一种基于连杆驱动弯度可变的变形机翼
文献发布时间:2023-06-19 10:21:15
技术领域
本发明属于航天航空设备技术领域,涉及机翼结构,具体涉及一种基于连杆驱动弯度可变的变形机翼。
背景技术
机翼是决定飞机整体空气动力的关键部件,其外形对于飞机的综合性能有着重要影响。在不同的飞行环境和飞行任务下,根据实际情况改变机翼的自身气动外形能够改变飞机的升阻比、起降距离、油耗、航程、机动性和隐身性等性能参数,从而使飞机在飞行过程中保持总体性能最优。
由于变形机翼具有种种优势,从上个世纪开始,国外就开展了大量的研究工作。从第二次世界大战结束后,美国就研制了一系列可变后掠翼飞机,例如X5(1951-1958),F111(1964-2010),F-14(1970-2006)。近年来,美国在国防部高级研究计划局(DARPA)的“可变形飞行器结构(MAS)”极化和“智能翼”的资助下,继续研制了可变后掠机翼以及变弯度机翼。此外,国外多所大学和公司也开展了多个种类的变形机翼研究工作,包含折叠机翼、变后掠机翼、变展长机翼、变弯度机翼、变弦长机翼、变厚度机翼以及变翼尖机翼等。中国虽在变形机翼方面的研究工作起步相较于国外较晚,但也有高效和研究所也开展了相应的研究工作,例如哈尔滨工业大学,西北工业大学,南京航空航天大学,北京航空航天大学,中国航空工业集团公司沈阳飞机设计研究所等。
对于变弯度机翼,机翼飞行过程中弯度变化将带来升力、阻力的变化,根据飞行阶段的不同改变机翼弯度将有利于提高机翼飞行效率,到达增升减阻的目的。目前,用于机翼弯度变形的机构较多,但是各有优劣,在变形范围、机构重量、机构效率等方面难以到达尽善尽美,尤其存在机翼大范围弯度变形难、驱动机构效率低的问题。
发明内容
针对现有技术中机翼大范围弯度变形难、驱动机构效率低等问题,本发明的目的是提供一种基于连杆驱动弯度可变的变形机翼,该变形机翼利用基于曲柄滑块机构原理的连杆驱动组件,能够在直线运动驱动下实现机翼机构指关节式的弯度变形。
为实现上述发明目的,本发明采用的技术方案如下:
一种基于连杆驱动弯度可变的变形机翼,包括机翼本体、连杆驱动组件以及转轴连接组件,所述机翼本体包括机翼模块Ⅰ、机翼模块Ⅱ、机翼模块Ⅲ以及机翼模块Ⅳ,所述机翼模块Ⅰ为固定段;所述连杆驱动组件设置于机翼本体内部,包括滑块、驱动连杆、第一连杆、第二连杆;转轴连接组件包括第一转轴、第二转轴、第三转轴;
所述机翼模块Ⅱ与机翼模块Ⅰ通过第一转轴铰接,机翼模块Ⅲ与机翼模块Ⅱ通过第二转轴铰接,机翼模块Ⅳ与机翼模块Ⅲ通过第三转轴铰接,
所述滑块安装于机翼模块Ⅰ上,并与机翼模块Ⅰ滑动连接;驱动连杆的一端端部与滑块铰接,其另一端端部与第二转轴铰接;第一连杆的一端端部铰接于机翼模块Ⅰ,其另一端端部铰接于机翼模块Ⅲ;第二连杆的一端端部铰接于机翼模块Ⅱ,其另一端端部铰接于机翼模块Ⅳ;
