测量眼睛屈光
文献发布时间:2023-06-19 09:57:26
相关申请
本申请要求名称为“Measuring Eye Refraction”且于2018年2月22日提交的美国临时专利申请号62/634,061的优先权,其整体通过参考包括于此。
技术领域
本揭露通常涉及在不使用镜片的情况下测量眼睛屈光,尤其涉及用于眼睛屈光测量的移动装置应用。
背景技术
一般来说,测量眼睛屈光是漫长而相对复杂的过程,需要专门的设备和专门的培训。为获得矫正镜片的处方(Rx),患者通常必须去看验光师或其它专业临床医生,以接受眼睛屈光测量。此测试准确地确定患者需要的眼镜的处方。传统的屈光测量方法要求临床医生将患者置于离视觉刺激物(例如,一张具有验光字体(optotype)的被称为眼图或斯内伦图(Snellen chart)的尺寸不断缩小的字母表)的固定距离处。接着,该临床医生用临时矫正镜片反复覆盖一只眼睛,以计算出处方,从而得出使刺激物图像正确聚焦于患者的视网膜上所需的眼镜度数。执行该测试的传统方法包括使用由临床医生手动改变的试屈光镜片,以及自动改变镜片度数直至视觉刺激物被聚焦的自动屈光仪。这是漫长而昂贵的过程,需要访问临床医生以及使用专门设备的多步骤测试来接受矫正镜片。
尽管已尝试简化此过程,但在这些方法中存在严重的缺陷,从而导致有限的使用、测量误差以及可行性问题。
发明内容
本文提供方法、系统、以及装置,以在不使用镜片的情况下测量眼睛屈光,尤其利用移动装置应用来测量眼睛屈光。例如,在一个示例实施例中,提供一种方法,其包括:安装于移动装置中的图像获取单元自动测量患者与该移动装置之间的距离。该方法还包括:在该移动装置的显示器上呈现经尺寸设计及成形以表示完美视力的一个或多个视觉标靶(visual target)。该视觉标靶可包括游标(Vernier)标靶或光栅(grating)标靶。安装于该移动装置中的处理器基于所测量的距离确定准确的尺寸及形状。该方法还包括:指示该患者标示该患者是否能够准确读取该视觉标靶或区分视觉标靶与其它非标刺激物,若否,则更靠近该移动装置,直至该患者能够正确识别该视觉标靶。该方法还包括在该患者能够准确读取该视觉标靶的最终距离,安装于移动装置中的该图像获取单元再次自动测量该患者与该移动装置之间的该距离。该方法包括:该处理器基于该视觉标靶以及该患者与该移动装置之间的最终距离计算该患者的视力处方。该方法还包括:该显示器显示该患者的该视力处方。
该方法可具有多种变化。例如,可要求该患者准确识别未对齐的游标标靶。该视觉标靶还可包括在不同频率、对比度以及方向的光栅图案,其中,可要求该患者在其它灰片(gray patches)中检测该光栅图案。例如,可要求该患者准确识别多个刺激物中的哪一个相对于作为灰片的其余多个刺激物具有光栅图案。自动测量该距离可包括基于图像分析计算像素-角度比(pixel-to-angle ratio)。自动测量该距离还可包括:该处理器从该移动装置采样陀螺仪数据并从该图像获取单元采样图像;该移动装置指示该患者旋转该移动装置;该处理器基于该采样的陀螺仪数据以及该移动装置的该旋转计算旋转角度;该处理器跟踪多个图像上的特征点并基于该跟踪的特征点确定特征点偏移;以及该处理器基于该特征点偏移及该旋转角度计算像素-角度比。
该方法还可包括撷取该患者的面部的图像。在另一个例子中,自动测量该距离可包括撷取该患者的虹膜的图像。自动测量该距离还可包括:该图像获取单元撷取该患者的眼睛的图像;该处理器确定该图像中是否存在虹膜;该处理器测量该虹膜的直径;以及该处理器基于该患者的该虹膜的所测量的直径计算该患者与该移动装置之间的该距离。在另一个例子中,该处理器测量该虹膜的该直径还可包括将圆圈拟合(fitting)至该虹膜的边界。
在另一个实施例中,该方法可包括:在自动测量该距离之前,该移动装置指示该患者创建该患者的面部的3D模型并将该3D模型保存至该移动装置。自动测量该距离还可包括:该图像获取单元撷取该患者的当前面部图像;以及该处理器通过将该当前面部图像与储存于该移动装置上的该患者的该3D模型比较来测量该患者与该移动装置之间的该距离。在另一个例子中,自动测量该距离可包括:该图像获取单元撷取该患者的当前面部图像;该处理器检测该当前面部图像上的一个或多个面部特征;该处理器计算各该当前面部图像及该3D模型的以像素为单元的总体特征间距离;该处理器计算各该当前面部图像及该3D图像的该特征间距离之间的特征间距离比;以及该处理器基于该3D模型中的信息及该特征间距离比计算该患者与该移动装置之间的该距离。
在另一个态样中,提供一种方法,其包括:在该移动装置的显示器上呈现经尺寸设计及成形以表示完美视力的一个或多个未对齐的游标标靶。安装于该移动装置中的处理器基于该患者与该移动装置之间的该距离确定准确的尺寸及形状。该方法包括:该移动装置指示该患者通过位于该移动装置上的一个或多个输入单元向该移动装置标示该患者是否能够准确识别该一个或多个未对齐的游标标靶。若该患者能够正确识别该一个或多个未对齐的游标标靶,则该方法包括:该移动装置指示该患者不需要该患者的视力处方。若该患者无法正确识别该一个或多个未对齐的游标标靶,则该方法包括:该移动装置指示该患者更靠近该移动装置,直至该患者能够准确识别该一个或多个未对齐的标靶,且该处理器基于该视觉标靶以及该患者与该移动装置之间的距离计算该患者的该视力处方。
