一种辅助定位装置及定位方法
文献发布时间:2023-06-19 11:24:21
技术领域
本发明实施例涉及汽车技术领域,尤其涉及一种辅助固定装置及定位方法。
背景技术
典型的汽车侧面零部件安装有角度要求,如汽车转向辅助系统(Turn Assist)中雷达组件的安装需要基于汽车侧面平面有一定的角度要求。
在实现本发明的过程中,发明人发现现有技术中,均是通过人工使用角度尺等测量仪器进行简单的安装位置角度及方向的测量和固定,这些方法效率低且实际给出的角度精度差,无法保证安装角度在零部件(雷达组件)角度要求的误差范围内,使得汽车的安全性能得不到保证。
因此,有必要提供一种辅助定位装置及定位方法以解决上述问题。
发明内容
本发明实施例旨在提供一种辅助定位装置及定位方法,以提高待安装雷达组件安装角度的精度,从而提高汽车的安全性能。
本发明实施例解决其技术问题采用以下技术方案:提供一种辅助定位装置包括:
第一固定器,安装于汽车一侧的前轮;
第二固定器,安装于所述汽车一侧的后轮,且所述第一固定器和所述第二固定器位于所述汽车的同一侧;
第一连接杆,连接于所述第一固定器与所述第二固定器之间,并且沿所述第一连接杆长度方向的居中线所在的竖直面与所述汽车的中轴面平行;
第二连接杆,垂直于所述第一连接杆设置;
水平参考杆,安装于所述第二连接杆并可绕所述第二连接杆转动,且沿所述水平参考杆长度方向的居中线所在的水平面垂直于沿所述第一连接杆的长度方向的居中线所在的水平面;
激光器,活动安装于所述水平参考杆上,所述激光器用于向下发射激光以在位于所述激光器下的物体上形成激光线,所述激光器相对于所述第一连接杆的水平角度可被调节为待安装雷达组件安装于所述汽车一侧时,所述待安装雷达组件的能量收发面相对于所述汽车的中轴面的角度,所述激光器相对于所述第一连接杆的水平角度为在沿所述第一连接杆长度方向的居中线所在的水平面内所述激光器发射的激光线方向与沿所述第一连接杆长度方向的居中线的角度。
在一些实施例中,所述激光器可相对所述水平参考杆水平转动。
在一些实施例中,所述激光器可沿所述水平参考杆长度方向的居中线滑动。
在一些实施例中,所述水平参考杆可沿所述第二连接杆的长度方向相对所述第二连接杆滑动。
在一些实施例中,所述水平参考杆包括移动部和自所述移动部垂直延伸的转动部,所述移动部套设于所述第二连接杆,所述移动部可沿所述第二连接杆的长度方向相对所述第二连接杆滑动,所述转动部可相对所述第二连接杆转动,所述激光器活动安装于所述转动部。
在一些实施例中,所述辅助定位装置包括第一锁紧机构,所述第一锁紧机构可将所述水平参考杆相对所述第二连接杆锁紧,以限制所述水平参考杆相对于所述第二连接杆移动。
在一些实施例中,所述第一锁紧机构包括锁紧环、第一锁紧螺栓及第一锁紧螺母;
所述锁紧环的两端设有供所述第一锁紧螺栓穿过的第一过孔及第一通孔,所述第一锁紧环套设于所述移动部,所述第一锁紧螺母用于在所述第一锁紧螺栓穿过所述第一过孔及第一通孔后与所述第一锁紧螺栓配合。
在一些实施例中,在所述水平参考杆与所述第二连接杆的连接处,所述水平参考杆与所述第二连接杆二者之一设置有第一弧形刻度,另一者设置有第一参考指示线。
在一些实施例中,所述辅助定位装置还包括第二锁紧机构,所述第二锁紧机构用于将所述激光器相对于所述水平参考杆锁紧,以限制所述激光器相对于所述水平参考杆活动。
在一些实施例中,所述第二锁紧机构包括锁紧板、第二锁紧螺栓及第二锁紧螺母,所述锁紧板固定于所述激光器,所述锁紧板上设置有供所述第二锁紧螺栓穿过的弧形孔,所述水平参考杆上设置有供所述第二锁紧螺栓穿过的滑槽,所述第二锁紧螺母用于在所述第二锁紧螺栓穿过所述弧形孔及滑槽后与所述第二锁紧螺栓配合;
