一种桥梁薄壁空心墩墩柱施工方法
文献发布时间:2023-06-19 10:38:35
技术领域
本发明涉及桥梁墩柱施工技术领域,具体涉及一种桥梁薄壁空心墩墩柱施工方法。
背景技术
丘陵间夹山间河谷地貌区,地形起伏较大,桥梁建造在丘陵间夹山间河谷地貌区时,通常将桥梁下部设计得较高,桥墩超过40米时一般设计为薄壁空心墩。墩柱施工定位控制难度大,对于高桥墩来说,墩身高、重心高、墩身柔度大、施工精度要求高,是其显著的特点,高墩施工接缝的处理要求高,因此对高墩的施工质量要求很高,而高墩的施工缝如处理不到位,将成为墩身受力的薄弱处。
现有技术中,针对较高高度的薄壁空心墩施工方法主要有液压爬模法、翻模、滑模法,液压爬模法可以实现倾斜爬升,使用于各种等截面及变截面高墩,实体及外观质量好,安全度较高,但其投入较大,翻模法适用于等截面或变截面的实心或空心墩及异形墩等,范围较广,实体及外观质量好,投入少,但其安全性较低,滑模沿着浇筑的混凝土上移,外观质量差,且现有技术中的扁担梁结构简单、操作平台单独搭建,耗材多,又不能为施工提供更多便利。
申请号为CN202010876207.0的专利公开了一种空心高墩的模板系统及其安装施工方法,其包括已浇筑墩柱、爬升系统、内模板、以及外模板,爬升系统包括置于已浇筑墩柱内壁的内横梁、置于已浇筑墩柱外壁的外横梁、水平桁架、若干置于内横梁和外横梁上的移动座、与埋件装置固连的荷载监测装置、以及若干置于水平桁架上的支撑装置,内横梁与外横梁均设置有后移装置,内模板与外模板置于后移装置上,提供一种结构稳定、施工简便高效、且便于爬升的空心高墩的模板系统及其安装施工方法,其通过液压缸、驱动履带驱动爬升,爬升不稳定,且搭建和操作繁琐,耗材多,投入成本较大,混凝土浇筑时容易变形,模板结构不稳定;申请号为201920868367.3的专利公开了一种用于高墩施工的模板系统,其通过模板提升系统提升模板,通过升降装置提升内操作平台和外操作平台,通过不同升降系统进行模板和操作平台的升降,操作复杂,模板的安装和拆除麻烦,施工功效低,安全性低。
需要提供一种桥梁薄壁空心墩墩柱施工方法,在现有施工方法的基础上综合各施工方法的特点、优势,采用翻滑结合并进行改进的施工方法,克服滑模和翻模施工的缺点,达到施工速度快、安全度高、混凝土质量有保证、投入较少的目的,并为实际施工提供更多便利。
发明内容
本发明要解决的技术问题是提供一种桥梁薄壁空心墩墩柱施工方法,能够解决现有技术中存在的爬升不稳定、模板结构不稳定、混凝土浇筑时容易变形、耗材多、投入成本较大、模板的安装和拆除麻烦、施工功效低、安全性低的问题。
为解决上述技术问题,本发明的技术方案为:包括以下步骤:
S1、施工准备:各构件加工制造并检查验收;
S2、墩柱底部浇筑:对墩柱底部的首节模板结构进行安装,并进行首次混凝土浇筑,首次混凝土浇筑完成后预埋数个支撑立杆;
S3、对翻滑结合系统进行安装,翻滑结合系统包括模板系统、操作平台、提升系统、施工精度控制系统和水电配套系统:
S3.1、对模板系统进行安装:模板系统包括模板结构和围圈,模板结构包括内模和外模,内模和外模采用精轧螺纹钢对拉加固,外模远离内模的一侧设有数个围圈,根据实体墩平面位置调整和安装围圈,外模侧边的数个围圈连接成整体形成桁架,围圈与外模间留有30-50cm距离,保证桁架提升过程模板结构与围圈的距离,以防侧偏,模板结构安装前先绑扎钢筋,再将调节丝杆一端安装在围圈上,然后就位模板结构,模板结构通过调节丝杆支撑在围圈上;
S3.2、操作平台安装:数个围圈焊接固定连接成的桁架整体形成操作平台的底座,数个围圈的顶部铺设钢板形成操作平台,围圈下方安装下挂平台;
S3.3、提升系统安装:提升系统包括数个穿心千斤顶和扁担梁,在桁架上方安装扁担梁,穿心千斤顶安装于扁担梁上方,且预埋的支撑立杆的上端穿过穿心千斤顶的穿心孔和扁担梁,提升系统沿支撑立杆向上爬行,带动扁担梁和桁架进行提升,支撑立杆上固定有定位卡环,定位卡环限定穿心千斤顶的爬升高度;
S3.4、施工精度控制系统安装:在桁架的外侧延伸支撑座,支撑座与桁架等高设置,支撑座上安装精度控制系统;
S3.5、水电配套系统安装:在操作平台和支撑座上安装电力线路和电力闸箱,在下挂平台上安装水管,水管的出水口正对着墩柱设置,水管的出水口位于模板结构的下方;
S3.6、安装后进行系统校正和调试,先校正模板系统及管线定位固定,然后开机调试系统;
S4、桁架提升:桁架提升前,先准确定位支撑立杆上的定位卡环,开动控制系统,穿心千斤顶内通过两个内齿卡环循环工作沿支撑立杆向上匀速爬行,带动扁担梁和桁架、操作平台提升,再对模板结构进行上移;
S5、模板结构就位进行下一节段混凝土施工:提升后通过调节丝杆进行调节,模板结构向前滑移,闭合安装,模板结构就位,进行下一节段混凝土的浇筑,浇铸后通过水管进行浇水养护;
S6、模板结构的拆除:混凝土凝固后,调节丝杆调节将模板结构拆除,再通过穿心千斤顶沿支撑立杆向上匀速爬行,带动扁担梁和桁架、模板结构、操作平台提升;
S7、模板结构再进行就位浇筑:在模板结构安装前进行钢筋绑扎,再通过调节丝杆进行模板结构的安装,进行再下一节段混凝土的浇筑,依次向上进入下一循环,不断浇筑,直至完成墩柱的浇筑。
进一步地,所述步骤S3.1中,外模为翻模,内模为滑模,内模和外模采用定型整体钢模板,现场拼装,模板结构悬挂于桁架上,随着桁架进行提升,模板高度为2.35m,为了便于外模拆除及安装,模板顶口下10cm处开眼,预埋外露钢筋,可提前将模板脱落。
进一步地,所述步骤S3.2中,操作平台的钢板的外侧和内侧设置护栏,护栏的底部设置踢脚板,桁架包括第一桁架和第二桁架,一对平行设置的第一桁架之间通过一对第二桁架连接形成一个口字型整体,且第一桁架的端部沿其自身长度方向延伸伸出口字型整体结构,使得两第一桁架的两个端部均形成一个用于临时放置设备的延伸区域;下挂平台的内侧和外侧均通过支架与围圈的底部焊接固定,下挂平台的高度设置为2m,采用角钢100*100连接桁架,间距1.5m,过道采用3mm花纹钢板满铺,下挂平台的外侧和内侧设置护栏,内、外侧设置2道护栏通长连接,护栏的底部通过活动板围护,活动板与护栏通过螺栓连接固定,防止零散材料掉落,下挂平台与桁架的延伸区域之间设有倾斜通道,倾斜通道将下挂平台与操作平台连通。