当滑块在外力作用下相对于机翼模块Ⅰ做沿水平方向上的直线运动时,在连杆驱动组件的作用下,机翼模块Ⅱ、机翼模块Ⅲ以及机翼模块Ⅳ分别绕第一转轴、第二转轴、第三转轴转动一定角度,机翼本体形成指关节式运动的弯度变形。
上述基于连杆驱动弯度可变的变形机翼,所述第一连杆与第二连杆形成交叉结构可进一步确保机翼模块Ⅱ、机翼模块Ⅲ以及机翼模块Ⅳ分别绕第一转轴、第二转轴、第三转轴转动的方向一致,机翼结构仅发生弯度变形,翼型不会发生大的突变。进一步优选地,所述驱动连杆与第一连杆形成交叉结构。
具体地,所述滑块与机翼模块Ⅰ的连接位置位于机翼模块Ⅰ后半段且于机翼模块Ⅰ横轴中心线上方,驱动连杆与机翼模块Ⅱ的连接位置(即第二转轴所在位置)位于机翼模块Ⅱ后端且于机翼模块Ⅲ横轴中心线下方;第一连杆与机翼模块Ⅰ的连接位置位于机翼模块Ⅰ后端且于机翼模块Ⅰ横轴中心线下方,第一连杆与机翼模块Ⅲ的连接位置位于机翼模块Ⅲ前端且于机翼模块Ⅲ横轴中心线上方;第二连杆与机翼模块Ⅱ的连接位置位于机翼模块Ⅱ中间位置且于机翼模块Ⅱ横轴中心线下方,第二连杆与机翼模块Ⅳ的连接位置位于机翼模块Ⅳ前端且于机翼模块Ⅳ横轴中心线下方。
与现有技术相比,本发明提供的技术方案产生了以下有益的技术效果:
1.本发明提供的基于连杆驱动弯度可变的变形机翼包括机翼本体、连杆驱动组件以及转轴连接组件,机翼本体由多段机翼模块组成,机翼模块之间一次通过转轴连接组件转动连接,连杆驱动组件将各机翼模块进行有机结合,使各机翼模块能在直线运动驱动下形成指关节式的弯度变形,采用的连杆驱动组件驱动效率高,可实现机翼大范围弯度变形。
2.本发明提供的基于连杆驱动弯度可变的变形机翼,连杆驱动组件综合运用了曲柄滑块机构原理和交叉连杆结构,从而使一个直线运动驱动三段机翼结构分别绕三个转轴旋转的弯度变形运动,能够达到以较小的位移驱动机翼结构发生较大的弯度变形,符合机翼变形机构结构紧凑、驱动元件少的特点。
3.本发明提供的基于连杆驱动弯度可变的变形机翼,结构设计合理,原理简单可靠,可有效提高驱动变形效率,实用性强,值得推广应用于机翼弯度变形的机构设计中。
附图说明
为了更清楚地说明本发明实施例或现有技术中的技术方案,以下将对实施例或现有技术描述中所需要使用的附图作简单的介绍,显而易见地,以下描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员而言,在不付出创造性劳动的前提下,还可以根据这些附图所示实施例得到其它的实施例及其附图。
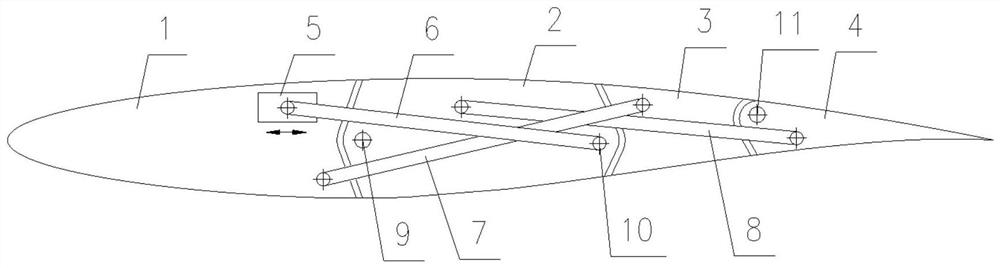
图1为本发明基于连杆驱动弯度可变的变形机翼结构示意图,箭头表示滑块相对于机翼模块Ⅰ的运动方向。
图2为本发明基于连杆驱动弯度可变的变形机翼工作原理示意图。
附图标记说明:1、机翼模块Ⅰ;2、机翼模块Ⅱ;3、机翼模块Ⅲ;4、机翼模块Ⅳ;5、滑块;6、驱动连杆;7、第一连杆;8、第二连杆;9、第一转轴;10、第二转轴;11、第三转轴。