其中,所述第二螺栓可沿所述弧形孔的弧度方向滑动,且所述弧形孔的弧度之和大于或等于180度。
在一些实施例中,所述水平参考杆上套设有滑块,所述滑块可沿所述水平参考杆长度方向滑动,所述滑块上设置有供所述第二锁紧螺栓穿过的第二过孔,所述第二锁紧螺栓穿过所述弧形孔、第二过孔及滑槽后与所述第二锁紧螺母配合;
其中,所述第二锁紧螺母旋紧时与所述滑块抵接。
在一些实施例中,所述弧形孔上设置有第二弧形刻度,所述第二锁紧螺栓上设置有第二参考指示线。
在一些实施例中,所述第一固定器包括第一安装座及两个第一卡爪组件,两个所述第一卡爪组件卡接于所述前轮的轮毂,所述第一安装座位于两个所述第一卡爪组件的中心位置,所述第一固定杆的第一端安装于所述第一安装座;
所述第二固定器包括第二安装座及两个第二卡爪组件,所述第二安装座位于两个所述第二卡爪组件的中心位置,两个所述第二卡爪组件卡接于所述后轮的轮毂,所述第一固定杆的第二端安装于所述第二安装座。
本发明实施例还提供一种辅助定位方法,包括上述的辅助定位装置,所述方法包括:
调整所述第一固定器和第二固定器,确保沿所述第一连接杆长度方向的居中线所在的竖直面平行于所述汽车的中轴面;
转动所述激光器,直至所述激光器发射的激光在所述水平参考杆上的激光线方向与所述水平参考杆长度方向的居中线平行;
转动所述水平参考杆,直至所述激光器发射的激光在所述第一连接杆上的激光线方向与所述第一连接杆长度方向的居中线平行,并记该位置为零点位置;
获取所述待安装雷达组件安装于所述汽车一侧时,所述待安装雷达组件的能量收发面相对于所述汽车中轴面的安装角度及安装方向;
根据所述安装方向和安装角度,调整所述水平参考杆,以使所述水平参考杆和第一连接杆之间的夹角与所述安装角度相同,以及,所述水平参考杆相对于所述第一连接杆的偏转方向与所述安装方向相同,其中,所述第一连接杆和调整后的所述水平参考杆用于辅助安装所述待安装雷达组件。
在一些实施例中,所述根据所述安装方向和安装角度,调整所述水平参考杆,以使所述水平参考杆和第一连接杆的夹角与所述安装角度相同的步骤,进一步包括:
将所述激光器朝与所述安装方向相反的方向水平转动所述安装角度;
转动所述水平参考杆,直至所述激光器发射的激光在所述第一连接杆上的激光线方向与所述第一连接杆长度方向的居中线平行。
本发明实施例的有益效果:
本发明实施例提供的一种辅助定位装置及定位方法通过调节激光器和水平参考杆即可确定待安装雷达组件安装于汽车一侧的侧面安装位置。
附图说明
一个或多个实施例通过与之对应的附图中的图片进行示例性说明,这些示例性说明并不构成对实施例的限定,附图中具有相同参考数字标号的元件表示为类似的元件,除非有特别申明,附图中的图不构成比例限制。
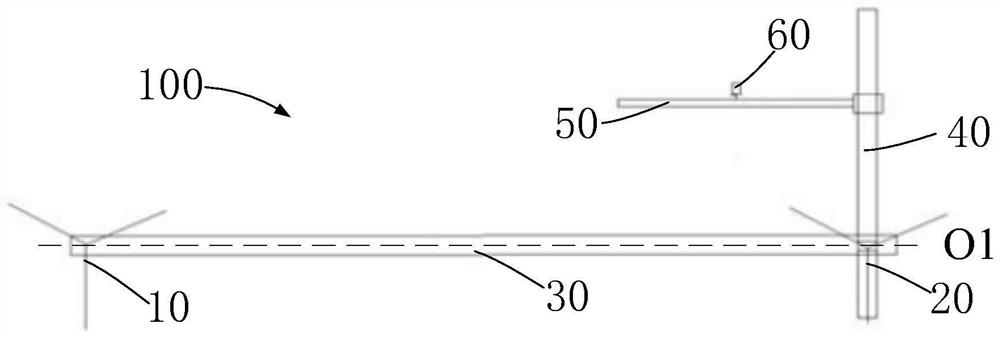
图1是本发明其中一实施例提供的一种辅助定位装置的平面示意图;
图2是图1所示的辅助定位装置中第一固定器的应用场景示意图;
图3是图1所示的辅助定位装置中第一固定器的结构示意图;
图4是图1所示的辅助定位装置中第二固定器的结构示意图;
图5是图3所示的第一固定器中第一驱动模块的结构示意图;
图6是图1所示的辅助定位装置中水平参考杆与第二连接杆的安装示意图;
图7是图1所示的辅助定位装置中水平参考杆与第二连接杆的又一安装示意图;
