抓持器、持针器、夹持件
文献发布时间:2023-06-19 10:32:14
技术领域
本发明涉及:在狭窄空间等之中,一种将手术器具或生体组织等以垂直接线方向操控的抓持器、一种可在垂直接线方向运针的持针器、一种用于这些抓持器及持针器的夹持件。
本申请主张于2018年8月24日在日本提出申请的特愿2018-157545号专利的优先权,并于此援引其内容。
背景技术
众所皆知地,外科手术在各种的环境条件下,进行生体的抓持、穿孔、缝合等的技法。因此,使用以钳子为首的各种的抓持器、持针器(举例而言,参照专利文献1)。
目前为止,在缝合生体组织等时,一般是以与持针器的长边方向正交的横向方向抓持缝合针,并且绕长边方向扭转持针器而进行运针。
近年来,在狭窄空间中通过内视镜手术的低侵入性手术逐渐兴起,在狭窄空间中的低侵入性手术中,在狭窄视野下可以有效地夹持缝合针等并且有效地操控的需求逐渐兴起。
因此,为了在狭窄空间中有效地实施抓持操作或缝合手法,举例而言,开发出可以在持针器的长边方向(以下也会称为垂直接线方向)以缝合针进行运针的抓持器、持针器(举例而言,参照专利文献2)。
专利文献2记载的抓持器、持针器为,通过在垂直接线方向上以缝合针等的对象物进行操纵及运针,具有在狭窄空间中可以有效进行手术的优点。
然而,专利文献2记载的抓持器及持针器在夹持对象物时,因为必须开闭钳子本体的臂部,因此,在距离体外较远位置的深处手术视野中的夹持操作或通过小孔径的穿刺套筒(trocar)的夹持操作未必是容易的。
因此,揭示了通过从夹持操作输入部、回转操作输入部到夹持部为止可收纳于管件内的构造,可以容易地通过穿刺套筒将夹持部插入手术视野内,可以在狭窄空间中有效地进行夹持操作、回转操作的抓持器、持针器(举例而言,参照专利文献3)。
专利文献3记载的抓持器、持针器可以在狭窄空间中可以容易且有效地夹持缝合针等的对象物,并且具有可以有效地在垂直接线方向上操纵及运针对象物的优点。
【背景技术文献】
【专利文献】
【专利文献1】日本国特开平8-038492号公报
【专利文献2】日本国特开2013-111119号公报
【专利文献3】日本国特开2018-000391号公报
发明内容
【发明欲解决的课题】
然而,专利文献3记载的抓持器为,在夹持对象物时,因为夹持部的闭合端通过棘轮的位置而构成为统一制定,因此,在夹持操作时,闭合端制定为与对象物的强度等无关。再者,在夹持对象物时,若夹持操作力过大,其力量直接传递至对象物,可能发生对象物变形、损伤等。另一方面,若夹持操作力过小,则在充分夹持对象物之前,棘轮已卡合,夹持部无法充分夹持对象物,可能发生位置偏移或脱落等。
再者,因为希望抛弃式地使用夹持构件,因此,希望夹持构件可以容易且有效地装设于抓持器、持针器,并且希望夹持构件是可以通过抓持器等确实地固持的夹持件(装卸式夹持构件)。
本发明为考虑上述事情而成,以至少实现以下的其中一项为目的。
(1)提供抓持器、持针器,所述抓持器、持针器提升夹持对象物时的夹持操作的信赖度,并且可以容易且有效地操作。
(2)提供夹持件,所述夹持件可以容易且有效地装设于抓持器本体,并且可以确实地固持于抓持器等。
【解决课题的手段】
为了解决上述课题,本发明提议以下的手段。
(1)本发明的第一样态是一种抓持器,所述抓持器抓持对象物,所述抓持器具备:抓持件,所述抓持件具有:一对的夹持臂件,所述一对的夹持臂件在长边方向的前端侧形成有夹持对象物的夹持部,并且,所述一对的夹持臂件绕第一轴线相对地回转,使所述夹持部接近或远离;及夹持臂保持部,所述夹持臂保持部配置为所述一对的夹持臂件可以绕所述第一轴线回转;第一驱动部,所述第一驱动部具有:夹持操作部,所述夹持操作部用于以所述一对的夹持臂件进行夹持操作;及夹持操作传达部,所述夹持操作传达部将夹持操作从所述夹持操作部传达至所述一对的夹持臂件;所述第一驱动部通过从所述夹持操作部输入的夹持操作而使所述夹持部接近;第二驱动部,所述第二驱动部具有:回转操作部,所述回转操作部用于以所述一对的夹持臂件进行回转操作;及抓持件回转部,所述抓持件回转部通过从所述回转操作部输入的回转操作而使所述抓持件绕第二轴线回转,所述第二轴线与所述夹持臂件的长边方向的长边方向及所述第一轴线正交;以及抓持器本体,所述抓持器本体形成为长状,所述抓持器本体以与所述长边方向交叉的方向形成有供操作者抓握的抓握部,并且,所述抓持件、所述第一驱动部、及所述第二驱动部配置于所述抓持器本体;所述第一驱动部具备:夹持操作位移吸收单元,所述夹持操作位移吸收单元通过从所述夹持操作部输入的夹持操作而朝向所述夹持部相对接近的一侧对于所述一对的臂件施力。
(1)根据关于第一样态的抓持器,因为具备:抓持件,所述抓持件具有:一对的夹持臂件,所述一对的夹持臂件在长边方向的前端侧形成有夹持对象物的夹持部,并且,所述一对的夹持臂件绕第一轴线相对地回转,使夹持部接近或远离;及夹持臂保持部,所述夹持臂保持部配置为一对的夹持臂件可以绕第一轴线回转;第一驱动部,所述第一驱动部具有:夹持操作部,所述夹持操作部用于以一对的夹持臂件进行夹持操作;及夹持操作传达部,所述夹持操作传达部将夹持操作从夹持操作部传达至一对的夹持臂件;所述第一驱动部通过从夹持操作部输入的夹持操作而使夹持部接近;第二驱动部,所述第二驱动部具有:回转操作部,所述回转操作部用于以一对的夹持臂件进行回转操作;及抓持件回转部,所述抓持件回转部通过从回转操作部输入的回转操作而使抓持件绕第二轴线回转,所述第二轴线与夹持臂件的长边方向及第一轴线正交;以及抓持器本体,所述抓持器本体形成为长状,所述抓持器本体以与长边方向交叉的方向形成有供操作者抓握的抓握部,并且,抓持件、第一驱动部、及第二驱动部配置于所述抓持器本体;因此,操作者可以夹持操作第一驱动部,使夹持部容易且有效地接近(闭合)以夹持对象物,并且回转操作第二驱动部,使一对的夹持臂回转以改变对象物的摆位(或垂直运针)。
再者,因为第一驱动部具备夹持操作位移吸收单元,通过从夹持操作部输入的夹持操作朝向夹持部相对接近的一侧对一对的臂件施力并且吸收位移,因此,抑制在夹持部夹持对象物时发生夹持力不足或是游隙,可以通过适量的夹持力夹持对象物。
再者,因为第一驱动部具备夹持操作位移吸收单元,夹持操作输入的位移通过弹性付与单元吸收,并不会直接传达至夹持部,因此,尽管从夹持操作部输入较大的力,也可以抑制对于对象物以及构成第一驱动部的构件产生损害。
其结果,提升夹持对象物时的夹持操作的信赖度,操作者可以容易且有效地操作抓持器。
于此,夹持部相对地接近或远离包含:保持互相平行的摆位并且相向的夹持部(或夹持面)接近或远离;以及夹持臂件回转并开闭,使夹持部在彼此的朝向改变的同时接近或远离的状态下,通过适于抓持对象物的摆位相向。
再者,在夹持部相对地接近或远离的情况下,形成于一对的夹持臂件的夹持部可以一起移动并且接近,也可以是其中一个夹持部移动并且接近另外一个夹持部。
再者,夹持臂件的长边方向是指:在夹持臂件闭合状态下,夹持部延伸的方向。
再者,夹持操作位移吸收单元是指:在从夹持操作部输入夹持操作的情况下,可以吸收(缓和)并输出(传达)通过夹持操作输入的位移的构件,举例而言,通过S字弹簧、线圈弹簧、卷簧、扭簧等以弹性构件构成的构件、亦可为由与外部封闭的气缸组成的空气弹簧等、通过压缩流体而吸收位移的构件等吸收输入的位移并输出的各种的结构的构件。
再者,对象物包含:生体(包含其一部分)或组织、穿孔器具、切开器具、缝合针等。
(2)如上述(1)所记载的抓持器,所述夹持操作位移吸收单元可以配置于所述夹持操作传达部,并且通过柔性传达件构成,所述柔性传达件通过夹持操作传达力而作用。
根据上述(2)所记载的抓持器,因为夹持操作位移吸收单元配置于夹持操作传达部,并且通过柔性传达件构成,所述柔性传达件通过夹持操作传达力而作用,因此,通过简单的构造,可以确实地对夹持操作传达付与施力(弹性力)。
再者,在夹持臂件闭合时,通过柔性传达件变形,可以吸收夹持操作引起的位移,抑制作用于夹持部。
于此,柔性传达件是指:可以将伴随夹持操作的夹持力通过弹性力变形或转换为位移的构件。
(3)如上述(2)所记载的抓持器,所述夹持操作位移吸收单元可以通过轴向尺寸伸缩弹簧构成。
根据上述(3)所记载的抓持器,因为夹持操作位移吸收单元通过轴向尺寸伸缩弹簧构成,因此,通过轴向尺寸伸缩弹簧变形,可以吸收夹持操作引起的位移,抑制过大的力作用于夹持部。再者,可以确实地夹持对象物。
(4)如上述(2)所记载的抓持器,所述夹持操作位移吸收单元可以通过轴向尺寸伸缩弹簧构成,所述轴向尺寸伸缩弹簧具有:弹性材料绕组而形成的绕组部。
根据上述(4)所记载的抓持器,因为夹持操作位移吸收单元通过轴向尺寸伸缩弹簧构成,所述轴向尺寸伸缩弹簧具有:弹性材料绕组而形成的绕组部,因此,可以抑制伴随夹持操作的过大夹持力作用于夹持部。再者,可以确实地夹持对象物。
(5)如上述(2)所记载的抓持器,所述夹持操作位移吸收单元可以通过S字形的轴向尺寸伸缩弹簧构成,所述S字形的轴向尺寸伸缩弹簧通过弹性材料互相朝向相反侧的弯曲部构成。
根据上述(5)所记载的抓持器,因为夹持操作位移吸收单元通过S字形的轴向尺寸伸缩弹簧构成,所述S字形的轴向尺寸伸缩弹簧通过弹性材料互相朝向相反侧的弯曲部构成,因此,可以抑制伴随夹持操作的过大夹持力作用于夹持部。再者,可以确实地夹持对象物。
(6)如上述(2)所记载的抓持器,如上述(1)至(5)中任一项所记载的抓持器,所述抓持器可以具备夹持操作锁定机构,所述夹持操作锁定机构通过操作所述夹持操作部,自动地保持所述夹持部的夹持状态。
根据上述(6)所记载的抓持器,因为具备夹持操作锁定机构,所述夹持操作锁定机构通过操作夹持操作部,自动地保持夹持部的夹持状态,因此,作为夹持操作的一环,可以有效地进行夹持部的状态。再者,可以通过所希望的夹持力夹持对象物。