进一步地,所述步骤S3.3中,扁担梁由数个并列的主扁担梁、数个并列的次扁担梁垂直焊接固定为整体,扁担梁底部通过槽钢与桁架连接,槽钢与扁担梁、桁架焊接固定;数个主扁担梁、数个次扁担梁均间隔设置,位于边侧的主扁担梁、次扁担梁分别对应设于混凝土浇筑区域边缘处的绑扎钢筋,绑扎钢筋顺着主扁担梁、次扁担梁直线设置,主扁担梁、次扁担梁上分别连接有提升链条,主扁担梁、次扁担梁通过提升链条与底部的模板结构连接,通过提升链条对模板结构进行位置调节;支撑立杆采用直径为48mm钢管,壁厚3.5mm,支撑在混凝土内,扁担梁采用25a、22a工字钢制作,10槽钢做斜向支撑。
进一步地,所述步骤S3.3和S3.4中,穿心千斤顶采用14个,外模顺桥向每侧布置3个,间距1.65m,外横桥向每侧布置4个,间距1.5m,施工精度控制系统主要由电动机带动,内设警示铃,操作面上有电流表、电压表、压力表,精度控制系统通过两根油管,分别控制7根连接穿心千斤顶的油管,同时提升、同时回油,调节桁架的爬升速度。
进一步地,所述步骤S3.3中,扁担梁起承重作用,由其将操作平台、模板结构、人员机具的施工荷载通过穿心千斤顶传递给预埋支撑立杆,主扁担梁采用8根双拼I25a工字钢并列焊接而成,每端通过两根12#槽钢与桁架进行连接,次扁担梁采用3根I22a工字钢并列焊接而成,位于主扁担梁上方,并与主扁担梁焊接成整体,次扁担梁和桁架连接方式与主扁担梁相同,主扁担梁纵桥向布置4根,次扁担梁横桥向布置3根。
进一步地,所述步骤S2中预埋的支撑立杆,上端穿过穿心千斤顶的穿心孔,通过穿心千斤顶承受整个滑翻提升的荷载,选用φ48×3.5mm无缝钢管作为支撑立杆,其长度为6m,当穿心千斤顶爬升至距离支撑立杆顶端小于350mm时,应及时接长,支撑立杆采用焊接进行接长,焊接后需用砂轮机打磨光滑,且平整度与原钢管面一致。
本发明的优点在于:在现有施工方法的基础上综合各施工方法的特点、优势,采用翻滑结合并进行改进的施工方法,翻滑结合系统包括模板系统、操作平台、提升系统、施工精度控制系统和水电配套系统,克服滑模和翻模施工的缺点,达到施工速度快、安全度高、混凝土质量有保证、投入较少的目的;
将模板系统进行改进,模板结构通过调节丝杆支撑在围圈上,且围圈与模板结构间留有距离,模板结构与围圈分离,保证桁架提升过程模板与围圈的距离,以防侧偏,翻模操作方便,调节丝杆便于模板结构的拆除及安装,施工效率高,安全性高;
模板结构的顶部固定于扁担梁上,可对模板结构的顶部进行支撑固定,模板结构的内模和外模采用精轧螺纹钢对拉加固,模板结构更稳定,可防止混凝土浇筑时围圈变形,模板结构的位置可通过连接的提升链条进行微调,保证施工质量,绑扎钢筋可顺着主扁担梁、次扁担梁直线设置,钢筋直线分布可通过扁担梁进行大致定位,避免钢筋布置时产生歪斜,对支撑立杆进行接长时可在扁担梁上进行,扁担梁可为施工提供更多便利;
穿心千斤顶沿着支撑立杆向上爬升,带动扁担梁、桁架进行提升,再对模板结构进行上移,从而整个模板系统实现爬升,提升操作方便,爬升稳定;
以模板外侧的围圈形成的桁架为基础搭建操作平台,桁架为立体结构,质量轻且受力更好,小型机具、设备如电焊机、配电箱等可放置在桁架的延伸区域,给桁架留出畅通的施工通道,钢筋也可顺着桁架长度方向均衡平放,使用方便,在操作平台的底部设置下挂平台,用于材料的辅助放置,需要使用时直接将材料吊取即可,下挂平台作为混凝土保养维护的辅助平台,养护方便,保证浇水质量。