图8是图1所示的辅助定位装置中水平参考杆与激光器的安装示意图;
图9是图1所示的辅助定位装置中水平参考杆与激光器的又一安装示意图;
图10是本发明又一实施例提供的一种辅助定位方法的流程示意图;
图11是图10所示的辅助定位方法中步骤S50的子流程示意图。
具体实施方式
为了便于理解本发明,下面结合附图和具体实施例,对本发明进行更详细的说明。需要说明的是,当元件被表述“固定于”另一个元件,它可以直接在另一个元件上、或者其间可以存在一个或多个居中的元件。当一个元件被表述“连接”另一个元件,它可以是直接连接到另一个元件、或者其间可以存在一个或多个居中的元件。本说明书所使用的术语“上”、“下”、“内”、“外”、“垂直的”、“横向的”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。此外,术语“第一”、“第二”等仅用于描述目的,而不能理解为指示或暗示相对重要性。
除非另有定义,本说明书所使用的所有的技术和科学术语与属于本发明的技术领域的技术人员通常理解的含义相同。在本发明的说明书中所使用的术语只是为了描述具体的实施例的目的,不是用于限制本发明。本说明书所使用的术语“和/或”包括一个或多个相关的所列项目的任意的和所有的组合。
此外,下面所描述的本发明不同实施例中所涉及的技术特征只要彼此之间未构成冲突就可以相互结合。
请参阅图1,为本发明实施例提供的一种辅助定位装置,包括第第一固定器10、第二固定器20、第一连接杆30、第二连接杆40、水平参考杆50及激光器60,所述第一固定器10安装于汽车一侧的前轮(如图2所示),所述第二固定器20安装于所述汽车一侧的后轮,且所述第一固定器10和所述第二固定器20位于所述汽车的同一侧,所述第一连接杆30连接于所述第一固定器10与所述第二固定器20之间,并且沿所述第一连接杆30长度方向的居中线O1所在的竖直面与所述汽车的中轴面平行。所述第二连接杆40垂直于所述第一连接杆30设置。所述水平参考杆50安装于所述第二连接杆40并可绕所述第二连接杆40转动,且沿所述水平参考杆50长度方向的居中线所在的水平面与所述汽车的中轴面垂直。所述激光器60活动安装于所述水平参考杆50上,所述激光器60用于向下发射激光以在位于所述激光器60下的物体上形成激光线,所述激光器60相对于所述水平参考杆50的水平角度可被调节为待安装雷达组件安装于所述汽车一侧时,所述待安装雷达组件的能量收发面相对于所述汽车的中轴面的角度,所述激光器60相对于所述第一连接杆30的水平角度为在沿所述第一连接杆30长度方向的居中线所在的水平面内所述激光器60发射的激光线方向与沿所述第一连接杆30长度方向的居中线的角度。
需要说明的是:所述汽车的中轴面是指:垂直于地面且经过汽车两前轮中点及两后轮中点的平面。
所述待安装雷达组件的能量收发面是指:雷达的天线面或者与雷达的天线面平行的平面。
可以理解,所述汽车一侧包括汽车后视镜下方,或者汽车侧护栏处。
请一并参阅图3和图4,在一些实施例中,所述第一固定器10和第二固定器20可为相同结构,均可以为轮毂夹持装置,例如,所述第一固定器10包括第一安装座110、两个第一卡爪组件120、第一驱动模块130及第一锁紧模块140,所述第一安装座110位于两个所述第一卡爪组件120的中心位置,所述第一连接杆30的第一端安装于所述第一安装座110,两个所述第一卡爪组件120卡接于所述前轮的轮毂,两个所述第一卡爪组件120安装于所述第一驱动模块130,所述第一驱动模块130用于同步驱动两个所述第一卡爪组件120移动,使得两个所述第一卡爪组件120可相对所述第一安装座110同步相向或相背运动,以适应不同大小的轮毂,所述第一锁紧模块140用于锁紧所述第一驱动模块130,以确保两个所述第一卡爪组件120固定不动。
