电动汽车防侧翻控制电路
文献发布时间:2023-06-19 10:55:46
技术领域
本发明涉及电动汽车技术领域,特别是涉及电动汽车防侧翻控制电路。
背景技术
随着社会的发展,人们对汽车安全性的关注度越来越高,而纯电动汽车作为现代社会的主要公共交通工具,其安全性更加受到人们的重视,在所有交通事故中,纯电动汽车侧翻往往导致重大伤亡,普遍采用在结构上对顶盖结构的强度、刚度以及保证乘员生存空间的车身结构的加强进行,或加装车辆稳定系统(ESP),通过判断车辆的侧向加速度的大小来判断车辆是否有侧翻倾向,当有侧翻倾向时,车辆稳定系统(ESP)会对车轮进行加压,增加纵向力降低车轮的附着系数,让车辆侧滑而不侧翻,前者增加了车身结构自重,无法提前预防、而且对于纯电动汽车侧翻安全性也没有显著的提高,后者系统复杂不能及时控制,且侧滑影响车辆的稳定性,增加能量消耗及轮胎过度磨损,造成撞车等恶性事故,因此,如何避免电动汽车侧翻,提高车辆的稳定性是亟待解决的问题。
发明内容
针对上述情况,为克服现有技术之缺陷,本发明之目的在于提供电动汽车防侧翻控制电路,通过对侧翻阈值校正、逆向推到出允许车速、转向盘角度,进而及时调节、控制,使电动汽车保持平衡、不侧翻性。
其解决的技术方案是,包括侧翻阈值校正电路、转速调节电路、转向调节电路,其特征在于,所述侧翻阈值校正电路接收的侧翻阈值信号经滤波后,进入运算放大器AR1为核心的放大器,由目标路况附着力调节放大倍数、目标路况转弯弧度修正进行侧翻阈值校正后,输出到转速调节电路中除法电路,与耦合后的轮距质心高度比和目标路况转弯弧度相除,计算出转速阈值信号,之后进入比较器与实际转速信号进行比较,高电平时进入信号控制器以限制电动汽车的转速,所述转向调节电路采用减法器对目标路况转弯弧度与现转向盘角度进行差值运算,差值信号高时,经稳压管Z2、RC滤波后进入信号控制器以调节转向盘角度,差值信号较高时,并触发三极管Q3导通,使目标路况转弯弧度进入转速调节电路,实现同时调节电动汽车的转速。
本发明的有益效果是:结构简单、响应快,接收的侧翻阈值信号经滤波后,进入运算放大器AR1为核心的放大器,由目标路况附着力调节放大倍数、目标路况转弯弧度修正进行侧翻阈值校正,解决预测的侧翻临界值比精确值大很多的问题,提高侧翻阈值信号的精度;
除法器芯片U1对校正后侧翻阈值、经耦合后的轮距质心高度比和目标路况转弯弧度信号,相除计算出转速阈值信号,进入比较器与实际转速信号进行比较,高电平时进入信号控制器以限制电动汽车的转速,采用减法器对目标路况转弯弧度与现转向盘角度进行差值运算,差值信号高时,经击穿的稳压管Z2,电阻R20和电容C3进行RC滤波后进入信号控制器以调节转向盘角度,可由控制器根据差值信号的大小控制电机的回转力,也即通过调节转向助动力的大小调节转向盘角度,差值信号较高时,并触发三极管Q3导通,使目标路况转弯弧度进入转速调节电路,实现同时调节电动汽车的转速,以此通过侧翻阈值逆向推到出允许车速、转向盘角度,进而及时调节、控制,使电动汽车保持平衡、不侧翻,及时控制,提高了车辆的稳定性。
附图说明
