一种编织用形状记忆合金丝的训练装置及其训练方法
文献发布时间:2023-06-19 11:00:24
【技术领域】
本发明涉及一种金属加工装置及其加工方法,具体涉及一种编织用形状记忆合金丝的训练装置及其训练方法,属于金属材料加工技术领域。
【背景技术】
形状记忆合金是一种具有变形恢复能力的新型功能材料,其主要特性包括形状记忆效应和超弹性效应。形状记忆效应体现在其处于马氏体状态时,加热能使其恢复到初始形状。而超弹性效应体现在温度和应力作用下,形状记忆合金能发生相变并产生恢复应力,在撤去载荷后又能够恢复到初始状态。作为一种智能材料,形状记忆合金驱动器有着广阔的应用前景,它具有比能量高,自身可同时作为传感器等特点,可在高强度结构中工作。
而在实际应用中,为了提高其材料性能,要对出厂的形状记忆合金进行训练。目前采取的训练方法中,有一种为拉伸至目标预应变长度再加热恢复。这种训练方式能使其力学性质趋于稳定,并提高其恢复应力。在制备具有预应变的形状记忆合金织物时,为配合制品的尺寸,以及保证织机生产的效率,需要长达数米的、连续的经过训练具有预应变的形状记忆合金丝。但是,目前缺少能对如此长的形状记忆合金丝加以训练的装置及方法,难以制造具有预应变的形状记忆合金大型编织物结构。
因此,为解决上述技术问题,确有必要提供一种创新的编织用形状记忆合金丝的训练装置及其训练方法,以克服现有技术中的所述缺陷。
【发明内容】
为解决上述问题,本发明的目的在于提供一种编织用形状记忆合金丝的训练装置,其可以对数米长度的单丝以及多根纤维构成的丝束进行拉伸训练,具有造价经济,工作范围大,占地空间小,温度循环效率高,拓展性强,可实现自动化控制等特点。
本发明的另一目的在于提供一种编织用形状记忆合金丝的训练方法。
为实现上述第一目的,本发明采取的技术方案为:一种编织用形状记忆合金丝的训练装置,其能对形状记忆合金丝进行训练,其包括夹持系统、拉伸系统、传感控制系统以及加热与冷却系统;其中,所述夹持系统上夹持有形状记忆合金丝;所述拉伸系统位于夹持系统的一侧,形状记忆合金丝一端连接至拉伸系统,并由拉伸系统拉伸;所述传感控制系统分别和形状记忆合金丝、拉伸系统、加热与冷却系统电性连接;所述加热与冷却系统设置在形状记忆合金丝的一侧,其能对形状记忆合金丝进行加热和冷却。
本发明的编织用形状记忆合金丝的训练装置进一步设置为:所述夹持系统包括金属支撑杆、塑料地脚、尼龙滑轮以及夹具;所述金属支撑杆竖直安装于塑料地脚上,其上开设有若干开孔;所述尼龙滑轮枢接在开孔上;所述夹具固定于金属支撑杆上,其能夹持形状记忆合金丝。
本发明的编织用形状记忆合金丝的训练装置进一步设置为:所述金属支撑杆设置有两根,其自上而下设置有若干个尼龙滑轮。
本发明的编织用形状记忆合金丝的训练装置进一步设置为:所述拉伸系统包括机架、丝杆滑台、电机、尼龙滑块、拉杆以及轨道;其中,所述丝杆滑台安装于机架上层,其通过联轴器与电机连接,使电机驱动丝杆滑台;所述轨道安装于机架下层;所述尼龙滑块置于轨道上,并能沿轨道滑动;所述拉杆一端和丝杆滑台的一侧相抵接,通过丝杆滑台能单向驱动拉杆;所述拉杆另一端连接至尼龙滑块,使拉杆联动尼龙滑块。