所述第二固定器20包括第二安装座210、两个第二卡爪组件220、第二驱动模块230及第二锁紧模块240,所述第二安装座210位于两个所述第二卡爪组件220的中心位置,所述第一连接杆30的第二端安装于所述第二安装座210,两个所述第二卡爪组件220卡接于所述后轮的轮毂,两个所述第二卡爪组件220安装于所述第二驱动模块230,所述第二驱动模块230用于同步驱动两个所述第二卡爪组件220移动,使得两个所述第二卡爪组件220可相对所述第二安装座210同步相向或相背运动,以适应不同大小的轮毂,所述第二锁紧模块240用于锁紧所述第二驱动模块230,以确保两个所述第二卡爪组件220固定不动。
所述第一驱动模块130和第二驱动模块230可为丝杆机构,本文以第一驱动模块130为例进行说明。
例如所述第一驱动模块130包括导向组件及驱动件131,所述导向组件用于引导两个所述第一卡爪组件120移动,所述驱动件131用于同步驱动两个所述第一卡爪组件120相互靠近或远离。
具体地,请参阅图5,所述驱动件131可为驱动杆,包括左旋螺纹部、右旋螺纹部以及连接部,所述连接部连接所述左旋螺纹部以及右旋螺纹部,所述左旋螺纹部以及右旋螺纹部相对设置。其中,所述左旋螺纹部设有左旋螺纹,所述右旋螺纹部设有右旋螺纹,一所述第一卡爪组件120螺接于所述左旋螺纹部,另一所述第一卡爪组件120螺接于所述右旋螺纹部,由此,当转动所述驱动件131时,两个所述第一卡爪组件120同步移动相同的距离,以确保所述第一安装座110始终处于两个所述第一卡爪组件120的正中间,确保所述第一安装座110的中心轴线与其安装轮毂的中心轴线重合。
所述导向组件包括第一导向柱132、第二导向柱133以及连接块134,所述第一导向柱132和第二导向柱133分别位于所述驱动件131的两侧,一所述第一卡爪组件120安装于所述第一导向柱132以及第二导向柱133的一端,另一所述第一卡爪组件120安装于所述第一导向柱132以及第二导向柱133的另一端。
所述驱动件131与所述连接块134连接。具体的来说,所述第一导向柱132的一端依次穿过两个所述第一卡爪组件120后与所述连接块134连接,所述第一导向柱132的另一端与所述锁紧模块140连接,同样的,所述第二导向柱133的一端依次穿过两个所述第一卡爪组件120后与所述连接块134的另一端连接,并且,所述第一导向柱132与所述第二导向柱133相互平行。由此,两个所述第一卡爪组件120可沿着所述第一导向柱132以及所述第二导向柱133移动,以确保两个所述第一卡爪组件120沿着预设路径移动。
所述驱动件131的一端与所述连接块134连接,另一端与所述锁紧模块140连接。
可以理解,所述导向组件210除了上述的第一导向柱132、第二导向柱133以及连接块134的形式以外,还可以是至少两对滑块与两个导轨的方式,例如滑块固定第一卡爪组件上,滑块滑动连接于导轨。
对于所述第一锁紧模块140结构,本申请实施例不予任何限制,只要能限制所述驱动件131转动即可。
所述第一连接杆30的第一端安装于所述第一安装座110,所述第一连接杆30的第二端安装于所述第二安装座210,具体的,所述第一安装座110上设置有用于安装所述第一连接杆30的第一安装孔,所述第一安装孔与所述第一安装座110的中心轴同轴;所述第二安装座210上设置有用于安装所述第一连接杆30的第二安装孔,所述第二安装孔与所述第二安装座210的中心轴同轴,从而保证所述第一固定杆30长度方向的居中线所在的竖直面与所述汽车的中轴面平行。
