一种五自由度果蔬采摘机器人末端执行器及其控制方法
文献发布时间:2023-06-19 11:17:41
技术领域
本发明涉及果蔬采摘的技术领域,具体而言,涉及一种五自由度果蔬采摘机器人末端执行器的控制方法。
背景技术
我国是荔枝、葡萄等串型水果的主要生产国,但在这些串型水果采摘过程中,我们依旧主要依靠人工采摘,劳动程度较大,占用一定的人工费用。而随着人口老龄化及劳动力的减少,水果的无损、及时采摘等问题也逐渐浮现。在机器人技术等智能工业的不断发展成熟的同时,制造业无不发生着深刻的变革,机器人正逐步取代人力劳动。若将机械手应用于串型水果采摘,则可以实现对水果的机械化、自动化和智能化采摘,有效地改善农业生产环境,促进农业科技的进步。
目前已有的采摘机器人的末端执行器通常由剪刀,气缸,软体夹持器构成,并使用简单的气动、电动控制使其完成夹剪操作,其工作方式单一,剪刀和夹爪采用固定式组成,只适用于果梗垂直悬挂的串果采摘,并未做到感知-采摘一体化,即采摘执行器作为最接近采摘目标的一个物体,其并不能对采摘目标进行感知,也不能对其进行自主的采摘,而且结构简单,功能单一,采摘误差较大,采摘场景的难度较大,并不能作为一个独立、自主、智能的作业单元。
发明内容
基于此,为了解决采摘机器人功能单一的问题,本发明提供了一种五自由度果蔬采摘机器人末端执行器,其具体技术方案如下:
一种五自由度果蔬采摘机器人末端执行器,所述末端执行器安装在机械臂上使用,包括安装架、主控模块、感知模块、纵向移动模块、横向移动模块、径向移动模块、驱动模块、剪刀和抓持模块,所述纵向移动模块固定于所述安装架,所述横向移动模块设置于所述纵向移动模块,所述径向移动模块设置于所述横向移动模块,所述驱动模块与所述径向移动模块连接,所述剪刀设置于所述驱动模块,所述抓持模块设置于所述安装架,所述主控模块包括控制器,所述控制器采用5G信号进行通信,所述感知模块、纵向移动模块、横向移动模块、径向移动模块、驱动模块和抓持模块均与所述控制器连接。
上述方案中,本申请通过纵向移动模块、横向移动模块和径向移动模块带动剪刀移动在3个自由度(纵向、横向、径向)上移动,加上传动机械臂自带的2个自由度(轴向转动、周向转动),本方案的剪刀能在5个自由度上移动,解决了目前采摘机器人末端执行器剪刀结构单一,不能移动,无法对果梗弯曲的果蔬进行采摘的问题;本申请采用感知模块和主控模块配合,解决了采摘机器人末端执行器对小物体存在一定夹取盲区的问题;本申请的末端执行器可以自主且智能的感知采摘目标,自主控制采摘目标,结构简单,使用方便。
进一步地,所述感知模块包括彩色摄像头、红外摄像头、激光摄像头和压力传感器,所述彩色摄像头设置于所述驱动模块,所述红外摄像头设置于所述纵向移动模块,所述激光摄像头设置于所述剪刀,所述压力传感器设置于所述抓持模块,所述彩色摄像头、红外摄像头、激光摄像头和压力传感器均与所述控制器连接。
进一步地,所述纵向移动模块包括第一电机、第一轴承、第一丝杆、第一安装座和第一滑块,所述第一安装座固定于所述安装架,所述第一丝杆固定于所述第一安装座,所述第一电机通过所述第一轴承与所述第一丝杆连接,所述第一滑块设置于所述第一丝杆。
进一步地,所述横向移动模块包括第二电机、第二轴承、第二丝杆、第二安装座和第二滑块,所述第二安装座固定于所述第一滑块上端,所述第二丝杆固定于所述第二安装座,所述第二电机通过所述第二轴承与所述第二丝杆连接,所述第二滑块设置于所述第二丝杆。