(7)如上述(1)至(6)中任一项所记载的抓持器,所述抓持器可以具备夹持操作解除机构,在所述夹持操作锁定机构保持所述夹持部的夹持状态的状态下,通过操作所述夹持操作部,所述夹持操作解除机构通过所述夹持操作部解除所述夹持部的夹持状态。
根据上述(7)所记载的抓持器,因为具备夹持操作解除机构,在夹持操作锁定机构保持所述夹持部的夹持状态的状态下,所述夹持操作解除机构通过夹持操作部而解除夹持部的夹持状态,因此,可以有效地解除夹持部的夹持状态。
(8)本发明的第二样态是一种持针器,所述持针器具备如上述(1)至(7)中任一项所述的抓持器,在所述夹持部形成有:与缝合针对应的缝合针夹持凹部。
根据上述(8)所记载的持针器,因为在夹持部形成有与缝合针对应的缝合针夹持凹部,因此,可以容易且稳定地抓持缝合针。
其结果,在狭窄空间等,可以稳定地抓持缝合针并且有效且稳定地运针。
(9)本发明的第三样态是一种夹持件,所述夹持件用于装设于上述(1)至(8)中任一项所述的抓持器,所述抓持器具有夹持臂作动杆以及抓持件回转部,所述夹持臂作动杆构成所述第一驱动部并且将夹持操作传达至所述一对的夹持臂件,所述抓持件回转部构成所述第二驱动部并且使所述抓持件绕所述第二轴线回转,在所述抓持件回转部形成有:可装卸地装设于所述抓持件的第一卡合部;所述一对的夹持臂件的其中一个夹持臂件连接于所述夹持臂保持部的前端侧,并且,所述一对的夹持臂件的另外一个夹持臂件的基端侧连接于从所述夹持臂作动杆接收夹持操作的夹持操作接受杆;所述夹持操作接受杆配置为通过从所述夹持臂保持部的前端侧朝向基端侧形成的贯穿孔而位于与所述夹持臂作动杆对应的位置;所述夹持臂保持部在基端侧形成有与所述第一卡合部对应的第二卡合部,所述第一卡合部及所述第二卡合部为:在将形成于其中一个上的轴套插入形成于另外一个上的孔洞的状态下在装卸方向设定安装位置,并且在所述安装位置具有防止朝向所述装卸方向脱离的凸缘部,所述凸缘部在所述安装位置构成为绕沿所述装卸方向的轴线回转并且通过所述凸缘部互相重叠而卡合;所述夹持操作接受杆构成为,通过使所述一对的夹持臂件的夹持部接近,在将所述第一卡合部及所述第二卡合部扭转至可在所述装卸方向移动的状态下,可以插入所述夹持臂作动杆与所述夹持臂保持部之间。
根据上述(9)所记载的夹持件,第一卡合部及第二卡合部在装卸方向移动时扭转为彼此的凸缘部不干涉的位置,将形成于第一卡合部及第二卡合部中的其中一个上的轴套插入形成于另外一个上的孔洞,在装卸方向配置于安装位置。而且,绕沿装卸方向的轴线扭转,使第一卡合部及第二卡合部的凸缘部互相重叠,以第一卡合部及第二卡合部在装卸方向上无法脱离的方式装设夹持件。
再者,将轴套插入孔洞时,通过使一对的夹持臂件的夹持部接近,持操作接受杆可以插入夹持臂作动杆与夹持臂保持部之间。
其结果,夹持件可以容易且有效地装设于抓持件本体。
【发明的效果】
根据本发明的抓持器及持针器,提升夹持对象物时的夹持操作的信赖度,并且可以容易且有效地操作。
再者,根据本发明的夹持件,可以容易且有效地装设于抓持器本体,并且可以确实地固持于抓持器等。
附图说明
【图1】说明关于本发明的第一实施例的持针器的概略构造的从侧面观看的纵向断面图。
【图2】说明安装有关于第一实施例的夹持件的状态的概略构造的斜视图。
【图3A】说明关于第一实施例的夹持件在打开状态的概略构造的平面图。
【图3B】说明关于第一实施例的夹持件在闭合状态的概略构造的平面图。
【图4】说明关于第一实施例的夹持件与抓持件回转部的安装关系的概略构造的图,是夹持件的斜视图。
【图5A】说明关于第一实施例的夹持件与抓持件回转部的安装关系的概略构造的图,是抓持件回转部的斜视图。
【图5B】说明关于第一实施例的夹持件与抓持件回转部的安装关系的概略构造的图,是从基端侧沿装卸方向观看抓持件回转部并且在图5A中以箭头VB-VB所示的断面图。
【图6A】说明关于第一实施例的夹持件的概略装设顺序的图,是描绘扭转夹持件并插入抓持件回转部的状态的斜视图。
【图6B】说明关于第一实施例的夹持件的概略装设顺序的图,是描绘将夹持件装设于抓持件回转部的状态的斜视图。
【图6C】说明关于第一实施例的夹持件的概略装设顺序的图,是描绘打开夹持件的一对的夹持臂件并且使夹持操作接受杆与夹持臂作动杆卡合的状态的斜视图。
【图7A】说明关于第一实施例的夹持件与抓持件回转部的安装关系的概略构造的图,是从基端侧沿装卸方向观看夹持件相对于抓持件回转部扭转的状态并且在图5A中以箭头VB-VB所示的断面图。
【图7B】说明关于第一实施例的夹持件与抓持件回转部的安装关系的概略构造的图,是从基端侧沿装卸方向观看夹持件装设于抓持件回转部的状态并且在图5A中以箭头VB-VB所示的断面图。
【图8】说明关于第一实施例的夹持臂开闭驱动部的概略构造的从侧面观看的纵向断面图。
【图9】说明关于第一实施例的夹持臂开闭驱动部及夹持臂回转驱动部的详细主要部分的侧视图。
【图10】说明关于第一实施例的夹持臂开闭驱动部及夹持臂回转驱动部的详细主要部分的斜视图。
【图11】描绘关于第一实施例的夹持臂开闭驱动部的夹持操作锁定机构的概略构造的从侧面观看的概略构造图。
【图12A】说明关于第一实施例的夹持臂开闭驱动部及夹持操作锁定机构的作用的图,是描绘夹持操作开始前的状态的概略构造图。
【图12B】说明关于第一实施例的夹持臂开闭驱动部及夹持操作锁定机构的作用的图,是描绘夹持操作结束时的状态的概略构造图。
【图13A】说明关于第一实施例的夹持臂开闭驱动部的作用的图,是描绘将夹持臂件打开状态下的轴向尺寸伸缩弹簧的概略构造图。
【图13B】说明关于第一实施例的夹持臂开闭驱动部的作用的图,是描绘将夹持臂件闭合状态下的轴向尺寸伸缩弹簧的概略构造图。
【图14A】说明关于第一实施例的夹持操作锁定机构的解除的图,是描绘夹持操作锁定机构的解除开始时的状态的概略构造图。
【图14B】说明关于第一实施例的夹持操作锁定机构的解除的图,是描绘夹持操作锁定机构解除后的状态的概略构造图。
【图15】说明关于第一实施例的夹持臂回转驱动部的概略构造的从侧面观看的纵向断面图。
【图16】说明关于第一实施例的夹持臂回转驱动部的作用的从侧面观看的概略构造图。
【图17A】说明关于第一实施例的持针器的作用的其一例示的图,是描绘通过夹持臂件夹持缝合针的状态的斜视图。
【图17B】说明关于第一实施例的持针器的作用的其一例示的图,是描绘将缝合针穿刺第一生体组织的状态的示意图。
【图17C】说明关于第一实施例的持针器的作用的其一例示的图,是描绘缝合针缝合第一生体组织与第二生体组织的状态的示意图。
【图17D】说明关于第一实施例的持针器的作用的其一例示的图,是描绘缝合第一生体组织与第二生体组织后替换缝合针的状态的示意图。
【图18】说明关于本发明的第二实施例的持针器的概略构造的从侧面观看的纵向断面图。
【图19】说明关于第二实施例的夹持臂回转驱动部的概略构造的从侧面观看的纵向断面图。
【图20】说明关于第二实施例的夹持臂开闭驱动部的概略构造的从侧面观看的纵向断面图。
【图21】说明关于第二实施例的夹持臂开闭驱动部及夹持臂回转驱动部的详细主要部分的侧视图。
【图22A】说明关于第二实施例的夹持臂开闭驱动部的作用的图,是描绘将夹持臂件打开状态下的S字形弹簧的概略构造图。
【图22B】说明关于第二实施例的夹持臂开闭驱动部的作用的图,是描绘将夹持臂件闭合状态下的S字形弹簧的概略构造图。
【图23】说明关于本发明的第三实施例的抓持器的概略构造的从侧面观看的纵向断面。
【图24A】说明关于本发明的第三实施例的钳件的概略构造的从侧面观看的概略构造图。
【图24B】说明关于本发明的第三实施例的钳件的概略构造的平面视角的概略构造图。
【图24C】说明关于本发明的第三实施例的钳件的概略构造的从基端侧观看的概略构造图。
【图25A】说明关于本发明的第三实施例的抓持器的作用的其一例示的图,是描绘在腹腔内改变生体组织的摆位并且进行处置的情况下的第一摆位的示意图。
【图25B】说明关于第三实施例的抓持器的作用的其一例示的图,是描绘在腹腔内改变生体组织的摆位并且进行处置的情况下的第二摆位的示意图。
【图26A】说明关于本发明的第四实施例的钳件的概略构造的从侧面观看的概略构造图。
【图26B】说明关于本发明的第四实施例的钳件的概略构造的平面视角的概略构造图。
【图26C】说明关于本发明的第四实施例的钳件的概略构造的从基端侧观看的概略构造图。
具体实施方式
<第一实施例>
以下参照图1至图17D,说明本发明的第一实施例。
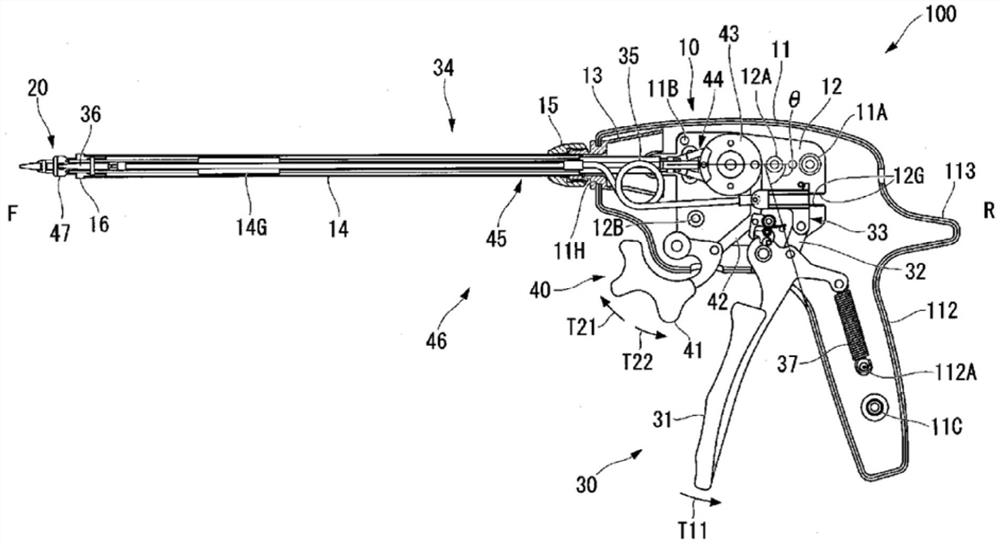
首先,参照图1至图16,说明关于第一实施例的持针器的概略构造。图1是说明关于第一实施例的持针器的概略构造的从侧面观看的纵向断面图,图2是说明安装有夹持件的状态的概略构造的斜视图。再者,图3A是说明夹持件在打开状态的概略构造的平面图,图3B是说明夹持件在闭合状态的概略构造的平面图。
在图1、图2、图3A及图3B中,附图标记100是持针器(抓持器)、附图标记10是持针器本体(抓持器本体)、附图标记20是夹持件(抓持件)、附图标记30是夹持臂开闭驱动部(第一驱动部)、附图标记40是夹持臂回转驱动部(第二驱动部)。再者,附图标记21是一对的夹持臂件(以下也会称为夹持臂件)、附图标记22是夹持部、附图标记24是夹持臂保持部、附图标记20J是回转支撑轴。再者,附图标记O1是用于回转并且开闭夹持臂件21的第一轴线、附图标记O2是用于将夹持臂件21在垂直接线方向上回转的第二轴线、附图标记F是前端侧、附图标记R是基端侧(操作者侧)。
如图1所示,持针器(抓持器)100具备:持针器本体(抓持器本体)10、夹持件(抓持件)20、夹持臂开闭驱动部(第一驱动部)30、以及夹持臂回转驱动部(第二驱动部)40。
