一种斑马线自动涂设机器人
文献发布时间:2023-06-19 10:16:30
技术领域
本发明涉工程机械领域,尤其涉及一种斑马线自动涂设机器人。
背景技术
在日常的马路斑马线的喷涂中,经常看到是由人工来完成喷涂的,这样不仅使得工作量大大增加,工作效率也不高,并且人工在马路上操作具有一定的危险性。为了解决这一问题,申请号:CN206543660U公布了一种超高速微量喷涂装置,该发明在一定程度上解决了喷涂质量的问题,但是其喷涂的范围有限,不能用于斑马线的喷涂。
发明内容
针对上述技术问题本发明提供了一种斑马线自动涂设机器人,包括走行装置、走行小车、调整装置、涂设装置、避障传感器,所述走行装置固定安装在走行小车上,走行小车是整个装置的支撑安装架,调整装置固定安装在走行小车上,涂设装置固定安装在调整装置上,避障传感器固定安装在走行小车上。
所述走行装置包括:走行轮、减速器、电动马达、马达座、下部插销、下部U型槽、转向杆、上部插销、上部U型槽、转向连接板、转向轴、转向轴承、转向轴承座、转向座、辅助轮安装座、辅助轮连接体、辅助轮连接板、辅助轮安装轴、辅助轮,走行轮转动安装在减速器上,减速器固定安装在马达座上,电动马达固定安装在马达座上,马达座固定安装在转向座上,下部插销转动安装在下部U型槽上,转向杆转动安装在下部插销上,上部插销转动安装在转向杆上,上部U型槽固定安装在转向连接板上,转向连接板固定安装在横隔梁上,转向轴转动安装在转向轴承上,转向轴承固定安装在转向轴承座上,转向轴承座固定安装在转向座上,辅助轮安装座固定安装在下端梁上,辅助轮连接体转动安装在辅助轮安装座上,辅助轮连接板固定安装在辅助轮连接体上,辅助轮安装轴转动安装在辅助轮连接板上,辅助轮转动安装在辅助轮安装轴上。
所述走行小车包括:下端梁、立柱、上端梁、边梁、横隔梁、蓄电池箱、蓄电池,下端梁固定安装在辅助轮安装座上,立柱固定安装在下端梁上,上端梁固定安装在立柱上,边梁固定安装在立柱之间,横隔梁固定安装在边梁之,蓄电池箱固定安装在边梁上,蓄电池固定安装在蓄电池箱内。
所调整装置包括:调整装置座、回转轴、挡圈、三角板、耳板、顶罩、一级摆动轴、指示灯、按钮开关、电气柜、下连接臂、电动推杆座、上连接臂、电机、电动推杆、电动推杆连接座、二级摆动轴、二级摆臂、三级摆臂、执行臂、调整油缸、调整油缸座、调整轴、调整槽、横杆、定位挡板、托板、底部轴,调整装置座固定安装在边梁上,回转轴转动安装在调整装置座上,挡圈转动安装在回转轴上,三角板转动安装在回转轴上,耳板固定安装在三角板上,顶罩转动安装在回转轴的顶部,一级摆动轴转动安装在耳板上,指示灯固定安装在电气柜上,按钮开关固定安装在电气柜上,电气柜固定安装在上连接臂上,下连接臂转动安装在一级摆动轴上,电动推杆座固定安装在下连接臂上,上连接臂转动安装在一级摆动轴和二级摆动轴上,电机固定安装在电动推杆上,电动推杆的一端转动安装在电动推杆座上,另一端转动安装在电动推杆连接座上,电动推杆连接座固定安装在二级摆臂上,二级摆动轴转动安装在二级摆臂上,三级摆臂固定安装在二级摆臂上,执行臂固定安装在托板上,调整油缸转动安装在执行臂和调整油缸座上,调整油缸座固定安装在执行臂上,调整轴转动安装在调整槽上,调整槽固定安装在横杆上,横杆固定安装在定位挡板之间,两个定位挡板固定安装在横杆的两端,托板转动安装在底部轴上,底部轴转动安装在三级摆臂上。
所述涂设装置括:涂设底座、侧板、调整阀、止挡、接收头、调整螺母、启动器、连接座、连接底座、过度阀、过度器、过度器底座、旋转按钮、喷涂缸、喷涂头,涂设底座固定安装在托板上,侧板固定安装在涂设底座上,调整阀固定安装在侧板上,止挡固定安装在侧板上,接收头转动安装在启动器上,调整螺母转动安装在接收头上,启动器固定安装在涂设底座上,连接座固定安装在连接底座上,过度阀转动安装在过度器上,过度器底座固定安装在涂设底座上,旋转按钮转动安装在喷涂缸上,喷涂缸转动安装在连接座上,喷涂头转动安装在喷涂缸上。
进一步的,所述的转向轴与转向轴承通过轴孔形成转动配合。