进一步地,所述径向移动模块包括驱动气缸和第一气缸固定座,所述驱动气缸通过所述第一气缸固定座固定于所述第二滑块。
进一步地,所述驱动模块包括双轴气缸和第二气缸固定座,所述第二气缸固定座与所述驱动气缸的动力输出轴连接,所述双轴气缸固定于所述第二气缸固定座。
进一步地,所述剪刀包括第一剪刃和第二剪刃,所述第一剪刃和第二剪刃分别与所述双轴气缸的两个动力输出端连接。
进一步地,所述抓持模块包括至少2个抓持单元,各个所述抓持单元分别设置于所述安装架的相对的两端,各个所述抓持单元的固定高度不同。
进一步地,所述抓持单元包括支架、舵机和软体手指,所述支架固定于所述安装架,所述软体手指设置于所述支架,所述舵机的动力输出端与所述软体手指连接。
本技术方案还提供了一种五自由度果蔬采摘机器人末端执行器的控制方法,包括以下步骤:
1)通过感知模块对需要采摘的目标进行识别和定位,然后将数据通过5G信号传递给控制器,控制器根据数据引导机械臂对末端执行器的位置进行粗调,再通过纵向移动模块、横向移动模块和径向移动模块对剪刀的位置进行精调;
2)通过所述感知模块获取目标与剪刀的距离,以及目标的轮廓大小,然后将数据通过5G信号传递给控制器,控制器通过的到的数据控制软体夹持模块对目标进行夹持;
3)夹持时,感知模块将夹持时获取的压力数据通过5G信号传输至控制器,主控单元对所述软体夹持模块进行PID调节,当压力传感器得到的数据平缓时,即认为其夹持完成,使所述软体夹持模块保持位置;
4)感知模块开启工作,发出激光束,并观测激光束是否在果梗上,如果激光束在果梗上,则感知模块发出信号至控制器,控制器发出采摘信号,驱动模块推动剪刀闭合完成剪切,完成采摘;
如果激光束不在果梗上,则感知模块重新对果梗进行识别与定位,并且将得到的二次定位数据和彩色摄像头的一次定位数据进行比较,得出偏差值,并且把偏差值传至控制器,通过控制器驱动纵向移动模块、横向移动模块和径向移动模块对剪刀的位置进行调整,调整完成后进行采摘。
上述方案智能化、自助化程度较高,能够精确的对目标果蔬进行采摘作业,采摘精度高。
附图说明
从以下结合附图的描述可以进一步理解本发明。图中的部件不一定按比例绘制,而是将重点放在示出实施例的原理上。在不同的视图中,相同的附图标记指定对应的部分。
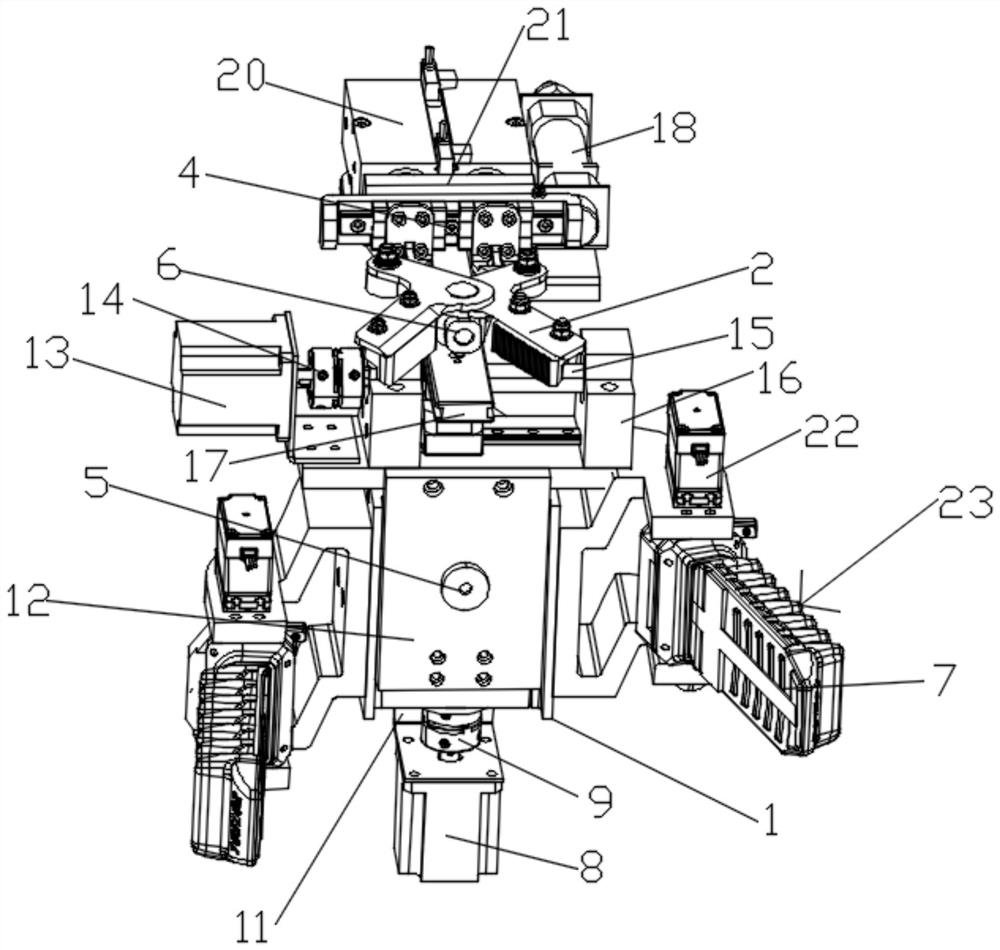
图1是本发明一实施例中的一种五自由度果蔬采摘机器人末端执行器的结构示意图之一;
图2是本发明一实施例中的一种五自由度果蔬采摘机器人末端执行器结构示意图之二;
图3是本发明一实施例中的一种五自由度果蔬采摘机器人末端执行器的工作流程图。
附图标记说明:1、安装架;2、剪刀;3、末端连接部;4、彩色摄像头;5、红外摄像头;6、激光摄像头;7、压力传感器;8、第一电机;
9、第一轴承;10、第一丝杆;11、第一安装座;12、第一滑块;13、第二电机;14、第二轴承;15、第二丝杆;16、第二安装座;17、第二滑块;18、驱动气缸;19、第一气缸固定座;20、双轴气缸;21、第二气缸固定座;22、舵机;23、软体手指;24、支架。
具体实施方式
为了使得本发明的目的、技术方案及优点更加清楚明白,以下结合其实施例,对本发明进行进一步详细说明。应当理解的是,此处所描述的具体实施方式仅用以解释本发明,并不限定本发明的保护范围。