该方法可具有多种变化。例如,确定该患者与该移动装置之间的该距离可包括:该移动装置自动测量该距离。确定该患者与该移动装置之间的该距离可替代地包括:该患者手动测量该距离,且该患者通过位于该移动装置上的一个或多个输入单元将该距离输入该移动装置中。该移动装置可为手机、平板电脑或笔记本电脑的其中之一。确定该距离还可包括:该移动装置的相机及该处理器基于该移动装置以及执行该方法的房间的图像计算像素-角度比。确定该距离可包括:该移动装置的相机撷取该患者的面部的图像。确定该距离还可包括:该移动装置的相机撷取该患者的虹膜的图像。该方法还可包括:在确定该距离之前,该移动装置指示该患者创建该患者的面部的3D模型并将该3D模型保存至该移动装置。接着,确定该距离可包括:与该移动装置连接的相机撷取该患者的当前面部图像,以及该移动装置的该处理器通过将该当前面部图像与储存于该移动装置上的该患者的该3D模型比较来测量该患者与该移动装置之间的该距离。
在另一个态样中,提供一种用于视力处方测量的装置,其包括:至少一个壳体;图像获取单元,设于该壳体中并经配置以自动测量患者与该壳体之间的距离;显示器;以及处理器。该显示器位于该壳体的外表面的至少其中部分上,且该显示器经配置以呈现经尺寸设计及成形以表示完美视力的一个或多个视觉标靶。该视觉标靶包括游标标靶。该处理器设于该壳体中,且其经配置以基于所测量的距离确定该一个或多个视觉标靶的准确的尺寸及形状。该显示器还经配置以指示该患者标示该患者是否能够准确读取该视觉标靶,若否,则更靠近该壳体,直至该患者能够准确读取该视觉标靶。该图像获取单元还经配置以在该患者能够准确读取该视觉标靶的最终距离至少另外一次自动测量该患者与该壳体之间的该距离。该处理器经额外配置以基于该视觉标靶以及该患者与该移动装置之间的该最终距离计算该患者的视力处方,且该显示器经配置以接着显示所计算的视力处方。
附图说明
从下面结合附图所作的详细说明将更充分地理解本发明,该些附图中:
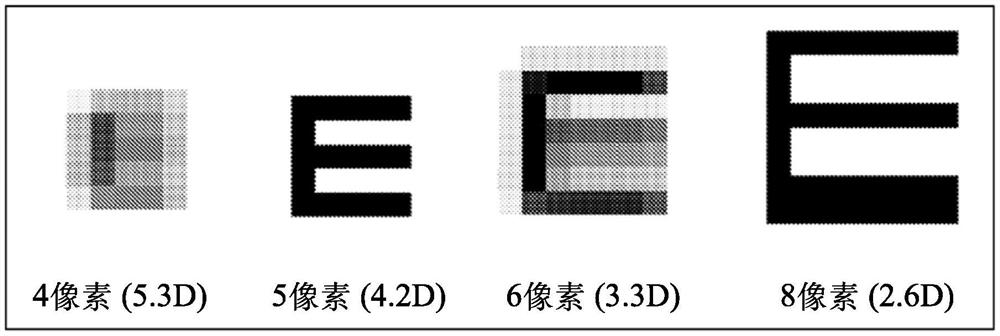
图1显示当使用眼睛屈光测量方法时无法被正确显示的验光字体字母;
图2显示在各种眼睛测量中所使用的同心图案上的伪影(artifact);
图3显示利用本文中所述的移动装置应用测量眼睛屈光的过程的一个实施例;
图4显示移动装置架构的示例示意视图;
图5显示该移动装置获取患者的眼睛的图像的示例视图;
图6显示该移动装置撷取一系列图像以估计像素-角度比的示例图像;
图7显示本文中所使用的计算像素-角度比的过程的一个实施例;
图8A显示通过本文中所述的移动装置撷取患者的眼睛的图像的示例场景;
图8B显示正在通过本文中所述的移动装置应用处理的患者的眼睛的示例图像;
图9显示利用患者的虹膜测量患者与本文中所述的移动装置之间的距离的过程的一个实施例;
图10显示利用患者的面部的3D模型测量患者与本文中所述的移动装置之间的距离的过程的另一个实施例;
图11显示利用患者的面部的3D模型测量患者与本文中所述的移动装置之间的距离的图10的过程;
图12显示高对比度的游标标靶的一个实施例;
图13显示低对比度的游标标靶的一个实施例;
图14显示第一、第三及第四方框为灰片且第二方框具有光栅图案的光栅标靶的一个实施例;
图15显示利用本文中所提供的移动装置应用对受试者执行的左眼测试结果;以及
图16显示利用本文中所提供的移动装置应用对受试者执行的右眼测试结果。
发明或申请文件包含至少一幅彩色附图。具有彩色附图的本专利或专利申请出版物的副本将在提出请求并支付必要的费用后由本局提供。
应当理解,上述附图并不一定按比例绘制,其提供有关示例本揭露的基本原理的各种优选特征的稍微简化的表示。包括例如特定尺寸、方向、位置及形状的本揭露的具体设计特征将部分地通过特定的预期应用及使用环境来确定。
具体实施方式
下文中,将参照附图详细说明本揭露的实施例。本领域的技术人员将意识到,可以各种不同的方式修改所述实施例,所有这些都不背离本揭露的精神或范围。而且,在整个说明书中,类似的附图标记表示类似的元件。
本文中所使用的术语仅是出于说明特定实施例的目的,并非意图限制本揭露。除非上下文中另外明确指出,否则本文中所使用的单数形式“一”、“一个”以及“该”也意图包括复数形式。另外,应当理解,术语“包括”和/或“包含”用于本说明书中时表明所述特征、整体、步骤、操作、元件和/或组件的存在,但不排除存在或添加一个或多个其它特征、整体、步骤、操作、元件、组件、和/或其群组。本文中所使用的术语“以及/或者”包括一个或多个相关所列项目的任意及全部组合。术语“耦接”表示两个组件之间的物理关系,该些组件借此相互直接连接或通过一个或多个中间组件间接连接。
应当理解,本文中所使用的术语“移动装置”或其它类似术语包括任意便携式计算装置,例如智能手机、平板电脑、笔记本电脑、PDA等。本文中所使用的“移动装置”不一定限于方便携带的装置,而是也可包括个人电脑(personal computer;PC)或其它类似计算机器。本文中所提到的“移动装置”装配有至少一个或多个处理器(如现有技术通常已知的那样),以及允许用户撷取给定受试者的照片的图像获取单元(例如,相机)。而且,“移动装置”较佳地装配有有线或无线通信组件,以允许该装置通过通信网络与外部装置通信。类似地,本文中所使用的术语“移动装置应用(application)”、“移动应用”或“应用”是指可由安装于“移动装置”中的处理器执行的电脑程序(program),如现有技术通常已知的那样。
