驱动系统
文献发布时间:2023-06-19 11:26:00
相关申请的援引
本申请以2018年11月9日申请的日本专利申请第2018-211782号为基础,在此援引其记载内容。
技术领域
本公开涉及一种驱动系统。
背景技术
以往,已知有对具有开放三角型的绕组的旋转电机的驱动进行控制的驱动系统(例如,专利文献1)。在该驱动系统中,在构成旋转电机的各相的绕组的两端中的第一端连接有第一逆变器,在第二端连接有第二逆变器。此外,第一逆变器的高电位侧和第二逆变器的高电位侧通过高电位侧连接线连接,并且第一逆变器的低电位侧和第二逆变器的低电位侧通过低电位侧连接线连接。在高电位侧连接线以及低电位侧连接线设置有切换开关,通过对该切换开关的状态进行切换,对第一逆变器和第二逆变器的驱动进行切换。
现有技术文献
专利文献
专利文献1:日本专利特开2016-181949号公报
发明内容
作为第一逆变器和第二逆变器的上臂开关和下臂开关,使用开关速度比较快的半导体开关。为了同步地对切换开关的状态与第一逆变器及第二逆变器的驱动进行切换,有时使用半导体开关作为切换开关。然而,由于半导体开关具有相对较大的接通电阻,因此,设置有切换开关的连接线的导通损耗增加,由此产生驱动系统的电力损耗增大的问题。
本公开是鉴于上述情况而作出的,其目的在于提供一种能够对驱动系统的电力损耗进行抑制的驱动系统。
本公开是一种驱动系统,上述驱动系统应用于包括具有多相的绕组的旋转电机系统,上述驱动系统包括:第一逆变器,上述第一逆变器针对每相具有串联连接的上臂开关和下臂开关,并且上述上臂开关和下臂开关的连接点与各相的绕组的两端中的第一端连接;第二逆变器,上述第二逆变器针对每相具有串联连接的上臂开关和下臂开关,并且上述上臂开关和下臂开关的连接点与上述各相的绕组的两端中的第二端连接;高电位侧连接线,上述高电位侧连接线将上述第一逆变器的高电位侧与上述第二逆变器的高电位侧连接;低电位侧连接线,上述低电位侧连接线将上述第一逆变器的低电位侧与上述第二逆变器的低电位侧连接;第一切换开关,上述第一切换开关是设置于上述高电位侧连接线和上述低电位侧连接线中的至少一方的半导体开关;第二切换开关,上述第二切换开关是与上述第一切换开关并联连接的继电器开关;模式控制部,上述模式控制部对第一模式与第二模式进行切换,在上述第一模式中,对上述第一逆变器和上述第二逆变器中的、一方的逆变器的上臂开关和下臂开关实施开关驱动,并且实施将另一方的逆变器的上臂开关和下臂开关中的至少一方维持于接通状态的中性点驱动,在上述第二模式中,对两方的逆变器的上臂开关和下臂开关实施开关驱动;以及切换控制部,上述切换控制部在上述模式控制部进行上述第一模式与上述第二模式的切换时,对上述第一切换开关和上述第二切换开关的接通状态和断开状态进行切换。