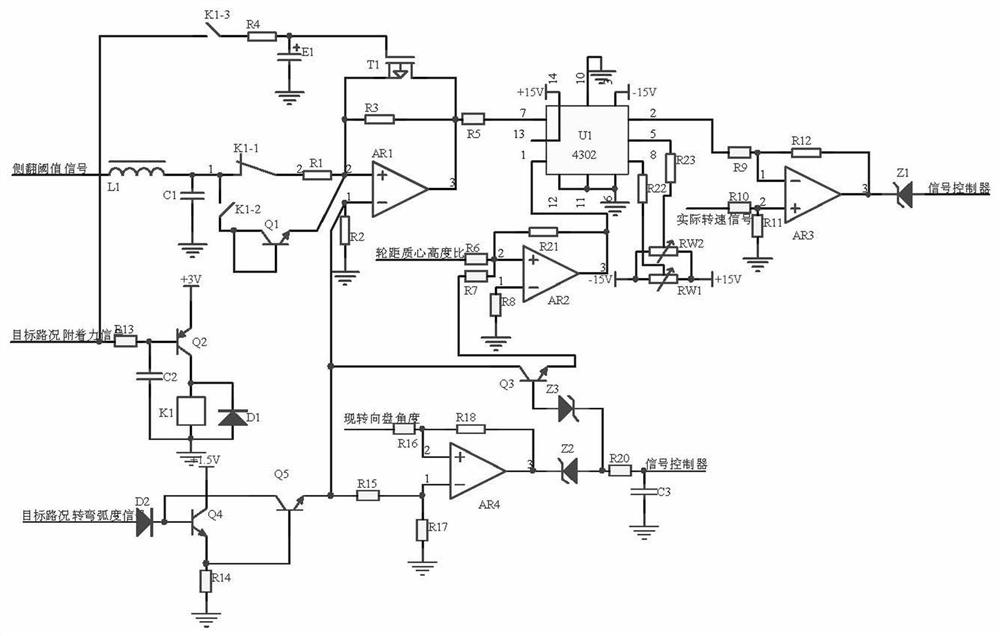
图1为本发明的电路原理图。
具体实施方式
有关本发明的前述及其他技术内容、特点与功效,在以下配合参考附图1对实施例的详细说明中,将可清楚的呈现。以下实施例中所提到的结构内容,均是以说明书附图为参考。
下面将参照附图描述本发明的各示例性的实施例。
实施例一,电动汽车防侧翻控制电路,包括侧翻阈值校正电路、转速调节电路、转向调节电路,所述侧翻阈值校正电路接收的侧翻阈值信号经滤波后,进入运算放大器AR1为核心的放大器,由目标路况附着力调节放大倍数、目标路况转弯弧度修正进行侧翻阈值校正,解决预测的侧翻临界值比精确值大很多的问题,提高侧翻阈值信号的精度,之后输出到转速调节电路中除法器芯片U1的引脚7,除法器芯片U1的引脚1连接经运算放大器AR2耦合后的轮距质心高度比和目标路况转弯弧度信号(在三极管Q3导通时接入),除法器芯片U1将两输入信号相除计算出转速阈值信号,进入运算放大器AR3、电阻R9-电阻R12组成的比较器与实际转速信号进行比较,高电平时进入信号控制器以限制电动汽车的转速,所述转向调节电路采用运算放大器AR4、电阻R15-电阻R18组成的减法器对目标路况转弯弧度与现转向盘角度进行差值运算,差值信号高时,一路经击穿的稳压管Z2,电阻R20和电容C3进行RC滤波后进入信号控制器以调节转向盘角度,可由控制器根据差值信号的大小控制电机的回转力,也即通过调节转向助动力的大小调节转向盘角度,差值信号较高时,并触发三极管Q3导通,使目标路况转弯弧度进入转速调节电路,实现同时调节电动汽车的转速,以此通过侧翻阈值逆向推到出允许车速、转向盘角度,进而及时调节、控制,使电动汽车保持平衡、不侧翻,及时控制,提高了车辆的稳定性。
实施例二,在实施例一的基础上,所述侧翻阈值校正电路接收的侧翻阈值信号(也即现有的不同类型汽车的侧翻临界值)经电感L1和电容C1滤波后,进入运算放大器AR1、电阻R1、电阻R2、电阻R3组成的放大器,放大器由目标路况附着力调节放大倍数,具体的根据道路附着系数在0.1~0.6范围时,道路附着系数增加,弯道侧翻阈值信号减小,且为指数函数的关系,设置电阻R13、电容C2、三极管Q2在道路附着系数在0.1~0.6范围时,三极管Q2导通,继电器K1线圈得电,继电器K1的常闭触点K1-1断开、继电器K1的常开触点K1-2、继电器K1的常开触点K1-3闭合,侧翻阈值信号一路经闭合的继电器K1的常开触点K1-2进入三极管Q1、运算放大器AR1、电阻R2、电阻R3组成的指数电路,对侧翻阈值信号修正,放大器由目标路况转弯弧度反馈到放大器反相输入端进行侧翻阈值校正,具体的根据侧翻阈值等于坡道角与质心高度比之和的关系,在目标路况转弯弧度高时,二极管D2导通、三极管Q4导通,进而三极管Q5触发导通,三极管Q5将目标路况转弯弧度信号反馈到放大器反相输入端,以此进行侧翻阈值校正,解决预测的侧翻临界值比精确值大很多的问题,提高侧翻阈值信号的精度,之后输出到转速调节电路中除法电路,包括电感L1、二极管D2,电感L1的一端连接侧翻阈值信号,电感L1的另一端分别连接接