本发明的编织用形状记忆合金丝的训练装置进一步设置为:所述传感控制系统包括温度传感器、位移传感器、拉力传感器、数据采集装置以及上位机;所述温度传感器安装于形状记忆合金丝上;所述位移传感器安装于尼龙滑块的下方;所述拉力传感器安装于尼龙滑块上,其和形状记忆合金丝连接;所述温度传感器、位移传感器和拉力传感器分别电性连接至数据采集装置;所述数据采集装置电性连接至上位机。
本发明的编织用形状记忆合金丝的训练装置进一步设置为:所述位移传感器为拉杆式直线位移传感器;所述拉力传感器为S 型拉压力传感器。
本发明的编织用形状记忆合金丝的训练装置进一步设置为:所述电机上连接有一电机驱动器;所述电机驱动器电性连接至上位机。
本发明的编织用形状记忆合金丝的训练装置进一步设置为:所述加热与冷却系统包括可编程直流电源、半导体制冷片总成、正面风扇、背面风扇以及支撑脚;其中,所述可编程直流电源的两电极连接到形状记忆合金丝两端,并通过串行接口与上位机通讯,在上位机命令下使形状记忆合金丝通电而产生热量;所述半导体制冷片总成安装于支撑脚上,其设置在形状记忆合金丝一侧;所述正面风扇安装于半导体制冷片总成靠近形状记忆合金丝的一侧,背面风扇安装于半导体制冷片总成远离形状记忆合金丝的一侧。
本发明的编织用形状记忆合金丝的训练装置还设置为:所述半导体制冷片总成包括冷却板、半导体制冷片以及散热板;其中,所述半导体制冷片分别和冷却板和散热板粘贴;所述冷却板上安装有所述正面风扇;所述散热板上安装有所述背面风扇;所述风扇和冷却板的连接至一继电器,所述继电器与数据采集装置连接。
为实现上述第一目的,本发明采取的技术方案为:一种编织用形状记忆合金丝的训练方法,其包括如下工艺步骤:
步骤1),裁剪合适长度的形状记忆合金丝,并将形状记忆合金丝安装于训练装置上;
步骤2),在上位机控制软件中输入每次训练拉伸的长度,恢复时的温度与次数;
步骤3),将可编程直流电源连接在形状记忆合金丝的两端但不通电,将温度传感器安装在形状记忆合金丝上;
步骤4),预拉伸,使电机运转带动滑台,通过拉杆带动尼龙滑块以1mm/s的速度移动直至拉力传感器示数大于0,记录电机初始位置;
步骤5),电机继续运转带动滑台,通过拉杆带动尼龙滑块以 1mm/s的速度移动,将合金丝拉伸至预定长度;
步骤6),到达预定位置后,电机反转带动滑台回到初始位置;
步骤7),可编程直流电源在上位机的命令下输出电流;合金丝被通电,温度上升达到奥氏体相变温度,合金丝发生收缩,带动尼龙滑块往回运动直至与滑台接触;
步骤8),可编程直流电源停止输出电流,上位机使冷却系统的继电器通电,半导体冷却系统开始运转,半导体制冷片总成与正面风扇,背面风扇开始运转,将冷空气吹送至合金丝上,合金丝温度下降直至马氏体相变温度;
步骤9),重复步骤5)~8),直到达到预定的训练次数。
与现有技术相比,本发明具有如下有益效果:
1.本发明通过滚轮将形状记忆合金丝转向,从而能够增加形状记忆合金丝的拉伸长度,可以对数米长度的单丝以及多根纤维构成的丝束进行拉伸,大大提高了训练效率,且设备的工作范围大,占地空间小,成本低。
2.本发明通过设置半导体制冷系统,提高了冷却速度,并增大工作温度范围。
3.本发明的温度循环效率高,拓展性强,可实现自动化控制,在工程上具有很高的应用价值。
【附图说明】
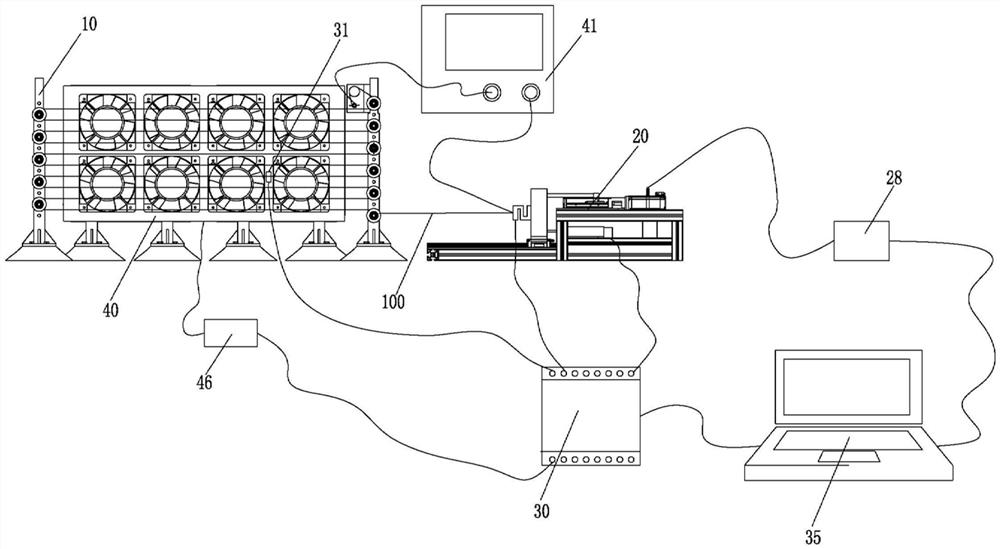
图1是本发明的编织用形状记忆合金丝的训练装置的总体结构示意图。
