机器人的故障诊断装置及其机器人系统
文献发布时间:2023-06-19 10:21:15
技术领域
本发明涉及机器人的故障诊断装置及机器人系统,尤其涉及适合于工业用机器人,且用于对发出与该机器人的动作状态相应的颜色的光的发光部的故障进行诊断的机器人的故障诊断装置及其机器人系统。
背景技术
以往,例如专利文献1中公开的那样,存在具备发出与动作状态等相应的颜色的光的发光部的机器人。根据这种结构,作业人员能够根据由发光部发出的光的颜色,掌握机器人的动作状态等。作为这种发光部,可列举如下结构:具备与作为光的三原色的红色、绿色以及蓝色相对应的三个发光二极管,通过这些各发光二极管被个别地通电来发出与机器人的状态相应的颜色的光。此外,在本说明书中,有时将发光二极管称为LED。
现有技术文献
专利文献
专利文献1:日本特开2016-43438号公报
发明内容
本发明所要解决的技术问题
在上述结构中,当在构成发光部的各LED、用于驱动这些LED的结构等中发生故障时,发光部有可能发出与机器人的状态所对应的颜色不同的颜色的光,这样,有可能导致使用机器人实施规定的作业的作业人员的安全性降低。例如,即使机器人的状态为自动模式,在发光部的发光颜色为表示直接示教模式的颜色的情况下,发生如下的问题。此外,自动模式是机器人按照预先准备的程序自动地执行规定的动作的状态,直接示教模式是作业人员能够手动地使机器人的机械臂动作以进行示教的状态。
即,如果发光部的发光颜色为表示直接示教模式的颜色,则作业人员将误认为机器人处于直接示教模式。因此,作业人员为了示教而靠近机器人并试图接触机械臂。然而,此时机器人为自动地进行规定的动作的状态,因此有可能导致机械臂等接触到靠近机器人的作业人员。
本发明是鉴于上述情况而作出的,其目的在于提供一种能够高精度地检测表示机器人的动作状态的发光部的故障的机器人的故障诊断装置。
用于解决技术问题的技术方案
第一技术方案所记载的机器人的故障诊断装置是诊断发光部的故障的装置,该发光部通过发光颜色不同的多种发光二极管被个别地通电并点亮,从而发出与机器人的动作状态相应的颜色的光。故障诊断装置具备:通电控制部,控制对发光二极管的通电;电压检测部,检测根据发光二极管的端子电压而变化的诊断电压;以及故障检测部。
发光二极管的端子电压根据对该发光二极管的通电状态而变化。因此,上述诊断电压根据对多个发光二极管各自的通电状态而变化。即,在上述结构中,诊断电压为每个对多个发光二极管的通电状态所特有的电压值。而且,在上述结构中,对多个发光二极管的通电状态在发光二极管以及用于驱动发光二极管的结构中未发生故障的正常时,与基于通电控制部的通电的控制状况一致,但是在发光二极管以及用于驱动发光二极管的结构中发生故障的异常时,与基于通电控制部的通电的控制状况不一致。
因此,在上述结构中,在正常时,诊断电压为和能够根据基于通电控制部的通电的控制状况推测的、与对多个发光二极管的通电状态相对应的电压值大致相同的电压值,另一方面,在异常时,诊断电压为与上述通电状态所对应的电压值不同的电压值。考虑到这些点,故障检测部根据基于通电控制部的通电的控制状况与基于电压检测部的诊断电压的检测值,检测发光部的故障。根据这种结构,能够高精度地检测发光部的故障。
一般而言,发光二极管的端子电压在发光二极管为未被通电的状态的情况下大致为零,在发光二极管为被通电的状态的情况下为与正向电压相应的电压值。另外,发光二极管的正向电压为对于其每个发光颜色彼此不同的电压值。因此,上述结构的故障检测部还考虑这种正向电压的不同,从而还能够确定在多种发光二极管以及用于驱动这些发光二极管的结构的哪个中发生了故障。
在第一技术方案所记载的结构中,能够采用如下方法:即,在全部的发光二极管均为非通电(非点亮)的状态下,对任意的发光二极管进行通电(点亮)以进行发光部的故障诊断。然而,在这种方法中,从发光部为无发光的状态突然变成发光部发出与机器人的动作状态无关的颜色的光。在这种情况下,由于发光部从无发光的状态转移至发光的状态,因此使用机器人的用户(作业人员)容易识别这种变化。因此,作业人员会注意到发光部在自身预想以外的时机突然发光,有可能会感到不安。
因此,在第二技术方案所记载的机器人的故障诊断装置中,通电控制部在机器人的动作状态为仅发光部的一个发光二极管被通电的状态的期间,进行对其他一个发光二极管的通电。而且,第二技术方案所记载的故障检测部根据如上述那样由通电控制部进行对其他一个发光二极管的通电的期间中的诊断电压的检测值,检测发光部的故障。
这样,发光部不会从无发光的状态突然转移至发光的状态。而且,在这种情况下,发光部的发光颜色仅是从基于原先被通电的一个发光二极管的发光颜色变化到相对于该发光颜色混合了基于其他一个发光二极管的发光颜色的混合颜色,这种变化难以被作业人员识别。因此,根据上述结构,能够进行发光部的诊断,而不会使作业人员感到不安。
另外,在第三技术方案所记载的机器人的故障诊断装置中,通电控制部在机器人的动作状态为仅发光部的一个发光二极管被通电的状态的期间,进行对其他多个发光二极管的通电。而且,第三技术方案所记载的故障检测部根据如上述那样由通电控制部进行对其他多个发光二极管的通电的期间中的诊断电压的检测值,检测发光部的故障。
这样,发光部不会从无发光的状态突然转移至发光的状态。而且,在这种情况下,发光部的发光颜色仅是从基于原先被通电的一个发光二极管的发光颜色变化到相对于该发光颜色混合了基于其他多个发光二极管的发光颜色的混合颜色,这种变化难以被作业人员识别。因此,根据上述结构,能够进行发光部的诊断,而不会使作业人员感到不安。
在第四技术方案所记载的机器人的故障诊断装置中,通电控制部在进行对其他发光二极管的通电时,以使该发光二极管的亮度比稳定时低的方式控制通电。这样,能够将从基于原先被通电的一个发光二极管的发光颜色变化到混合颜色时的颜色的变化程度抑制得较小,这种变化更加难以被作业人员识别。因此,根据上述结构,能够在将作业人员感到不安的可能性进一步抑制得较低的同时,进行发光部的诊断。
在第五技术方案所记载的机器人的故障诊断装置中,进一步具备通知部,当由故障检测部检测出发光部的故障时,所述通知部通过与发光二极管的点亮不同的方法来通知在发光部发生了故障。在检测出发光部的故障时,不是可正常地进行发光二极管的点亮的状态的可能性较高,因此在通过发光二极管的点亮来通知在发光部发生了故障的方法中,有可能无法实现可靠的通知。根据上述结构,通过与发光二极管的点亮不同的方法来通知在发光部发生了故障,因此能够实现可靠的通知。