还应当理解,本文中所使用的术语“患者”或其它类似术语包括任意受试者-人或动物,对其可执行眼睛评估。本文中所使用的术语“用户”包括能够与移动装置交互或控制移动装置的任意实体。“用户”也可为“患者”,或者“用户”与“患者”可为独立实体,如本文中所述的那样。
此外,应当理解,下面的方法中的一种或多种或其态样可由至少一个处理器执行。可将该处理器实施于移动装置中,如本文中所述。也可将经配置以储存程序指令的存储器实施于该移动装置中,在此情况下,该处理器经专门编程以执行所储存的程序指令,从而执行下面进一步说明的一个或多个过程。而且,应当理解,下面的方法可由包括该处理器的移动装置结合一个或多个额外组件执行,如下面详细所述。
而且,本揭露的方法或其态样可被实施为包含由该处理器执行的可执行程序指令的电脑可读媒体上的非暂时性电脑可读媒体。该电脑可读媒体的例子包括但不限于ROM、RAM、光盘(CD)-ROM、磁带、软盘、闪速(flash)驱动器、智能卡以及光数据储存装置。该电脑可读记录媒体也可被分布于网络耦接的电脑系统中,以例如通过远程信息管理服务器(telematics server)或控制器局域网络(Controller Area Network;CAN)以分布方式储存并执行该电脑可读媒体。
当确定患者的处方时,一个不需要任何光学镜片的过程是改变患者观看用以测量处方的对象的观看距离,且此过程可用以获得与使用镜片的处方过程类似的有益结果。在光学及验光中,不是改变至对象的实际距离,而是可使用负镜片,以针对实际远离患者的对象,在靠近患者的距离处形成对象的图像。因为如此,将对象移至更靠近患者通常类似于具有能够产生这样的图像的负镜片。然而,当试图基于此距离变化机制实施处方测量过程时,测量所涉及的距离(尤其在屈光测量中)以及靠近患者(或近距离)提供与通常离患者较远(或者远距离)的对象等同的视觉刺激物都带来挑战。在一些情况下,可尝试利用尺子(ruler)等手动测量距离。然而,手动测量距离可能是不准确的,耗时的,并需要专门知识及专门技能,这限制其可用性。简单地将视力表从远离患者移至更近的距离是不准确的,因为随着该视力表移动,该视力表上的有角字母尺寸变大。视觉辨别通常是指识别视觉图像中的细节的能力,且出于用于此距离变化过程的屈光测量的目的,应当针对所有距离保持对视觉辨别的一致要求。例如,若针对较近的距离使用较大的角度尺寸,则屈光误差将被低估,因为要求低于处于较远距离的对象。换句话说,在屈光测量中所获得的视力对于较远的距离及较近的距离应当相同。
在一种方法中,可将处方作为最佳视力的最大距离(Maximum Distance of BestVisual Acuity;MDBA)的倒数计算。然而,当在使用位图显示器(或光栅显示器)的系统中实施此原理时,现有技术仍然存在问题。例如,Limon的美国专利号9,549,669(“Limon”)讨论基于受试者的距离度量测量眼睛的屈光误差。但是,在Limon中所采用的方法存在一些根本性缺陷,导致可行性有限。作为一些非详尽的例子,Limon使用验光字体字母作为视觉标靶进行屈光测量。参见例如Limon的美国专利号9,549,669,图4F,图13A。此方法是一个问题,因为它限制可准确确定的处方的数目。例如,若近视患者需要将其视力矫正至20/16视力,则应当使用20/16字母来估计最佳视力的最大距离(MDBA)。假定患者需要4.2D镜片来看见20/16字母,则MDBA将为0.238m,且20/16字母E的线性尺寸应当为0.387mm,或者准确地,标准458PPI显示器(例如,用于iPhone X上)上的5个像素。可利用5个像素正确显示验光字体字母E,因为它由3个水平笔画(黑色像素)以及之间的2个间隙(白色像素)组成,如图1中所示。类似地,针对2.1D的处方可正确显示字母E,因为在0.476m的MDBA,线性字母尺寸应当为10个像素。然而,通过使用Limon中的方法,不会完美地映射至这5个像素因素要求的任何所需处方将需要图像缩放,从而导致验光字体的失真。例如,任何需要3.3D处方的人,20/16字母E将为6像素高。不可能显示1.2像素宽的笔画。通常,图形渲染会使字母模糊或者其中一个笔画为2像素宽。因此,该Limon方法无法正确地测量4.2D及2.1D之外的处方。若屏幕分辨率低于458PPI,则与5像素字母对应的MDBA将大于0.238m。这意味着Limon的方法可测量的最高处方将低于4.2D。因此,使用Limon中所述的方法将导致许多处方被错误地测量。
Limon还讨论测量至相机的观看距离,在没有专门知识的情况下,大多数人无法执行该测量。Limon讨论使用具有已知尺寸的参考标靶,且Limon讨论为了基于参考标靶估计距离,应当给出相机比,这是指提供EFL/Pitch。EFL是相机镜头的相机有效焦距,pitch是图像传感器上的相邻像素之间的物理距离。这些数字因不同的相机而异,且大多数人并不知晓。
