一种基于单目视觉检测的塔吊起重臂形变检测系统
文献发布时间:2023-06-19 10:25:58
技术领域
本发明属于相关检测系统技术领域,具体涉及一种基于单目视觉检测的塔吊起重臂形变检测系统。
背景技术
塔吊作为建筑行业的主要施工设备之一,在建筑施工尤其是高层建筑有着不可替代的作用。塔吊的质量是衡量一个国家工业水平的重要指标,对国民经济的发展有着十分重要的意义。塔吊由于现场作业的环境复杂和生产质量的参差不齐,塔吊在作业过程中发生事故的可能性很大,从而会造成巨大危害和损失。
塔吊起重臂形变量过大所导致起重臂折断是塔吊事故发生的重大来源之一。因此对塔吊起重臂形变量的实时检测有着十分重大的意义。随着人工智能高速的发展,计算机视觉成为了当下最热门的科学技术之一。计算机视觉利用计算机和摄像头可代替人眼对目标进行追踪、检测、识别、处理等内容。塔吊起重臂形变量传统的方式主要是加装传感器,然而塔吊起重臂一般长度很大,所以需要加装多个传感器对其进行检测,对日后的保养和维修带来了十分巨大的工作量。
发明内容
本发明的目的在于提供一种基于单目视觉检测的塔吊起重臂形变检测系统,针对上述情况,以解决上述背景技术中提出的塔吊由于现场作业的环境复杂和生产质量的参差不齐,塔吊在作业过程中发生事故的可能性很大,从而会造成巨大危害和损失等问题。
为实现上述目的,本发明提供如下技术方案:
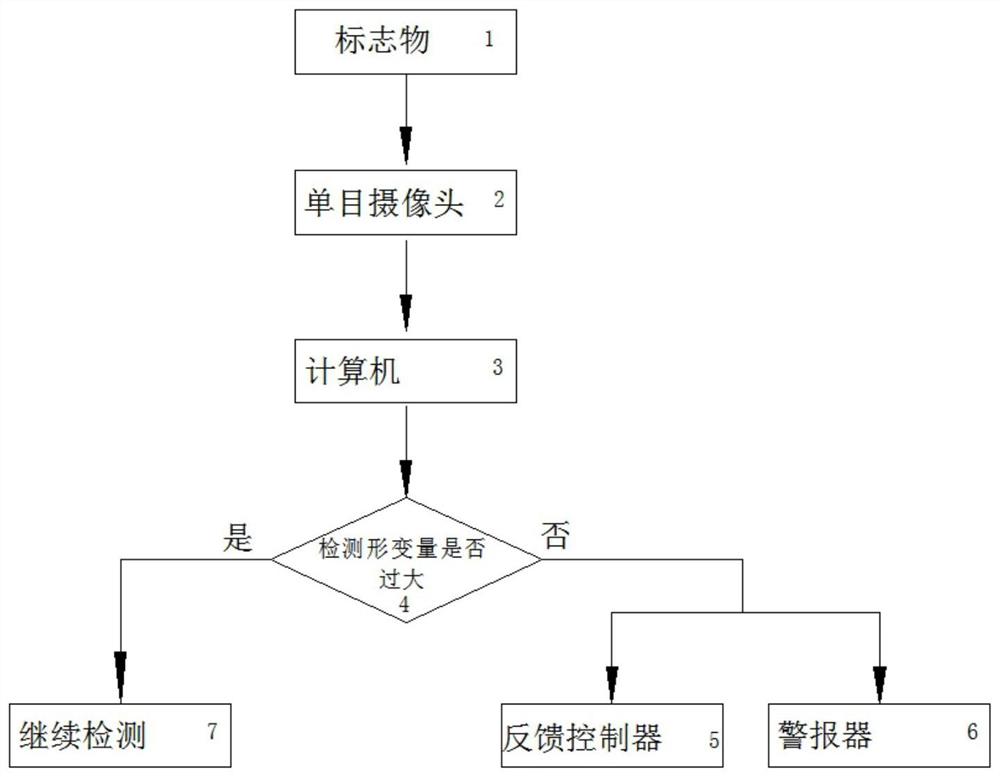
一种基于单目视觉检测的塔吊起重臂形变检测系统,包括标志物,其特征在于:所述标志物连接于单目摄像头,所述单目摄像头用于获取塔吊的实时图片信息,并且固定在易于检测塔吊起重臂贴附标志物位置,所述单目摄像头连接于计算机,所述计算机设置有检测形变量是否过大,所述检测形变量是否过大结果为是时连接于继续检测,所述检测形变量是否过大结果为否时连接于反馈控制器以及报警器。
优选的,所述标志物设置为单颜色圆形标志物,通过计算机视觉的HSV色彩空间设定的阈值即可锁定颜色标志物,贴附在塔吊起重臂的节点上,用于获得检测的特征点,标志物均匀并水平的附着在塔吊起重臂的每一节,并且标志物的颜色应与塔吊颜色及摄像头拍摄范围内的物体不一致。
优选的,所述当锁定阈值后,可通过Hough变换检测出圆心为检测的特征点。
优选的,所述计算机为win10 x64位计算机结构,并且采用了Camshift算法和Kalman滤波器结合的追踪算法,由于塔吊起重臂为运动构件,需要对标志物进行运动追踪,计算机可通过有线或者无线的方式与摄像头和塔吊的控制器取得通讯,运行检测的程序对塔吊的形变量检测,当形变量过大时,则计算机向塔吊控制器发送信号。
优选的,所述计算机采用单目视觉检测系统,包括了色彩空间的转换、圆形单颜色标志物的识别、圆形单颜色标志物的运动追踪以及圆心相对位移计算等功能,不但计算得到塔吊实际的形变量,还可以通过对图像中特征点的像素坐标提取以及相邻帧之间像素坐标做差,得到标志物的像素位移,通过换算得到物体的实际位移。