所述第一安装孔和第二安装孔可均为螺纹孔,所述第一连接杆30的两端可分别设置有螺纹,通过第一连接杆30与第一安装孔及第二安装孔的配合以使所述第一连接杆30固定于所述第一安装座110与第二安装座120之间。
当然,所述第一固定器10和第二固定器20的结构也可不同,只要满足所述第一固定器10和第二固定器20能卡接于汽车的轮毂,且沿所述第一连接杆30长度方向的居中线所在的竖直面与所述汽车的中轴面平行即可。
在一些实施例中,所述第二连接杆40安装于所述第二安装座120且与所述第一连接杆30垂直。在其他一些实施例中,所述第二连接杆40可安装于地面或其他装置,只要保证所述第二连接杆40与所述第一连接杆30垂直即可,对此本申请实施例不作任何限制。
在一些实施例中,所述水平参考杆50仅可绕所述第二连接杆40转动,或者,所述水平参考杆50既可绕所述第二连接杆40转动,又可沿所述第二连接杆40的长度方向相对于所述第二连接杆40滑动。
所述水平参考杆50可为L型、T型或直线型等结构。
本申请以所述水平参考杆50为T型为例进行说明。
请参阅图6,所述水平参考杆50包括移动部510及沿所述移动部510垂直延伸的转动部520,所述移动部510套设于所述第二连接杆40且可绕所述第二连接杆40转动,所述激光器60活动安装于所述转动部520。
可以理解,在所述移动部510的一端为封闭端,另一端为开放端时,所述移动部510套设于所述第二连接杆40且所述移动部510的封闭端与所述第二连接杆40的顶部抵接,此时,所述水平参考杆50仅可绕所述第二连接杆40转动;在所述移动部510的两端均为开放端时,所述移动部510套设于所述第二连接杆40且可以沿所述第二连接杆40滑动,此时,所述水平参考杆50既可绕所述第二连接杆40转动,又可沿所述第二连接杆40的长度方向相对于所述第二连接杆40滑动。
本文以所述水平参考杆50既可绕所述第二连接杆40转动,又可沿所述第二连接杆40的长度方向相对于所述第二连接杆40滑动为例进行说明。
在一些实施例中,所述辅助定位装置包括第一锁紧机构70,所述第一锁紧机构70可将所述水平参考杆50相对所述第二连接杆40锁紧,以限制所述水平参考杆50相对于所述第二连接杆40移动,
需要说明的是:限制所述水平参考杆50相对于所述第二连接杆40移动是指:限制所述平参考杆50相对于所述第二连接杆40转动及滑动。
所述第一锁紧机构70包括锁紧环、第一锁紧螺栓及第一锁紧螺母,所述第一锁紧环套设于所述移动部510,所述锁紧环的两端设有供所述第一锁紧螺栓穿过的第一过孔及第一通孔,所述第一锁紧螺母用于在所述第一锁紧螺栓穿过所述第一过孔及第一通孔后与所述第一锁紧螺栓配合。
在所述第一锁紧螺母拧紧时,所述第一锁紧机构70实现对所述水平参考杆50的锁紧;在所述水平参考杆50需相对于所述第二连接杆40转动或滑动时,旋松所述第一锁紧螺栓即可。
值得说明的是,在一些实施例中,所述第一锁紧环可省略,所述移动部设置成开环结构,所述开环结构构成上述的锁紧环,如图7所示。