附图说明
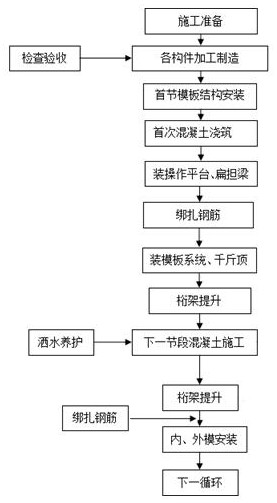
图1为本发明的一种桥梁薄壁空心墩墩柱施工方法的具体施工流程图;
图2为本发明的一种桥梁薄壁空心墩墩柱施工方法的翻滑结合系统的结构示意图;
图3为本发明的一种桥梁薄壁空心墩墩柱施工方法的扁担梁与桁架的连接示意图;
图4为本发明的一种桥梁薄壁空心墩墩柱施工方法的桁架和延伸区域的立体结构示意图;
图5为本发明的一种桥梁薄壁空心墩墩柱施工方法的桁架的俯视结构示意图;
图6为本发明的一种桥梁薄壁空心墩墩柱施工方法的扁担梁的俯视结构示意图。
具体实施方式
为了使本发明的目的、技术方案及优点更加清楚明白,以下结合附图及具体实施方式,对本发明进行进一步详细说明。下面的实施例可以使本专业的技术人员更全面地理解本发明,但并不因此将本发明限制在所述的实施例范围之中。
本具体实施方式以湖头桥梁为例进行具体说明,湖头桥梁左幅桥梁中心桩号K24+501.0,桥跨为9*30+60+110+60+5*30,采用PC连续钢构T梁、异形梁、单线(幅)桥长为657m;右幅桥梁中心桩号+K24+520.75,桥跨为7*30+53+90*2+53+5*30,单线(幅)桥长657.5m,采用PC连续钢构T梁、异形梁,桥宽2*12.75m。上部构造主梁直梁设置,曲线形式通过翼板调整,墩台按直径设置,桥面纵横坡通过盖梁、台帽横坡及桥面铺装的厚度共同调整。
桥墩采用柱式墩、箱墩、基础采用灌注桩基础。桥台采用柱式台、桩基U台,基础采用灌注桩基础,两桥台处设置D-80伸缩装置,联接墩处设D-160伸缩装置,两桥台处设置L=8m搭板。左桥薄壁空心墩信息表见表1,右桥薄壁空心墩信息表见表2。
表1:左桥薄壁空心墩信息表
表2:右桥薄壁空心墩信息表
该工程桥址区主要位于剥蚀区丘陵间夹山间河谷地貌区,地形起伏较大,山坡坡度20-40°,地表植被发育,自然坡体稳定。地形条件如下:(1)地形条件差:桥址区主要位于剥蚀区丘陵间夹山间河谷地貌区,地形起伏较大,夏季高温时间长,雨量大,湖头桥梁跨越九龙江,施工便道铺设较困难,施工场地少,施工条件差;(2)安全风险大:高空作业点多,不确定风险因素多,施工风险较大;(3)施工组织难度大:受自然条件限制、作业面多,设备、材料等进场运输困难,资源合理配置和组织难度大;(4)施工控制难度大:墩身施工定位控制难度大;(5)施工工期紧张:湖头桥梁为全线控制性工程,工期压力大,高墩施工必须保证翻滑施工为上部箱梁悬浇提供更多的施工时间,高墩施工工期对整体工期影响较大。
场地地震基本烈度为7度,设计地震峰值加速度为0.1g,II类场地土,地震动反应谱特征周期为0.4s;场地未见饱和和液化砂土层及软土分布,两侧桥台地形起伏较大,为抗震不利地段。
水文地质:场区地表水发育,桥梁横跨韩江,河谷宽50-80m,水流量较大;场区地下水、地下水对混凝土结构及混凝土结构中的钢筋具微腐蚀性。