在第六技术方案所记载的机器人的故障诊断装置中,通电控制部被构成为,即使不管机器人的状态而进行对发光二极管的通电,也能够控制成不使使用机器人的用户的安全性大幅受损。根据这种结构,即使在通电控制部为了发光部的故障诊断而以与通常不同的方式进行了对发光二极管的通电的情况下,也不会在用户的安全性上产生问题。
在第七技术方案所记载的机器人的故障诊断装置中,在通电控制部不管机器人的状态而进行对发光二极管的通电的情况下,多种发光二极管的各发光颜色为使用机器人的用户难以误认机器人的状态的颜色。这样,即使在通电控制部为了发光部的故障诊断而以与通常不同的方式进行了对发光二极管的通电的情况下,用户也不会由于发光部的发光颜色而误认机器人的状态,因此,不会不小心靠近机器人,不会在安全性上产生问题。
在第八技术方案所记载的机器人的故障诊断装置中,将具备作为与光的三原色相对应的三个发光二极管的红色发光二极管、绿色发光二极管以及蓝色发光二极管的发光部作为诊断的对象。在机器人的状态为自动地执行预先确定的规定的动作的第一状态时,进行对红色发光二极管、绿色发光二极管以及蓝色发光二极管的通电,从而发光部发出白色的光。在机器人的状态为发生了重要度比较高的错误的第二状态时,进行对红色发光二极管的通电,从而发光部发出红色的光。
在机器人的动作状态为发生了重要度比较低的错误的第三状态时,进行对红色发光二极管以及绿色发光二极管的通电,从而发光部发出黄色的光。在机器人的状态为进行初始化的初始化中的第四状态时,进行对绿色发光二极管的通电,从而发光部发出绿色的光。在机器人的状态为使用机器人的用户能够手动地使机器人动作以进行示教的直接示教模式即第五状态时,进行对蓝色发光二极管的通电,从而发光部发出蓝色的光。
通过将这样的发光部作为故障诊断的对象,可获得如下的效果。即,在这种情况下,仅一个发光二极管被通电的机器人的动作状态为第二状态、第四状态以及第五状态。根据上述结构,在这种状态时,即使为了诊断故障而进行了对其他一个发光二极管的通电,也能够消除作业人员安全性降低的担忧。以下,对其理由进行说明。
首先,在机器人为第二状态时,即使进行了对蓝色发光二极管的通电,发光部的发光颜色也变成作为红色与蓝色的混合颜色的洋红色,不会变成表示机器人的其他状态的颜色,因此作业人员不会误认机器人的状态而不小心靠近,能够消除安全性降低的担忧。另外,在机器人为第二状态时,即使进行了对绿色发光二极管的通电,发光部的发光颜色也变成作为红色与绿色的混合颜色的黄色。在这种情况下,黄色与第三状态相对应,与原先的发光颜色即红色同样地,是表示机器人的状态为错误的颜色。因此,作业人员即使注意到发光颜色从红色变化为黄色,对于机器人的状态为错误的认识也不会变化,不会不小心靠近机器人,能够避免安全性降低的担忧。
在机器人为第四状态时,即使进行了对红色发光二极管的通电,发光部的发光颜色也变成作为绿色与红色的混合颜色的黄色。如上所述,黄色是表示机器人的状态为错误的颜色。因此,作业人员即使注意到发光颜色从绿色变化为黄色,也识别为机器人的状态从初始化中变化为错误,不会不小心靠近机器人,能够消除安全性降低的担忧。另外,在机器人为第四状态时,即使进行了对蓝色发光二极管的通电,发光部的发光颜色也变成作为绿色与蓝色的混合颜色的青色,不会变成表示机器人的其他状态的颜色,因此作业人员不会误认机器人的状态而不小心靠近,能够消除安全性降低的担忧。
在机器人为第五状态时,即使进行了对红色发光二极管的通电,发光部的发光颜色也变成作为蓝色与红色的混色颜色的洋红色,不会变成表示机器人的其他状态的颜色,因此作业人员不会误认机器人的状态而不小心靠近,能够消除安全性降低的担忧。另外,在机器人为第五状态时,即使进行了对绿色发光二极管的通电,发光部的发光颜色也变成作为蓝色与绿色的混合颜色的青色,不会变成表示机器人的其他状态的颜色,因此作业人员不会误认机器人的状态而不小心靠近,能够消除安全性降低的担忧。
另外,根据上述结构,即使在仅一个发光二极管被通电的状态时为了诊断故障而进行了对其他两个发光二极管的通电的情况下,或者,在两个发光二极管被通电的机器人的状态(第三状态)时进行了用于诊断故障的对其他一个发光二极管的通电的情况下,也能够消除作业人员安全性降低的担忧。这是因为,在这些情况下,发光部的发光颜色均为白色,白色是表示机器人自动地执行规定的动作的第一状态的颜色。因此,即使作业人员注意到发光颜色从原先的颜色变化为白色,也识别为机器人的状态从原先的颜色所表示的状态变化为第一状态,不会不小心靠近机器人,能够消除安全性降低的担忧。
附图说明
图1是示意性地示出第一实施方式的机器人系统的结构的图。
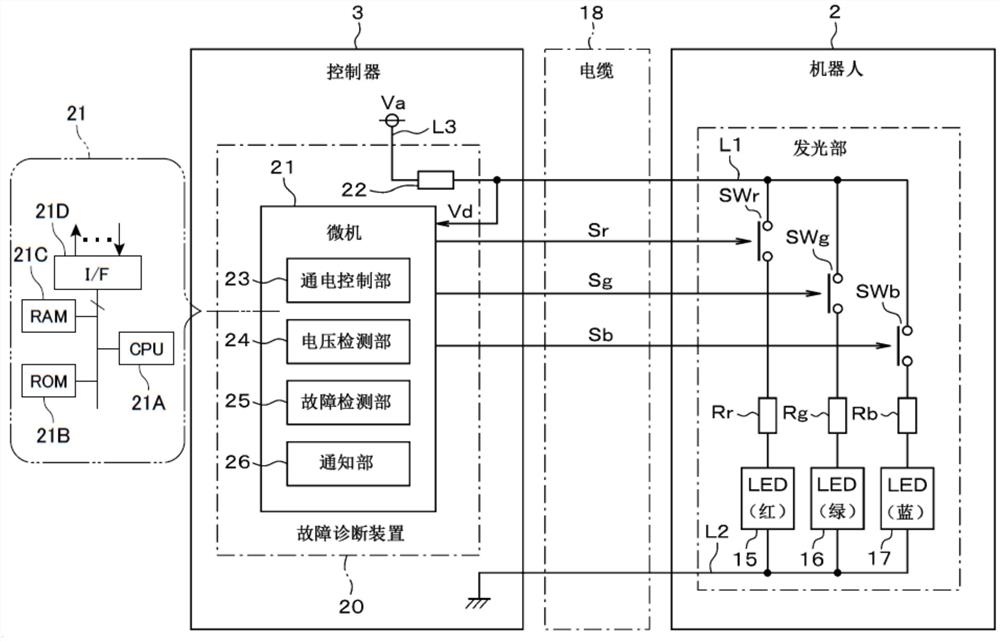
图2是示意性地示出第一实施方式的机器人系统的电气结构的图。
图3是示意性地示出第一实施方式的第一诊断方法中的处理内容的图。
图4是示意性地示出第一实施方式的机器人的状态为第二状态时的各部的信号的时序图。
图5是示意性地示出第一实施方式的第二诊断方法中的处理内容的图。
图6是示意性地示出第一实施方式的第三诊断方法中的处理内容的图。
图7是示意性地示出第一实施方式的故障部位确定处理的内容的图。
图8是示意性地示出第二实施方式的发光部的结构的图。
附图标记说明
2:机器人
14、31:发光部
15:红色发光二极管
16:绿色发光二极管
17:蓝色发光二极管
20:故障诊断装置
23:通电控制部
24:电压检测部
25:故障检测部
26:通知部
具体实施方式
以下,参照附图,对多个实施方式进行说明。此外,对各实施方式中实质上相同的结构附上相同的附图标记并省略说明。
(第一实施方式)
以下,参照图1~图7,对第一实施方式进行说明。
如图1所示,机器人系统1具备垂直多关节型的机器人2,并在基座4的内部具备控制机器人2的动作的控制器3。此外,在图1中,控制器3被描绘成矩形箱状,但实际上呈与基座4的形状相匹配的形状。机器人系统1被用于一般的工业用途。机器人2是所谓的六轴的垂直多关节型机器人。
在基座4上,通过具有z方向的轴心的第一轴,以在水平方向上可旋转的方式连接有轴肩5。在轴肩5,具备具有y方向的轴心的第二轴,并通过向y方向延伸的第二偏移机械臂6,以在垂直方向上可旋转的方式连接有向上方延伸的第一机械臂7的下端部。在第一机械臂7的顶端部,具备具有y方向的轴心的第三轴,并通过向-y方向延伸的第三偏移机械臂8,以在垂直方向上可旋转的方式连接有第二机械臂9。第二机械臂9包括基部9a以及顶端部9b。