需要说明的是,当元件被称为“固定于”另一个元件,它可以直接在另一个元件上或者也可以存在居中的元件。当一个元件被认为是“连接”另一个元件,它可以是直接连接到另一个元件或者可能同时存在居中元件。本文所使用的术语“垂直的”、“水平的”、“左”、“右”以及类似的表述只是为了说明的目的,并不表示是唯一的实施方式。
除非另有定义,本文所使用的所有的技术和科学术语与属于本发明的技术领域的技术人员通常理解的含义相同。本文中在本发明的说明书中所使用的术语只是为了描述具体的实施方式的目的,不是旨在于限制本发明。本文所使用的术语“及/或”包括一个或多个相关的所列项目的任意的和所有的组合。
本发明中所述“第一”、“第二”不代表具体的数量及顺序,仅仅是用于名称的区分。
如图1、图2所示,本发明一实施例中的一种五自由度果蔬采摘机器人末端执行器,所述末端执行器安装在机械臂上使用,包括安装架1、主控模块、感知模块、纵向移动模块、横向移动模块、径向移动模块、驱动模块、剪刀2和抓持模块,所述纵向移动模块固定于所述安装架1,所述横向移动模块设置于所述纵向移动模块,所述径向移动模块设置于所述横向移动模块,所述驱动模块与所述径向移动模块连接,所述剪刀2设置于所述驱动模块,所述抓持模块设置于所述安装架1,所述主控模块包括控制器,所述控制器采用5G信号进行通信,所述感知模块、纵向移动模块、横向移动模块、径向移动模块、驱动模块和抓持模块均与所述控制器连接。
上述方案中,本申请通过纵向移动模块、横向移动模块和径向移动模块带动剪刀2移动在3个自由度(纵向、横向、径向)上移动,加上传动机械臂自带的2个自由度(轴向转动、周向转动),本方案的剪刀2能在5个自由度上移动,解决了目前采摘机器人末端执行器剪刀2结构单一,不能移动,无法对果梗弯曲的果蔬进行采摘的问题;本申请采用感知模块和主控模块配合,解决了采摘机器人末端执行器对小物体存在一定夹取盲区的问题;本申请的末端执行器可以自主、智能的感知采摘目标,自主控制采摘目标,结构简单,使用方便。
在其中一个实施例中,所述控制器内设有STM32单片机。
在其中一个实施例中,所述感知模块包括彩色摄像头4、红外摄像头5、激光摄像头6和压力传感器7,所述彩色摄像头4设置于所述驱动模块,所述红外摄像头5设置于所述纵向移动模块,所述激光摄像头6设置于所述剪刀2,所述压力传感器7设置于所述抓持模块,所述彩色摄像头4、红外摄像头5、激光摄像头6和压力传感器7均与所述控制器连接。能够精确的对目标果蔬进行采摘作业,采摘精度高。
在其中一个实施例中,所述纵向移动模块包括第一电机8、第一轴承9、第一丝杆10、第一安装座11和第一滑块12,所述第一安装座11固定于所述安装架1,所述第一丝杆10固定于所述第一安装座11,所述第一电机8通过所述第一轴承9与所述第一丝杆10连接,所述第一滑块12设置于所述第一丝杆10。通过第一丝杆10驱动第一滑块12纵向运动,从而带动所述横着移动模块纵向运动。
在其中一个实施例中,所述横向移动模块包括第二电机13、第二轴承14、第二丝杆15、第二安装座16和第二滑块17,所述第二安装座16固定于所述第一滑块12上端,所述第二丝杆15固定于所述第二安装座16,所述第二电机13通过所述第二轴承14与所述第二丝杆15连接,所述第二滑块17设置于所述第二丝杆15。通过第二丝杆15驱动第二滑块17纵向运动,从而带动所述径向移动模块横向运动。