可以理解,所述第一锁紧机构70也可为其他机构,例如所述第一锁紧机构包括两个锁紧螺母,所述连接杆40的外表面设置有螺纹,两个锁紧螺母分别螺接于所述连接杆的两端,所述移动部位于两个螺母之间,当两个螺母相对旋紧并与所述移动部抵接时,即可对所述水平参考杆50进行锁紧,当所述水平参考杆50需相对于所述第二连接杆40转动或滑动时,旋松两个锁紧螺母,此时,所述水平参考杆可绕所述第二连接杆40转动,且所述水平参考杆可沿所述第二连接杆40在两个锁紧螺母之间滑动。
可以理解,所述第一锁紧机构70的结构形式不限于本申请实施例,其他能限制所述水平参考杆50转动及滑动的方式均包含在本申请实施例中。
在一些实施例中,在所述水平参考杆50与所述第二连接杆40相连接处,所述水平参考杆50与所述第二连接杆二者之一设置有第一弧形刻度,另一者设置有第一参考指示线O2,例如,所述移动部510上设置有所述第一弧形刻度,所述第二连接杆40上设置有所述第一参考指示线O2(所述第一参考指示线O2可为位于所述第二连接杆40的外表面的直线,并从所述第二连接杆的顶部延伸至所述第二连接杆的底部,如图6所示),从而在所述水平参考杆50相对所述第二连接杆40转动时,可根据所述第一参考指示线O2及所述移动部上的第一弧形刻度知道所述水平参考杆50转动的角度。
在一些实施例中,所述第一参考指示线O2上设置有距离刻度,从而在所述水平参考杆50相对所述第二连接杆40滑动时,可根据所述第一参考指示线O2上的距离刻度知道所述水平参考杆50滑动的距离。
可以理解,也可将所述第一参考指示线O2设置于所述移动部,所述第二连接杆40上设置弧形刻度,为方便观察,该弧形刻度从所述第二连接杆的顶部延伸至第二连接杆的底部。
通过所述水平参考杆50相对于所述第二连接杆40的移动,可以调节所述激光器60相对于所述第一连接杆30的水平角度。
所述激光器60活动安装于所述水平参考杆50上,在本发明实施例中,所述激光器60活动安装于所述水平参考杆50上,是指所述激光器60可相对所述水平参考杆50水平转动。
例如,所述激光器60可相对所述水平参考杆50水平转动,所述辅助定位装置还包括第二锁紧机构80,所述第二锁紧机构80用于将所述激光器60相对于所述水平参考杆50锁紧,以限制所述激光器60相对于所述水平参考杆50活动(如水平转动)。
所述激光器60相对于所述水平参考杆50水平转动及锁紧的机构可为同一机构,例如,所述第二锁紧机构80包括锁紧板81、第二锁紧螺栓82及第二锁紧螺母,所述锁紧板81连接于所述激光器60,所述锁紧板81与所述汽车的中轴面垂直,所述锁紧板81上设置有供所述第二锁紧螺栓82穿过的弧形孔811,所述水平参考杆50上设置有供所述第二锁紧螺栓82穿过的滑槽530,所述第二锁紧螺栓82可沿所述滑槽530滑动,所述滑槽530沿所述水平参考杆50的长度方向设置,所述第二锁紧螺母用于在所述第二锁紧螺栓82穿过所述弧形孔811及滑槽530后与所述第二锁紧螺栓82配合。其中,所述第二锁紧螺栓82可沿所述弧形孔811的弧度方向滑动,且所述弧形孔811的弧度之和大于或等于180度,通过所述第二锁紧螺栓82沿所述弧形孔811的弧度方向滑动,从而可以调节所述激光器60相对于所述水平参考杆50的水平角度。
在所述第二锁紧螺母旋紧时可实现所述激光器60相对于所述水平参考杆50的锁紧,在所述激光器60需相对所述水平参考杆50水平转动时,旋松所述第二锁紧螺母即可。
可以理解,所述激光器60与所述锁紧板81的连接可为固定连接或活动连接,例如所述激光器60固定连接于所述锁紧板81,或所述激光器60活动连接于所述锁紧板81,如铰接。当所述激光器活动连接(如铰接)于所述锁紧板81时,所述激光器在外力作用下才可相对所述锁紧板81活动。