在本公开的驱动系统中,在分别连接有旋转电机所具有的各相的绕组的两端的第一逆变器和第二逆变器中,能够切换为第一模式和第二模式,在进行第一模式与第二模式的切换时,对与高电位侧连接线和低电位侧连接线中的至少一方并联连接的第一切换开关及第二切换开关的接通状态与断开状态进行切换。第一切换开关是半导体开关,与继电器开关相比,切换的响应性优异。另外,第二切换开关是继电器开关,与半导体开关相比接通电阻较小,并且能够对设置有这些开关的连接线的导通损耗进行抑制。其结果是,在驱动系统中,能够较高地维持第一模式与第二模式的切换时的响应性,并且抑制电力损耗。
附图说明
参照附图和以下详细的记述,可以更明确本公开的上述目的、其他目的、特征和优点。附图如下所述。
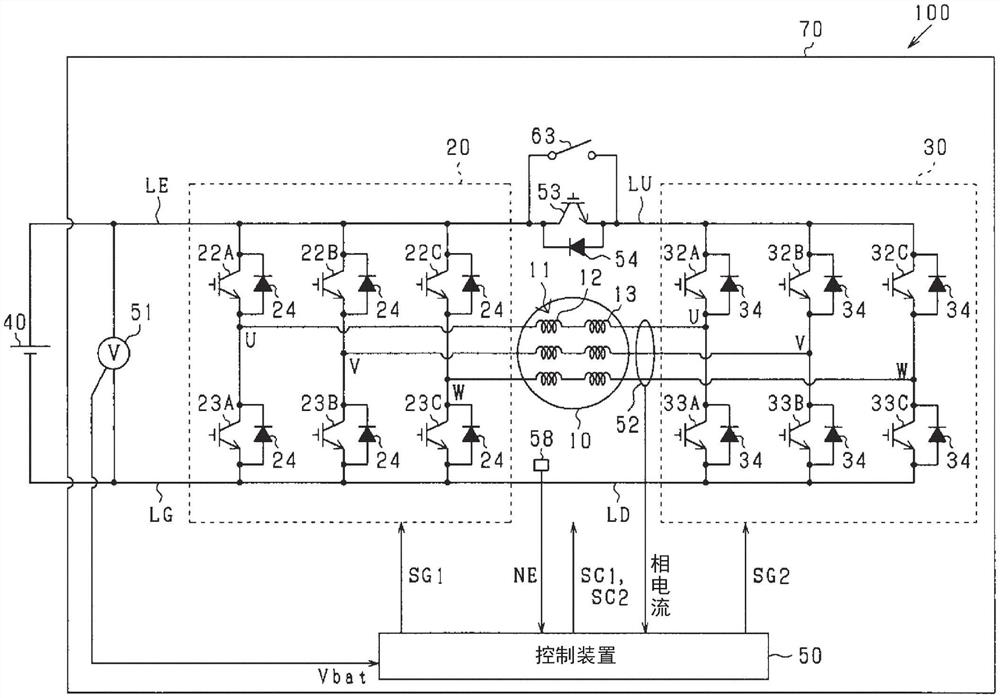
图1是第一实施方式的驱动系统的整体结构图。
图2是表示第二模式下的电流路径的图。
图3是表示第一模式的第一星形连接驱动时的电流路径的图。
图4是第一实施方式的切换控制处理的流程图。
图5是表示切换控制处理中的第一切换开关和第二切换开关的状态的推移的图。
图6是表示第一动作条件CN1和第二动作条件CN2的关系的图。
图7是第二实施方式的驱动系统的整体结构图。
图8是表示第一模式的第二星形连接驱动时的电流路径的图。
图9是第二实施方式的切换控制处理的流程图。
图10是第三实施方式的驱动系统的整体结构图。
图11是第四实施方式的驱动系统的整体结构图。
具体实施方式
(第一实施方式)
以下,参照附图,对将本公开的驱动系统应用于车载的旋转电机系统100的第一实施方式进行说明。
如图1所示,本实施方式的驱动系统70包括旋转电机10、第一逆变器20、第二逆变器30、以及将旋转电机10作为控制对象的控制装置50。
旋转电机10具有再生发电以及动力运行驱动的功能,具体而言,是MG(MotorGenerator:电动发电机)。在旋转电机10与电池40之间进行电力的输入输出,在动力运行时,通过从电池40供给的电力对车辆施加推进力,在再生时,使用车辆的减速能量进行发电,并将电力输出至电池40。
旋转电机10具有开放三角型的三相绕组11。绕组11是与U相、V相、以及W相的各相对应的多相绕组。各相的绕组11包括串联连接的第一绕组部12和第二绕组部13。旋转电机10的转子被连接成能与车辆的驱动轮传递动力。旋转电机10是例如同步机。
旋转电机10的各相的绕组11经由第一逆变器20与作为直流的电源部的电池40连接。电池40是能充放电的蓄电池,具体而言,是串联连接多个锂离子蓄电池的组电池。另外,电池40也可以是其他种类的蓄电池。另外,在本实施方式中,电池40相当于“蓄电装置”。
第一逆变器20是高电位侧的开关元件即上臂开关22(22A、22B、22C)以及低电位侧的开关元件即下臂开关23(23A、23B、23C)的串联连接体并联连接而构成的。在各相中,在上臂开关22与下臂开关23的连接点处连接有旋转电机10的对应相的绕组11的第一端。另外,在本实施方式中,作为开关22、23,使用电压控制型的半导体开关元件,更具体而言,使用IGBT。在各开关分别反向并联连接有续流二极管24。