图2是图1中的夹持系统的结构示意图。
图3是图1中的拉伸系统的结构示意图。
图4是图1中的拉伸系统和传感控制系统的结构示意图。
图5是图1中的冷却系统的结构示意图。
图6是图1中的冷却系统背面的结构示意图。
图7是图1中的冷却系统的侧视图。
图8是图7中的半导体制冷片总成的立体图。
【具体实施方式】
请参阅说明书附图1至附图8所示,本发明为一种编织用形状记忆合金丝的训练装置,其能对形状记忆合金丝100进行训练,其由夹持系统10、拉伸系统20、传感控制系统30以及加热与冷却系统40等几部分组成。
其中,所述夹持系统10上夹持有形状记忆合金丝100。所述拉伸系统20位于夹持系统10的一侧,形状记忆合金丝100一端连接至拉伸系统20,并由拉伸系统20拉伸。所述传感控制系统 30分别和形状记忆合金丝100、拉伸系统20、加热与冷却系统40 电性连接。所述加热与冷却系统40设置在形状记忆合金丝100的一侧,其加热系统能对形状记忆合金丝100进行加热,冷却系统能对形状记忆合金丝100进行冷却。
具体的说,所述夹持系统10由金属支撑杆11、塑料地脚12、尼龙滑轮13以及夹具15等几部分组成。所述金属支撑杆11竖直安装于塑料地脚12上,从而保证形状记忆合金丝100通电时对地绝缘。在本实施方式中,所述金属支撑杆11设置有两根,上开设有若干开孔14,所述尼龙滑轮13枢接在开孔14上;即金属支撑杆11自上而下设置有若干个尼龙滑轮13,尼龙滑轮13的数量与位置可以按照形状记忆合金丝100长度调整。
进一步的,所述夹具15固定于其中一根金属支撑杆11上部,其能夹持形状记忆合金丝100的一端,形状记忆合金丝100依次卷绕在尼龙滑轮13上,实现形状记忆合金丝100的转向,从而能够对数米的形状记忆合金丝100进行一次性训练,形状记忆合金丝100的具体绕线方式如附图1所示。形状记忆合金丝100的另一端从最下端的尼龙滑轮13引出至拉伸系统20。
所述拉伸系统20由机架21、丝杆滑台22、电机23、尼龙滑块24、拉杆25以及轨道26等几部分组成。其中,所述丝杆滑台 22安装于机架21上层,其通过联轴器27与电机23连接,使电机 21驱动丝杆滑台22移动,丝杆滑台22为现有技术,在此不再赘述。
所述轨道26安装于机架21下层;所述尼龙滑块24置于轨道 26上,并能沿轨道26滑动。所述拉杆25一端和丝杆滑台22的一侧相抵接,通过丝杆滑台22能单向驱动拉杆25,所述拉杆25另一端连接至尼龙滑块24,使拉杆25联动尼龙滑块24。当电机23 正向转动时,移动的丝杆滑台22通过拉杆25带动尼龙滑块24运动,当电机反向转动时,拉杆25和丝杆滑台22相脱开,拉杆25 不动,尼龙滑块24将会停在原有位置。
所述传感控制系统30由温度传感器31、位移传感器32、拉力传感器33、数据采集装置34以及上位机35等几部分组成。其中,所述温度传感器31安装于形状记忆合金丝100上,其能读取形状记忆合金丝100上的温度。所述位移传感器32安装于尼龙滑块24的下方,其能读取尼龙滑块24移动的距离。所述拉力传感器33安装于尼龙滑块24上,其和形状记忆合金丝100连接,其能读取施加在形状记忆合金丝100上的预应力。在本实施方式中,所述位移传感器32为拉杆式直线位移传感器,但也可使用其他类型的位移传感器。所述拉力传感器为S型拉压力传感器。