Limon还讨论利用同心环图案测量散光。Limon的示例图例如图4J使用低空间频率。这意味着当患者看到这些图案时,该些图案并不实际代表患者的最佳矫正视力。因此,患者可清楚地看到这些低空间频率图案的距离实际上不是患者的正确MDBA。例如,再次使用想要获得20/16矫正视力的样本患者,他可看到的空间频率应当为每度37个周期。例如,对于需要4.2D的处方的患者,为了看到同心图案,从眼睛至屏幕的距离将为0.24m或更近。在此距离,该同心图案的每个环在458PPI显示器上将为1像素宽,在更低分辨率屏幕上甚至更小,这是不可能的。当环宽度仅为1像素宽时,在图像上将出现一些伪影,如图2中所示。造成该些伪影的根本原因是:沿对角线方向,空间频率是水平或垂直频率的1.414倍,因此无法被正确显示,因为它不是整数。屏幕分辨率(也就是,屏幕空间频率)仅在水平或垂直方向为环的2倍。依据Nyquist定理,屏幕分辨率仅大到足以使同心图案沿水平及垂直方向正确显示,但不足以沿对角线方向正确显示。这导致混叠(aliasing),从而造成伪影图案。换句话说,对于任何想要通过眼睛测试获得正确结果的人来说,普通移动装置的屏幕分辨率没有高到足以使用Limon中所教导的方法。人眼无法看到单个像素。如果可以,人们将在其屏幕上看到像素化的图像。由于必须使用低空间频率图案,因此Limon的方法可正确测量的屈光度数限于低端的且不是很准确的矫正视力。
由于这些及其它原因,对于许多需要简单的方式来测量眼睛屈光而无须访问临床医生的花费及麻烦的人来说,Limon中的方法并不有效。因此,尽管已尝试简化处方确定过程,但在当前方法中存在严重的缺陷,从而导致有限的使用、测量误差,以及可行性问题。所以,需要方法、装置、以及系统,以在不使用镜片的情况下测量眼睛屈光,尤其用于眼睛屈光测量的移动装置应用。
现在请参照本揭露的实施例,测量眼睛屈光是影响大多数成年美国人口以及更多国际人口的事情,许多人在其成年生活中接受某种形式的眼睛屈光测量。即使没有遭受任何类型的受损视力的人们也常常在其一生中接受眼睛检查,以确认不需要视力矫正,确实具有某种受损视力的人们常常需要每年接受眼睛检查,因为许多矫正镜片的处方最多只能接受1年。因此,大多数成年人及许多儿童接受或应当接受定期眼睛检查,从而需要昂贵的设备、长时间的检查,以及昂贵的费用。
为此,本文中揭露与用于测量眼睛屈光的移动装置应用相关的技术。在没有使用外部附件或附属物的情况下,该移动应用可基于患者与移动装置上的设备(例如显示器及相机)之间的基本交互来测量眼睛屈光。替代使用屈光镜片,本文中所揭露的方法通过测量患者可清楚地看到刺激物的距离来确定处方。改变患者与刺激物之间的距离,因此不需要矫正镜片。此方法可被任何需要眼睛屈光测量的人使用,尤其对有近视的人有用,如下面详细所述。
如图3中所示,眼睛屈光测量的一种示例方法包括:在步骤100,患者从离开正在运行本文中所述的应用的移动装置的给定距离开始。该移动装置经配置以显示视觉刺激物,该视觉刺激物将标示20/20或完美视力,且该移动装置经设置以使该患者可从该开始距离看到屏幕。接着,在步骤200,要求该患者标示她是否能够看到该移动装置的屏幕上的标示20/20视力的该视觉刺激物。若患者能够看到该视觉刺激物,则测量将终止,因为在步骤202不需要处方。若该患者无法看到该视觉刺激物,则在步骤300,要求该患者例如通过走向该移动装置来减小她自己与该移动装置上的该视觉刺激物之间的距离,并可计算或测量该患者与该移动装置之间的新距离。接着,在步骤400,该患者标示她是否能够看到该视觉刺激物。重复该观察所示视觉刺激物并根据需要减小距离以清楚地看到该刺激物的过程,直至患者可清楚地看到该移动装置上的该视觉刺激物。在步骤500,在此距离,通过计算1除以以米为单位的距离(在此处,视觉刺激物是清楚的)来计算患者的处方。通过利用安装于许多现代的移动装置中以计算对齐及距离的高分辨率相机(下面详细讨论)结合本文中所述的定制设计的图像处理算法,可获得高精度的眼睛屈光测量。整个处理被本地执行于移动装置本身上;因此,该应用不需要向远程服务器发送任何数据以供处理。基于所做的测量,可为该患者(尤其是目前市场上的许多其它测量方法不可用的近视患者)计算高精度处方。
一般来说,通过列出每只眼睛的球面及柱面的值来提供处方。球面值标示用于矫正近视或远视的以屈光度(D)测量的镜片度数的大小。若在此标题下出现的数字具有负号,则患者为近视,若数字具有正号,则患者为远视。术语“球面”标示近视或远视的矫正是球形的,意味着它在眼睛的所有子午线中相等。柱面标示矫正患者的任意散光所需的镜片度数的大小。柱面的数字的前面可具有负号(用于矫正近视验散光)或正号(用于远视散光)。术语“柱面”标示经添加以矫正散光的镜片度数不是球形的,而是经成形以使一条子午线没有附加曲率,且垂直于此“未添加度数”的子午线的子午线包含用以矫正散光的最大度数及镜片曲率。当检测散光时,还提供轴。此数字说明不包含用以矫正散光的柱面度数的镜片子午线。用从1至180的数字来定义轴,其中,数字90对应于眼睛的垂直子午线,且数字180对应于水平子午线。眼睛中的子午线是穿过眼睛的虹膜的经度恒定的圆圈。例如,若圆眼是钟面,则连接12点与6点的线将为一条子午线,连接3点与9点的线为另一条子午线,等等。