而且,持针器(抓持器)100构成为,夹持臂件21绕第一轴线O1回转并且夹持缝合针(对象物),并且夹持件20绕第二轴线O2回转并且使缝合针(对象物)可以在沿垂直接线方向(持针器100的长边方向)的平面内运针。
并且,持针器100亦可以使用作为抓持器,所述抓持器抓持替代缝合针而作为对象物的生体组织(包含其一部分)或穿孔器具、切开器具等。
举例而言,持针器本体(抓持器本体)10具备:壳体11、底板12、管安装件13、保护管14、管安装螺帽15、以及夹持件金属配件16。
如图1所示,壳体11具备:壳体本体111,从基端侧R至前端侧F延伸的长状的略呈雪茄形状部的下方沿长边方向连接有略呈长方体形状部;抓握部112,所述抓握部112一体成形于壳体本体111的略呈长方体的形状部的基端侧R;以及延伸部113,所述延伸部113配置于壳体本体111及抓握部112的基端侧R并且朝向基端侧R延伸;并且,所述壳体11形成为略呈手枪形。
再者,举例而言,壳体11构成为可以在图1所示的断面左右分割,并且,通过呈恒定厚度的塑胶树脂形成的同时,适当地配置轴套及安装用的孔洞。
再者,壳体11形成有:与壳体本体111及抓握部112一体连接的内部空间,此内部空间中,配置有:底板12、管安装件13、夹持臂开闭驱动部30、以及夹持臂回转驱动部40等。再者,壳体11在安装部11A、11B及11C通过安装螺栓将左右组装为一体。再者,壳体11的前端部形成有安装孔11H。
如图1所示,抓握部112形成为略呈长方体状,并且形成为相对于壳体本体111的长边方向(沿保护管14的轴线的方向)的交叉角度θ=约75°。
而且,是操作者抓持抓握部112并且操作夹持臂开闭驱动部30及夹持臂回转驱动部40的构造。
抓握部112相对于壳体本体111的长边方向的交叉角度θ为,举例而言,优选地,通过形成为45°~90°,可以进行稳定的抓持操作及回转操作,更优选地,为60°~85°。
并且,可以任意地设定交叉角度θ,也可将交叉角度θ设定为未达45°。
如图1所示,举例而言,底板12具有:形成为略呈矩形的矩形形状部,并且形成有:从矩形形状部的基端侧R至基端侧F延伸的导引沟12G。
再者,举例而言,底板12通过左右一对构成,通过将套筒等的间隔调整件夹在左右的底板12之间,配置为保持固定的间隔,是从左右夹持夹持臂开闭驱动部30及夹持臂回转驱动部40的构造。
再者,右侧的底板12的略呈矩形形状部的基端侧R连接有:沿基端侧R延伸的支架。
而且,举例而言,在形成于支架的安装部11A、位于矩形形状部的安装部12A及安装部12B,底板12安装于壳体11。
如图1所示,举例而言,管安装件13具备:裙部,所述裙部形成为略呈圆锥台形;以及多段圆筒部,所述多段圆筒部从裙部的顶部朝向前端侧F延伸,所述多段圆筒部的内部形成有管安装孔,所述管安装孔从裙部的顶部沿长边方向贯穿;多段圆筒部的前端侧F形成有外螺纹。
而且,通过将形成于多段圆筒形状部的基端侧R的外周的沟部与壳体11的安装孔11H的缘部对应装设,可以将管安装件13安装于壳体11的前端侧F。
如图1所示,举例而言,保护管14通过圆筒状的不锈钢管构成,是内部收容夹持臂开闭驱动部(第一驱动部)30的一部分及夹持臂回转驱动部(第二驱动部)40的一部分的构造。
再者,举例而言,保护管14的内部配置有杆架等的导引件14G,优选地,是将夹持臂开闭驱动部(第一驱动部)30及夹持臂回转驱动部(第二驱动部)40的一部分的构件从壳体11导引至持针器本体10的前端侧F的构造。
其结果,保护管14防止夹持臂开闭驱动部30及夹持臂回转驱动部40与生体组织接触,也抑制这些构件因为外力而发生运作不良或是破损。
并且,可以任意地设定导引件14G的形式及位置,举例而言,优选地,配置于保护管14的前端侧F及基端侧R的两者。
举例而言,管安装螺帽15具有多段孔,在多段孔的基端侧R的内周面形成有:与管安装件13的外螺纹对应的内螺纹。再者,多段孔的前端侧F形成有:与保护管14的外径对应的内径。
而且,通过在管安装件13的管安装孔插入保护管14,并且将管安装螺帽15装设并锁固于管安装件13,管安装件13固持保护管14,是可以将保护管14高精准度且确实地安装于壳体11的构造。
如图2、图3A及图3B所示,举例而言,夹持件金属配件16具备:基板壁部161,所述基板壁部161形成为圆板状,并且沿前端侧F至基端侧R形成有贯穿孔;第一支撑壁部162;第二支撑壁部163;以及圆筒部164,所述圆筒部164与基板壁部161的基端侧R连接。
第一支撑壁部162从基板壁部161的左端朝向前端侧F沿长边方向形成。再者,第一支撑壁部162上形成有:与第二轴线O2对应的回转轴承孔16H。
第二支撑壁部163从基板壁部161的右端朝向前端侧F沿长边方向形成。再者,第二支撑壁部163上形成有:与第二轴线O2对应的回转轴承孔16H。
再者,第一支撑壁部162及第二支撑壁部163形成为彼此相向,第一支撑壁部162与第二支撑壁部163之间形成有凹部16U。
再来,参照图2至图7B,说明关于第一实施例的夹持件(抓持件)20。
如图2、图3A及图3B所示,举例而言,夹持件(抓持件)20具备:夹持臂件21、夹持臂保持部24、夹持操作接受杆25、复位弹簧(夹持臂复位单元)26、以及支撑轴20J。
举例而言,夹持臂件21具备左夹持臂件21L以及右夹持臂件21R。
而且,左夹持臂件21L及右夹持臂件21R可以绕第一轴线O1相对地回转。
再者,夹持臂件21在长边方向的前端侧F形成有夹持部22。
夹持部22具备夹持凸部(夹持部)22L以及夹持凸部(夹持部)22R。再者,夹持凸部22L及夹持凸部22R构成为,夹持凸部22L的顶部与夹持凸部22R的顶部在长边方向(从基端侧R至前端侧F)上可以彼此相向。
举例而言,邻接的夹持凸部(夹持部)22L与夹持凸部(夹持部)22L之间,在与长边方向交叉(举例而言,正交)的方向上,形成有V字状的夹持凹部23L(23)。
再者,举例而言,邻接的夹持凸部(夹持部)22R与夹持凸部(夹持部)22R之间,在与长边方向交叉(举例而言,正交)的方向上,形成有V字状的夹持凹部23R(23)。
而且,夹持凸部22L及夹持凸部22R是彼此接近以夹持对象物的构造,夹持凸部22L及夹持凸部22R是彼此远离以放开对象物的构造。
左夹持臂件21L在基端侧R连接有夹持操作接受杆25,在长边方向上,左夹持臂件21L与夹持操作接受杆25之间形成有回转轴承孔(未图示)。
接着,参照图4,说明夹持臂保持部24的概略构造。图4是说明关于第一实施例的夹持件与抓持件回转部的安装关系的概略构造的图,描绘夹持件的斜视图。
如图4所示,举例而言,夹持臂保持部24配置于右夹持臂件21R的基端侧R,并且右夹持臂件21R及夹持臂保持部24为一体形成。
再者,夹持臂保持部24从基端侧R朝向前端侧F形成有贯穿孔24U,此贯穿孔24U的前端侧F为,在从基端侧R观看的左侧开口,形成上侧壁部与下侧壁部互相相向的凹部,在此凹部内收容左夹持臂件21L。
再者,此夹持臂保持部24的上侧壁部及下侧壁部形成有:贯穿孔,与第一轴线O1对应的支撑轴20J嵌插于所述贯穿孔。
而且,支撑轴20J插入左夹持臂件21L的回转轴承孔(未图示)中,是可以将左夹持臂件21L绕第一轴线O1相对于夹持臂保持部24回转的构造。
在此实施例中,右夹持臂件21R构成固定夹持臂件,左夹持臂件21L构成可动夹持臂件。
而且,通过左夹持臂件21L绕第一轴线O1回转,使夹持凸部22L及夹持凸部22R接近或远离,以夹持对象物。
再者,夹持臂保持部24在基端侧R形成有安装轴套24A。
再者,安装轴套24A的基端侧R的外周缘部的一部分形成有:向外延伸的两个凸缘部(第二卡合部)24B。
于此,参照图5A及图5B,说明抓持件回转部的概略构造,所述抓持件回转部构成后述的夹持臂回转驱动部(第二驱动部)40的前端部。
图5A是说明夹持件与抓持件回转部的安装关系的概略构造的图,是抓持件回转部的斜视图。再者,图5B是从基端侧沿装卸方向观看抓持件回转部的图5A中以箭头VB-VB所示的断面图。
如图5A及图5B所示,抓持件回转部47具备:基板部471,所述基板部471形成为略呈矩形平板状;第一支撑壁部472,所述第一支撑壁部472从基板部471的左端朝向基端侧R延伸;第二支撑壁部473,所述第二支撑壁部473从基板部471的右端朝向基端侧R延伸;以及回转控制凹部474,所述回转控制凹部474形成于第二支撑壁部473;第一支撑壁部472及第二支撑壁部473形成有:共轴的回转轴承孔47H。
基板部471形成有:从前端侧F至基端侧R贯穿的装设孔47A。
再者,在装设孔47A的内周缘部形成有:沿内周侧延伸并且与两个凸缘部(第二卡合部)24B对应的两个凸缘部(第一卡合部)47B。
而且,通过将凸缘部(第二卡合部)24B及凸缘部(第一卡合部)47B配置为不干涉,安装轴套24A构成为可插入抓持件回转部47的装设孔47A。
再者,举例而言,凸缘部(第二卡合部)24B及凸缘部(第一卡合部)47B在彼此接触的面上各自形成有:螺纹状的锥状面。
而且,凸缘部(第二卡合部)24B及凸缘部(第一卡合部)47B通过彼此紧固,在装卸方向上产生轴向力的同时,接触面彼此的摩擦力增加,凸缘部(第二卡合部)24B及凸缘部(第一卡合部)47B构成为难以脱离。
并且,可以任意设定凸缘部24B及凸缘部47B是否形成此种螺纹状的锥状面,也可以通过棘轮等公知的手段另外防止脱离。
举例而言,复位弹簧(夹持臂复位单元)26通过拉伸弹簧(线圈弹簧)构成。
再者,如图2、图3A及图3B所示,复位弹簧26的第一端安装于弹簧安装销25P,复位弹簧26的第二端安装于弹簧安装销26P。
弹簧安装销26P穿过贯穿孔24U并且固定于夹持臂保持部24。
再者,如图3A及图3B所示,复位弹簧26的第一端插入形成于夹持操作接受杆25的侧面的弹簧插入凹部25U中。