第二机械臂9具备具有x方向的轴心的第四轴,顶端部9b相对于基部9a以可扭动旋转的方式连接。在第二机械臂9的顶端部,具备具有y方向的轴心的第五轴,并通过向-y方向延伸的第五偏移机械臂10,以在垂直方向上可旋转的方式连接有手腕11。在手腕11,通过具有x方向的轴心的第六轴,以可扭动旋转的方式连接有未图示的凸缘以及机械手12。在设置于机器人2的各轴分别相对应地设置有作为驱动源的未图示的电机。
控制器3是机器人2的控制装置,通过在由包括下述的CPU、ROM以及RAM等的计算机构成的控制单元中执行计算机程序,控制机器人2。具体而言,控制器3具备包括逆变电路等的驱动部,根据由与各电机相对应地设置的编码器检测的电机的旋转位置,例如通过反馈控制来驱动各个电机。
控制器3通过执行预先设定的动作程序控制机器人2,以使机器人2的各机械臂自动地执行预先确定的规定的动作。以下,将这种动作模式称为自动模式。另外,控制器3与用户手动地使机器人2动作以示教机器人2的机械臂顶端的位置姿势的直接示教相对应。以下,将用于进行这种直接示教的动作模式称为直接示教模式。
在机器人2的基座4的圆柱状的部位,设置有由具有透明性的树脂材料形成为圆环状的窗部13。另外,如图2所示,在机器人2中设置有发出与机器人2的动作状态相应的颜色的光的发光部14。从发光部14发出的光经由(透过)窗部13向外部放出。发光部14通过发光颜色不同的多种发光二极管被个别地通电并点亮,从而发出与机器人2的动作状态相应的颜色的光。
在本实施方式中,发光部14具备作为与光的三原色相对应的三个发光二极管的红色发光二极管15、绿色发光二极管16以及蓝色发光二极管17。以下,也将红色发光二极管15、绿色发光二极管16以及蓝色发光二极管17分别称为R-LED15、G-LED16以及B-LED17,并且也简称为LED15、LED16以及LED17。在这种情况下,LED15~17被配置成,各自之间的距离为接近作为发光部14能够发出合成了光的三原色的合成颜色的程度的距离。
在这种情况下,机器人2的动作状态包括第一状态、第二状态、第三状态、第四状态以及第五状态。第一状态是机器人2自动地执行预先确定的规定的动作的状态,也就是处于上述的自动模式的状态。第二状态是在机器人2中发生了重要度比较高的错误的状态。重要度比较高的错误表示如在电源系统中发生异常等机器人2无法动作的紧急度高的错误。
第三状态是在机器人2中发生了重要度比较低的错误的状态。重要度比较低的错误表示机器人2的温度与规定值相比上升时,在程序设计中存在问题时等,不切断电源就能够恢复的紧急度低的错误。第四状态是进行初始化的初始化中的状态。初始化在对机器人系统1导通电源时被执行,在该初始化中,机器人2无法动作。第五状态是使用机器人的用户(作业人员)能够手动地使机器人2动作以进行示教的状态,也就是处于上述的直接示教模式的状态。
发光部14与这五个动作状态中的每一个相应地发出预先确定的颜色的光。即,在机器人2为第一状态时,进行对R-LED15、G-LED16以及B-LED17的通电,从而发光部14发出白色的光。在机器人2为第二状态时,进行对R-LED15的通电,从而发光部14发出红色的光。在机器人2为第三状态时,进行对R-LED15以及G-LED16的通电,从而发光部14发出黄色的光。在机器人2为第四状态时,进行对G-LED16的通电,从而发光部14发出绿色的光。在机器人2为第五状态时,进行对B-LED17的通电,从而发光部14发出蓝色的光。
在机器人系统1中,设置有用于对这种发光部14的发光进行控制的结构以及用于检测发光部14的故障的结构。以下,参照图2,对这些结构进行说明。发光部14除了上述的LED15~17之外,还具备开关SWr、SWg、SWb以及电阻Rr、Rg、Rb。开关SWr、SWg、SWb例如由MOSFET等的半导体开关元件构成,通过经由电缆18从控制器3赋予的二值信号即指令信号Sr、Sg、Sb分别控制它们的导通关断。具体而言,开关SWr、SWg、SWb分别在指令信号Sr、Sg、Sb为高电平时被导通,并且在低电平时被关断。
开关SWr的一侧的端子连接到电源线L1,另一侧的端子经由电阻Rr以及R-LED15连接到接地线L2。开关SWg的一侧的端子连接到电源线L1,另一侧的端子经由电阻Rg以及G-LED16连接到接地线L2。开关SWb的一侧的端子连接到电源线L1,另一侧的端子经由电阻Rb以及B-LED17连接到接地线L2。
电源线L1以及接地线L2通过电缆18连接到控制器3,由此,从控制器3向发光部14供给用于驱动LED15~17的电源电压Va。在上述结构中,通过开关SWr被导通,R-LED15被通电并点亮;通过开关SWg被导通,G-LED16被通电并点亮;通过开关SWb被导通,B-LED17被通电并点亮。通过电阻Rr、Rg、Rb来限制这些LED15~17被通电时流过的电流。也就是说,电阻Rr、Rg、Rb作为电流限制用的电阻发挥功能。
控制器3具备控制发光部14的发光并且诊断发光部14的故障的故障诊断装置20。故障诊断装置20具备微型计算机21以及电阻22。在本说明书中,也将微型计算机称为微机。电阻22被设置成串联地介于被赋予电源电压Va的电源线L3、与用于向发光部14供给电源电压Va的电源线L1之间。电阻22的电源线L1侧的端子的电压作为用于诊断发光部14的故障的诊断电压Vd被赋予微机21。
微机21具备通电控制部23、电压检测部24、故障检测部25以及通知部26等的功能块。通过由微机21所具备的CPU21A执行存储在ROM21B等主存储器(发挥非暂时性计算机可读存储介质的功能)中的计算机程序来执行与计算机程序相对应的处理,从而实现这些各功能块,也就是说,通过软件来实现这些各功能块。在微机21中,附图标记21C和21D表示RAM和接口(I/O)。此外,也可以设为通过硬件来实现各功能块中的至少一部分的结构。
通电控制部23控制对发光部14的LED15~LED17的通电,生成指令信号Sr、Sg、Sb。由通电控制部23生成的指令信号Sr、Sg、Sb通过电缆18赋予给发光部14,并且赋予给故障检测部25。通电控制部23还能够将指令信号Sr、Sg、Sb作为脉冲宽度调制信号即PWM信号。这样,通电控制部23通过控制指令信号Sr、Sg、Sb的占空比,能够控制LED15~LED17发光时的亮度。
电压检测部24检测诊断电压Vd,并将该检测值赋予给故障检测部25。故障检测部25根据指令信号Sr、Sg、Sb,掌握基于通电控制部23的对LED15~LED17的通电的控制状况。故障检测部25根据基于通电控制部23的通电的控制状况与诊断电压Vd的检测值,以如下方式检测发光部14的故障。