优选的,所述反馈控制器设置为可编程控制器,当接收到塔吊形变量过大指令时,对塔吊进行限位控制,停止提升起重。
优选的,所述塔吊最大形变量安全值为提前的预设值,当检测的值超过预设值时,所述报警器立即接收到塔吊形变量过大指令,进行报警功能,警报器设置为计算机发送指令启动,与塔吊限位器同时启动,起到对塔吊操作人员及其他工作的警示作用。
与现有技术相比,本发明提供了一种基于单目视觉检测的塔吊起重臂形变检测系统,具备以下有益效果:
本实用一种基于单目视觉检测的塔吊起重臂形变检测系统,标志物设置为单颜色圆形标志物,通过计算机视觉的HSV色彩空间设定的阈值即可锁定颜色标志物,贴附在塔吊起重臂的节点上,用于获得检测的特征点,并且计算机采用了Camshift算法和Kalman滤波器结合的追踪算法,可通过有线或者无线的方式与摄像头和塔吊的控制器取得通讯,运行检测的程序对塔吊的形变量检测,并且计算机具备单目视觉检测系统,包括了色彩空间的转换、圆形单颜色标志物的识别、圆形单颜色标志物的运动追踪以及圆心相对位移计算等功能,可以准确的得到标志物的像素位移,从而换算得出物体的实际位移,塔吊最大形变量安全值为提前的预设值,当检测的值超过预设值时,报警器立即接收到塔吊形变量过大指令,进行报警功能,警报器设置为计算机发送指令启动,与塔吊限位器同时启动,起到对塔吊操作人员及其他工作的警示作用,确保塔吊工作的安全性以及施工人员的人身安全,本实用一种基于单目视觉检测的塔吊起重臂形变检测系统,通过计算机视觉设定的阈值锁定标志物,获得检测的特征点,采用追踪算法标志物进行运动追踪,得到标志物的像素位移,通过换算得到物体的实际位移,不但操作简单,适应地区广泛,确保塔吊作业的安全性。
附图说明
附图用来提供对本发明的进一步理解,并且构成说明书的一部分,与本发明的实施例一起用于解释本发明,并不构成对本发明的限制,在附图中:
图1为本发明提出的一种基于单目视觉检测的塔吊起重臂形变检测系统示意图;
图2为本发明提出的色彩空间模型结构示意图;
图3为本发明提出的三维空间结构示意图;
图4为本发明提出的所求的圆心结构示意图;
图5为本发明提出的算法流程结构示意图;
图6为本发明提出的标志物圆心形变位移结构示意图;
图中:1、标志物;2、单目摄像头;3、计算机;4、检测形变量是否过大;5、反馈控制器;6、报警器。
具体实施方式
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
请参阅图1-6,本发明提供一种技术方案:
一种基于单目视觉检测的塔吊起重臂形变检测系统,包括标志物1,所述标志物1连接于单目摄像头2,所述单目摄像头2用于获取塔吊的实时图片信息,并且固定在易于检测塔吊起重臂贴附标志物位置,所述单目摄像头2连接于计算机3,所述计算机3设置有检测形变量是否过大4,所述检测形变量是否过大4结果为是时连接于继续检测7,所述检测形变量是否过大4结果为否时连接于反馈控制器5以及报警器6。
所述的标志物1在塔吊安装前应平行均匀贴附在塔吊起重臂的可视位置;将单目摄像头2安装于相对起重臂固定的位置,相机应能可视起重臂上的所有圆形标志物1,并得到此时相机的焦距和相机到每个标志物的水平距离;将相机与地面计算机实现无线通信;将计算机与塔吊控制器取得通信。