总体施工方案如下:本工程左幅10#、11#、右幅8#、9#、10#为主墩,左幅8#、9#、12#右幅7#、11#为过渡墩均为薄壁空心墩,施工时拟投入左幅10#、11#、右幅8#、9#、10#墩共5套施工翻滑模板、塔吊及上下电梯等设备及相应人员,待左幅10#、11#墩、右幅8#、9#、10#墩身施工结束后再将翻滑模板及相应施工人员转至过渡墩及引桥墩,5个墩柱同时施工时需合理安排各工种人员以形成流水作业。
施工布置:现场施工场地狭小,高差大,需合理进行规划布置,施工时考虑钢结构、模板等在后场加工场地加工,钢筋在后场加工后运至各墩位处。每个墩柱处设置一台QT63(6010)型塔吊及一台人行上下电梯,混凝土浇筑拟采用49m泵车、塔吊吊装漏斗进行施工。
技术准备:施工前的技术准备工作主要包括以下内容:
(1)施工前组织测量、试验、现场人员及技术人员对图纸进行复核,并对现场进行地质调查,对存在的问题联系设计及时解决;
(2)查看工程地质、水文地质资料是否符合现场实际情况;
(3)组织全体技术人员学习桥涵施工技术规范,了解空心薄壁墩施工的主要内容和技术要求,并进行技术、安全交底,尤其对滑翻结合施工进行现场培训、试操作;
(4)试验室需提前做好墩柱混凝土配合比试配工作,并经相关单位出具有效报告。施工需要的各项钢筋、水泥、骨料、外加剂、套筒、焊接接头等提前进行检测,检测合格并取得检测报告;
(5)测控部对控制点进行复核,保证墩柱高程和平面位置控制精度达到要求。测量仪器需使用精度0.5″全站仪,并取得校验证书。计算墩柱施工各节段的坐标和高程,并进行复核,确保放样准确。
施工队伍及劳动力准备:按照总体施工部署来进行薄壁空心墩的施工,包括管理人员、混凝土工、钢筋工等将在项目部的统一协调和资源配置下施工。根据翻滑结合施工工艺的特点,模板工、钢筋工、塔吊司机、罐车司机和机械操作手必须配置2班人员,进行轮班作业,避免连续作业时间过长和疲劳作业,保证工人的基本劳动防护权利和保证施工的安全。各作业队的人力资源配置如表3所示。
表3:施工人员配置数量计划表
材料准备:施工所需要的各项材料提前进场,并经试验室取样检测合格,砂石料必须提前进行备料,以满足现场施工需要,钢筋等材料必须按照施工计划保证存量在1个月需要量以上,计划开工前1个月,墩柱模板必须提前进场,模板必须按照设计图纸进行加工,保证足够的刚度,模板面板厚度不得小于6mm,各加强支撑按照设计图纸进行加工,混凝土、钢筋在加工场集中加工,半成品运至现场安装。
机械设备准备:
(1)主要测量试验仪器配置
a 测量仪器配置
根据墩柱施工的需要,主要投入的测量仪器配置如表4所示。
表4:投入的主要测量仪器
b 试验仪器配置:设置工地试验室以满足墩身施工的需要,及时对墩身混凝土强度进行回弹检测及钢筋保护层检测,如表5所示。
表5:投入的主要试验仪器。
(2)主要施工机械配置:根据墩柱施工的需要,主要投入的施工机具如表6所示。
表6:施工主要机具配置表
如图1-图6所示,具体实施技术方案如下:包括以下步骤:
S1、施工准备:各构件加工制造并检查验收,运输至施工区域。