再者,弹簧安装销25P通过销收容孔25H安装于复位弹簧26,所述销收容孔25H从夹持操作接受杆25的上表面朝向弹簧插入凹部25U形成。
而且,将夹持操作接受杆25朝向弹簧安装销26P侧拉伸,构成为在如箭头R12所示的夹持凸部22L及夹持凸部22R远离(打开)的一侧对左夹持臂件21L施力。
接着,参照图6A至图6C、图7A及图7B,说明夹持件的装设顺序。
图6A至图6C是说明关于第一实施例的夹持件的概略装设顺序的图,图6A是描绘扭转夹持件并插入抓持件回转部的状态的图,图6B是描绘将夹持件装设于抓持件回转部的状态的图,图6C是描绘打开一对的夹持臂件并且使夹持操作接受杆与夹持臂作动杆卡合的状态的图。
再者,图7A及图7B是说明夹持件与抓持件回转部的安装关系的概略构造的图,图7A是将夹持件相对于抓持件回转部扭转的状态,将夹持件装设于抓持件回转部的状态,各自从基端侧沿装卸方向观看的图。于此,装卸方向是图6A中以箭头A1所示的将夹持件20插入抓持件回转部47的方向及其相反方向,扭转方向是图6B中以箭头A2所示的将夹持件20锁固于抓持件回转部47的方向及其相反方向。
(1)首先,如图6A所示,将夹持件20以箭头A1所示的脱卸方向插入抓持件回转部47。
此时,如图7A所示,将夹持件20绕沿装卸方向的轴线只扭转指定角度,使凸缘部(第二卡合部)24B配置为不干涉凸缘部(第一卡合部)47B。
再者,夹持臂件21通过手指等按压而为闭合状态,使夹持操作接受杆25绕支撑轴20J以箭头R11A所示的方向打开,相较于夹持臂作动杆36位于外侧。
而且,将安装轴套24A插入抓持件回转部47的装设孔47A,将夹持件20安装于抓持件回转部47。
(2)将夹持件20安装于抓持件回转部47后,如图6B所示,将夹持件20以箭头A2所示的方向扭转。
其结果,如图7B所示,夹持件20的凸缘部(第二卡合部)24B与抓持件回转部47的凸缘部(第一卡合部)47B叠合,不会在装卸方向上脱落。
而且,通过将夹持件20以箭头A2所示的方向进一步扭转,凸缘部(第二卡合部)24B的螺纹状的锥状面与凸缘部(第一卡合部)47B的螺纹状的锥状面更强力地螺合,轴向力变大。
其结果,确实地将夹持件20装设于抓持件回转部47。
(3)将夹持件20装设于抓持件回转部47后,如图6C所示,从夹持臂件21放开手指等,使左夹持臂件21L以箭头R21所示的一侧打开。
其结果,夹持操作接受杆25绕支撑轴20J以箭头R12A所示的方向回转并且与夹持臂作动杆36抵接,可以通过夹持臂作动杆36使夹持操作接受杆25作动。
接着,参照图8至图14B,说明夹持臂开闭驱动部(第一驱动部)30。
首先,参照图8至图10,说明夹持臂开闭驱动部30的概略构造。图8是说明关于第一实施例的夹持臂开闭驱动部30的概略构造的从侧面观看的纵向断面图,图9及图10是分别说明夹持臂开闭驱动部30及夹持臂回转驱动部40的详细主要部分的侧视图及斜视图。
在图8至图10中,附图标记31是夹持操作杆(夹持操作部)、附图标记32是夹持操作传达连接件、附图标记33是导引件、附图标记34是柔性传达件、附图标记35是轴向尺寸伸缩弹簧、附图标记36是夹持臂作动杆、附图标记37是夹持操作杆复位弹簧、附图标记38是夹持操作锁定机构。
夹持臂开闭驱动部(第一驱动部)30具有:夹持操作杆(夹持操作部)31,所述夹持操作杆(夹持操作部)31用于夹持操作一对的夹持臂件21;以及夹持操作传达部,所述夹持操作传达部从夹持操作杆31将夹持操作传达至一对的夹持臂件21;并且构成为通过夹持操作杆31输入的夹持操作而闭合(夹持)夹持部22。
具体而言,如图6至图8所示,夹持臂开闭驱动部(第一驱动部)30具备:夹持操作杆(夹持操作部)31、夹持操作传达连接件32、导引件33、柔性传达件34、夹持臂作动杆36、夹持操作杆复位弹簧37、以及夹持操作锁定机构38。在此实施例中,夹持操作解除机构与夹持操作锁定机构38为一体构成。
再者,夹持操作杆(夹持操作部)31、夹持操作传达连接件32、导引件33、柔性传达件34、及夹持臂作动杆36依序连接。
在此实施例中,操作传达部具备:夹持操作传达连接件32、导引件33、柔性传达件34、以及夹持臂作动杆36。
举例而言,夹持操作杆(夹持操作部)31具备:夹持杆本体311以及复位弹簧用杆312,并且形成为略呈L字形。再者,夹持操作杆31通过支撑轴31J受底板12支撑,并且可以绕支撑轴31J回转。
再者,使夹持杆本体311以箭头T11方向回转时,可以输入夹持操作。
再者,在夹持杆本体311的支撑轴31J的附近形成有圆弧状周面,在此圆弧状周面形成有动齿部(齿部)383S,所述动齿部(齿部)383S由段差组成,在以箭头T11方向回转时,所述段差激烈地位移。
举例而言,夹持操作传达连接件32形成为长圆平板状。
再者,夹持操作传达连接件32的第一端通过支撑销32J而可回转地连接于夹持操作杆31,夹持操作传达连接件32的第二端通过支撑销33J而可回转地连接于导引件33。
而且,从夹持操作杆31输入夹持操作时,支撑销33J侧朝向基端侧R移动,构成为将夹持操作传达至导引件33。
导引件33具备:导引件本体331及支架332。
导引件本体331从前端侧F朝向基端侧R形成有导引部33G,导引部33G配置为可以在底板12的导引沟12G滑动。
支架332通过支撑销33J连接于夹持操作传达连接件32,把从夹持操作杆31输入的夹持操作传达至导引件33。
其结果,导引件本体331通过从夹持操作杆31输入的夹持操作而沿着导引沟12G以箭头T111方向滑动。
举例而言,柔性传达件34的第一端通过支撑销34J而可回转地连接于导引件33的前端部,并且柔性传达件34的第二端连结于夹持臂作动杆36。而且,把从导引件33输入的夹持操作传达至夹持臂作动杆36。
再者,如图9所示,柔性传达件34具备:第一传达部341、第二传达部342、第三传达部343、第四传达部344、以及轴向尺寸伸缩弹簧35;在第一传达部341与第二传达部342之间配置轴向尺寸伸缩弹簧35。
再者,在此实施例中,举例而言,第二传达部342及第三传达部343配置为位于同一线上。
再者,举例而言,柔性传达件34通过钛合金的线状构件形成。
再者,可使用不锈钢(举例而言,SUS304/SUS304-CSP、SUS630等)、通过滚压或热处理等具有发条特性的耐腐蚀性金属代用钛合金,形成柔性传达件34。
再者,可以通过复数个相异的材质构成柔性传达件34。
在此实施例中,第一传达部341、第二传达部342、第三传达部343及第四传达部344是硬的构件,是通过轴向尺寸伸缩弹簧35在柔性传达件34的长边方向尺寸(第一传达部341及第四传达部344的轴向尺寸)伸缩的构造。
第一传达部341的第一端通过支撑销34J连接于导引件33的前端部,第一传达部341的第二端与轴向尺寸伸缩弹簧35的基端侧R接合。
再者,接合第一传达部341、轴向尺寸伸缩弹簧35、第二传达部342、第三传达部343及第四传达部344以构成柔性传达件34时,举例而言,优选地使用激光焊接。
第二传达部342的第一端与轴向尺寸伸缩弹簧35的前端侧F接合,第二传达部342的第二端与第三传达部343接合,构成为将夹持操作从轴向尺寸伸缩弹簧35传达至第三传达部343。
第三传达部343是长状的杆构件,第三传达部343的第一端与第二传达部342接合,并且第三传达部343的第二端与第四传达部344接合。而且,将第二传达部342的位移传达至第三传达部343。
第四传达部344的第一端侧与第三传达部343接合,在第一端侧形成单U型夹。而且,此单U型夹插入夹持臂作动杆36中,通过支撑轴36J而可回转地连接。
再者,如图9、图13A及图13B所示,举例而言,轴向尺寸伸缩弹簧35具备:第一端部351,所述第一端部351位于第一端侧;第二端部352,所述第二端部352位于第二端侧;绕组部(绕圈部)353,所述绕组部(绕圈部)353配置于第一端部351与第二端部352之间,是线状构件绕组(举例而言,一圈以上)而形成为侧面观看略呈圆形状;以及方向改变部354,所述方向改变部354在绕组部353与第二端部352之间使第二端部352的延伸方向改变。
再者,在此实施例中,举例而言,轴向尺寸伸缩弹簧35为通过钛合金的线状构件(举例而言,约
举例而言,第一端部351的第一端侧朝向基端侧R延伸并且连接于第一传达部341。再者,第一端部351的第二端侧连接于绕组部(绕圈部)353的第一端。
举例而言,沿轴线观看时,第二端部352相对于第一端部351配置于偏移位置,第二端部352的第一端侧通过方向改变部354连接于绕组部(绕圈部)353。
再者,第二端部352朝向第一端部351的相反侧延伸,第二端部352的第二端侧连接于第二传达部342。
举例而言,绕组部(绕圈部)353为通过钛合金的线状构件绕组(举例而言,一圈以上)形成。
举例而言,方向改变部354通过弯曲形状(或者折返形状)构成,使分别从绕组部(绕圈部)353沿绕圈方向延伸第一端部351及第二端部352偏移,并且使第一端部351及第二端部352彼此朝向相反方向延伸。
通过此构造,轴向尺寸伸缩弹簧35在第一端部351与第二端部352之间添加轴向的负载(拉伸方向、压缩方向)时,绕组部353形成的圆形状的直径收缩、扩大。
其结果,就算在第一端部351与第二端部352之间添加过大的负载,也可以吸收轴向尺寸伸缩弹簧35的轴向位移。
并且,绕组部353的绕组组数可以为复数组。
再者,绕组部353形成的圆形状不限于从侧面观看的情况,也可以配置为从上面观看时为绕圈。
再者,绕组部353不限定为正圆形状,也可以为长圆等。
举例而言,夹持臂作动杆36具备夹持动作输出杆361及输入杆362,在夹持动作输出杆361与输入杆362之间形成有轴承孔(未图示)。
再者,输入杆362形成为U字形的U型夹,此U字形的U型夹装设于柔性传达件34的第四传达部344的单U型夹,并且通过支撑轴36J而可回转地连接。
