一种无人汽车应急强制熄火停车机构
文献发布时间:2023-06-19 10:13:22
技术领域
本发明属于车辆电气技术领域,具体涉及一种无人汽车应急强制熄火停车机构。
背景技术
近几年,随着自动化专业发展,无人驾驶汽车有着十分广阔的发展前景,尤其在军用领域,无人驾驶汽车经过简单的改装便可以降级应用在科研院所、部队的试验、演习中。经无人驾驶汽车改装的无人移动靶车在接收不到控制信号、控制信号卡死等异常情况下无法安全停车,给试验、演习安全性带来了巨大的隐患,国内某项目在试验过程中就曾经出现过导弹命中无人驾驶靶车后,破坏了靶车的自动驾驶部件,导致靶车在试验场地无法停车。参考相关研究发现,目前国内采用的无人驾驶汽车应急停车无非以下几种方式:
1.燃油定量法,试验前根据试验过程中汽车行驶的路程估算需要的最大燃油消耗,在汽车油箱中添加相应的燃油,试验有效行程结束后,燃油基本耗尽,汽车自动熄火。这种方案在某些无人驾驶靶车项目中已经得到应用,成本低廉,可靠,但是燃油用量不好估算,控制偏差较大,容易出现汽车行驶到尽头后仍有燃油,汽车无法停止,也容易出现在汽车行驶途中自动熄火,影响试验的效果,尤其在试验联试准备过程中,多次出现燃油耗尽停车,损坏汽车发动机;
2.人员遥控操作优先法,确保遥控器数据畅通的情况下,可以将遥控器的控制不经过车载控制器,直接接入刹车舵机,当出现异常或试验结束时,可以远程遥控刹车或者遥控关闭油路,这种方式正常工作的前提是遥控器,遥控数据链,刹车舵机均工作正常,只可以有效解决车载控制器异常工作的问题,安全隐患仍然很大;
3.遥控断电法,和方案2类似,只是遥控器的执行端换成了汽车发动机点火电路,需要汽车停止时,远端遥控器切断了汽车火花塞点火回路,汽车熄火停车,这种方案的缺点和方案2类似,无法排除数据链路终端出现的异常,造成的安全隐患。
发明内容
(一)要解决的技术问题
本发明要解决的技术问题是:为了解决上述现有无人靶车由于数据传输链路中断,燃油定量法和人员遥控操作带来的弊端所造成的安全隐患,需要提出一种结构简单,安全可控的无人汽车应急强制熄火停车机构。
(二)技术方案
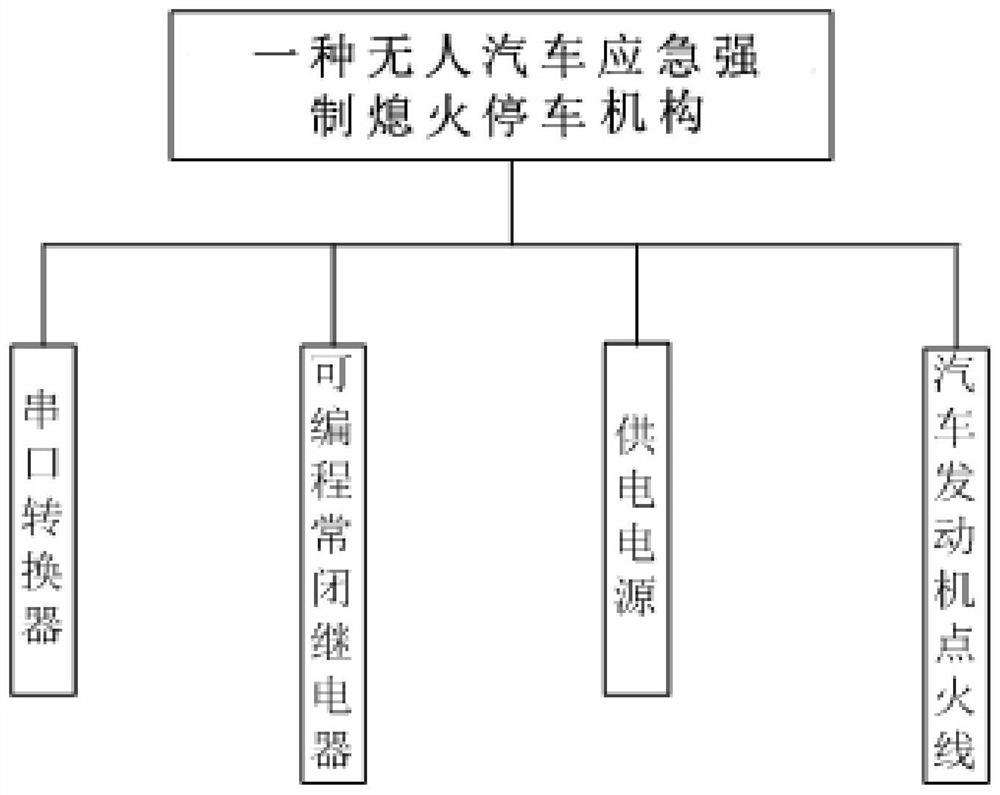
为解决上述技术问题,本发明提供一种无人汽车应急强制熄火停车机构,其包括:串口转换器、可编程常闭继电器、供电电源、汽车发动机火花塞点火线;
所述可编程常闭继电器的输出端串联接入汽车发动机火花塞点火线的点火回路,供电电源接入可编程常闭继电器的供电端;
串口转换器分别连接控制器与可编程常闭继电器;
当无人汽车启动时,控制器发出无人汽车延时断电信号,所述串口转换器用于接收控制器发出的无人汽车延时断电信号,可编程常闭继电器根据延时断电信号开始执行倒计时,当倒计时时间到时,可编程常闭继电器自动切断汽车发动机火花塞点火线的点火回路,实现无人汽车的熄火停车。
其中,所述串口转换器用来接收控制器发出的无人汽车启动信号,启动信号中包括无人汽车延时断电信号。
其中,所述串口转换器用于将控制器的USB信号转换为232信号。
其中,所述串口转换器用于将控制器的USB信号转换为TTL信号。
其中,所述可编程常闭继电器设置为可以手动进行设置或程序进行设置继电器工作模式以及延时断开时间;
当收到延时断电信号时,所述可编程常闭继电器开始按照设置的时间段进行倒计时,倒计时时间到断开输出继电器的开关。
其中,所述可编程常闭继电器由所述供电电源供电。
其中,所述无人汽车为无人靶车。
其中,所述汽车发动机火花塞点火线设置于无人汽车方向盘下方的控制盒内。
其中,所述控制器为PC上位机。
其中,所述控制器为工控机。
(三)有益效果
与现有技术相比较,本发明为了解决上述现有无人靶车由于数据传输链路中断,燃油定量法和人员遥控操作带来的弊端所造成的安全隐患,而提出一种无人汽车应急强制熄火停车机构,该机构结构简单,安全可控,适应于车辆电气技术领域,尤其是无人移动靶车。
