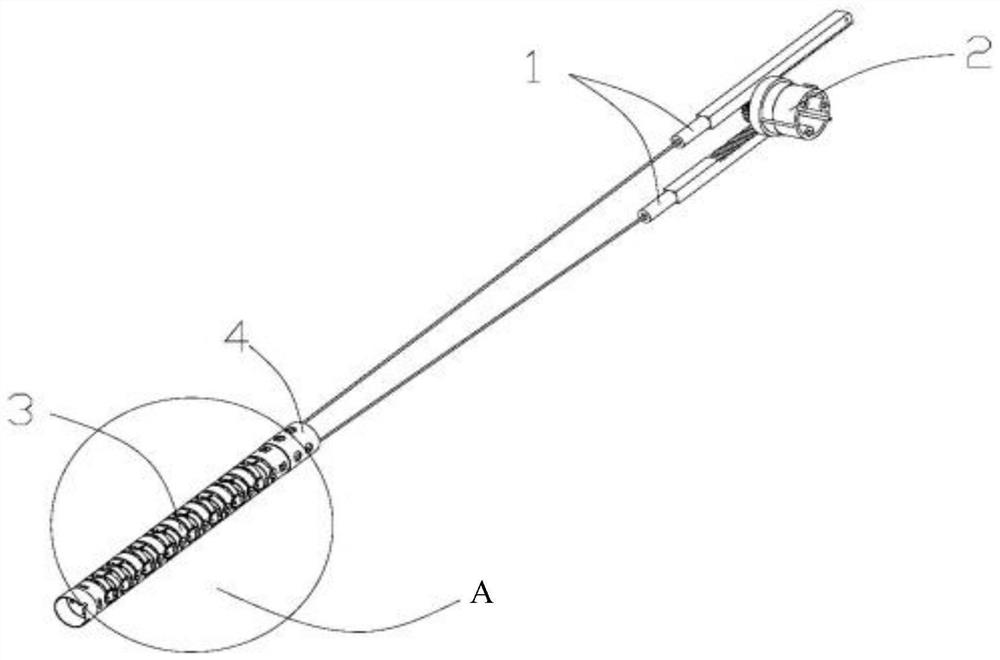
图1为本发明一种用于内窥镜的传动结构的示意图;
图2为本发明一种用于内窥镜的传动结构的侧视图;
图3为本发明一种用于内窥镜的传动结构与图2视角垂直的侧视图;
图4为图1的A部放大图;
图5为本发明S的求解示意图;
图6为本发明一种传动方法流程图;
图7为步骤S300的流程图;
图8为本发明一种传动系统的模块示意图。
附图标记:
1——牵引组件、2——固定件、3——蛇骨、31——第一环体、311——凹位、312——凸起、32——第二环体、321——凹陷、33——铆钉、4——尾环;5——传动系统、51——采集模块、52——控制器、53——驱动装置。
具体实施方式
除非另有定义,本文所使用的所有的技术和科学术语与属于本发明技术领域的技术人员通常理解的含义相同;本文中在申请的说明书中所使用的术语只是为了描述具体的实施例的目的,不是旨在于限制本发明;本发明的说明书和权利要求书及上述附图说明中的术语“包括”和“具有”以及它们的任何变形,意图在于覆盖不排他的包含。本发明的说明书和权利要求书或上述附图中的术语“第一”、“第二”等是用于区别不同对象,而不是用于描述特定顺序。
在本文中提及“实施例”意味着,结合实施例描述的特定特征、结构或特性可以包含在本发明的至少一个实施例中。在说明书中的各个位置出现该短语并不一定均是指相同的实施例,也不是与其它实施例互斥的独立的或备选的实施例。本领域技术人员显式地和隐式地理解的是,本文所描述的实施例可以与其它实施例相结合。
为了使本技术领域的人员更好地理解本发明方案,下面将结合附图,对本发明实施例中的技术方案进行清楚、完整地描述。
本发明一种用于内窥镜的传动结构的实施例一:
请参阅图1,一种用于内窥镜的传动结构,包括两组牵引组件1、固定件2和蛇骨3。
牵引组件1设有两组,牵引组件1的前端在若干连接位上与蛇骨3固定连接,两组牵引组件1与蛇骨3的连接位相对,两组牵引组件1分别设置在蛇骨3的两侧,并且在调节件的内侧与调节件固定连接,在牵引组件1牵引蛇骨3产生形变的过程当中,两组牵引组件1在蛇骨3中分别在两个相对的位置上限定蛇骨3的偏转角度和形变,相互配合驱动蛇骨3改变弯曲度;固定件2设置在牵引组件1的后端,并且在预设位置上锁定两组牵引组件1。
通过拉动一组牵引组件1,控制两组牵引组件1之间产生相对位移,相互对应的连接位在牵引组件1的带动下产生相互之间的偏移,蛇骨3在整体上产生转折,并且在相对的两组牵引组件1的同时牵引之下,互相对应的连接位偏移距离方向固定,蛇骨3整体的转动平稳,能够防止转动过程当中出现异形部分。
进一步的,蛇骨3包括若干可转动连接的环体,多个所述环体之间的转动角度组成所述蛇骨的弯曲度。请参阅图4,其中,环体可以包括若干第一环体31,第一环体31的前端面设有凸起312,第一环体31的后端面设有凹位311;凸起312的端面设置为弧面,并与凹位311的形状相适应;凸起312和凹位311在第一环体31的直径方向上垂直设置,若干第一环体31通过凸起312和凹位311依次连接。
两组第一环体31通过凸起312和凹位311转动连接,在牵引组件1的驱动下,在与两组牵引组件1水平的平面中能够产生相互的转动,或者在与两组牵引组件1垂直的方向上,产生相互的摆动。连续三组第一环体31通过相互垂直的两组凸起312和凹位311依次连接,当牵引组件1驱动调整组件转动的状态下,三组第一环体31分别通过转动和摆动的方式调整调整组件的转动角度,该方案有利于保证调整组件周向上的连接强度,加强调整组件在转动精度上的控制。