即,LED15~17的端子电压根据对其的通电状态而变化。因此,上述诊断电压Vd根据对多个LED15~17各自的通电状态而变化。也就是说,在上述结构中,诊断电压Vd为每个对多个LED15~17的通电状态所特有的电压值。具体而言,在全部的LED15~17未被通电时,诊断电压Vd为与电源电压Va相同程度的电压。
而且,在仅LED15~17中的一个LED被通电时,诊断电压Vd为从电源电压Va降低由上述一个LED的端子电压(正向电压)等决定的规定的电压值的电压。另外,在仅LED15~17中的两个LED被通电时,诊断电压Vd为从电源电压Va降低由上述两个LED的各端子电压等决定的规定的电压值的电压。
进一步,在全部的LED15~17被通电时,诊断电压Vd为从电源电压Va降低由全部的LED15~17的各端子电压等决定的规定的电压值的电压。这样,诊断电压Vd根据LED15~17的端子电压而变化。此外,诊断电压Vd为与仅一个LED被通电时相比仅两个LED被通电时更低的电压,与仅两个LED被通电时相比全部的LED被通电时更低的电压。
而且,在上述结构中,当在LED15~17以及用于驱动LED15~17的结构(介于对开关SWr、SWg、SWb、LED15~LED17的通电路径中的配线等)中未发生故障的正常时,对LED15~17的通电状态与基于通电控制部23的通电的控制状况一致,但是,当在它们中至少任意一个中发生了故障的异常时,对LED15~17的通电状态与基于通电控制部23的通电的控制状况不一致。
因此,在上述结构中,在正常时,诊断电压Vd为和能够根据基于通电控制部23的通电的控制状况推测的、与对多个LED15~17的通电状态相对应的电压值(以下,称为期待值)大致相同的电压值,另一方面,在异常时,诊断电压Vd为与期待值不同的电压值。考虑到这些点,故障检测部25根据基于通电控制部23的通电的控制状况与基于电压检测部24的诊断电压Vd的检测值,检测发光部14的故障。
故障检测部25能够检测出的故障模式如下。此外,在以下,将LED15~17统称为LED,并且将开关SWr、SWg、SWb统称为开关。
(a)LED的开路故障
(b)LED的短路故障
(c)介于对LED的通电路径中的配线的断线
(b)开关的开路故障
(e)开关的短路故障
这样,在发光部14的故障模式中不仅包括LED本身的故障,还包括用于驱动LED的结构的故障。上述各故障模式中,(a)、(c)以及(d)均为对LED的通电路径变为开路的故障模式,因此,在以下,将这些故障模式简称为开路故障。
当发生开路故障时,尽管由通电控制部23对开关进行了导通控制,由于电流不流向与该开关相对应的通电路径,因此诊断电源Vd的检测值比期待值高。另外,当发生LED的短路故障时,尽管由通电控制部23对开关进行了导通控制,也不会在该LED中发生电压降低而端子电压几乎变为0V,由此诊断电压Vd的检测值比期待值低。
另外,当发生开关的短路故障时,尽管由通电控制部23对开关进行了关断控制,由于电流流过与该开关相对应的通电路径,因此诊断电压Vd的检测值比期待值低。故障检测部25能够根据这种诊断电压Vd的检测值与期待值的关系,检测发光部14的故障并且确定故障模式。
当由故障检测部25检测出发光部14的故障时,通知部26进行通知处理,该通知处理用于通过与基于LED15~17的点亮不同的方法来向作业人员(用户)通知在发光部14发生了故障。作为这种通知的具体方法,例如可例举发出出错音等的声音、发送出错命令等的命令、切断对机器人2的动力供给以使其紧急停止等。
接下来,对基于上述结构的故障诊断装置20的故障诊断的方法进行说明。
【1】第一诊断方法
第一诊断方法是无论机器人2的动作状态为第一状态至第五状态中的哪个都能够诊断发光部14的故障的方法。另外,第一诊断方法是与通常时相比不会变更对发光部14的LED15~LED17的通电的控制,而诊断发光部14的故障的方法。在这种情况下,故障诊断装置20(具体为CPU21A)每隔规定的周期反复执行由图3中示出的各步骤表示的处理。
首先,在步骤S101中,检测诊断电压Vd。接下来,在步骤S102中,求出与基于当前通电控制部23的通电的控制状况相对应的诊断电压Vd的期待值。之后,在步骤S103中,判断在步骤S101中取得的诊断电压Vd的检测值、与在步骤S102中取得的诊断电压Vd的期待值是否一致。此外,也可以在考虑各种误差的基础上以确保期望的诊断精度等为目的而使期待值具有规定的幅度。在这种情况下,在步骤S103中,判断检测值是否为具有规定的幅度的期待值的范围内的值。
在检测值与期待值一致的情况下,步骤S103中为“是”,本处理结束。在这种情况下,作为故障诊断装置20的故障诊断的结果,获得在发光部14未发生故障的结果。与此相对地,在检测值与期待值不一致的情况时,步骤S103中为“否”,进入步骤S104。在步骤S104中,根据检测值与期待值的关系等确定故障模式以及故障部位。
在上述结构中,在检测值比期待值高的情况下,能够确定为发生了开路故障。在上述结构中,在由通电控制部23对开关进行了导通控制并且检测值比期待值低的情况下,能够确定为发生了LED的短路故障。在上述结构中,在由通电控制部23对开关进行了关断控制并且检测值比期待值低的情况下,能够确定为发生了开关的短路故障。
另外,在上述结构中,通过考虑如下内容,能够更加详细地确定发生故障的部位。即,一般而言,LED的正向电压为对于其每个发光颜色彼此不同的电压值。而且,诊断电压Vd是与LED的正向电压相应的电压值。因此,能够根据检测值与期待值的差分、以及各LED的正向电压,确定发生了与哪个LED相对应的开路故障,或者发生了哪个LED的短路故障。
在执行步骤S104之后,进入步骤S105。在步骤S105中,执行故障发生时处理。故障发生时处理是在发光部14发生故障时进行的处理。在故障发生时处理中包含由通知部26执行的通知处理。即,在故障发生时处理中,例如通过声音、命令发送、紧急停止等基于发光部14的发光以外的方法,对用户通知在发光部14发生了故障。在执行步骤S105之后,本处理结束。
【2】第二诊断方法
第二诊断方法是能够在机器人2的动作状态为第二状态、第四状态或者第五状态时诊断发光部14的故障的方法。另外,第二诊断方法是在与通常时相比稍微变更对发光部14的LED15~LED17的通电的控制的基础上,诊断发光部14的故障的方法。
具体而言,在这种情况下,通电控制部23在机器人2的动作状态为仅发光部14的一个LED被通电的状态的期间,以规定的诊断期间进行对其他一个LED的通电。该诊断期间例如为数毫秒至数百毫秒这样比较短的时间。也就是说,在这种情况下,如图4所示,通电控制部23仅在诊断期间Ta对其他一个LED输出成为高电平的脉冲状的指令信号。