在一些实施例中,所述弧形孔811上设置有第二弧形刻度,所述第二锁紧螺栓82上设置有第二参考指示线,通过所述弧形孔811上的第二弧形刻度及第二参考指示线,可知道所述激光器60相对所述水平参考杆50转动的水平角度。
在一些实施例中,所述激光器60还可沿所述水平参考杆50的长度方向滑动,为限制所述激光器60沿其他方向滑动,所述水平参考杆50的转动部520为方形结构,所述锁紧板81平行于所述转动部520的顶面,所述转动部520上套设有滑块90,所述滑块90可沿所述水平参考杆50的长度方向滑动,所述滑块90上设置有供所述第二锁紧螺栓82穿过的第二过孔,所述第二锁紧螺栓穿过所述弧形孔、第二过孔及滑槽530后与所述第二锁紧螺母配合,在所述第二锁紧螺母旋紧时,所述锁紧板81与所述滑块90保持相对固定,所述滑块90可带动所述第二锁紧装置80及激光器60沿所述水平参考杆50的长度方向滑动。
值得说明的是,在所述第二锁紧螺母旋紧时,所述第二锁紧螺母与所述滑块抵接。
为确保所述滑块从所述水平参考杆的顶部取出,所述水平参考杆的侧面及与所述滑块与所示水平参考的侧面相对的一侧面的二者之一设置有凸筋,另一者设置有收容所述凸筋的凹槽,所述凸筋可沿所述凹槽滑动。
可以理解,所述滑块80在外力作用下才可以沿所述水平参考杆的长度方向滑动。
在其他一些实施例中,所述锁紧板81可以省略,如图9所示,所述第二锁紧机构80包括第二锁紧螺栓82及第二锁紧螺母,所述激光器60安装于所述第二锁紧螺栓82上,所述第二锁紧螺栓穿过所述第二过孔及滑槽530后与所述第二锁紧螺母配合,转动所述第二锁紧螺栓即可调节所述激光器60相对所述水平参考杆50的水平角度。此种方式下,在所述第二螺栓82和所述滑块90的连接处,所述第二锁紧螺栓82和所述滑块90二者之一设置有第二弧形刻度,另一者设置有第二参考指示线。同样,所述激光器60可活动安装于所述第二锁紧螺栓82也可固定安装于所述第二锁紧螺栓82。
所述激光器60可沿所述水平参考杆50滑动是为了使所述激光器60发射的激光能在所述第一连接杆30上形成激光线,避免所述激光器60向下发射激光时,因所述水平参考杆50的遮挡无法在所述第一连接杆30上形成激光线。
当然,为保证所述激光器60发射的激光能在所述第一连接杆30上形成激光线,所述第一连接杆的长度要大于所述水平参考杆50转动部520的长度。
应当理解,所述激光器60相对于所述水平参考杆50活动及锁紧的机构不限于本申请实施例,其他能使激光器相对所述水平参考杆活动及锁紧的机构均包含在本申请实施例中。
具体实施时,旋松所述第二锁紧螺母,转动所述激光器60,直至所述激光器60在所述水平参考杆50上的激光线方向与所述水平参考杆50长度方向的居中线平行,旋紧所述第二锁紧螺母,记录此时所述第二参考指示线相对于所述第二弧形刻度的角度,记为A1;旋松所述第一锁紧螺母,转动所述水平参考杆50,直至所述激光器60发射的激光在所述第一连接杆30上的激光线方向与所述第一连接杆30长度方向的居中线O1平行,旋紧所述第二锁紧螺母,记录此时所述第一参考指示线O2相对于所述第一弧形刻度的角度为B1,并指定该位置为零点位置;获取所述待安装雷达组件的能量收发面相对于所述汽车中轴面的安装角度及安装方向,旋松所述第二锁紧螺母,将所述激光器60朝与所述安装方向相反的方向水平转动所述安装角度,旋紧所述第二锁紧螺母,记录此时第二参考指示线相对于所述第二弧形刻度的角度,记为A2;旋松所述第一锁紧螺母,再转动所述水平参考杆50,直至所述激光器60发射的激光在所述第一连接杆30上的激光线方向与所述第一连接杆30的长度方向的居中线平行,旋紧所述第二锁紧螺母,记录此时第一参考指示线O2相对于所述第一弧形刻度的角度为B2。