请参阅图4,进一步的,蛇骨3还包括第二环体32和铆钉33,铆钉33设置在第二环体32的前端,第二环体32的后端面开设有与凸起312相适应的凹陷321,凹陷321设置在铆钉33的轴线方向上,第二环体32设置在两组第一环体31之间,并且分别通过凹陷321和凸起312,铆钉33和凹位311与第一环体31连接。
第二环体32通过铆钉33与第一环体31连接,相互之间不产生转动,牵引组件1在铆钉33上与调整组件固定连接,贴合调整组件,在调整组件转动的过程当中,保证牵引组件1对调整组件转动方向和转动角度的限制。该方案有利于增强调整组件的强度,并且增强牵引组件1对调整组件角度转动的限制,有效防止调整组件在调整过程当中出现异形部分。
进一步的,内窥镜的传动结构还包括尾环4,尾环4设置在蛇骨3的后端,两组牵引组件1贯穿尾环4,并在尾环4的直径方向上分别于尾环4抵接。尾环4与牵引组件1抵接,在牵引组件1拉动的状态下提供支点。该方案有利于减轻设置在调整组件后端第一圆环上的拉力,蛇骨3的结构更稳定。
请参阅图2及图3,进一步的,牵引组件1包括钢丝和齿条,钢丝设置在齿条的前端,并且在若干连接位上与蛇骨3固定连接,所固定件2在两组齿条相对的齿位上锁定齿条。通过拉动齿条调整两组牵引组件1之间的相对位置,并且通过将两组齿条上相互相对的两组齿位锁定,实现对内窥镜转动角度的精确锁定,防止内窥镜的转动角度出现变化,并且在内窥镜转动角度出现变化的状态下,通过相对的齿位,确定内窥镜角度的变化量,该方案有利于确定锁定内窥镜,并且提能够监控内窥镜的京都变化,
进一步的,固定件2设置为齿轮,齿轮的轮齿分别与两组齿条上的齿位相啮合。两条齿条在相对的方向上与齿轮啮合,通过转动齿轮调整两组齿条的相对位置达到快速精确调整牵引组件1的效果。
为了解决上述技术问题,本发明实施例还提供一种内窥镜,采用了如下的技术方案:
一种内窥镜,包括上述的用于内窥镜的传动结构,还包括镜头,镜头设置在蛇骨3的前端。通过调整内窥镜的调整结构,调整镜头的志向,以适应不同的内窥场景。
本发明一种传动方法的实施例
本发明一种传动方法,方法包括:
请参阅图6,步骤S100:确定对内窥镜进行调整的内窥镜的转动角度。
具体在本实施方式中,还包括,获取患者病体的腔道路径及拍摄图像位置,根据内窥镜的行进位置,得到内窥镜需要调整的内窥镜的转动角度。可以理解,转动角度可以沿顺时针转动0-90度,也可以沿逆时针转动0-90度。
在其他实施方式中,内窥镜的转动角度还可以根据通过操作人员输入,来确定转动角度。
步骤S200:根据内窥镜转动角度确定相邻两环体的转动角度及环体的转动组数。其中,相邻两环体为一组。环体的个数的半数为转动环体的组数。
确定相邻两环体之间的转动角度,即为,确定两第一环体或第一环体与第二环体32之间的转动角度。弯曲部由多组第一环体与第二环体32组成,每组弯曲一定的角度,以达到整体需要弯曲的转动角度。通过内窥镜调整角度确定调组件整体的调整角度,每组第一环体31之间的角度通过牵引组件1的牵引同时控制,每组第一环体31之间的形状以及凸起312和凹位311规格相同的前提下,在每组第一环体与第二环体32之间的转动角度相同。因此,转动角度由第一环体与第二环体32的转动角度与组数的乘积构成,根据计算确定所需要的组数。通过调整组件内窥镜的转动角度可以进行平均分布于多组环体之间,最终能够确定两第一环体31之间或第一环体与第二环体32之间之间的转动角度α。
在其他实施方式中,在内窥镜的设计制造过程中,对于内窥镜的转动角度与对应转动环体的组数之间可以建立对应关系,根据对应关系,可以得到需要转动环体的组数,并得到每组环体需要转动的转动角度α。