进一步的,所述的辅助轮安装座与辅助轮连接体通过轴孔形成转动配合。
进一步的,所述的辅助轮安装轴与辅助轮通过轴孔形成转动配合。
进一步的,所述的回转轴与调整装置座通过轴孔形成转动配合。
进一步的,所述的上连接臂与二级摆动轴通过轴孔形成转动配合。
进一步的,所述的二级摆动轴与二级摆臂通过轴孔形成转动配合。
进一步的,所述的旋转按钮与喷涂缸通过轴孔形成转动配合。
进一步的,所述的喷涂缸与喷涂头通过轴孔形成转动配合。
本发明与现有技术相比的有益效果是:(1)通过辅助轮为走行装置提供了稳定性和导向性能,大大提高了机器人走行的稳定性;(2)通过在机器人的头部安装避障传感器,使得机器人在走行和作业的过程中,能够有效的避开障碍物,避免发生危险;(3)通过使用多级摆臂作为调整装置,实现各个方向的角度调整,使得斑马线的喷涂工作能够有效的进行,大大提高了工作效率;(3)本发明自动化程度高,工作质量高,节省了人力物力。
附图说明
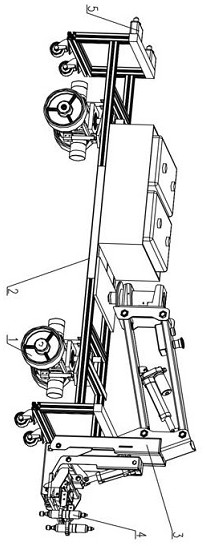
图1为本发明整体示意图。
图2为本发明走行装置示意图。
图3为本发明走行小车示意图。
图4为本发明调整装置示意图。
图5为本发明涂设装置示意图。
图中:1-走行装置;2-走行小车;3-调整装置;4-涂设装置;5-避障传感器;101-走行轮;102-减速器;103-电动马达;104-马达座;105-下部插销;106-下部U型槽;107-转向杆;108-上部插销;109-上部U型槽;110-转向连接板;111-转向轴;112-转向轴承;113-转向轴承座;114-转向座;115-辅助轮安装座;116-辅助轮连接体;117-辅助轮连接板;118-辅助轮安装轴;119-辅助轮;201-下端梁;202-立柱;203-上端梁;204-边梁;205-横隔梁;206-蓄电池箱;207-蓄电池;301-调整装置座;302-回转轴;303-挡圈;304-三角板;305-耳板;306-顶罩;307-一级摆动轴;308-指示灯;309-按钮开关;310-电气柜;311-下连接臂;312-电动推杆座;313-上连接臂;314-电机;315-电动推杆;316-电动推杆连接座;317-二级摆动轴;318-二级摆臂;319-三级摆臂;320-执行臂;321-调整油缸;322-调整油缸座;323-调整轴;324-调整槽;325-横杆;326-定位挡板;327-托板;328-底部轴;401-涂设底座;402-侧板;403-调整阀;404-止挡;405-接收头;406-调整螺母;407-启动器;408-连接座;409-连接底座;410-过度阀;411-过度器;412-过度器底座;413-旋转按钮;414-喷涂缸;415-喷涂头。
具体实施方式
结合具体实施例对本发明作进一步描述,在此发明的示意性实施例以及说明用来解释本发明,但并不作为对本发明的限定。
实施例:如图1、图2、图3、图4、图5所示的一种斑马线自动涂设机器人。
一种斑马线自动涂设机器人的具体结构如图1所示,其中走行装置1固定安装在走行小车2上,走行小车2是整个装置的支撑安装架,调整装置3固定安装在走行小车2上,涂设装置4固定安装在调整装置3上,避障传感器5固定安装在走行小车2上。通过在机器人的头部安装避障传感器5,使得机器人在走行和作业的过程中,能够有效的避开障碍物,避免发生危险。
走行装置1的具体结构如图2所示,其中走行轮101转动安装在减速器102上,减速器102固定安装在马达座104上,电动马达103固定安装在马达座104上,马达座104固定安装在转向座114上,下部插销105转动安装在下部U型槽106上,转向杆107转动安装在下部插销105上,上部插销108转动安装在转向杆107上,上部U型槽109固定安装在转向连接板110上,转向连接板110固定安装在横隔梁205上,转向轴111转动安装在转向轴承112上,转向轴承112固定安装在转向轴承座113上,转向轴承座113固定安装在转向座114上,辅助轮安装座115固定安装在下端梁201上,辅助轮连接体116转动安装在辅助轮安装座115上,辅助轮连接板117固定安装在辅助轮连接体116上,辅助轮安装轴118转动安装在辅助轮连接板117上,辅助轮119转动安装在辅助轮安装轴118上。辅助轮119为走行装置1提供了稳定性和导向性能,大大提高了机器人走行的稳定性,