再者,形成于夹持臂作动杆36的轴承孔(未图示)、形成于夹持件金属配件16的圆筒部164的贯穿孔164H、及形成于保护管14的孔洞(未图示)叠合,通过将支撑轴37嵌设于这些孔洞,夹持臂作动杆36构成为可以绕平行于第一轴线O1的轴线O3回转。
而且,夹持臂作动杆36通过夹持操作而绕轴线O3回转,据此,是通过夹持动作输出杆361使左夹持臂件21L进行夹持动作的构造。
举例而言,夹持操作杆复位弹簧37通过线圈弹簧构成,夹持操作杆复位弹簧37的第一端通过支撑销37J连接于夹持操作杆31的复位弹簧用杆312,夹持操作杆复位弹簧37的第二端连接于抓握部112内的安装轴套112A。
而且,以与箭头T11方向相反的方向对夹持操作杆31施力。
并且,举例而言,可以使用卷簧或扭簧等代用夹持操作杆复位弹簧37。
接着,参照图11,说明夹持操作锁定机构。
图11描绘关于第一实施例的夹持臂开闭驱动部的夹持操作锁定机构的概略构造的从侧面观看的概略构造图。在图11中,附图标记381是锁定机构驱动销、附图标记382是棘轮驱动凸轮、附图标记383是棘轮杆、附图标记384是棘轮杆施力弹簧。
如图11所示,举例而言,夹持操作锁定机构38具备:锁定机构驱动销381、棘轮驱动凸轮382、棘轮杆383、以及棘轮杆施力弹簧384。
而且,通过从夹持操作杆(夹持操作部)31输入的夹持操作将动作(位移)卡止至指定位置,构成为通过夹持部22保持对象物的夹持状态。
举例而言,锁定机构驱动销381由直立设置于夹持操作杆31的销组成,是通过夹持操作配合夹持操作杆31的回转而绕支撑轴31J绕圈的构造。
如图11所示,举例而言,棘轮驱动凸轮382形成为外形略呈五角形的平板状,并且具备:直立设置于一个顶角附近的支撑轴382J、驱动销接受凹部382U、以及棘轮卡止凸部382C。
而且,可以绕支撑轴382J回转(摆动)。
如图11所示,驱动销接受凹部382U位于支撑轴382J的对边,举例而言,由凹部组成,所述凹部通过比锁定机构驱动销381的直径还大的尺寸的宽度形成,相对于锁定机构驱动销381具有游隙。
其结果,棘轮驱动凸轮382除了受锁定机构驱动销381按压时,棘轮驱动凸轮382自由地绕支撑轴382J回转(摆动)。
棘轮卡止凸部382C位于棘轮驱动凸轮382的棘轮杆383侧,顶部形成为略呈半圆形突出。
举例而言,棘轮杆383由略呈L字形的平板组成,并且具备:支撑轴383J,所述支撑轴383J直立设置于L字形的其中一边的端部附近;平坦部383F,所述平坦部383F形成于L字形的另一边的棘轮驱动凸轮382侧的周缘部;圆弧状的棘轮卡止凹部383U,所述棘轮卡止凹部383U形成于平坦部383F之中;以及棘轮爪部(卡止爪部)383T,所述棘轮爪部(卡止爪部)383T形成于L字形的另一边的前端侧。
而且,棘轮杆383构成为绕支撑轴383J回转(摆动)。
再者,棘轮爪部(卡止爪部)383T是与夹持操作杆31的回转齿部(齿部)383S对应的构造。
而且,通过棘轮爪部(卡止爪部)383T与回转齿部(齿部)383S抓合并卡合,夹持操作杆31无法在与夹持操作杆复位弹簧37的拉伸方向T37对应的方向(在图11中,以箭头T12所示的方向)上回转。其结果,保持夹持部22的夹持状态(闭合状态)。
另一方面,若棘轮爪部(卡止爪部)383T与回转齿部(齿部)383S的卡合脱离时,夹持部22的夹持状态(闭合状态)解除,并且夹持操作杆31以箭头T12方向复位。
举例而言,棘轮杆施力弹簧384通过扭簧构成。
而且,棘轮杆施力弹簧384轴支承于支撑轴383J,并且受从底板直立设置的支撑销384A及从棘轮杆383直立设置的支撑销384B支撑,构成为对棘轮杆383施力,使棘轮爪部(卡止爪部)383T位于回转齿部(齿部)383S侧。
接着,参照图12A至图13B,说明夹持臂开闭驱动部30及夹持操作锁定机构38的作用。
图12A至图12B是说明关于第一实施例的夹持臂开闭驱动部及夹持操作锁定机构的作用的图,图12A描绘夹持操作开始前的状态,图12B描绘夹持操作结束时的状态。再者,图13A是描绘将夹持臂件打开状态下的轴向尺寸伸缩弹簧的概略构造图,图13B是描绘将夹持臂件闭合状态下的轴向尺寸伸缩弹簧的概略构造图。
<夹持操作>
(1)首先,在未进行夹持操作的状态下,夹持操作杆31以图12A所示的支撑轴31J为中心位于圆周方向位置。
此时,锁定机构驱动销381在棘轮驱动凸轮382的驱动销接受凹部382U内是自由的状态,棘轮卡止凸部382C未与棘轮卡止凹部383U卡合。再者,棘轮爪部(卡止爪部)383T未与回转齿部(齿部)383S卡合,并且位于夹持操作杆31的圆周面上。
此时,如图13A所示,轴向尺寸伸缩弹簧35为未输入夹持操作的状态,并且在第一端部351与第一端部352之间未添加负载(拉伸力)。
此情况下,绕组部(绕圈部)353是自由的状态,绕组部353形成的圆形状为大的直径。其结果,第一传达部341及第二传达部342在彼此接近的位置,夹持臂件21为夹持部22打开的状态。
(2)接着,如图12A所示,为了夹持操作,使夹持操作杆31以箭头T11方向回转。
使夹持操作杆31以箭头T11方向回转,如图12B所示,锁定机构驱动销381与驱动销接受凹部382U抵接,棘轮驱动凸轮382以箭头R382方向回转。
棘轮驱动凸轮382以箭头R382方向回转后,棘轮卡止凸部382C使棘轮杆383以箭头R383方向回转,并且棘轮卡止凸部38C与棘轮卡止凹部383U卡合,使棘轮杆383停在指定的圆周方向位置。
再者,棘轮卡止凸部38C与棘轮卡止凹部383U卡合时,棘轮杆383通过棘轮杆施力弹簧384以箭头R383方向的相反方向些微地回转,棘轮爪部(卡止爪部)383T与回转齿部(齿部)383S卡合,将夹持操作杆31锁定。
导引件33以箭头T111方向移动并且通过第一传达部341输入夹持操作时,如图13B所示,轴向尺寸伸缩弹簧35的绕组部353形成的圆形状直径缩小,朝向基端侧R对第二传达部342施力。而且,此施力通过第三传达部343及第四传达部344传达至夹持臂作动杆36,左夹持臂件21为闭合状态。
此时,通过绕组部353形成的圆形状直径缩小,轴向尺寸伸缩弹簧3抑制通过从夹持操作杆31至夹持臂件21的夹持操作施加过大的力量。
接着,参照图14A及图14B,说明夹持操作的解除。
图14A及图14B是说明关于第一实施例的夹持操作锁定机构的解除的图,图14A是描绘夹持操作锁定机构的解除开始时的状态的概略构造图,图14B是描绘夹持操作锁定机构解除后的状态的概略构造图。
<夹持解除操作>
(1)首先,如图14A所示,使夹持操作杆31以箭头T11方向些微地回转。
使夹持操作杆31以箭头T11方向些微地回转后,锁定机构驱动销381以箭头R381所示的方向回转,棘轮驱动凸轮382以箭头R382方向回转。其结果,棘轮卡止凸部38C从驱动销接受凹部382U以箭头R382方向脱离,使棘轮杆383以箭头R383方向回转。
其结果,棘轮爪部(卡止爪部)383T与回转齿部(齿部)383S的卡合解除。
(2)棘轮爪部(卡止爪部)383T与回转齿部(齿部)383S的卡合解除时,如图14B所示,锁定机构驱动销381与驱动销接受凹部382U抵接并且以箭头R381A方向回转。
再者,夹持操作杆31通过夹持操作复位弹簧37的拉伸方向T37,以箭头T12方向回转并复位至原位置。
接着,参照图7、图8、图15及图16,说明夹持臂回转驱动部。
图15是说明关于第一实施例的夹持臂回转驱动部的概略构造的从侧面观看的纵向断面图,图16是说明所述夹持臂回转驱动部的作用的从侧面观看的概略构造图。在图15及图16中,附图标记40是夹持臂回转驱动部(第二驱动部),附图标记41是回转操作轮(回转操作部)、附图标记42是回转操作传达连接件、附图标记43是回转控制凸轮、附图标记44是传达连接件、附图标记45是第一传达杆、附图标记46是第二传达杆、附图标记47是抓持件回转部。
如图15、图7及图8所示,举例而言,夹持臂回转驱动部(第二驱动部)40具备:回转操作轮(回转操作部)41、回转操作传达连接件42、回转控制凸轮43、传达连接件44、第一传达件45、第二传达件46、以及通过回转操作使夹持臂件21绕第二轴线O2回转的抓持件回转部47。
回转操作轮(回转操作部)41具备:形成为圆弧状的轮本体部411、以及形成于轮本体部411的第一端的杆部412。
回转操作轮41受支撑轴41J支撑,并且可以绕支撑轴41J回转。再者,在轮本体部411的外周装设有手指接受件,构成为手指容易抓合。
而且,轮本体部411是通过回转操作而绕支撑轴41J以箭头T21及箭头T22方向回转的构造。
回转操作传达连接件42通过长状的平板构成,在略呈符号「<」而于中央部弯曲。
再者,回转操作传达连接件42通过支撑销42J而可互相绕支撑销42J回转地连接于回转操作轮41的杆部412的外周部。
再者,回转操作传达连接件42通过支撑轴43J而可互相绕支撑轴43J回转地连接于回转控制凸轮43的外周部。
而且,构成为把从回转操作轮41输入的回转操作传达至回转控制凸轮43。
回转控制凸轮43形成为略呈圆板状,通过支撑轴430而可回转地受底板12支撑。
再者,回转控制凸轮43在外周部配置有:支撑轴43J、支撑轴441J及支撑轴442J。
再者,支撑轴441J及支撑轴442J配置为夹着支撑轴43J而在圆周方向上约相隔90°。
而且,回转控制凸轮43通过回转操作传达连接件42因为从回转操作轮41输入的回转操作而绕支撑轴430J回转,构成为将回转操作传达至传达连接件44。具体而言,回转操作轮41以箭头T21方向回转时,回转控制凸轮43以箭头T211方向回转,回转操作轮41以箭头T22方向回转时,回转控制凸轮43以箭头T221方向回转。