步骤S300:根据相邻两环体的转动角度及转动环体的组数确定钢丝的移动距离。
请参阅图5,根据相邻两环体的转动角度为α,每组环体转动对应的钢丝的移动距离S,S=R×tanα,其中,R为环体的转动半径。
钢丝的移动距离可以由每组环体的钢丝的移动距离S相加,最终求和得到钢丝的整体移动距离。
步骤S400:移动牵引组件调整蛇骨转动至转动角度并锁定。
通过钢丝的移动距离和齿轮上轮齿的宽度以及齿轮模数确定齿轮转动的轮齿个数,和齿轮转动的角度。
具体在本实施方式中,通过驱动装置驱动齿轮转动。通过对齿轮转动的圈数进行控制钢丝的伸缩距离。
进一步的,参考图7,其中步骤S300还包括:
步骤S301:根据两组第一环体之间或第一环体和第二环体之间的转动角度确定钢丝拉动每个连接位产生移动的移动距离。
步骤S302:根据钢丝拉动每个连接位产生的移动距离,和转动的第一环体和第二环体的组数,确定钢丝的整体移动距离。
连接位与相对的连接位之间的距离为第一环体31转动的半径R,每组第一环体31之间的转动角度为α,钢丝相对于连接点的移动距离S通过以下公式确定:S=R×tanα。之后,通过第一环体和第二环体32的组数n,及每组钢丝相对于连接点的移动距离S,可以确定钢丝的整体移动距离为L=S*n。为驱动内窥镜传动机构转动相应角度,钢丝的整体移动距离为L。
进一步的,所述齿条的分度与产生转动角度的单位量所需钢丝移动距离相对应。该方案有利于将齿轮和齿条控制提供的步进,转化为调整组件转动的步进,有利于配合实际需求,便捷的调整调整调整组件的转动角度。
请参阅图8,本实施方式还提供一种传动系统5。
传动系统包括采集模块51、控制器52及驱动装置53。采集模块51与控制器52电信号连接,控制器52与驱动装置53电信号连接。
采集模块51用于采集病体的腔道路径及内窥镜的行进位置。采集模块51可以包括扫描仪、感应仪器等。例如,扫描仪扫描得到病体的腔道路径。感应仪器可以感应到内窥镜位于上述腔道路径的位置。因此,根据患者病体的腔道路径及内窥镜的行进位置,可以得到内窥镜需要转动的转动角度。
控制器52用于根据采集模块51采集的位置信息,确定内窥镜的转动角度。并根据转动角度确定转动环体的组数n及每组环体的转动角度α。控制器52还可以根据环体的组数n及每组环体的转动角度α,在根据内窥镜的环体的半径R,得到牵引组件的钢丝的移动距离。
控制器52根据牵引钢丝的移动距离转换为驱动组件中齿轮的转动方向及转动圈数,并转换为驱动装置的控制信号,输出至驱动装置。
转动控制器52可以为处理器、芯片等。
驱动装置53可以用于驱动钢丝移动。具体地,驱动装置53通过驱动齿轮转动,带动钢丝移动,直至钢丝完成移动距离。通过对齿轮转动的圈数进行控制钢丝的伸缩距离。当钢丝完成移动距离后,驱动装置53停止运动,对齿轮进行锁定。
该驱动装置可以为电机。
显然,以上所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例,附图中给出了本发明的较佳实施例,但并不限制本发明的专利范围。本发明可以以许多不同的形式来实现,相反地,提供这些实施例的目的是使对本发明的公开内容的理解更加透彻全面。尽管参照前述实施例对本发明进行了详细的说明,对于本领域的技术人员来而言,其依然可以对前述各具体实施方式所记载的技术方案进行修改,或者对其中部分技术特征进行等效替换。凡是利用本发明说明书及附图内容所做的等效结构,直接或间接运用在其他相关的技术领域,均同理在本发明专利保护范围之内。
- 用于内窥镜的传动结构、内窥镜、传动方法及传动系统
- 一种应用于内窥镜的传动结构和内窥镜手柄