所述的色彩空间转换为将摄像头输入的RGB色彩空间转换成HSV色彩空间。
所述RGB颜色空间是平时最常见的一种色彩空间,RGB就是我们常说的光学三原色,R、G、B分别代表三种不同的颜色,R代表的是红色,G代表绿色,B代表蓝色,这三种颜色在色彩空间模型中的取值都是0~255,其他的颜色都可以通过这三种颜色叠加混合得到,其模型如图2所示。
所述HSV颜色空间是与人眼所看色彩比较接近的色彩空间,所以经常被用来检测与识别颜色。色调用H表示,饱和度表示为S、黑暗程度或者说光亮程度表示为V。由图2-3我们可以观察到,红色、绿色、蓝色三种颜色之间两两相隔120度,黑白两种颜色之间相隔180度,S和V的取值都在0-1,颜色空间示意图如图2所示。
所述的RGB颜色空间转换成HSV色彩空间可通过以下计算方式得到:
V=max(R,G,B)
所述的圆心单颜色标志物1为区分与塔吊本身颜色的颜色标志物1,并且与摄像头拍摄范围内的周边景观进行区分。
所述的单颜色标志物1圆检测通过Hough变换来实现,当图像空间为一个圆的时候,变换后参数空间得到的是圆锥。在二维平面中,对于一个圆心为(a,b),半径为r的圆,我们通常可以表示为:
(x-a)
此时,参数β=[a,b,r]
所述的标志物圆心检测建立在标志物圆检测出的基础上。对于圆周上中任意的边缘点经过Hough变换之后空间中都有唯一的圆锥与其对应。对于检测出圆周的边缘点(x
所述的塔吊起重臂为运动物体,虽然摄像头随起重臂一起运动,理想情况下起重臂与摄像头应保持相对的静止。但塔吊起重臂起吊重物时会产生形变位移,故需要对塔吊的位移运动进行追踪,可转换成对标志物1特征点进行追踪,即对标志物圆心进行追踪。
所述计算机3为win10 x64位计算机结构,并且采用了Camshift算法和Kalman滤波器结合的追踪算法。
所述的Camshift算法其实质是采用梯度下降法,沿着梯度下降的方向逐步迭代,直到梯度值为零。在n维空间R
其中,C
其中大圆代表半径为h的球形空间,箭头的尾部代表的是指当前计算的样本x,箭头代表的是计算后的漂移向量M
所述的Kalman算法能对运动物体的状态序列线性最小方差进行估计。通过建立状态方程,将观测的数据当做状态输入,对状态的方程参数进行优化。通过前面运动状态最优估计出下一个运动状态。在目标追踪过程中,当出现目标短暂被遮挡消失时,Kalman可以有效的解决这一系类问题。Kalman滤波器可以用以下状态方程来表示:
x
z
其中,F
所述的Camshift算法和Kalman算法对运动追踪单独使用具有一定的局限性。Kalman算法只适用于线性的追踪系统,Camshift算法则不具有预测机制。
所述采用的Camshift算法与Kalman算法相结合的方法,运用Kalman算法的预测机制对Camshift算法起到优化作用,在追踪目标短暂消失或者被遮挡的情况下,追踪系统仍然有较好的鲁棒性,可以对目标进行良好的追踪。