图4显示依据本揭露的实施例的移动装置架构的示例示意视图。如图4中所示,移动装置102可包含多个组件,包括但不限于处理器(例如,中央处理单元(CPU))110、存储器120、无线通信单元130、输入单元140、以及输出单元150。应当注意,图4中所述的架构经简化且仅用于示例目的。应当注意,图4中所示的架构被简化并仅出于示范目的。鉴于市场上销售的种类繁多的移动装置,可依据当前的权利要求以本领域的普通技术人员所理解的任意合适的方式修改本揭露中所提到的移动装置102的架构。图4中所示的移动装置架构应当仅被视为示例,且不应当被视为限制本揭露的范围。
下文中将简要说明移动装置102的组件,处理器110能够控制移动装置102的操作。更具体地说,处理器110可操作以控制安装于移动装置102中的多个组件并与其交互,如图4中所示。例如,存储器120可储存可由处理器110执行的程序指令。本文中所述的移动应用可以程序指令的形式被储存于存储器120中,以由处理器110执行。无线通信单元130可允许移动装置102通过通信网络向一个或多个外部装置传输数据并自其接收数据。输入单元140可使移动装置102能够接收各种类型的输入,例如音频/视频输入、用户输入、数据输入等。为此,输入单元140可由用于接收各种类型的输入的多个输入装置组成,包括例如相机142(也就是,“图像获取单元”)、触摸屏144、麦克风、一个或多个按钮或开关、陀螺仪146,等等。输入140中所包括的输入装置可由用户操控。例如,用户可以识别方式(也就是,由处理器110识别的方式)通过按压触摸屏144利用相机142撷取照片。相机142可包括面向前方(front-facing)的相机。在相机142中也可包括面向后方(rear-facing)的相机,但在本文中主要使用该面向前方的相机。要注意,本文中所使用的术语“图像获取单元”可指相机142,但不限于此。例如,该“图像获取单元”可指获取被本地储存于存储器120中或远程储存于服务器上的患者的图像的程序(program)。输出单元150可在显示屏152上显示信息,以供用户观看。显示屏152还可经配置以通过现有技术中已知的各种机制例如用户轻敲或按压屏幕152来接受一个或多个输入。输出单元150还可包括闪光产生装置154(也就是,“闪光灯”),它是能够产生光束的光源。闪光产生装置154可经配置以在相机142获取图像期间产生闪光。
因此,移动装置102可经编程以允许其执行下文中所述的用于眼睛屈光测量的技术。
在使用时,患者应当将移动装置102置于患者可看到显示屏152并可被图像获取单元例如相机142看到的位置。例如,患者可将移动装置102置于桌子、架子上、固定于墙上等。在移动装置102上的应用要求患者与移动装置102之间的开始距离被移动装置102知晓。为达到此目的,患者可在离开移动装置102的已知距离开始,可将患者与移动装置102之间的距离提供给移动装置102,或者该应用可通过各种方式自动测量移动装置120与患者之间的距离。在所有这些测量方法中以及通常在患者与移动装置102上的应用之间的整个交互中,该应用可以显示于显示屏152上的指令及/或图形210的形式向用户实时提供指导,以大体上帮助用户进行正确的测量及使用。接着,由移动装置102通过各种输入从患者接收的信息以及由相机142接收的信息可由处理器110处理,以确定患者与该移动装置之间的距离。
患者与移动装置102之间的开始距离可为设定距离,例如在约2至40英尺之间,例如8英尺、10英尺、12英尺、14英尺、16英尺、18英尺、20英尺、22英尺、24英尺、26英尺等。为了清楚地看到表示20/20视力的视觉刺激物,近视患者常常需要在短于6.1米(20英尺)的距离,例如0.5米(1.64英尺)。球面等效矫正将是距离的倒数,在此情况下,1/0.5=2D。因此,约20英尺通常被用作使用该应用的患者的开始距离。
患者与移动装置102之间的开始距离也可由患者或第二方手动提供给移动装置102,利用输入单元140通过各种机制提供距离,例如使用语音命令、通过触摸屏144物理键入、远程控制等。患者必须能够利用此方法测量距离,例如,通过使用卷尺(tape)。
开始距离还可通过使用移动装置102、输入单元140及/或相机142以及现有技术中已知的一种或多种合适的图像处理算法由该应用自动测量,这是对于患者来说使测量更简单的优选方法。例如,在下面的讨论中,可使用各种合适的图像处理算法,例如自适应阈值分割算法(adaptive thresholding algorithm)。有各种不同的方法来测量患者与移动装置102之间的距离。例如,如图5中所示,该应用可测量图像中的患者的两眼之间的距离(IPD)并接着利用下式计算距离:
VD=PDP/tanθ
其中,VD是患者与相机142之间的观看距离,PDP是瞳孔内距离的物理尺寸(IPD),θ是半IPD的跨度角。
对于单个患者,PDP可通过使用尺子预先测量或者可通过处理患者的面部的快照来测量,并利用下式计算:
PDP=(PDX/IRSX)×12
其中,PDX是以像素为单位的IPD,IRSX是以像素为单位的患者的虹膜直径。上式子中的θ值以度为单位。它通过像素-角度(pixel to angle)转换因子P2A从像素转换为角度。该转换因子可通过使用移动装置102的陀螺仪146的测量以及旋转该装置时的跟踪图像偏移来确定,下面在图6及7中进行解释及示例。