图4示出了机器人2的动作状态为第二状态时的各部的信号。因此,在图4中,与LED16相对应的指令信号Sg以及与LED17相对应的指令信号Sb为仅在诊断期间Ta成为高电平的脉冲状的信号。此外,在图4中,对于指令信号Sr、Sg、Sb,将高电平称为“H”,并且将低电平称为“L”。
另外,在这种情况下,通电控制部23在进行对其他LED的通电时,以使该LED的亮度比稳定时低的方式控制通电。通过如上述那样在将指令信号作为PWM信号的基础上控制其占空比,能够实现基于通电控制部23的LED的亮度的控制。而且,在这种情况下,故障检测部25根据诊断期间Ta中的诊断电压Vd的检测值,检测发光部14的故障。
在这种情况下,故障诊断装置20(CPU21A)每隔规定的周期反复执行如图5所示的内容的处理。首先,在步骤S201中,判断是否为仅对LED15~LED17中的一个LED进行通电的状态(第二状态、第四状态或者第五状态)。在此,在是对LED15~LED17中的两个以上的LED进行通电的状态(第一状态或者第三状态)的情况下,步骤S201中为“否”,本处理结束。也就是说,在第二诊断方法中,在机器人2为第一状态或者第三状态时,不进行发光部14的故障诊断。
与此相对地,在是仅对LED15~LED17中的一个LED进行通电的状态(第二状态、第四状态或者第五状态)的情况下,步骤S201中为“是”,进入步骤S202。此外,在以下的说明中,以仅对LED15进行通电的状态(第二状态)的情况为例对各处理进行说明,但是在仅对LED16或者LED17进行通电的状态(第四状态或者第五状态)下也是同样的处理。
在步骤S202中,检测诊断电压Vd,并作为第一检测值Vd1取得该检测值。接下来,在步骤S203中,执行对未进行通电的两个LED16、17中的一者LED17的通电。步骤S203中对LED17的通电的期间为上述的诊断期间Ta。在步骤S204中,检测对LED17进行通电的诊断期间Ta中的诊断电压Vd,并作为第二检测值Vd2取得该检测值。
在未发生与LED17相对应的开路故障时,如图4中用实线示出的那样,诊断期间Ta中的诊断电压Vd为比其他期间的诊断电压Vd低的电压。另一方面,在发生了与LED17相对应的开路故障时,如图4中用虚线示出的那样,诊断期间Ta中的诊断电压Vd为与其他期间的诊断电压Vd相同程度的电压。因此,在步骤S205中,判断第二检测值Vd2是否比第一检测值Vd1低。在此,在第二检测值Vd2不比第一检测值Vd1低的情况下,也就是在第二检测值Vd2为与第一检测值Vd1相同程度的值的情况下,步骤S205中为“否”,进入步骤S206。
在步骤S206中,确定故障部位。在这种情况下,第二检测值Vd为与第一检测值Vd1相同程度的值,因此能够确定为发生了与LED17相对应的开路故障。在执行步骤S206之后,进入步骤S207。在步骤S207中,执行与上述第一诊断方法中的步骤S105同样的故障发生时处理。在执行步骤S207之后,本处理结束。
另一方面,在第二检测值Vd2比第一检测值Vd1低的情况下,步骤S205中为“是”,进入步骤S208。在步骤S208中,执行对未进行通电的两个LED16、17中的另一者LED16的通电。步骤S208中对LED16的通电的期间为上述的诊断期间Ta。在步骤S209中,检测对LED16进行通电的诊断期间Ta中的诊断电压Vd,并作为第三检测值Vd3取得该检测值。
在未发生与LED16相对应的开路故障时,如图4中用实线示出的那样,诊断期间Ta中的诊断电压Vd为比其他期间的诊断电压Vd低的电压。另一方面,在发生了与LED16相对应的开路故障时,如图4中用虚线示出的那样,诊断期间Ta中的诊断电压Vd为与其他期间的诊断电压Vd相同程度的电压。因此,在步骤S210中,判断第三检测值Vd3是否比第一检测值Vd1低。在此,在第三检测值Vd3不比第一检测值Vd1低的情况下,也就是在第三检测值Vd3为与第一检测值Vd1相同程度的值的情况下,步骤S210中为“否”,进入步骤S206。
在这种情况下,第三检测值Vd为与第一检测值Vd1相同程度的值,因此,在步骤S206中,能够确定为发生了与LED16相对应的开路故障。另一方面,在第三检测值Vd3比第一检测值Vd1低的情况下,步骤S210中为“是”,本处理结束。在这种情况下,作为故障诊断装置20的故障诊断的结果,可获得未在发光部14发生故障的结果。
【3】第三诊断方法
第三诊断方法是能够在机器人2的动作状态为第二状态、第四状态或者第五状态时诊断发光部14的故障的方法。另外,第三诊断方法是在与通常时相比稍微变更对发光部14的LED15~LED17的通电的控制的基础上,诊断发光部14的故障的方法。
具体而言,在这种情况下,通电控制部23在机器人2的状态为仅发光部14的一个LED被通电的状态的期间,以规定的诊断期间进行对其他多个(两个)LED的通电。该诊断期间与第二诊断方法中的诊断期间Ta同样地为比较短的时间。另外,在这种情况下,也与第二诊断方法同样地,通电控制部23在进行对其他LED的通电时,以使该LED的亮度比稳定时低的方式控制通电。而且,在这种情况下,故障检测部25根据诊断期间中的诊断电压Vd的检测值检测发光部14的故障。
在这种情况下,故障诊断装置20(CPU21A)每隔规定的周期反复执行如图6所示的内容的处理。首先,在步骤S301中,判断是否为仅对LED15~LED17中的一个LED进行通电的状态(第二状态、第四状态或者第五状态)。在此,在为对LED15~LED17中的两个以上LED进行通电的状态(第一状态或者第三状态)的情况下,步骤S301中为“否”,本处理结束。也就是说,在第三诊断方法中,在机器人2为第一状态或者第三状态时,不进行发光部14的故障诊断。
与此相对地,在是仅对LED15~LED17中的一个LED进行通电的状态(第二状态、第四状态或者第五状态)的情况下,步骤S301中为“是”,进入步骤S302。此外,在以下的说明中,以仅对LED15进行通电的状态(第二状态)的情况为例对各处理进行说明,但是在仅对LED16或者LED17进行通电的状态(第四状态或者第五状态)下也是同样的处理。
在步骤S302中,检测诊断电压Vd,并作为第一检测值Vd1取得该检测值。接下来,在步骤S303中,执行对未进行通电的两个LED16、17的通电。步骤S303中对LED16、17的通电的期间为上述诊断期间。在步骤S304中,检测对LED16、17进行通电的诊断期间中的诊断电压Vd,并作为第二检测值Vd2取得该检测值。