在其中一个实施例中,所述径向移动模块包括驱动气缸18和第一气缸固定座19,所述驱动气缸18通过所述第一气缸固定座19固定于所述第二滑块17。通过所述驱动气缸18带动所述驱动模块径向运动。
在其中一个实施例中,所述驱动模块包括双轴气缸20和第二气缸固定座21,所述第二气缸固定座21与所述驱动气缸18的动力输出轴连接,所述双轴气缸20固定于所述第二气缸固定座21。所述双轴气缸20用于推动剪刀2闭合完成剪切。
在其中一个实施例中,所述剪刀2包括第一剪刃和第二剪刃,所述第一剪刃和第二剪刃分别与所述双轴气缸20的两个动力输出端连接。
在其中一个实施例中,所述安装架1设有末端连接部3,所述末端连接部3与所述机械臂连接。
在其中一个实施例中,所述抓持模块包括至少2个抓持单元,各个所述抓持单元分别设置于所述安装架1的相对的两端,各个所述抓持单元的安装高度不同。所述抓持单元模仿人体的臂膀,完成环抱式夹取动作,相比于现有的采摘机器人末端执行器,稳定性更高,通过上下的环抱式夹取动作,确保了夹取的稳定性。
在其中一个实施例中,所述抓持单元包括支架24、舵机22和软体手指23,所述支架24固定于所述安装架1,所述软体手指23设置于所述支架24,所述舵机22的动力输出端与所述软体手指23连接。通过采用软体手指23,防止对目标产生挤压破损。
如图3所示,在其中一个实施例中,本发明还提供了一种五自由度果蔬采摘机器人末端执行器的控制方法,包括以下步骤:
1)通过彩色摄像头4对需要采摘的目标进行识别和定位,然后将数据通过5G信号传递给控制器,控制器根据数据引导机械臂对末端执行器的位置进行粗调,再通过纵向移动模块、横向移动模块和径向移动模块对剪刀2的位置进行精调;
2)通过红外摄像头5获取目标与剪刀2的距离,以及目标的轮廓大小,然后将数据通过5G信号传递给控制器,控制器通过的到的数据控制软体夹持模块对目标进行夹持;其中控制器主要是根据目标的轮廓大小信息对舵机22的张角进行调节,得到合适的夹取张角;
3)夹持时,压力传感器7将夹持时获取的压力数据通过5G信号传输至控制器,主控单元对所述软体夹持模块进行PID调节,当压力传感器7得到的数据平缓时,即认为其夹持完成,使所述软体夹持模块保持位置;
4)激光摄像头6开启工作,发出激光束,并观测激光束是否在果梗上,如果激光束在果梗上,则激光摄像头6发出信号至控制器,控制器发出采摘信号,驱动模块推动剪刀2闭合完成剪切,完成采摘;
如果激光束不在果梗上,则激光摄像头6重新对果梗进行识别与定位,并且将得到的二次定位数据和彩色摄像头4的一次定位数据进行比较,得出偏差值,并且把偏差值传至控制器,通过控制器驱动纵向移动模块、横向移动模块和径向移动模块对剪刀2的位置进行调整,调整完成后进行采摘。
上述方案智能化、自助化程度高,能够精确的对目标果蔬进行采摘作业,采摘精度高。
以上所述实施例的各技术特征可以进行任意的组合,为使描述简洁,未对上述实施例中的各个技术特征所有可能的组合都进行描述,然而,只要这些技术特征的组合不存在矛盾,都应当认为是本说明书记载的范围。
以上所述实施例仅表达了本发明的几种实施方式,其描述较为具体和详细,但并不能因此而理解为对发明专利范围的限制。应当指出的是,对于本领域的普通技术人员来说,在不脱离本发明构思的前提下,还可以做出若干变形和改进,这些都属于本发明的保护范围。因此,本发明专利的保护范围应以所附权利要求为准。
- 一种五自由度果蔬采摘机器人末端执行器及其控制方法
- 一种果蔬采摘机器人末端执行器