如图6及7中所示,为确定θ以及从像素至角度的转换因子P2A,患者可首先将相机142对准房间中的对象,较佳地,几米远,例如在约2米至约20米之间,例如约2米、3米、4米、5米等。接着,在步骤600,移动装置102开始采样陀螺仪数据146,并在步骤602,开始从相机142采样多个视频帧。接着,在步骤604,患者可略微旋转移动装置102,从而相机142所撷取的图像将偏移,由图6中所示的偏移点标示。接着,在步骤606,停止陀螺仪数据146以及相机142的视频帧两者的采样。在步骤608,利用来自移动装置102偏移或旋转时的数据,通过来自陀螺仪146的数据可测量旋转角度θ。可通过对象跟踪或光流跟踪来确定图像偏移量(以像素为单位),例如,在步骤610,利用现有技术中已知的一种或多种算法,跟踪相机142所拍摄的多个图像上的特征点并汇总所跟踪的特征点以确定特征点偏移S。接着,在步骤612,通过特征点偏移S除以旋转角度θ来确定像素-角度转换因子。
在该应用中,本文中的操作将被大部分自动化,仅要求用户遵循几个简单的步骤:首先将相机142对准用户,可能在该应用的一些方法中进入手动测量PDP,并将相机142对准几米远外的对象,接着偏移相机142。该应用可自动处理移动装置102所撷取的图像。此外,PDP及角度比例因子被确定并保存于移动装置102中,作为针对患者及移动装置102的两个常数。该过程仅在首次使用该应用时一次校准,且无需重新校准(因为在该应用使用期间持续使用患者与移动装置102之间的距离)。
还可使用另一种确定观看距离的方法,其与上述方法类似但不包括测量PDP。此方法尤其在观看距离短时有用。如图8A-9中所示,在步骤700,患者覆盖一只眼睛并观看移动装置102的显示屏152上的刺激物,同时相机142撷取该观看的眼睛的图像,且处理器110处理该图像。该方法可包括:在步骤702,检测该图像中是否存在未覆盖的眼睛,并在步骤704,确定存在多少未覆盖的眼睛。若在步骤704有两只眼睛可见,则在步骤706,通过显示屏152及/或装置102中的扬声器指示患者覆盖一只眼睛;若在步骤704没有眼睛可见,则在步骤708,该方法指示患者眨眼,并在步骤710,利用相机142继续撷取多个图像,以确定患者是否在眨眼。为帮助装置102成功撷取图像,在步骤712,该应用可处理图像以检测眨眼并储存图像中眨眼的位置,从而在撷取另一个图像时,该应用可确定眼睛应当在图像中的位置。一旦该方法检测到仅一只眼睛可见,则在步骤714,在装置102上的总体应用中运行的软件子应用通过将圆圈拟合至虹膜边界并测量以像素为单位的虹膜直径来处理该观看的眼睛的图像,从而提取虹膜边缘。接着,在步骤716,基于利用下式从这些图像计算的直径来计算观看距离:
VD=6/[tan(IID/P2A)]
其中,IID是以像素为单位的患者的虹膜的直径,P2A为像素-角度转换因子,其基于上面以及图6及7中的说明确定。因此,可由移动装置102或者使用移动装置102的另一人指示患者遵循上述步骤,以允许该应用获取必要的信息。
另一种用以测量观看距离的方法是基于移动装置102所撷取的患者的面部的尺寸的变化,如图10及11中所示。在使用该应用之前,患者需要创建他自己的面部的3D轮廓。患者必须将相机142对准他的面部并围绕其面部旋转相机142,从不同角度拍摄多张面部照片。可执行单目SLAM(同时定位与映射;simultaneous localization and mapping)分析,以创建患者的面部的3D轮廓。SLAM是通常用于机器人科学中的一种计算机视觉方法,如J.Civera等人的“Inverse Depth Parametrization for Monocular SLAM,”IEEETransactions on Robotics,vol.24,no.5,pp.932-945,Oct.2008所述,其可在http://ieeexplore.ieee.org/stamp/stamp.jsp?tp=&amumber=4637878&isnum ber=4663225找到且其整体通过参考包括于此。在该论文中,提供实时的(30Hz)全自动3-D SLAM系统,其特征为手持式单相机方法,没有额外感测。然而,在本文中可使用替代的3D映射方法。例如,撷取该3D轮廓的一种替代方法是通过面部识别相机,例如iPhone X中可用的那些。
因此,患者初始撷取他的面部的3D轮廓。该应用具有用户的面部的初始轮廓,在使用期间将拍摄的图像与该初始轮廓比较。在使用该应用期间,在步骤800,该应用检索患者的面部的3D轮廓,并在步骤802,依据给定的观看或参考距离RD(例如在1米的距离)及P2A(如上所述计算)重新创建面部图像。接着,在步骤804,相机142在使用期间实时撷取患者的面部的图像,并在步骤806,该应用检测患者的面部上的几个面部特征。接着,在步骤808,该应用计算以像素为单位的总体特征间距离,并在步骤810,在初始由患者提供的参考3D轮廓与所撷取的图像之间比较特征间距离比,从而得到所撷取的特征间值IFC与参考特征间值IFR之比。接着,在步骤812,通过将给定的观看或参考距离RD乘以所撷取的特征间值IFC与参考特征间值IFR之比来计算距离:
距离=RD×(IFC/IFR)
因此,为测量观看距离,首先计算在给定距离的面部尺寸与依据3D面部轮廓重新创建的面部尺寸之比,接着将该比值乘以重新创建的面部的给定观看距离。还需要将重新创建的参考面部方向与距离确定期间所撷取的面部图像匹配。此外,为最大限度地减小误差,上面所计算的比值可为多个面部特征对(例如,从眼睛至鼻子的距离,从嘴至眼睛的距离,以及两眼之间的距离)的比值的平均值。