S2、墩柱底部浇筑:对墩柱底部的首节模板结构进行安装,并进行首次混凝土浇筑,首次混凝土浇筑完成后预埋数个支撑立杆10,预埋的支撑立杆10,上端穿过穿心千斤顶5的穿心孔,通过穿心千斤顶5承受整个滑翻提升的荷载,选用φ48×3.5mm无缝钢管作为支撑立杆10,其长度为6m,当穿心千斤顶5爬升至距离支撑立杆10顶端小于350mm时,应及时接长,支撑立杆10采用焊接进行接长,焊接后需用砂轮机打磨光滑,且平整度与原钢管面一致。
S3、对翻滑结合系统进行安装,翻滑结合系统包括模板系统、操作平台、提升系统、施工精度控制系统和水电配套系统:
S3.1、对模板系统进行安装:模板系统包括模板结构1和围圈2,模板结构1包括内模11和外模12,内模11和外模12采用φ25精轧螺纹钢对拉加固,外模12远离内模11的一侧设有数个围圈2,根据实体墩平面位置调整和安装围圈2,外模12侧边的数个围圈2连接成整体形成桁架,围圈2与外模12间留有30-50cm距离,保证桁架提升过程模板结构1与围圈2的距离,以防侧偏,模板结构1安装前先绑扎钢筋,再将调节丝杆4一端安装在围圈2上,然后就位模板结构1,模板结构1通过调节丝杆4支撑在围圈2上;
外模12为翻模,内模11为滑模,内模11和外模12采用定型整体钢模板,现场拼装,模板结构1悬挂于桁架上,随着桁架进行提升,模板高度为2.35m,为了便于外模拆除及安装,模板顶口下10cm处开眼,预埋外露钢筋,可提前将模板脱落,模板结构1安装后进行垂直度校正检查,主要采用坐标法,用全站仪、水准仪进行控制。
模板高度的选定:滑翻模板的模板结构1主要由面板、纵横肋等构成,根据工程实际情况,滑翻模板用整块钢板,因墩身较高及墩柱尺寸较大,综合考虑节段施工时间、钢筋配料和减少砼施工缝的数量的目的,选定模板高度2.4m。
由于墩身高,模板倒用次数多,钢模面板使用6mm厚钢板制作,模板设有10槽钢竖肋及2I25a工字钢背架,竖肋和背架皆组焊而成,同时多层背架通过螺栓连接后组成空间桁架,保证了模板的空间刚度,提高墩身混凝土的外观质量。
将模板系统进行改进,模板结构1通过调节丝杆4支撑在围圈2上,且围圈2与模板结构1间留有距离,模板结构1与围圈2分离,保证桁架提升过程模板与围圈2的距离,以防侧偏,翻模操作方便,调节丝杆4便于模板结构1的拆除及安装,施工效率高,安全性高,模板结构1的顶部固定于扁担梁3上,模板结构1的内模11和外模12采用精轧螺纹钢对拉加固,模板结构1更稳定,可防止混凝土浇筑时围圈变形。
S3.2、操作平台安装:数个围圈2焊接固定连接成的桁架7整体形成操作平台的底座,数个围圈2的顶部铺设3mm花纹钢板形成操作平台6,围圈2下方安装下挂平台8。
操作平台6的钢板的外侧和内侧设置护栏,护栏的底部设置踢脚板,桁架7包括第一桁架71和第二桁架72,一对平行设置的第一桁架71之间通过一对第二桁架72连接形成一个口字型整体,且第一桁架71的端部沿其自身长度方向延伸伸出口字型整体结构,使得两第一桁架71的两个端部均形成一个用于临时放置设备的延伸区域73;下挂平台8的内侧和外侧均通过支架与围圈2的底部焊接固定,下挂平台8的高度设置为2m,宽1.2m,距离墩身0.5m,用于拆模及混凝土养护修饰,下挂平台8悬挂及盘底均采用L10×5角铁制作,采用角钢100*100连接桁架,间距1.5m,过道采用3mm花纹钢板满铺,下挂平台8的外侧和内侧设置护栏,护栏扶手设置于距离下挂平台8底1.2m处,采用槽钢8制作而成,内、外侧设置2道护栏通长连接,护栏的底部通过活动板围护,活动板与护栏通过螺栓连接固定,防止零散材料掉落,下挂平台8与桁架7的延伸区域73之间设有倾斜通道,倾斜通道将下挂平台8与操作平台6连通。