在未发生与LED16、17两者相对应的开路故障时,诊断期间中的诊断电压Vd为相对于其他期间的诊断电压Vd低两个LED被通电的量的电压。另一方面,在发生了与LED16、17中的一个相对应的开路故障时,诊断期间中的诊断电压Vd为相对于其他期间的诊断电压Vd低一个LED被通电的量的电压。另外,在发生了与LED16、17两者相对应的开路故障时,诊断期间中的诊断电压Vd为与其他期间的诊断电压Vd相同程度的电压。
基于这一点,在步骤S305中,判断从第一检测值Vd1减去第二检测值Vd2得到的值是否大于等于阈值Vt2。阈值Vt2对应于与两个LED被通电相伴的诊断电压Vd的降低量。在此,在从第一检测值Vd1减去第二检测值Vd2得到的值大于等于阈值Vt2的情况下,步骤S305中为“是”,本处理结束。在这种情况下,作为故障诊断装置20的故障诊断的结果,可获得在发光部14未发生故障的结果。
另一方面,在从第一检测值Vd1减去第二检测值Vd2得到的值小于阈值Vt2的情况下,步骤S305中为“否”,进入步骤S306。在步骤S306中,判断从第一检测值Vd1减去第二检测值Vd2得到的值是否大于等于阈值Vt1。阈值Vt1对应于与一个LED被通电相伴的诊断电压Vd的降低量。在此,在从第一检测值Vd1减去第二检测值Vd2得到的值小于阈值Vt1的情况下,步骤S306中为“否”,进入步骤S307。
在步骤S307中,确定故障部位。在这种情况下,可认为第二检测值Vd2为与第一检测值Vd1相同程度的值,因此能够确定为发生了与LED16、17两者相对应的开路故障。在执行步骤S307之后,进入步骤S308。另一方面,在从第一检测值Vd1减去第二检测值Vd2得到的值大于等于阈值Vt1的情况下,步骤S306中为“是”,进入步骤S309。
在这种情况下,虽然能够确定为发生了与LED16、17中的一个相对应的开路故障,但是无法确定发生了与LED16、17中的哪个相对应的开路故障。因此,在步骤S309中,执行用于确定故障部位的故障部位确定处理。故障部位确定处理的具体内容例如如图7所示。
首先,在步骤S401中,执行对其他LED16、17中的一个、例如LED16的通电。步骤S401中对LED16的通电的期间为上述诊断期间。接下来,在步骤S402中,检测对LED16进行通电的诊断期间中的诊断电压Vd,并作为第三检测值Vd3取得该检测值。
在所发生的开路故障与LED17相对应时,未发生与LED16相对应的开路故障,因此该诊断期间中的诊断电压Vd为比其他期间的诊断电压Vd低的电压。另一方面,在所发生的开路故障与LED16相对应时,该诊断期间中的诊断电压Vd为与其他期间的诊断电压Vd相同程度的电压。
因此,在步骤S403中,判断第三检测值Vd3是否比第一检测值Vd1低。在此,在第三检测值Vd3比第一检测值Vd1低的情况下,步骤S403中为“是”,进入步骤S404。在步骤S404中,确定为发生了与其他LED16、17中的另一个LED即LED17相对应的开路故障。
另一方面,在第三检测值Vd3不比第一检测值Vd1低的情况下,也就是在第三检测值Vd3为与第一检测值Vd1相同程度的值的情况下,在步骤S403为“否”,进入步骤S405。在步骤S405中,确定为发生了与其他LED16、17中的一个LED即LED16相对应的开路故障。在执行步骤S404或者S405之后,故障部位确定处理结束,进入步骤S308。在步骤S308中,执行与上述第一诊断方法中的步骤S105等同样的故障发生时处理。在执行步骤S308之后,本处理结束。
如以上说明的那样,根据本实施方式可获得如下的效果。
本实施方式的机器人系统1具备诊断发光部14的故障的故障诊断装置20。故障诊断装置20具备:通电控制部23,控制对LED15~17的通电;电压检测部24,检测根据LED15~17的端子电压而变化的诊断电压Vd;以及故障检测部25。故障检测部25根据基于通电控制部23的通电的控制状况与基于电压检测部24的诊断电压Vd的检测值,检测发光部14的故障。
具体而言,故障检测部25基于能够根据此时的通电的控制状况推测的、与对LED15~17的通电状态相对应的诊断电压Vd的期待值、和诊断电压Vd的检测值是否一致,诊断发光部14的故障。根据这种结构,能够高精度地检测发光部14的故障。另外,故障检测部25还考虑发光颜色彼此不同的LED15~17的正向电压的不同来确定故障部位。这样,还能够确定在LED15~17以及用于驱动这些LED15~17的结构的哪个中发生了故障。
在上述结构的机器人系统1中,还能够采用如下方法:即,在全部的LED15~17均为非通电(非点亮)的状态下,对任意的LED进行通电(点亮)以进行发光部14的故障诊断。然而,在这种方法中,从发光部14为无发光的状态突然变成发光部14发出与机器人2的动作状态无关的颜色的光。在这种情况下,由于发光部14从无发光的状态转移至发光的状态,因此这种变化容易被作业人员(用户)识别。因此,作业人员会注意到发光部14在自身预想以外的时机突然发光,有可能会感到不安。
对此,在本实施方式的第一诊断方法中,与通常时相比不变更对发光部14的LED15~LED17的通电的控制,来诊断发光部14的故障。根据这种第一诊断方法,发光部14的动作与通常时同样,因此能够进行发光部14的诊断,而不会使作业人员感到不安。
另外,在本实施方式的第二诊断方法中,通电控制部23在机器人2的动作状态为仅发光部14的一个LED被通电的状态的期间,以规定的诊断期间Ta进行对其他一个LED的通电。而且,在本实施方式的第三诊断方法中,通电控制部23在机器人2的状态为仅发光部14的一个LED被通电的状态的期间,以规定的诊断期间Ta进行对其他两个LED的通电。而且,在第二、第三诊断方法中,故障检测部25根据诊断期间Ta中的诊断电压Vd的检测值,检测发光部14的故障。
根据这种第二、第三诊断方法,发光部14不会从无发光的状态突然迁移至发光的状态。而且,在这种情况下,发光部14的发光颜色仅是从基于原先被通电的一个LED的发光颜色变化到相对于该发光颜色混合了基于其他LED的发光颜色的混合颜色,这种变化难以被作业人员识别。因此,根据第二、第三诊断方法,也能够进行发光部14的诊断,而不会使作业人员感到不安。
在第一至第三诊断方法中分别存在优点。首先,第一诊断方法与通常时相比无需变更对LED15~17的通电的控制,因此存在发光部14的发光状态完全不会从通常时发生变化就能够实施发光部14的诊断的优点。但是,在第一诊断方法中,在三个LED15~LED17的正向电压的差异较小的情况下,有可能难以确定故障部位。