通过上述方法的任意其中一种,该应用可确定患者与移动装置102之间的观看距离。
在确定观看距离以后,移动装置102经配置以显示视觉刺激物,该视觉刺激物将标示针对该观看距离的20/20或完美视力。例如,输出单元150可在显示屏152上向患者显示信息,处理器110可确定显示的内容。因此,所显示的视觉刺激物的尺寸可依据患者与移动装置102之间的距离而变化。例如,若观看距离为2米,且相应地以标准的20/20尺寸显示该视觉刺激物,接着,该应用确定患者从2米远移至1米远,则可将该视觉刺激物的尺寸减小至先前的标准20/20尺寸的一半,从而该视觉刺激物的角度尺寸将保持20/20。因此,所测量的患者与移动装置102之间的观看距离可影响该视觉刺激物的尺寸,从而该应用将依据该距离来改变所显示的线性尺寸。
尽管视觉刺激物可采取多种形式,但其中一种优选方法是使用游标刺激物(Vernier stimuli)。当患者患近视时尤其如此,因为近视患者必须近距离观看移动装置102,且当观看距离短时,验光字体(例如斯内伦字母)可能无法正确显示,如上关于Limon的问题所述。因此,较佳地使用游标刺激物(具有高或低对比度)。
图12及13显示游标刺激物的两个例子。患者比较图12或图13中所示的刺激物并标示四个游标标靶中的哪一个未对齐。标靶的颜色可具有高对比度,如图12中所示,或具有低对比度,如图13中所示。对于患者来说,低对比度的标靶更难观察,因此所导致的屈光测量将更准确。
在测试期间,患者识别未对齐的标靶。若患者不能正确识别未对齐的视觉刺激物,则要求患者例如通过走向移动装置102来减小她自己与移动装置102上的视觉刺激物之间的距离。例如,输出单元150可在显示屏152上显示无序的刺激物,且该应用可确定该患者的响应是否正确。若患者不能正确识别未对齐的刺激物,则该应用可例如通过显示屏152、通过装置102中的扬声器等与患者沟通,以更靠近显示装置102。在更近的距离,患者接着再次报告哪一个为未对齐的视觉刺激物。若她仍然不能正确识别,则她再次更靠近视觉刺激物,直至患者可清楚地看到移动装置102上的视觉刺激物并正确识别未对齐的标靶。每个新距离可利用上述讨论的方法由移动装置102自动确定,或者可由患者或第二方手动输入。而且,在每个步骤,处理器110可从用户接收输入并协调和处理该应用的输出。
另一种优选测试方式是使用光栅测试。图14显示在光栅测试中所使用的标靶的例子,例如一个或多个方框。图14显示具有四个方框的示例实施例。该些方框的其中之一具有光栅图案,而其余方框具有平坦的灰色。在测试期间,患者从一个或多个其它标靶(为简单的灰片)中识别具有光栅图案的刺激物。光栅是用紧密的平行线标记或画出的图案,且该图案以其空间频率、对比度以及方向为特征,从而没有令人满意的视力的患者将无法察觉标靶中的光栅(其应当显示为较亮及较暗的条纹),而是将把光栅图案标靶视为与所提供的其它标靶相同的灰片。光栅的总亮度(与亮条纹及暗条纹的平均值对应)与灰片的亮度相同。与验光字体字母或同心图案不同,当光栅间距大时,光栅图案不会失真,因为标靶的图案由直线构成。根据定义,具有20/20视力的人应当能够看到具有高对比度的30个周期/度的光栅。当移动装置的显示屏的分辨率没有高到足以显示30个周期/度的光栅时(很可能在短的观看距离),光栅频率可低于30个周期/度。在这样的情况下,也将降低光栅对比度,而不影响患者接收准确的眼睛屈光测量的能力,例如,通过基于对比敏感度函数降低光栅对比度。因此,屏幕分辨率将不妨碍准确显示视觉标靶,且本文中所述的方法可用以准确识别患者可获得良好视力(例如20/20视力)的处方。
在患者可清楚地看到视觉刺激物的距离,通过计算1除以距离(在此处,视觉刺激物是清楚的以及/或者患者可正确识别未对齐的标靶)来计算患者的处方:
所计算的Rx=1/DIST
其中,所计算的Rx为患者的处方,DIST为患者与视觉刺激物之间的以米为单位的距离,在此处,患者可清楚地看到刺激物。因此,至少在眼睛屈光测量结束时也需要知道患者与移动装置102之间的距离。该距离可通过上面提供的方法确定,例如,手动地或自动地。此外,患者必须能够标示她能够清楚地看到视觉刺激物(在此时,该应用结束测试)或可选地,能够标示她不能看到视觉刺激物(在此时,她可更靠近移动装置102)。患者能够清楚地看到视觉刺激物的标示可利用输入单元140通过各种机制由患者或第二方手动提供给移动装置102,例如使用语音命令、通过触摸屏144物理键入、远程控制等。实时观看距离更新对于该应用确定准确的处方很重要,如下面详细说明。在其它实施例中,可使用不同的视觉刺激物,例如图14中的光栅图案,在此情况下,患者将继续向移动装置102前进,直至她能够清楚地看到每个刺激物标靶。
通过使用本文中所提供的应用与优选的游标刺激物,还可诊断并测量散光。可基于患者对多个方向的游标刺激物的分辨能力差别估计散光轴。例如,若患者有相同的能力来检测所有方向上的游标刺激物的未对齐,则患者应当没有散光。若患者难以识别沿水平或垂直取向的刺激物的未对齐,则患者患有散光,且散光轴可能接近水平或垂直。此外,若散光轴接近水平或垂直,则患者对于未对齐的对角线标靶的分辨能力应当大致相同,反之亦然。该应用可通过使用更多的方向(这将给应用更多关于患者难以识别刺激物的未对齐的数据,并因此可提供更多的数据以供更准确的估计)进行更精确的散光轴估计,从而致力于更精确地识别散光。