角钢焊接而成的围圈2构成桁架,为保证桁架系统适应墩身尺寸,采用1m×1.2m的矩形桁架梁作为桁架系统,矩形桁架梁现场加工,主桁采用L100×10角钢制作,主肋采用L75×5角钢制作,连杆采用L75×5角钢制作,角钢间采用焊接而成,焊接应按照相关规范要求标准进行。
以模板外侧的围圈形成的桁架7为基础搭建操作平台,桁架7为立体结构,质量轻且受力更好,小型机具、设备如电焊机、配电箱等可放置在桁架7的延伸区域73,给桁架7留出畅通的施工通道,钢筋也可顺着桁架7长度方向均衡平放,使用方便;在操作平台6的底部设置下挂平台8,用于材料的辅助放置,需要使用时直接将材料吊取即可,下挂平台8作为混凝土保养维护的辅助平台,养护方便,保证浇水质量。
S3.3、提升系统安装:提升系统包括数个穿心千斤顶5和扁担梁3,在桁架上方安装扁担梁3,穿心千斤顶5安装于扁担梁3上方,且预埋的支撑立杆10的上端穿过穿心千斤顶5的穿心孔和扁担梁3,提升系统沿支撑立杆10向上爬行,带动扁担梁3和桁架进行提升,支撑立杆10上固定有定位卡环,定位卡环限定穿心千斤顶5的爬升高度。
穿心千斤顶5采用14个,外模顺桥向每侧布置3个,间距1.65m,外横桥向每侧布置4个,间距1.5m,穿心千斤顶5采用QYD-100型楔块式液压千斤顶,理论起重量100KN,工作起重量50KN,行程25mm,穿心千斤顶5内通过两个内齿卡环循环工作沿支撑杆向上爬行,穿心千斤顶5沿着支撑立杆10向上爬升,带动扁担梁3、桁架进行提升,再对模板结构1进行上移,从而整个模板系统实现爬升,提升操作方便,爬升稳定。
扁担梁3由数个并列的主扁担梁31、数个并列的次扁担梁32垂直焊接固定为整体,扁担梁3底部通过槽钢与桁架7连接,槽钢与扁担梁3、桁架7焊接固定;数个主扁担梁31、数个次扁担梁32均间隔设置,位于边侧的主扁担梁31、次扁担梁32分别对应设于混凝土浇筑区域边缘处的绑扎钢筋,绑扎钢筋顺着主扁担梁31、次扁担梁32直线设置,主扁担梁31、次扁担梁32上分别连接有提升链条,主扁担梁31、次扁担梁32通过提升链条与底部的模板结构1连接,通过提升链条对模板结构1进行位置调节;支撑立杆10采用直径为48mm钢管,壁厚3.5mm,支撑在混凝土内,扁担梁3采用25a、22a工字钢制作,10槽钢做斜向支撑;扁担梁3起承重作用,由其将操作平台6、模板结构1、人员机具的施工荷载通过穿心千斤顶5传递给预埋支撑立杆10,主扁担梁采用8根双拼I25a工字钢并列焊接而成,每端通过两根12#槽钢与桁架进行连接,次扁担梁采用3根I22a工字钢并列焊接而成,位于主扁担梁上方,并与主扁担梁焊接成整体,次扁担梁和桁架连接方式与主扁担梁相同,主扁担梁纵桥向布置4根,次扁担梁横桥向布置3根。