附图说明
图1为本发明无人汽车应急强制熄火停车机构组成示意图。
图2为本发明无人汽车应急强制熄火停车机构原理图。
其中,1-串口转换器、2-供电电源、3-可编程常闭继电器、4-汽车发动机火花塞点火线。
具体实施方式
为使本发明的目的、内容、和优点更加清楚,下面结合附图和实施例,对本发明的具体实施方式作进一步详细描述。
为解决上述技术问题,本发明提供一种无人汽车应急强制熄火停车机构,如图1所示,其包括:串口转换器、可编程常闭继电器、供电电源、汽车发动机火花塞点火线;
所述可编程常闭继电器的输出端串联接入汽车发动机火花塞点火线的点火回路,供电电源接入可编程常闭继电器的供电端;
串口转换器分别连接控制器与可编程常闭继电器;
当无人汽车启动时,控制器发出无人汽车延时断电信号,所述串口转换器用于接收控制器发出的无人汽车延时断电信号,可编程常闭继电器根据延时断电信号开始执行倒计时,当倒计时时间到时,可编程常闭继电器自动切断汽车发动机火花塞点火线的点火回路,实现无人汽车的熄火停车。
其中,所述串口转换器用来接收控制器发出的无人汽车启动信号,启动信号中包括无人汽车延时断电信号。
其中,所述串口转换器用于将控制器的USB信号转换为232信号。
其中,所述串口转换器用于将控制器的USB信号转换为TTL信号。
其中,所述可编程常闭继电器设置为可以手动进行设置或程序进行设置继电器工作模式以及延时断开时间;
当收到延时断电信号时,所述可编程常闭继电器开始按照设置的时间段进行倒计时,倒计时时间到断开输出继电器的开关。
其中,所述可编程常闭继电器由所述供电电源供电。
其中,所述无人汽车为无人靶车。
其中,所述汽车发动机火花塞点火线设置于无人汽车方向盘下方的控制盒内。
其中,所述控制器为PC上位机。
其中,所述控制器为工控机。
实施例1
本实施例如图2所示,提供一种无人汽车强制应急熄火停车机构,其将可编程常闭继电器3的输出端串联接入无人靶车方向盘下方的控制盒的汽车发动机火花塞点火线4回路,供电电源2接入可编程常闭继电器2的供电端,连接串口转换器1和可编程常闭继电器3,接通串口转换器1和控制器(一般为PC上位机或工控机),调节可编程常闭继电器3的拨码开关,设置相应的定时间隔。依据使用协议,控制器向串口发送可编程常闭继电器3闭合与断开命令,测试时间间隔到可编程常闭继电器3输出端的工作情况。
根据一种无人汽车强制应急熄火停车机构,将延时继电器安装在无人靶车上进行试验测试,无人靶车启动后到达预设的定时时间,无人靶车发动机自动熄火,无人靶车安全停止,再次启动时,接通点火回路,靶车正常启动。在靶车运动的过程中,人为干预断开了控制端的电台电源,切断控制回路,靶车仍然在规定的时间熄火停车。
经过多次外场测试和破坏性测试表明该靶车熄火停车方案设计合理,工作可靠,使用方便,具有创新性和普适性。
实施例2
本实施例的无人汽车应急强制熄火停车机构包括:串口转换器、供电电源、可编程常闭继电器、汽车发动机火花塞点火线等组成。
所述串口转换器用来接收控制器发出的靶车启动信号,将控制电脑的USB信号转换为232信号或TTL信号;
所述供电电源主要给可编程常闭继电器供电,一般为12V或24V;
所述可编程常闭继电器通过手动设置或程序自动设置继电器工作模式,延时断开时间,当收到无人靶车启动命令时,按照设置的时间段进行计时,计时时间到断开输出继电器的开关;
所述汽车发动机火花塞点火线路,接通时,无人靶车可以正常开动,当断开时,无人靶车发动机火花塞不工作,汽车熄火。
以上所述仅是本发明的优选实施方式,应当指出,对于本技术领域的普通技术人员来说,在不脱离本发明技术原理的前提下,还可以做出若干改进和变形,这些改进和变形也应视为本发明的保护范围。
- 一种无人汽车应急强制熄火停车机构
- 一种无人直升机应急熄火控制系统