一旦利用上面的方法确定患者的散光轴,即可通过改变观看距离直至垂直的游标刺激物标靶变得清楚来测量柱面矫正。例如,若患者可在0.25米处清楚地看到水平游标刺激物标靶,但她需要移至0.2米处以清楚地看到垂直游标刺激物标靶,则她的处方可通过本文中的应用及方法被确定为-4D球面、-1D柱面、轴90度。因此,可使用游标刺激物来识别并正确地开出患者的散光处方,而其它方法则不能(例如,Limon中所采取的那些方法)。在此情形下,对于患者来说,重要的是向该应用提供持续的数据,而不是简单地足够近地走近移动装置102并确定最终距离。这里,当改变游标标靶且患者越来越靠近移动装置102时,该应用可指示患者提供持续的反馈,从而该应用可确定何时垂直游标刺激物标靶与水平游标刺激物标靶相比是清楚的。
与使用游标刺激物类似,也可利用光栅图案诊断并测量散光。可基于对多个方向的光栅图案的分辨能力差别估计散光轴。例如,若患者有相同的能力来看到所有方向的光栅,则患者应当没有散光。在测试期间,若患者难以识别沿水平或垂直取向的光栅,则患者患有散光,且散光轴可能接近水平或垂直。因此,该应用可在确定患者的处方时考虑此信息。
如上所述,出于几个原因,本文中所述的当前测量眼睛屈光的方法优于现有技术(例如Limon)。例如,如前所述,Limon使用验光字体字母作为标靶,这可依据正在使用的移动装置的显示器的分辨率以及所需的处方引起标靶的失真。本文中所述的应用通过使用游标或光栅标靶能够消除此问题。游标标靶由对齐的或稍微不对齐的两条短线组成。在测试期间,患者识别未对齐的刺激标靶。通过使用此刺激方法而不是更常见的方法例如验光字体字母,就像素而言的线宽及未对齐可为任意整数。因此,当显示刺激物时没有失真,且如下面所示的测试结果,本文中所提供的方法可准确地测量从0至7的屈光。在现有移动装置显示器上使用验光字体字母是不可能的。此外,在本文中所提供的应用中,患者与移动装置之间的距离测量比现有技术例如Limon简单。如所述那样,Limon教导使用具有已知尺寸的参考标靶以及要求患者提供相机比EFL/Pitch的校准方法。同样,具有移动装置的大多数消费者不知道这些值。这里,与之相反,多种方法被提供并可用以估计观看距离,其中许多方法是自动的且对于患者来说更容易执行。而且,现有技术不提供估计散光的有效方法。如上所述,Limon教导使用同心环图案测量散光的方法,该些图案不会正确地显示于大多数移动装置上。普通移动装置的屏幕分辨率根本没有高到足以获得良好的散光处方。然而,如上所述,本文中提供的应用所使用的方法导致非常准确的散光测量(例如,利用游标刺激物标靶进行散光测量),因为单线图案不会遭遇伪影问题。
测试数据:
如图15及16中所示,对30个受试者测试本文中所提供的应用及方法。每个受试者首先利用自动屈光仪(Topcon,RM8000B)进行双眼的眼睛屈光测量。接着,利用所揭露的方法测试双眼。在电脑屏幕上呈现游标刺激物。手动测量从受试者至屏幕的距离,并依据距离改变刺激标靶尺寸。如图15及16中的结果所示,利用本文中所述的方法测量的屈光与自动屈光仪结果匹配很好,斜率几乎为1且R平方很高。
应当注意,文中所示的步骤仅为说明示例,如需要可包括或排除特定的其它步骤。另外,尽管本文中的附图中显示各种特定顺序的步骤,但此顺序仅为示例,可使用该些步骤的任意合适的安排,而不背离本文中的实施例的范围。而且,依据当前权利要求的范围,可以任意合适的方式修改所示步骤,
因此,本文中所述的技术允许使用广泛可用的移动装置例如智能手机、平板电脑等测量眼睛屈光。该移动装置可利用已被安装于许多现代的移动装置中的本地硬件,例如相机、显示器、以及各种输入。整个处理被执行于移动装置本身上,而不是将数据及/或所撷取的照片发送至远程服务器以供处理。
有利地,该移动应用促进快速、方便且廉价的方式来测量患者的眼睛屈光。快速方便地提供客观测量的能力对于经常看大量患者的临床医生非常有益。或者,可在家使用该应用,例如,由出于各种原因(例如成本、便利等)无法访问临床医生的办公室的患者使用。更容易获得的眼部筛查可帮助减少遗漏、不准确,以及/或者过时的诊断。该应用也很适合于远程医疗,其可用于偏远的、服务水平低下的地区,或者用于治疗的远程随访,而患者不必访问医生。另外,由于现代的移动装置相机的高分辨率功能,该应用可做出利用传统方法难以执行的准确测量。此外,该应用是稳健的,因为它能够处理各种条件以及受试者与测试场景之间的距离、设置以及眼睛外观的变化性。
尽管显示并说明了提供移动装置应用进行眼睛屈光测量的示例实施例,但应当理解,可在本文中的实施例的精神及范围内作各种其它修改及变更。例如,尽管在本揭露中常常提到移动装置,但本文中所述的技术也可实施于台式电脑或类似机器上。因此,依据当前权利要求的范围可以任意合适的方式修改本揭露的实施例。
上面的说明涉及本揭露的实施例。不过,显然,可对所述实施例作其它变更及修改,实现所有其优点的其中一些或全部。因此,此说明仅为示例,而不是另外限制本文中的实施例的范围。
- 测量眼睛屈光
- 屈光测定器以及采用此屈光测定器测量屈光的方法