传达连接件44具备第一传达连接件441以及第二传达连接件442。
从侧面观看时,第一传达连接件441及第二传达连接件442配置为第一传达连接件441位于第二传达连接件442的上方。
第一传达连接件441通过长圆形状的平板构成。再者,第一传达连接件441的第一端通过支撑轴441J而可回转地连接于回转控制凸轮43,第一传达连接件441的第二端通过支撑轴45J而可回转地连接于第一传达件45。
而且,第一传达连接件441将回转操作从回转控制凸轮43传达至第一传达件45。
第二传达连接件442通过长圆形状的平板构成。再者,第二传达连接件442的第一端通过支撑轴442J而可回转地连接于回转控制凸轮43,第二传达连接件442的第二端通过支撑轴46J而可回转地连接于第二传达件46。
而且,第二传达连接件442将回转操作从回转控制凸轮43传达至第二传达件46。
第一传达件45具备:第一构件451、第二构件452、第三构件453、以及第四构件454;第一构件451、第二构件452、第三构件453、及第四构件454从基端侧R朝向前端侧F依序配置。
第一构件451的第一端通过支撑轴45J而可回转地连接于第一传达连接件441,第一构件451的第二端(前端侧F)的外周形成有外螺纹。
第三构件453的第一端(基端侧R)的外周形成有外螺纹,第三构件453的第二端连接于第四构件454。并且,第三构件453的外螺纹形成为与第一构件451的外螺纹呈相反方向(反向螺纹)。
举例而言,第二构件452形成为圆筒状,并且通过螺旋扣(turnbuckle)构成,所述螺旋扣的内部形成有与第一构件451的外螺纹及第三构件453的外螺纹对应的内螺纹。
而且,通过使第二构件452绕其轴线回转,第一构件451与第三构件453接近或远离,构成为可以调整第一传达件45的长度。
并且,可任意设定第二构件45是否为螺旋扣等的长度调整构件,也可以为不具有长度调整功能的构造。
举例而言,第四构件454具备:与抓持件回转部47可回转地连接的传达销部454J,是把从第三构件453传达来的的回转操作传达至抓持件回转部47的构造。
在此实施例中,传达销部454J通过沿第二轴线O2呈长状形成的针状轴承等构成,从保护管14的左右的中央部偏移并且连接于抓持件回转部47。
其结果,抑制因为保护管14的高度方向尺寸低于宽度方向周边部的影响。
第二传达件46具备:第一构件461、第二构件462、第三构件463、以及第四构件464;第一构件461、第二构件462、第三构件463、及第四构件464从基端侧R朝向前端侧F依序配置。
第一构件461的第一端通过支撑轴46J而可回转地连接于第二传达连接件442,第一构件461的第二端(前端侧F)的外周形成有外螺纹。
第三构件463的第一端(基端侧R)的外周形成有外螺纹,第三构件463的第二端连接于第四构件464。并且,第三构件463的外螺纹形成为与第一构件461的外螺纹呈相反方向(反向螺纹)。
举例而言,第二构件462形成为圆筒状,并且通过螺旋扣构成,所述螺旋扣的内部形成有与第一构件461的外螺纹及第三构件463的外螺纹对应的内螺纹。
而且,通过使第二构件462回转,第一构件461与第三构件463接近或远离,构成为可以调整第二传达件46的长度。
并且,可任意设定第二构件46是否为螺旋扣等的长度调整构件,也可以为不具有长度调整功能的构造。
举例而言,第四构件464具备:与抓持件回转部47可回转地连接的传达销部454J,是把从第三构件463传达来的的回转操作传达至抓持件回转部47的构造。
在此实施例中,传达销部464J通过沿第二轴线O2呈长状形成的针状轴承等构成,从保护管14的左右的中央部偏移并且连接于抓持件回转部47。
如上所述,抓持件回转部47具备:基板部471、从基板部471的左端延伸的第一支撑壁部472、从基板部471的右端延伸的第二支撑壁部473、以及形成于第二支撑壁部473的回转控制凹部474,在第一支撑壁部472及第二支撑壁部473同轴地形成有回转轴承孔47H。
举例而言,在第二支撑壁部473的外周形成有两个回转控制凹部474。
而且,各回转控制凹部474可回转地与第四构件454的传达销部454J及第四构件464的传达销部464J卡合。
在第四构件454的传达销部454J及第四构件464的传达销部464J的前端侧F的端部,在与传达销部454J及传达销部464J的长轴呈直角的方向上接合圆筒形状的销,此销构成为与回转控制凹部474咬合。
再者,在第一支撑壁部472与第二支撑壁部473之间形成有:配置夹持臂作动杆36的凹部47U。
再者,抓持件回转部47配置于夹持件金属配件16的凹部16U,并且,形成于夹持件金属配件16的第一支撑壁部162的回转轴承孔16H与形成于抓持件回转部47的第一支撑壁部472的回转轴承孔47H叠合,通过嵌插回转支撑轴47J,与夹持件金属配件16可绕第二轴线O2回转地连结。
同样地,形成于第二支撑壁部163的回转轴承孔16H与形成于第二支撑壁部473的回转轴承孔47H叠合,通过嵌插回转支撑轴47J,与夹持件金属配件16可绕第二轴线O2回转地连结。
其结果,如图16所示,回转操作轮41以箭头T21方向回转时,第一传达件45以箭头T212A方向移动,第二传达件46以箭头T212B方向移动,夹持臂件21以箭头R21方向回转,使抓持件回转部47回转。
再者,回转操作轮41以箭头T22方向回转时,第一传达件45以箭头T222A方向移动,第二传达件46以箭头T222B方向移动,夹持臂件21以箭头R22方向回转,使抓持件回转部47回转。
接着,参照图17A至图17D,说明通过持针器100的缝合针110的运针。图17A至图17D是说明关于第一实施例的持针器的作用的其一例示的图,图17A是描绘通过夹持臂件21夹持缝合针的状态的图,图17B是描绘将缝合针穿刺第一生体组织的状态的图,图17C是描绘缝合第一生体组织与第二生体组织的状态的图,图17D是描绘缝合后替换缝合针的状态的图。在图式中,附图标记110是缝合针,附图标记110T是缝合线、附图标记S1是首先穿刺的第一生体组织、附图标记S2是第二生体组织。
并且,举例而言,第一生体组织S1及第二生体组织S2相当于血管等。
(1)首先,如图17A所示,使左夹持臂件21L以箭头R1方向回转,通过夹持臂件21夹持缝合针110。
而且,举例而言,夹持臂件21以箭头R22方向回转。
(2)接着,如图17B所示,使第一生体组织S1及第二生体组织S2的端部彼此接近。而且,移动夹持臂件21,使缝合针110位于第一生体组织S1的端部附近。
而且,夹持臂件21以箭头R21方向回转,并且以缝合针110运针,以缝合针110穿刺第一生体组织S1。
可以根据运针的状况适当地调整持针器100相对于第一生体组织S1的摆位及位置。
(3)再来,如图17C所示,使第一生体组织S1及第二生体组织S2的端部彼此接上。而且,使缝合针110穿过第一生体组织S1,并且从第一生体组织S1朝向第二生体组织S2以缝合针110运针。
(4)再来,如图17D所示,缝合针110穿过第一生体组织S1及第二生体组织S2,缝合针110的前端部从第二生体组织S2突出后,暂时打开夹持臂件21,并且从夹持臂件21释放缝合针110。
而且,再次夹持缝合针110的前端侧,并且将缝合针110从第二生体组织S2拔出,通过缝合线110T连接第一生体组织S1及第二生体组织S2。
重复上述从(1)到(4)的动作,将第一生体组织S1及第二生体组织S2的端部彼此缝合。
根据关于第一实施例的持针器100,操作者通过夹持臂开闭驱动部(第一驱动部)30利用夹持臂件21进行夹持操作,可以闭合夹持部22并且抓持缝合针110。再者,通过夹持臂回转驱动部(第二驱动部)40,可以使夹持部22绕第二轴线O2回转并且垂直运针(或改变对象物的摆位)。
再者,夹持臂开闭驱动部(第一驱动部)30具备轴向尺寸伸缩弹簧35,在夹持操作的情况下,因为通过轴向尺寸伸缩弹簧35朝向夹持部22闭合侧对于一对的夹持臂件21施力,因此在夹持缝合针等的对象物时,抑制夹持部22产生游隙,可以确实地夹持。
其结果,操作者可以容易且有效地操作,并且提升夹持缝合针110时候的信赖度。
再者,因为夹持操作通过轴向尺寸伸缩弹簧35传达至夹持部22,就算在夹持操作输入部施加较大负重,也会缓和地传达,不会将此负重直接传达至夹持部22,因此,抑制对于缝合针110产生损害。
再者,因为通过夹持臂开闭驱动部(第一驱动部)30将较大的力量缓和地传达至夹持部22,因此抑制对构成夹持臂开闭驱动部30的构件产生损害,抑制持针器100的信赖度下降,并且可以长期使用。
根据关于第一实施例的持针器100,因为夹持操作位移吸收单元通过配置于柔性传达件34的轴向尺寸伸缩弹簧35构成,通过简单的构造,可以有效地将夹持操作传达力转换为对于夹持臂件21闭合侧的施力。
再者,根据关于第一实施例的持针器100,因为夹持部22形成有与缝合针110对应的缝合针夹持凹部23,因此可以容易且稳定地抓持缝合针110。
其结果,在狭小空间中,可以稳定地抓持缝合针110,并且有效且稳定地运针。
根据关于第一实施例的夹持件20,可以容易且有效地装卸于持针器本体10。
其结果,可以使夹持件20为抛弃式,在手术时提高卫生上的安全性。
<第二实施例>
以下参照图18至图22,说明本发明的第二实施例。
图18是说明关于本发明的第二实施例的持针器的概略构造的从侧面观看的纵向断面图,图19是说明夹持臂回转驱动部的概略构造的从侧面观看的纵向断面图,图20是说明夹持臂开闭驱动部的概略构造的从侧面观看的纵向断面图,图21是说明夹持臂开闭驱动部及夹持臂回转驱动部的详细主要部分的侧视图,图22A是说明夹持臂开闭驱动部的作用的描绘将夹持臂件打开状态下的S字形弹簧的概略构造图,图22B是描绘将夹持臂件闭合状态下的S字形弹簧的概略构造图。