具体实施方式
以下将结合附图对本发明各实施例的技术方案进行清楚、完整的描述,显然,所描述实施例仅仅是本发明的一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动的前提下所得到的所有其它实施例,都属于本发明所保护的范围。
本实施例中,一种基于连杆驱动弯度可变的变形机翼如图1所示,包括机翼本体、连杆驱动组件以及转轴连接组件。
机翼本体包括机翼模块Ⅰ1、机翼模块Ⅱ2、机翼模块Ⅲ3以及机翼模块Ⅳ4,机翼模块Ⅰ1为固定段。
连杆驱动组件设置于机翼本体内部,包括滑块5、驱动连杆6、第一连杆7、第二连杆8;转轴连接组件包括第一转轴9、第二转轴10、第三转轴11。
机翼模块Ⅱ2与机翼模块Ⅰ1通过第一转轴9铰接,机翼模块Ⅱ2与机翼模块Ⅰ1的铰接位置位于机翼模块Ⅰ和机翼模块Ⅱ2横轴中心线上;机翼模块Ⅲ3与机翼模块Ⅱ2通过第二转轴10铰接,机翼模块Ⅱ2与机翼模块Ⅲ3的铰接位置位于机翼模块Ⅲ3和机翼模块Ⅱ2横轴中心线的下方;机翼模块Ⅳ4与机翼模块Ⅲ3通过第三转轴11铰接,机翼模块Ⅳ4与机翼模块Ⅲ3的铰接位置位于机翼模块Ⅲ3和机翼模块Ⅳ4横轴中心线的上方。
滑块5安装于机翼模块Ⅰ1上,并与机翼模块Ⅰ1滑动连接,滑块5与机翼模块Ⅰ1的连接位置位于机翼模块Ⅰ1后半段且于机翼模块Ⅰ1横轴中心线上方。驱动连杆6的一端端部与滑块5铰接,其另一端端部与第二转轴10铰接。第一连杆7的一端端部铰接于机翼模块Ⅰ1,其另一端端部铰接于机翼模块Ⅲ3;第一连杆7与机翼模块Ⅰ1的连接位置位于机翼模块Ⅰ1后端且于机翼模块Ⅰ1横轴中心线下方,第一连杆7与机翼模块Ⅲ3的连接位置位于机翼模块Ⅲ3前端且于机翼模块Ⅲ3横轴中心线上方。第二连杆8的一端端部铰接于机翼模块Ⅱ2,其另一端端部铰接于机翼模块Ⅳ4;第二连杆8与机翼模块Ⅱ2的连接位置位于机翼模块Ⅱ2中间位置且于机翼模块Ⅱ2横轴中心线之下,第二连杆8与机翼模块Ⅳ4的连接位置位于机翼模块Ⅳ4前端且于机翼模块Ⅳ4横轴中心线之下。由此,第一连杆与第二连杆形成交叉结构,驱动连杆与第一连杆形成交叉结构。
如图2所示,当滑块5在外力作用下相对于机翼模块Ⅰ1做沿水平方向上的直线运动时,在连杆驱动组件的作用下,机翼模块Ⅱ2、机翼模块Ⅲ3以及机翼模块Ⅳ4分别绕第一转轴9、第二转轴10、第三转轴11转动一定角度,机翼本体形成指关节式运动的弯度变形。
综上所述,本实施例提供的基于连杆驱动弯度可变的变形机翼,其连杆驱动组件作为机翼结构弯度变形的驱动机构,实现了机翼模型大范围弯度变形的设计需求,在滑块直线驱动位移5mm的情况下机翼整体弯度变形可达到15%,达到了通过位移驱动实现大范围变形的目的,符合机翼模型变形机构结构紧凑、利用率高的特点,较好解决了机翼模型变形机构设计所面临的问题。
- 一种基于连杆驱动弯度可变的变形机翼
- 一种基于形状记忆合金驱动的可变弯度机翼结构