模板结构的顶部固定于扁担梁上,可对模板结构1的顶部进行支撑固定,模板结构的内模和外模采用精轧螺纹钢对拉加固,模板结构更稳定,可防止混凝土浇筑时围圈变形,模板结构1的位置可通过连接的提升链条进行微调,保证施工质量,绑扎钢筋可顺着主扁担梁31、次扁担梁32直线设置,钢筋直线分布可通过扁担梁3进行大致定位,避免钢筋布置时产生歪斜,对支撑立杆10进行接长时可在扁担梁3上进行,扁担梁3可为施工提供更多便利;
S3.4、施工精度控制系统安装:在桁架的外侧延伸支撑座,支撑座与桁架等高设置,支撑座上安装精度控制系统,施工精度控制系统主要由电动机带动,内设警示铃,操作面上有电流表、电压表、压力表,精度控制系统通过两根油管,分别控制7根连接穿心千斤顶的油管,同时提升、同时回油,调节桁架的爬升速度。
液压操作系统由YKT-36型液压控制台、QYD-100型液压千斤顶、油管及其他附件组成,组装前须检查管路是否通畅,耐压是否符合要求,有无漏油等现象,若有异常,应及时排除,使用前将调节螺母上的防尘帽取上,装上限位调平器。
S3.5、水电配套系统安装:在操作平台6和支撑座上安装电力线路和电力闸箱,在下挂平台8上安装水管9,水管9的出水口正对着墩柱设置,水管9的出水口位于模板结构1的下方,在下挂平台8上安装水管9,水管9的出水口正对着桥墩设置,水管9形成喷淋系统,可对浇筑好的桥墩直接进行喷淋养护,养护方便。
S3.6、安装后进行系统校正和调试,先校正模板系统及管线定位固定,然后开机调试系统。
S4、桁架提升:桁架提升前,先准确定位支撑立杆10上的定位卡环,开动控制系统,穿心千斤顶5内通过两个内齿卡环循环工作沿支撑立杆10向上匀速爬行,带动扁担梁3和桁架、操作平台6提升,再对模板结构1进行上移。
S5、模板结构就位进行下一节段混凝土施工:提升后通过调节丝杆4进行调节,模板结构1向前滑移,闭合安装,模板结构1就位,进行下一节段混凝土的浇筑,浇铸后通过水管9进行浇水养护。
S6、模板结构的拆除:混凝土凝固后,调节丝杆4调节将模板结构1拆除,再通过穿心千斤顶5沿支撑立杆10向上匀速爬行,带动扁担梁3和桁架、模板结构1、操作平台6提升。
S7、模板结构再进行就位浇筑:在模板结构1安装前进行钢筋绑扎,再通过调节丝杆进行模板结构的安装,进行再下一节段混凝土的浇筑,依次向上进入下一循环,不断浇筑,直至完成墩柱的浇筑。
本具体实施方式在现有施工方法的基础上综合各施工方法的特点、优势,采用翻滑结合并进行改进的施工方法,翻滑结合系统包括模板系统、操作平台、提升系统、施工精度控制系统和水电配套系统,克服滑模和翻模施工的缺点,达到施工速度快、安全度高、混凝土质量有保证、投入较少的目的,施工工期短,确保整体工期不受影响。
以上显示和描述了本发明的基本原理和主要特征以及本发明的优点。本行业的技术人员应该了解,本发明不受上述实施例的限制,上述实施例和说明书中描述的只是说明本发明的原理,在不脱离本发明精神和范围的前提下,本发明还会有各种变化和改进,这些变化和改进都落入要求保护的本发明范围内。本发明要求保护范围由所附的权利要求书及其等效物界定。
- 一种桥梁薄壁空心墩墩柱施工方法
- 一种跨海桥梁墩柱及承台的水下施工装置及其施工方法