在图式中,附图标记200是持针器(抓持器)、附图标记230是夹持臂开闭驱动部(第一驱动部)、附图标记234是柔性传达件、附图标记235是S字形弹簧(轴向尺寸伸缩弹簧)。
如图18及图19所示,持针器(抓持器)200具备:持针器本体(抓持器本体)10、夹持件(抓持件)20、夹持臂开闭驱动部(第一驱动部)230、以及夹持臂回转驱动部(第二驱动部)40。
而且,持针器(抓持器)200构成为,夹持臂件21绕第一轴线O1回转并且夹持缝合针(对象物),并且夹持件20绕第二轴线O2回转并且使缝合针(对象物)可以在沿垂直接线方向(持针器200的长边方向)的平面内运针。
关于持针器本体(抓持器本体)10、夹持件(抓持件)20、及夹持臂回转驱动部(第二驱动部)40,因为与第一实施例相同,因此以相同附图标记标记,并且省略说明。
并且,持针器200亦可以使用作为抓持器,所述抓持器抓持替代缝合针而作为对象物的生体组织(包含其一部分)或穿孔器具、切开器具等。
以下参照图20至图22B,说明夹持臂开闭驱动部(第一驱动部)230。
图20是说明关于第二实施例的夹持臂开闭驱动部的概略构造的从侧面观看的纵向断面图。
夹持臂开闭驱动部(第一驱动部)230具有:夹持操作杆(夹持操作部)31,所述夹持操作杆(夹持操作部)31用于夹持操作一对的夹持臂件21;以及夹持操作传达部,所述夹持操作传达部从夹持操作杆31将夹持操作传达至一对的夹持臂件21;并且构成为通过夹持操作杆31输入的夹持操作而闭合(夹持)夹持部22。
具体而言,如图20所示,夹持臂开闭驱动部230具备:夹持操作杆(夹持操作部)31、夹持操作传达连接件32、导引件33、柔性传达件234、夹持臂作动杆36、夹持操作杆复位弹簧37、以及夹持操作锁定机构38。
再者,夹持操作杆(夹持操作部)31、夹持操作传达连接件32、导引件33、柔性传达件234、夹持臂作动杆36依序连接。
再者,如图20所示,柔性传达件234具备:第一传达部341、第二传达部342、第三传达部343、第四传达部344、以及S字形弹簧(轴向尺寸伸缩弹簧)235;第一传达部341与第二传达部342之间配置S字形弹簧235。
而且,通过S字形弹簧235,柔性传达件234的长边方向尺寸(第一传达部341及第四传达部344的轴向尺寸)是伸缩的构造。
关于第一传达部341、第二传达部342、第三传达部343、及第四传达部344的构造及材料,因为与第一实施例相同,因此以相同附图标记标记,并且省略说明。
举例而言,S字形弹簧(轴向尺寸伸缩弹簧)235通过带状的钛合金构成,从侧面观看时,形成为:具有两个互相在相反方向弯曲的弯曲部的S字形。
再者,如图21、图21A、图21B所示,举例而言,S字形弹簧(轴向尺寸伸缩弹簧)235具备:位于第一端侧的第一端部2351、位于第二端侧的第二端部2352、配置于第一端部2351与第二端部2352之间的第一弯曲部2353、以及第四弯曲部2354。
举例而言,第一端部2351的第一端侧朝向基端侧R延伸,并且连接于第一传达部341。
再者,第一端部2351的第二端侧连接于第一弯曲部2353的第一端侧。
举例而言,沿轴线观看时,第二端部2352相对于第一端部2351配置为偏移位置,第二端部2352的第一端侧连接于第二弯曲部2354的第二端(前端侧F)。
再者,第二端部2352朝向第一端部2351的相反侧(基端侧R)延伸,并且,第二端部2352的第二端侧连接于位于前端侧F的第二传达部342。
第一弯曲部2353形成为朝向前端侧F突出的弯曲状,并且第一弯曲部2353的第一端侧连接于第一端部2351。
第二弯曲部2354形成为朝向基端侧R突出的弯曲状,并且第二弯曲部2354的第二端侧连接于第二端部2352。
再者,第一弯曲部2353的第二端侧(与第一端部2351为相反侧的端部)及第二弯曲部2354的第二端侧(与第二端部2352为相反侧的端部)同轴连接。
在此实施例中,第一弯曲部2353及第二弯曲部2354以突出的方向互相相反的方式上下排列,配置为略呈S字形。
举例而言,沿轴向观看第一端部2351及第二端部2352时,第一弯曲部2353及第二弯曲部2354偏离,并且第一端部2351及第二端部2352互相朝向相反方向延伸。
S字形弹簧(轴向尺寸伸缩弹簧)235通过所述构造,在第一端部2351与第二端部2352之间添加轴向的负载(拉伸方向、压缩方向)时,第一弯曲部2353及第二弯曲部2354的曲率缩小、扩大。
再者,第一弯曲部2353及第二弯曲部2354不限于从侧面观看时呈弯曲的情况,也可以配置为从上面观看时呈弯曲。
接着,参照图22A及图22B,说明夹持臂开闭驱动部230的作用。
并且,图22A是描绘将夹持臂件打开状态下的S字形弹簧的概略构造图,图22B是描绘将夹持臂件闭合状态下的S字形弹簧的概略构造图。
<夹持操作>
因为未进行夹持操作的状态下的锁定机构驱动销381与第一实施例相同,因此省略说明。
(1)如图22A所示,未进行夹持操作的状态下,S字形弹簧235为弯曲部的曲率较大(曲率半径较小)的S字形,其结果,第一传达部341及第二传达部342在彼此接近的位置,夹持臂件21为夹持部22打开的状态。
(2)接着,为了夹持操作,使夹持操作杆31以箭头T11方向回转,导引件33以箭头T111方向移动,通过第一传达部341输入夹持操作时,如图22B所示,S字形弹簧235的弯曲部的曲率变小,朝向基端侧R对第二传达部342施力。
而且,此施力通过第三传达部343及第四传达部344传达至夹持臂作动杆36,左夹持臂件21L变为闭合状态,可以抓持缝合针等的对象物。
此时,S字形弹簧(轴向尺寸伸缩弹簧)235为,第一弯曲部2353及第二弯曲部2354的曲率扩大,其结果,就算在第一弯曲部2353及第二弯曲部2354之间添加过大的负载,也可以吸收S字形弹簧235的轴向位移。
根据关于第二实施例的持针器200,操作者通过夹持臂开闭驱动部(第一驱动部)230利用夹持臂件21进行夹持操作,可以闭合夹持部22并且抓持缝合针。再者,通过夹持臂回转驱动部(第二驱动部)40,可以使夹持部22绕第二轴线O2回转并且垂直运针(或改变对象物的摆位)。
再者,夹持臂开闭驱动部(第一驱动部)230具备S字形弹簧235,在夹持操作的情况下,因为通过S字形弹簧235朝向夹持部22闭合侧对于一对的夹持臂件21施力,在夹持缝合针等的对象物时,抑制夹持部22产生游隙,可以确实地夹持。
其结果,操作者可以容易且有效地操作,并且提升夹持缝合针110时候的信赖度。
再者,因为夹持操作通过S字形弹簧235传达至夹持部22,因此就算在夹持操作输入部施加较大负重,也会缓和地传达,不会将此负重直接传达至夹持部22,因此,抑制对于缝合针110产生损害。
再者,因为通过夹持臂开闭驱动部(第一驱动部)230将较大的力量缓和地传达至夹持部22,因此抑制对构成夹持臂开闭驱动部230的构件产生损害,抑制持针器200的信赖度下降,并且可以长期使用。
根据关于第一实施例的持针器200,因为夹持操作位移吸收单元通过配置于柔性传达件234的S字形弹簧235构成,因此通过简单的构造,可以有效地将夹持操作传达力转换为对于夹持臂件21闭合侧的施力。
<第三实施例>
以下参照图23、图24A至图24C,说明关于本发明的第三实施例的抓持器的其一例示。
图23是说明关于本发明的第三实施例的抓持器的概略构造的从侧面观看的纵向断面。再者,图23A至图23C是说明钳件的概略构造的图,图23A是从侧面观看钳件的概略构造图,图23B是平面视角的概略构造图,图23C是从基端侧观看的概略构造图。
在图式中,附图标记300是抓持器、附图标记320是钳件(抓持件)。
如图23所示,举例而言,抓持器300具备:抓持器本体10、钳件(夹持件、抓持件)320、夹持臂开闭驱动部(第一驱动部)30、以及夹持臂回转驱动部(第二驱动部)40。
关于第三实施例的抓持器300与关于第一实施例的持针器100的差异在于,代用夹持件(抓持件)20而具备钳件320,因为其他皆与第一实施例相同,因此省略说明。
如图24A至图24C所示,举例而言,钳件(夹持件、抓持件)320具备:夹持臂件321、夹持臂保持部24、夹持操作接受杆25、复位弹簧(夹持臂复位单元)26、以及支撑轴20J。
举例而言,夹持臂件321具备左夹持臂件321L以及右夹持臂件321R。
而且,如图24A所示,举例而言,夹持臂件321形成为从基端侧R朝向前端侧F渐细,并且是些微地朝向上方弯曲的弯曲形状部。
举例而言,夹持臂件321的全长(长边方向的尺寸)形成为30mm。再者,举例而言,从左夹持臂件321的前端至第一轴线O1(支撑轴20J的中心)的尺寸设定为22mm。
左夹持臂件321L的基端侧R连接于夹持操作接受杆25,左夹持臂件321L与夹持操作接受杆25之间在长边方向上形成有回转轴承孔(未图示)。
右夹持臂件321R构成固定夹持臂件,左夹持臂件321L构成可动夹持臂件。
而且,通过左夹持臂件321L绕第一轴线O1回转,夹持凸部322L及夹持凸部322R接近或远离,以夹持对象物。
而且,左夹持臂件321L以及右夹持臂件321R可以绕第一轴线O1相对地回转。
再者,夹持臂件321在长边方向的前端侧F形成有夹持凸部322。
夹持凸部322具备夹持凸部322L(夹持部)以及夹持凸部(夹持部)322R。再者,夹持凸部322L及夹持凸部322R形成为,在长边方向(从基端侧R至前端侧F)上彼此相互交错。
而且,夹持凸部322L及夹持凸部322R是彼此接近以夹持对象物的构造,夹持凸部322L及夹持凸部322R是彼此远离以放开对象物的构造。
举例而言,邻接的夹持凸部(夹持部)322L与夹持凸部(夹持部)322L之间,在与长边方向交叉(举例而言,正交)的方向上,形成有V字状的夹持凹部323L(323)。