所述运用的算法通过设定阈值α,如果巴氏距离大于阈值,则判断追踪目标被遮挡;当判断为被遮挡的情况时,则通过Kalman算法对目标进行预测追踪,否则,则使用Camshift算法对目标进行追踪。通过利用这两种算法融合的方式,使得追踪系统可以通过线性预测的方法处理遮挡或者目标消失的情况,对运动目标进行稳定追踪,算法流程如图6所示。
所述单目位移检测,在物理成像平面中存在一个像素坐标系o-u-v,p'点在像素坐标系的坐标为[u,v]
v轴与物理坐标系y轴平行。由图可知,像素坐标系与物理成像平面之间相差了一个缩放和一个平移。假设在像素坐标系u轴缩放了α倍,在v轴上缩放了β倍。原点平移了[c
以相机光心o建立直角坐标系o-x
所以当知道相机焦距和相机到标志物的固定水平距离后,运行程序得到标志物竖直方向的像素位移,根据相似三角形关系,便可得到标志物的实际竖直方向位移。
根据上述原理编写程序则可检测得到标志物圆心位移。
所述的标志物圆心形变位移9,标志物圆心形变位移代表着整个塔吊起重臂的形变位移。
所述的塔吊起重臂最大形变量应为塔吊出厂前给出的固定参数。
所述反馈控制器5设置为可编程控制器,塔吊最大形变量安全值为提前的预设值,当检测的值超过预设值时,所述报警器6立即接收到塔吊形变量过大指令,进行报警功能,同时对对塔吊进行限位紧急制动,塔吊停止运行,警报器6设置为计算机3发送指令启动,与塔吊限位器同时启动,起到对塔吊操作人员及其他工作的警示作用。
本实用一种基于单目视觉检测的塔吊起重臂形变检测系统,标志物1设置为单颜色圆形标志物,通过计算机视觉的HSV色彩空间设定的阈值即可锁定颜色标志物1,贴附在塔吊起重臂的节点上,用于获得检测的特征点,并且计算机3采用了Camshift算法和Kalman滤波器结合的追踪算法,可通过有线或者无线的方式与摄像头和塔吊的控制器取得通讯,运行检测的程序对塔吊的形变量检测,并且计算机3具备单目视觉检测系统,包括了色彩空间的转换、圆形单颜色标志物的识别、圆形单颜色标志物的运动追踪以及圆心相对位移计算等功能,可以准确的得到标志物1的像素位移,从而换算得出物体的实际位移,塔吊最大形变量安全值为提前的预设值,当检测的值超过预设值时,报警器6立即接收到塔吊形变量过大指令,进行报警功能,警报器6设置为计算机3发送指令启动,与塔吊限位器同时启动,起到对塔吊操作人员及其他工作的警示作用,确保塔吊工作的安全性以及施工人员的人身安全,本实用一种基于单目视觉检测的塔吊起重臂形变检测系统,通过计算机视觉设定的阈值锁定标志物,获得检测的特征点,采用追踪算法标志物进行运动追踪,得到标志物的像素位移,通过换算得到物体的实际位移,不但操作简单,适应地区广泛,确保塔吊作业的安全性。
尽管已经示出和描述了本发明的实施例,对于本领域的普通技术人员而言,可以理解在不脱离本发明的原理和精神的情况下可以对这些实施例进行多种变化、修改、替换和变型,本发明的范围由所附权利要求及其等同物限定。
- 一种基于单目视觉检测的塔吊起重臂形变检测系统
- 一种基于单目视觉的弓网静态接触力检测系统