地电容C1的一端、继电器K1的常闭触点K1-1的一端、常开触点K1-2的一端,继电器K1的常闭触点K1-1的另一端经电阻R1分别连接三极管Q1的发射极、电阻R3的一端、MOS管T1的源极、运算放大器AR1的同相输入端,继电器K1的常开触点K1-2的另一端连接三极管Q1的基极和集电极,运算放大器AR1的反相输入端通过电阻R2连接地,运算放大器AR1的输出端电阻R3的另一端、MOS管T1的漏极为侧翻阈值校正电路输出信号,MOS管T1的栅极分别连接接地电解电容E1的正极、电阻R4的一端,电阻R4的另一端连接继电器K1的常开触点K1-3的一端,继电器K1的常开触点K1-3的另一端和电阻R13的一端连接目标路况附着力信号,电阻R13的另一端分别连接接地电容C2的一端、三极管Q2的基极,三极管Q2的发射极连接电源+3V,三极管Q2的集电极分别连接继电器K1线圈的一端、二极管D1的负极,继电器K1线圈的另一端、二极管D1的正极连接地,二极管D2正极连接目标路况转弯弧度信号,二极管D2的负极分别连接三极管Q4的基极、三极管Q5的集电极,三极管Q4的集电极连接电源+1.5V,三极管Q4的发射极分别连接接地电阻R14的一端、三极管Q5的基极,三极管Q5的发射极连接运算放大器AR1的反相输入端。
实施例三,在实施例一的基础上,所述转速调节电路将接收的校正后的侧翻阈值信号连接到除法器芯片U1的引脚7,除法器芯片U1的引脚1连接经运算放大器AR2耦合后的轮距质心高度比和目标路况转弯弧度信号,除法器芯片U1将两输入信号相除计算出转速阈值信号,进入运算放大器AR3、电阻R9-电阻R12组成的比较器与实际转速信号进行比较,高电平时进入转速控制器以限制电动汽车的转速,包括运算放大器AR2、除法器芯片U1,运算放大器AR2的同相输入端分别连接电阻R6的一端、电阻R7的一端、电阻R21的一端,电阻R6的另一端连接轮距质心高度比信号,电阻R7的另一端连接三极管Q3的发射极,运算放大器AR2的反相输入端连接接地电阻R8的一端,电阻R21的另一端连接运算放大器AR2的输出端、除法器芯片U1的引脚1,除法器芯片U1的引脚7通过电阻R5连接运算放大器AR1的输出端,除法器芯片U1的引脚13和引脚14连接电源+15V,除法器芯片U1的引脚3、引脚11、引脚12、引脚6连接地,除法器芯片U1的引脚3连接电源-15V,除法器芯片U1的引脚5、引脚8分别通过电阻R22、电阻R23连接电位器RW1的可调端、电位器RW2的可调端,电位器RW1的左端、电位器RW2的左端连接电源-15V,电位器RW1的右端、电位器RW2的右端连接电源+15V,除法器芯片U1的引脚2连接电阻R9的一端,电阻R9的另一端分别连接运算放大器AR3的反相输入端、电阻R12的一端,运算放大器AR3的同相输入端分别连接电阻R10的一端、接地电阻R11的一端,电阻R10的另一端连接实际转速信号,运算放大器AR3的输出端分别连接电阻R12的另一端、稳压管Z1的负极,稳压管Z1的正极连接到信号控制器;