再者,举例而言,邻接的夹持凸部(夹持部)322R与夹持凸部(夹持部)322R之间,在与长边方向交叉(举例而言,正交)的方向上,形成有V字状的夹持凹部323R(323)。
在此实施例中,夹持凹部323L、323R(323)形成为与夹持凸部322L、322R(323)互补。
关于夹持臂保持部24、夹持操作接受杆25、复位弹簧(夹持臂复位单元)26及支撑轴20J的构造,因为与第一实施例相同,因此以相同附图标记标记,并且省略说明。
并且,举例而言,钳件320可以为不具备夹持凸部322或夹持凹部323的构造。
再者,可以任意地设定钳件(夹持件)320的构造、尺寸。
接着,参照图25A及图25B,说明抓持器300的使用方法的其一例示。
图25A及图25B是说明适用关于第三实施例的钳件320的抓持器300的作用的其一例示的图,举例而言,是在腹腔内改变位于生体组织Y1及Y2内部侧的血管Y3的摆位并进行处置的情况的示意图。
在图25A及图25B中,附图标记120是在腹腔手术中用于将抓持器300插入腹腔内的穿刺套筒。
(1)首先,如图25A所示,通过穿刺套筒120将抓持器300的前端侧插入腹腔内,使钳件320位于生体组织(举例而言,脏器)Y1及Y2的内部侧。此时,优选地,使一对的夹持臂件321以闭合状态移动。
(2)接着,解除夹持操作锁定机构(未图示),使夹持臂件321为打开状态。
其后,如图25A所示,以箭头T22方向操作回转操作轮41,使夹持臂件以箭头R22方向回转,并且使夹持臂件321位于血管Y3的附近。
(3)再来,如图25A所示,以箭头T11方向操作夹持操作杆(夹持操作部)31,闭合夹持臂件21以抓持血管Y3。
闭合夹持臂件21以抓持血管Y3后,夹持操作锁定机构(未图示)作动,保持夹持臂件321的闭合状态。
(4)再来,如图25B所示,以箭头T21方向操作回转操作轮(回转操作部)41,在夹持血管Y3的状态下,使夹持臂件321以箭头R21方向回转,改变血管Y3的方向。其后,接续地进行所希望的处置。
根据关于第三实施例的抓持器300,因为钳件320的夹持臂件321朝向前端侧弯曲,举例而言,可以容易地抓持以血管Y3等为首的生体的一部分或生体组织的抓持对象物。
再者,根据抓持器300,可以在狭窄空间内容易且有效地改变血管Y3的抓持对象物的位置或摆位。
再者,根据抓持器300,举例而言,在抓持血管Y3等的抓持对象物时,可以抑制抓持力变得过大,抑制血管Y3等的损伤。
<第四实施例>
以下参照图26A至图26C,说明关于本发明的第四实施例的钳件的其一例示。
图26A至图26C是说明关于本发明的第四实施例的钳件的概略构造的图,图26A是从侧面观看钳件的概略构造图,图26B是平面视角的概略构造图,图26C是从基端侧观看的概略构造图。
在图式中,附图标记420是钳件(抓持件)。
如图26A至图26C所示,举例而言,钳件(夹持件、抓持件)420具备:夹持臂件421、夹持臂保持部24、夹持操作接受杆25、复位弹簧(夹持臂复位单元)26以及支撑轴20J。
举例而言,夹持臂件421具备左夹持臂件421L以及右夹持臂件421R。
再者,如图24A所示,举例而言,夹持臂件421形成为从基端侧R朝向前端侧F渐细,并且形成为与关于第三实施例的夹持臂件321相比曲率较大的弯曲形状部。
举例而言,夹持臂件421的全长(长边方向的尺寸)形成为23.4mm。再者,举例而言,从左夹持臂件421的前端至第一轴线O1(支撑轴20J的中心)的距离设定为15.4mm。
在夹持臂件421(421L及421R)上,形成有夹持凸部422(422L及422R)及夹持凹部423(423L及423R)。
因为夹持凸部422(422L及422R)及夹持凹部423(423L及423R)与第三实施例中的夹持凸部322(322L及322R)及夹持凹部323(323L及323R)相同,因此省略说明。
再者,关于夹持臂保持部24、夹持操作接受杆25、复位弹簧(夹持臂复位单元)26及支撑轴20J的构造,因为与第一实施例相同,因此以相同附图标记标记,并且省略说明。
并且,可以任意地设定钳件(夹持件)420的构造及尺寸。
并且,本发明并不限于上述的实施例,在不脱离发明主旨的范围内,可以进行各种改变。
举例而言,在上述实施例中,虽然说明了夹持臂开闭驱动部(第一驱动部)30、230具备:夹持操作杆31;夹持操作传达连接件32;导引件33;柔性传达件34、234;夹持臂作动杆36;夹持操作杆复位弹簧37;以及夹持操作锁定机构38的情况,但是,可以任意地设定夹持臂开闭驱动部30、230的构造,也可以是通过其他构造的第一驱动部以夹持件(夹持构件)20或钳件(夹持构件)320(420)进行夹持操作的构造。
再者,可以任意地设定夹持操作部的构造,可以构成为通过杆件等代用回转操作轮。
再者,在上述实施例中,虽然说明了通过钛合金形成柔性传达件34、234的情况,但是,可以适当地设定柔性传达件34、234的构造及材质,举例而言,可以通过钛合金以外的材料构成。
再者,在上述实施例中,虽然说明了夹持操作位移吸收单元配置于柔性传达件34、234的情况,但是,可以任意地设定夹持操作位移吸收单元的构造及配置位置,举例而言,可以配置为与柔性传达件34、234分离。
再者,在上述实施例中,虽然说明了夹持操作位移吸收单元通过具备绕组部(绕圈部)353的轴向尺寸伸缩弹簧35、S字形弹簧235构成的情况,但是,可以使用通过空气弹簧或卷簧构成的其他形式的轴向尺寸伸缩弹簧。
再者,在上述实施例中,虽然说明了持针器100、200、抓持器300具备夹持操作锁定机构38,并且通过夹持操作锁定机构38可以锁定及解除夹持臂件21的夹持状态的情况,但是,可以任意地设定是否具备夹持操作锁定机构38,也可以是夹持操作锁定机构38仅进行夹持状态的锁定的构造。再者,可以适当地设定夹持操作锁定机构的构造。
再者,虽然说明了夹持操作锁定机构38具有将夹持操作以一阶段停止的棘轮383T、383T的情况,但是,也可以是将夹持臂件21停止在复数个位置的构造。
再者,在上述实施例中,虽然说明了夹持臂回转驱动部(第二驱动部)40具备:回转操作轮(夹持操作输入部)41、回转操作传达连接件42、回转控制凸轮43、传达连接件44、第一传达件45、第二传达件46、以及抓持件回转部47的情况,但是,举例而言,可以任意地设定将回转操作从回转操作轮(夹持操作输入部)41传达至抓持件回转部47的构造,也可以是不具备回转操作传达部并且通过回转操作部使抓持件回转部直接回转的构造。
再者,可以任意地设定回转操作部及抓持件回转部的构造。
再者,在上述实施例中,虽然说明了持针器100、200、抓持器300具备:夹持臂开闭驱动部(第一驱动部)30、230、以及夹持臂回转驱动部(第二驱动部)40的情况,但是,举例而言,可以仅具备夹持臂开闭驱动部(第一驱动部),也可以是在不伴随回转操作下通过夹持臂开闭驱动部以抓持件(夹持件、钳件等)进行夹持操作的构造。
再者,在上述实施例中,虽然说明了在一对的夹持臂件21、321、421之中的左夹持臂件21L、321L、421L绕第一轴线O1回转的情况,但是,也可以是左夹持臂件21L、321L、421L与右夹持臂件21R、321R、421R各自绕第一轴线O1回转的构造。
再者,在上述实施例中,虽然说明了夹持件20、320、420是夹持构件可以从夹持臂开闭驱动部(第一驱动部)30、230、以及夹持臂回转驱动部(第二驱动部)40装卸的构造的情况,但是,夹持构件可以是固定于夹持臂开闭驱动部(第一驱动部)30、230或夹持臂回转驱动部(第二驱动部)40的构造。
再者,在上述实施例中,虽然说明了夹持件20或钳件320、420具备一对的夹持臂件21、321、421以及夹持臂保持部24并且夹持件20装设于抓持件回转部47的情况,但是,可以任意地设定夹持件的构造。再者,举例而言,夹持件20或钳件320、420可以是包含抓持件回转部47的构造,也可以是任意的安装关系。
【产业上的利用可能性】
根据本发明的抓持器、持针器、夹持件,操作者可以容易且有效地操作,因为提升夹持对象物时的夹持操作的信赖度,可以容易且有效地操作,具有产业上的利用性。
【附图标记的说明】
O1 第一轴线
O2 第二轴线
F 前端侧
R 基端侧
10 持针器本体(抓持器本体)
11 壳体
11H 安装孔
111 壳体本体
112 抓握部
12 底板
14 保护管
20 夹持件(抓持件)
21 夹持臂件(一对的夹持臂件)
21L 左夹持臂件
21R 右夹持臂件
22 夹持部
22L、22R 夹持凸部(夹持部)
23 缝合针夹持凹部
24 夹持臂保持部
24B 凸缘部(第二卡合部)
25 夹持操作接受杆
26 复位弹簧(夹持臂复位单元)
30、230 夹持臂开闭驱动部(第一驱动部)
31 夹持操作杆(夹持操作部)
32 夹持操作传达连接件
33 导引件
34、234 柔性传达件
35 轴向尺寸伸缩弹簧(夹持操作位移吸收单元)
353 绕组部(绕圈部)
36 夹持臂作动杆
37 夹持操作杆复位弹簧
38 夹持操作锁定机构(夹持操作锁定机构、夹持操作解除机构)
40 夹持臂回转驱动部(第二驱动部)
41 回转操作轮(回转操作部)
47 抓持件回转部
47B 凸缘部(第一卡合部)
100、200 持针器(抓持器)
110 缝合针(对象物)
235 S字形弹簧(夹持操作位移吸收单元)
2353 第一弯曲部(弯曲部)
2354 第二弯曲部(弯曲部)
300 抓持器
320、420 夹持件(抓持件)
321、421 夹持臂件(一对的夹持臂件)
321L、421L 左夹持臂件
321R、321L 右夹持臂件
322、322L、322R、422R、422L、422R 夹持凸部(夹持部)
323 对象物夹持凹部。
- 抓持器、持针器、夹持件
- 拐角件、配备有此种拐角件的集装箱及抓持器臂和抓持器