与此相对地,在第二、第三诊断方法中,进行对与原先被通电的LED不同的LED的通电,根据进行该通电的诊断期间Ta中的诊断电压Vd是否比其他期间的诊断电压Vd低,能够检测是否发生了与其他的LED相关联的故障。因此,根据第二、第三诊断方法,存在以下优点:即,在三个LED15~17的正向电压的差异较小的情况下,也能够确定故障部位。
另外,在第二、第三诊断方法中,通电控制部23在进行对其他LED的通电时,以使该LED的亮度比稳定时低的方式控制通电。这样,能够将从基于原先被通电的一个LED的发光颜色变化到混合颜色时的颜色的变化程度抑制得较小,这种变化更加难以被作业人员识别。因此,根据第二、第三诊断方法,能够在将作业人员感到不安的可能性进一步抑制得较低的同时,进行发光部14的诊断。
第二诊断方法以及第三诊断方法分别独立地成立,但是也可以将它们组合。例如,可以以如下方式组合各诊断方法:即,首先进行基于第三诊断方法的发光部14的故障检测,在由此获得了有可能在发光部14发生了故障的诊断结果的情况下,进行基于第二诊断方法的发光部14的故障检测。或者,可以以如下方式组合各诊断方法:即,首先进行基于第二诊断方法的发光部14的故障检测,在由此获得了有可能在发光部14发生了故障的诊断结果的情况下,进行基于第三诊断方法的发光部14的故障检测。这样,能够检测出如下的故障:对于LED15~18逐一点亮时不产生问题,但是点亮多个时由于过电流等原因不点亮的故障。
在本实施方式的故障诊断装置20中,通电控制部23被构成为,即使不管机器人2的动作状态而进行对LED15~18的通电,也能够控制成确保针对使用机器人2的用户的必要的安全性。根据这种结构,在通电控制部23为了发光部14的故障诊断而以与通常不同的方式进行了对LED15~18的通电的情况下,也能够消除用户安全性降低的担忧。
在本实施方式的故障诊断装置20中,在通电控制部23不管机器人2的动作状态而进行对LED15~18的通电的情况下,LED15~18的各发光颜色也为使用机器人2的用户难以误认机器人2的动作状态的颜色。这样,即使在通电控制部23为了发光部14的故障诊断而以与通常不同的方式进行了对LED15~18的通电的情况下,用户也不会由于发光部14的发光颜色而误认机器人2的动作状态,因此,不会不小心靠近机器人2,能够消除安全性降低的担忧。
更加具体而言,本实施方式的故障诊断装置20将具备作为与光的三原色相对应的三个LED的R-LED15、G-LED16以及B-LED17的发光部14作为诊断的对象。通过如上所述那样进行对LED15~17的通电,发光部14发出与机器人2的动作状态相应的颜色的光。通过将这种发光部14作为故障诊断的对象,可获得如下的效果。
即,在这种情况下,仅一个LED被通电的机器人2的动作状态是第二状态、第四状态以及第五状态。根据上述结构,在这种状态时,即使为了诊断故障而进行了对其他一个LED的通电,也就是说,即使进行了基于第二诊断方法的发光部14的诊断,也能够消除作业人员安全性降低的担忧。以下,对其理由进行说明。
首先,在机器人2为第二状态时,即使进行了对B-LED17的通电,发光部14的发光颜色也变成作为红色与蓝色的混合颜色的洋红色,不会变成表示机器人2的其他状态的颜色,因此作业人员不会误认机器人2的动作状态而不小心靠近,能够消除安全性降低的担忧。另外,在机器人2为第二状态时,即使进行了对G-LED16的通电,发光部14的发光颜色也变成作为红色与绿色的混合色的黄色。在这种情况下,黄色与第三状态相对应,与原先的发光颜色即红色同样地,是表示机器人2的动作状态为错误的颜色。因此,作业人员即使注意到发光颜色从红色变化为黄色,对于机器人2的动作状态为错误的认识也不会变化,不会不小心靠近机器人2,能够消除安全性降低的担忧。
在机器人2为第四状态时,即使进行了对R-LED15的通电,发光部14的发光颜色也变成作为绿色与红色的混色颜色的黄色。如上述所述,黄色是表示机器人2的动作状态为错误的颜色。因此,作业人员即使注意到发光颜色从绿色变化为黄色,也识别为机器人2的动作状态从初始化中变化为错误,不会不小心靠近机器人2,能够消除安全性降低的担忧。另外,在机器人2为第四状态时,即使进行了对B-LED17的通电,发光部14的发光颜色也变成作为绿色与蓝色的混色颜色的青色,不会变成表示机器人2的其他状态的颜色,因此作业人员不会误认机器人2的状态而不小心靠近,能够消除安全性降低的担忧。
在机器人2为第五状态时,即使进行了对R-LED15的通电,发光部14的发光颜色也变成作为蓝色与红色的混色颜色的洋红色,不会变成表示机器人2的其他状态的颜色,因此作业人员不会误认机器人2的状态而不小心靠近,能够消除安全性降低的担忧。另外,在机器人2为第五状态时,即使进行了对G-LED16的通电,发光部14的发光颜色也变成作为蓝色与绿色的混合颜色的青色,不会变成表示机器人2的其他状态的颜色,因此作业人员不会误认机器人2的动作状态而不小心靠近,能够消除安全性降低的担忧。
另外,根据上述结构,在仅一个LED被通电的状态(第二状态、第四状态以及第五状态)时,即使为了诊断故障而进行了对其他两个LED的通电,也就是说,即使进行了基于第三诊断方法的发光部14的诊断,也能够消除作业人员安全性降低的担忧。进一步,根据上述结构,在两个LED被通电的状态(第三状态)时,即使为了诊断故障而进行了对其他一个LED的通电,也能够消除作业人员安全性降低的担忧。以下,对其理由进行说明。
即,在这些情况下,发光部14的发光颜色均为白色。在本实施方式中,白色是表示机器人2自动地执行规定的动作的第一状态的颜色。因此,即使作业人员注意到发光部14的发光颜色从原先的颜色变化为白色,也识别为机器人2的动作状态从原先的颜色所表示的状态变化为第一状态,结果上不会不小心靠近机器人2,能够消除安全性降低的担忧。
这样,根据上述结构,能够可靠地防止发生如下情况:尽管是作业人员误靠近机器人2时有可能在安全性上产生问题的状态(特别是第一状态),作业人员根据发光部14的发光颜色误认为机器人2的动作状态为即使靠近机器人2也没有问题的状态(特别是第五状态)而不小心靠近机器人。
根据本实施方式的第二诊断方法,还可获得如下的效果。首先,通过在仅R-LED15被通电的第二状态时实施诊断,可获得如下的效果。即,第二状态是发生了重要度比较高的错误的状态,因此本来作业人员就不会不小心靠近机器人2。因此,即使在该第二状态下其他LED短时间点亮从而使发光颜色瞬间变化,作业人员靠近机器人2的可能性也极低。因此,通过在第二状态时实施诊断,能够在良好地维持安全性的同时进行发光部14的故障诊断。