走行小车2的具体结构如图2所示,其中下端梁201固定安装在辅助轮安装座115上,立柱202固定安装在下端梁201上,上端梁203固定安装在立柱202上,边梁204固定安装在立柱202之间,横隔梁205固定安装在边梁204之,蓄电池箱206固定安装在边梁204上,蓄电池207固定安装在蓄电池箱206内。蓄电池207为走行小车2提供了动力源,使得机器人能够顺利的完成喷涂作业。
调整装置3的具体结构如图2所示,其中调整装置座301固定安装在边梁204上,回转轴302转动安装在调整装置座301上,挡圈303转动安装在回转轴302上,三角板304转动安装在回转轴302上,耳板305固定安装在三角板304上,顶罩306转动安装在回转轴302的顶部,一级摆动轴307转动安装在耳板305上,指示灯308固定安装在电气柜310上,按钮开关309固定安装在电气柜310上,电气柜310固定安装在上连接臂313上,下连接臂311转动安装在一级摆动轴307上,电动推杆座312固定安装在下连接臂311上,上连接臂313转动安装在一级摆动轴307和二级摆动轴317上,电机314固定安装在电动推杆315上,电动推杆315的一端转动安装在电动推杆座312上,另一端转动安装在电动推杆连接座316上,电动推杆连接座316固定安装在二级摆臂318上,二级摆动轴317转动安装在二级摆臂318上,三级摆臂319固定安装在二级摆臂318上,执行臂320固定安装在托板327上,调整油缸321转动安装在执行臂320和调整油缸座322上,调整油缸座322固定安装在执行臂320上,调整轴323转动安装在调整槽324上,调整槽324固定安装在横杆325上,横杆325固定安装在定位挡板326之间,两个定位挡板326固定安装在横杆325的两端,托板327转动安装在底部轴328上,底部轴328转动安装在三级摆臂319上。其中上连接臂313和下连接臂311作为一级摆臂,通过电动推杆315可以调整一级摆臂和二级摆臂318之间的角度,通过调整油缸322可以调整三级摆臂和318和执行臂320之间的角度。
涂设装置4的具体结构如图2所示,其中涂设底座401固定安装在托板327上,侧板402固定安装在涂设底座401上,调整阀403固定安装在侧板402上,止挡404固定安装在侧板402上,接收头405转动安装在启动器407上,调整螺母406转动安装在接收头405上,启动器407固定安装在涂设底座401上,连接座408固定安装在连接底座409上,过度阀410转动安装在过度器411上,过度器底座412固定安装在涂设底座401上,旋转按钮413转动安装在喷涂缸414上,喷涂缸414转动安装在连接座408上,喷涂头415转动安装在喷涂缸414上。调整阀403可以调整喷涂的速率和喷涂量,过度阀410可以调整喷涂的压力。
使用本发明时,通过走行装置1为整个走行小车提供走行动力,其中走行装置1中包括走行轮101和辅助轮119,辅助轮119可以起到导向和稳定的作用,保证机器人在马路上工作时不会发生侧滚和倾覆。走行小车2为整个装置提供了安装空间和安装位置,调整装置3和涂设装置4均安装在走行小车2上。调整装置3是通过回转轴302安装在走行小车2上,可以进行整体的回转调整,并且以摆动臂为连接机构,加以电动推杆315和调整油缸322的角度调整,使得喷涂工作顺利进行。通过涂设装置4可以将油漆安装指定的路径喷涂在马路上形成斑马线。由于在喷涂过程中考虑到周围复杂的路况,所以在机器人上安装了两个避障传感器5,保障了安全性。
- 一种斑马线自动涂设机器人
- 一种用于平曲面自动涂刮胶工业机器人末端工具