此时,根据所述水平参考杆50相对于所述第一连接杆30的位置即可确定所述待安装雷达组件安装于所述汽车一侧的侧面位置,即雷达组件的能量收发面相对于汽车一侧的角度被确定。
可以理解,A1与A2之差及B1与B2之差均为所述安装角度。
在上述实施方式中,可以根据需求滑动所述滑块90。
请一并参阅图10和图11本申请实施例提供的一种辅助定位方法,包括上述的辅助定位装置,用于辅助安装上述的待安装雷达组件。
步骤S10、调整所述第一固定器10和第二固定器20,确保沿所述第一连接杆30长度方向的居中线所在的竖直面平行于所述汽车的中轴面;
步骤S20、转动所述激光器60,直至所述激光器发射的激光在所述水平参考杆50上的激光线方向与所述水平参考杆长度方向的居中线平行;
步骤S30、转动所述水平参考杆50,直至所述激光器60发射的激光在所述第一连接杆30上的激光线方向与所述第一连接杆30长度方向的居中线平行,并记该位置为零点位置;
步骤S40、获取所述待安装雷达组件安装于所述汽车一侧时,所述待安装雷达组件的能量收发面相对于所述汽车中轴面的安装角度及安装方向;
需要说明的是,所述待安装雷达组件的能量收发面相对于所述汽车中轴面的安装角度是指:所述激光器60相对于所述第一连接杆30的水平角度。所述待安装雷达组件的能量收发面相对于所述汽车中轴面的安装方向是指:所述激光器相对于所述第一连接杆的偏转方向。其中,所述激光器60相对于所述第一连接杆30的水平角度为在沿所述第一连接杆30长度方向的居中线所在的水平面内所述激光器发射的激光线方向与沿所述第一连接杆长度方向的居中线O1的角度。
步骤S50、根据所述安装方向和安装角度,调整所述水平参考杆50,以使所述水平参考杆50和第一连接杆30之间的夹角与所述安装角度相同,以及,所述水平参考杆50相对于所述第一连接杆30的偏转方向与所述安装方向相同。
需要说明的是,所述第一连接杆30和调整后的所述水平参考杆50用于辅助安装所述待安装雷达组件。
需要说明的是,所述根据所述安装方向和安装角度,调整所述水平参考杆50,以使所述水平参考杆50和第一连接杆之间的夹角与所述安装角度相同的步骤,进一步包括:
步骤S510、将所述激光器60朝与所述安装方向相反的方向水平转动所述安装角度;
步骤S520、转动所述水平参考杆50,直至所述激光器60发射的激光在所述第一连接杆上的激光线方向与所述第一连接杆长度方向的居中线平行。
本发明实施例提供的一种辅助定位装置及方法,通过调整激光器和水平参考杆即可确定待安装雷达组件安装于所述汽车一侧的侧面的安装位置。操作简单,方便快捷,且安装精度高。
最后应说明的是:以上实施例仅用以说明本发明的技术方案,而非对其限制;在本发明的思路下,以上实施例或者不同实施例中的技术特征之间也可以进行组合,步骤可以以任意顺序实现,并存在如上所述的本发明的不同方面的许多其它变化,为了简明,它们没有在细节中提供;尽管参照前述实施例对本发明进行了详细的说明,本领域的普通技术人员应当理解:其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分技术特征进行等同替换;而这些修改或者替换,并不使相应技术方案的本质脱离本发明各实施例技术方案的范围。
- 一种辅助定位装置及包含该辅助定位装置的网框固定装置
- 一种移动设备的辅助定位装置及其辅助定位方法