所述转向调节电路采用运算放大器AR4、电阻R15-电阻R18组成的减法器对目标路况转弯弧度(可采用专利一种道路曲率半径自动测量方法获得,此为现有技术,在此不再详述)与现转向盘角度(可由转向角度传感器检测所得)进行差值运算,差值信号高时,一路经击穿的稳压管Z2,电阻R20和电容C3进行RC滤波后进入转向控制器以调节转向盘角度,可由控制器根据差值信号的大小控制电机的回转力,也即通过调节转向助动力的大小调节转向盘角度,差值信号较高时,并触发三极管Q3导通,使目标路况转弯弧度进入转速调节电路,实现同时调节电动汽车的转速,以此通过侧翻阈值逆向推到出允许车速、转向盘角度,进而及时调节、控制,使电动汽车保持平衡、不侧翻,及时控制,提高了车辆的稳定性,包括算放大器AR4,运算放大器AR4的同相输入端分别连接电阻R16的一端、电阻R18的一端,电阻R16的另一端连接现转向盘角度,运算放大器AR4的反相输入端分别连接电阻R15的一端、接地电阻R17的一端,电阻R15的另一端连接三极管Q5的发射极,运算放大器AR4的输出端分别连接电阻R18的另一端、稳压管Z2的负极,稳压管Z2的正极分别连接稳压管Z3的负极、电阻R20的一端,稳压管Z3的正极连接三极管Q3的基极,三极管Q3的集电极连接三极管Q5的发射极,三极管Q3的发射极连接电阻R7的另一端,电阻R20的另一端和接地电容C3的一端连接到信号控制器。
本发明具体使用时,侧翻阈值校正电路接收的侧翻阈值信号经滤波后,进入放大器,放大器由目标路况附着力调节放大倍数,具体的根据道路附着系数在0.1~0.6范围时,道路附着系数增加,弯道侧翻阈值信号减小,且为指数函数的关系,侧翻阈值信号一路经闭合的继电器K1的常开触点K1-2进入三极管Q1、运算放大器AR1、电阻R2、电阻R3组成的指数电路,对侧翻阈值信号修正,放大器由目标路况转弯弧度反馈到放大器反相输入端进行侧翻阈值校正,具体的根据侧翻阈值等于坡道角与质心高度比之和的关系,在目标路况转弯弧度高时,二极管D2导通、三极管Q4导通,进而三极管Q5触发导通,三极管Q5将目标路况转弯弧度信号反馈到放大器反相输入端,以此进行侧翻阈值校正,解决预测的侧翻临界值比精确值大很多的问题,提高侧翻阈值信号的精度,之后输出到转速调节电路中除法器芯片U1的引脚7,除法器芯片U1的引脚1连接经运算放大器AR2耦合后的轮距质心高度比和目标路况转弯弧度信号,除法器芯片U1将两输入信号相除计算出转速阈值信号,进入运算放大器AR3、电阻R9-电阻R12组成的比较器与实际转速信号进行比较,高电平时进入转速控制器以限制电动汽车的转速,转向调节电路采用运算放大器AR4、电阻R15-电阻R18组成的减法器对目标路况转弯弧度与现转向盘角度进行差值运算,差值信号高时,一路经击穿的稳压管Z2,电阻R20和电容C3进行RC滤波后进入转向控制器以调节转向盘角度,可由控制器根据差值信号的大小控制电机的回转力,也即通过调节转向助动力的大小调节转向盘角度,差值信号较高时,并触发三极管Q3导通,使目标路况转弯弧度进入转速调节电路,实现同时调节电动汽车的转速,以此使电动汽车保持平衡、不侧翻。
- 电动汽车防侧翻控制电路
- 分布式驱动电动汽车的防侧翻综合控制方法