另外,通过在仅G-LED16被通电的第四状态时实施诊断,可获得如下的效果。即,第四状态是机器人2为初始化中的状态,因此能够在这种初始化过程中进行发光部14的故障诊断。因此,通过在第四状态时执行诊断,能够防止发生在发光部14发生了故障的状态下机器人2迁移至通常的动作状态的情况,其结果是安全性得到提高。
进一步,通过在仅B-LED17被通电的第五状态时实施诊断,可获得如下的效果。即,第五状态是机器人2为直接示教模式的状态。通常,直接示教需要比较长的时间。因此,通过在第五状态时实施诊断,作为进行发光部14的故障诊断的时间能够确保比较长的时间,能够尽早发现发光部14的故障,其结果是安全性得到提高。
在第二诊断方法中,也可以根据如下的思路设定执行对未进行通电的两个LED16、17中的一者LED17的通电的诊断期间、与执行对另一者LED16的通电的诊断期间的间隔,换言之执行对LED17的通电之后到执行对LED16的通电为止的间隔。即,当以在执行对LED17的通电之后,经过比较短的时间后执行对LED16的通电的方式设定上述间隔时,作业人员在基于对LED17的通电导致的第一次的发光颜色的变化而具有针对发光颜色变化的警惕心的状态下,有可能产生基于对LED16的通电导致的第二次的发光颜色的变化,于是,有可能明确地注意到该第二次的发光颜色的变化。
因此,也可以以如下方式设定上述间隔:即,在执行对LED17的通电之后,紧接着执行对LED16的通电。这样,发光部14的发光颜色连续地变化,因此作业人员难以明确地识别变化的发光颜色,另外,留意原本发光颜色是否变化的可能性也低。或者,也可以以如下方式设定上述间隔:即,在执行对LED17的通电之后,经过比较长的时间后执行对LED16的通电。
这样,通过进行对LED17的通电来使发光颜色变化后,经过比较长的时间之后再进行对LED16的通电来使发光颜色再次变化。因此,作业人员即使多少注意到第一次的发光颜色的变化,由于之后经过比较长的时间,因而对于该变化的警惕心减弱,不会过度地对发光颜色的变化作出反应,明确地留意第二次的发光颜色的变化的可能性降低。
故障诊断装置20具备通知部26,当作为进行故障诊断的结果获得在发光部14发生了故障的结果时,该通知部26进行通过与LED15~18的点亮不同的方法来向作业人员(用户)通知在发光部14发生了故障的通知处理。在检测出发光部14的故障时,不是可正常地进行LED16~18的点亮的状态的可能性较高,因此在通过LED15~18的点亮来通知在发光部14发生了故障的方法中,有可能无法实现可靠的通知。根据上述结构,通过与LED15~18的点亮不同的方法来通知在发光部14发生了故障,因此能够实现可靠的通知。
在本实施方式中,作为上述通知的具体方法,可采用以下方法:即,切断对机器人2的动力供给以使机器人2紧急停止。这样,即使由于在发光部14发生了故障而假设作业人员误认了发光部14的发光颜色,由于强制地停止机器人2的动作,因此能够消除作业人员的安全性伴随该误认而降低的担忧。
在本实施方式的结构中,用于产生根据LED15~17的端子电压而变化的诊断电压Vd的电阻22设置于控制器3,电压检测部24检测该电阻22的端子的电压以作为诊断电压Vd。也可以变形为在机器人2侧设置这样的电阻22,而不是设置在控制器3侧。然而,根据本实施方式的结构,与这种变形例的结构相比,存在如下的优点。
在变形列的结构中,连接控制器3与机器人2之间的电缆18的条数(配线的数量)会增加。即,在本实施方式的结构中,仅利用用于向发光部14供给电源电压Va的配线(电源线L1)即可,但是在变形例的结构中,除此之外,还需要用于从机器人2向控制器3导入诊断电压Vd的配线。也就是说,根据本实施方式的结构,与变形例的结构相比,能够减少一个配线18的配线数量。
在变形列的结构中,设置于控制器3的电压检测部24通过电缆18的配线检测设置于机器人2的电阻22的端子电压,因此,诊断电压Vd的检测精度有可能由于配线中的噪声的影响、配线中的电压下降的影响等而降低。与此相对地,在本实施方式的结构中,设置于控制器3的电压检测部24检测同样设置于控制器3的电阻22的端子电压以作为诊断电压Vd,因此诊断电压Vd的检测精度不会由于配线中的噪声的影响、配线中的电压下降的影响等而降低,与变形例的结构相比能够提高诊断电压Vd的检测精度。
(第二实施方式)
以下,参照图8,对相对于第一实施方式变更了发光部的结构的第二实施方式进行说明。
如图8所示,本实施方式的发光部31相对于第一实施方式的发光部14的不同之处在于,分别具备四个R-LED15、G-LED16以及B-LED17等。
在这种情况下,开关SWr的另一个端子经由电阻Rr、以及四个R-LED15的每一个连接到接地线L2。另外,在这种情况下,开关SWg的另一个端子经由电阻Rg、以及四个G-LED16的每一个连接到接地线L2。另外,在这种情况下,开关SWb的另一个端子经由电阻Rb、以及四个B-LED17的每一个连接到接地线L2。
根据上述结构,通过指令信号Sr来控制对四个R-LED15的通电,通过指令信号Sg来控制对四个G-LED16的通电,通过指令信号Sb来控制对四个B-LED17的通电。因此,在上述结构中,通过开关SWr被导通,四个R-LED15被通电并点亮;通过开关SWg被导通,四个G-LED16被通电并点亮;通过开关SWb被导通,四个B-LED17被通电并点亮。
对于以上说明的本实施方式的结构的发光部31,也能够通过在第一实施方式中说明的故障诊断装置20使用同样的方法来进行故障诊断。只是,在这种情况下,作为故障部位的确定,无法确定到四个R-LED15中的哪个LED发生了故障这样的程度。换言之,在这种情况下,能够确定四个R-LED15中的某个发生了故障。此外,这对于G-LED16以及B-LED17也是同样的。
(其他的实施方式)
此外,本发明不限定于上述且附图中记载的实施方式,在不脱离其宗旨的范围内可任意地进行变形、组合或者扩展。
在上述实施方式中示出的数值等是示例,并不限定于此。
本发明的机器人的故障诊断装置不仅限于用在作为一般的工业用机器人系统的机器人系统1中,能够适用于具备发光颜色不同的多种LED被个别地通电并点亮来发出与机器人的状态相应的颜色的光的发光部的、所有机器人系统。
在上述各实施方式中,用于产生诊断电压Vd的电阻22设置在对LED15~17的通电路径的上游侧(电源线L3侧),电压检测部24检测电阻22的下游侧的端子电压以作为诊断电压Vd。但是,这种电阻22能够设置在对LED15~17的通电路径的下游侧(接地线L2侧)。在这种情况下,电压检测部24检测设置于下游侧的电阻22的上游侧的端子电压以作为诊断电压Vd。
- 机器人的故障诊断装置及其机器人系统
- 机器人、故障诊断系统、故障诊断方法以及记录介质