进一步的,所述温度传感器31、位移传感器32和拉力传感器 33分别电性连接至数据采集装置34,所述数据采集装置34电性连接至上位机35,即上述传感器31、32、33的输出线均连接到数据采集装置34,再由数据采集装置34将采集到的信号传入上位机 35。
所述拉伸系统20的电机23上连接有一电机驱动器28;所述电机驱动器28电性连接至上位机35,通过上位机35控制电机驱动器28。
所述加热与冷却系统40由可编程直流电源41、半导体制冷片总成42、正面风扇43、背面风扇44以及支撑脚45等几部分组成。其中,所述可编程直流电源41的两电极连接到形状记忆合金丝 100两端,并通过串行接口与上位机35连接,在上位机命令下可使形状记忆合金丝100通电而产生热量。
所述半导体制冷片总成42安装于支撑脚45上,其设置在形状记忆合金丝100一侧,其能冷却形状记忆合金丝100。所述正面风扇43安装于半导体制冷片总成42靠近形状记忆合金丝100的一侧,背面风扇44安装于半导体制冷片总成42远离形状记忆合金丝100的一侧。
进一步的。所述半导体制冷片总成42由冷却板421、半导体制冷片422以及散热板423三部分组成。其中,所述半导体制冷片422分别和冷却板421和散热板423粘贴。所述冷却板421上安装有所述正面风扇43;所述散热板423上安装有所述背面风扇 44,且散热板423的背部设有散热翅片424,以加快散热速度。所述风扇43、44和冷却板421的连接至一继电器46,所述继电器 46与数据采集装置34连接,利用数据采集装置34控制继电器46 通断。
采用上述编织用形状记忆合金丝的训练装置对形状记忆合金丝进行训练的方法包括如下工艺步骤:
步骤1),裁剪合适长度的形状记忆合金丝100,并将形状记忆合金丝100安装于训练装置上;
步骤2),在上位机35控制软件中输入每次训练拉伸的长度,恢复时的温度与次数;
步骤3),将可编程直流电源41连接在形状记忆合金丝100 的两端但不通电,将温度传感器31安装在形状记忆合金丝100上;
步骤4),预拉伸,使电机23运转带动丝杆滑台22,通过拉杆25带动尼龙滑块24以1mm/s的速度移动直至拉力传感器33示数大于0,记录电机23初始位置;
步骤5),电机23继续运转带动丝杆滑台22,通过拉杆25带动尼龙滑块24以1mm/s的速度移动,将合金丝100拉伸至预定长度;
步骤6),到达预定位置后,电机23反转带动丝杆滑台22回到初始位置;
步骤7),可编程直流电源41在上位机35的命令下输出电流;合金丝100被通电,温度上升达到奥氏体相变温度,合金丝100 发生收缩,带动尼龙滑块24往回运动直至与丝杆滑台22接触;
步骤8),可编程直流电源41停止输出电流,上位机35使冷却系统的继电器46通电,半导体制冷片总成42与正面风扇43,背面风扇44开始运转,风扇43将冷空气吹送至合金丝100上,合金丝100温度下降直至马氏体相变温度;
步骤9),重复步骤5)~8),直到达到预定的训练次数。
以上的具体实施方式仅为本创作的较佳实施例,并不用以限制本创作,凡在本创作的精神及原则之内所做的任何修改、等同替换、改进等,均应包含在本创作的保护范围之内。
- 一种编织用形状记忆合金丝的训练装置及其训练方法
- 一种形状记忆合金丝的训练装置以及训练方法