第二逆变器30是高电位侧的开关元件即上臂开关32(32A、32B、32C)以及低电位侧的开关元件即下臂开关33(33A、33B、33C)的串联连接体并联连接而构成的。在各相中,在上臂开关32与下臂开关33的连接点处连接有旋转电机10的对应相的绕组11的第二端。另外,在本实施方式中,作为开关32、33,使用电压控制型的半导体开关元件,更具体而言,使用IGBT。在各开关分别反向并联连接有续流二极管34。
电池40的高电位侧与第一逆变器20的高电位侧通过电源线LE连接,电池40的低电位侧与第一逆变器20的低电位侧通过接地线LG连接。此外,第一逆变器20的高电位侧与第二逆变器30的高电位侧通过高电位侧连接线LU连接,第一逆变器20的低电位侧与第二逆变器30的低电位侧通过低电位侧连接线LD连接。由此,第二逆变器30经由第一逆变器20与电池40连接。
在高电位侧连接线LU上设置有第一切换开关53。在本实施方式中,作为第一切换开关53,使用电压控制型的半导体开关元件,更具体而言,使用IGBT。在第一切换开关53,以电流从第二逆变器30流向第一逆变器20的方向为正向的方式连接有续流二极管54。
控制装置50在进行旋转电机10的动力运行或发电的动作时,从对电池40的电源电压Vbat进行检测的电压传感器51、对在旋转电机10的各相的绕组11中流动的电流进行检测的相电流传感器52、以及对旋转电机10的转速NE进行检测的转速传感器58等获取检测值。控制装置50基于所获取的检测值来控制第一逆变器20和第二逆变器30,以将旋转电机10的控制量控制为其指令值。控制量例如是转矩TE。
具体而言,控制装置50在第一逆变器20的控制中,为了隔着滞后时间使开关22、23交替地成为接通状态(闭状态),将与开关22、23分别对应的第一驱动信号SG1输出至开关22、23。第一驱动信号SG1为指示开关向接通状态切换的接通指令和指示向断开状态(开状态)切换的断开指令中的任意一个。
另外,控制装置50在第二逆变器30的控制中,为了隔着滞后时间使开关32、33交替地成为接通状态,将与开关32、33分别对应的第二驱动信号SG2输出至开关32、33。
并且,控制装置50基于所获取的检测值来获取旋转电机10的动作状态。旋转电机10的动作状态例如为高速旋转状态或低速旋转状态。然后,为了基于所获取的动作状态来对第一切换开关53进行切换操作,生成第一切换信号SC1,并且将所生成的第一切换信号SC1输出至第一切换开关53。控制装置50以与生成的第一切换信号SC1对应的方式生成第一驱动信号SG1及第二驱动信号SG2。
具体而言,当旋转电机10处于高速旋转状态时,将第一切换信号SC1设为接通指令。由此,第一切换开关53被切换为接通状态,第一逆变器20和第二逆变器30被H桥驱动。在H桥驱动中,通过PWM驱动来控制第一逆变器20和第二逆变器30,以使第一逆变器20和第二逆变器30的相同相的一方的上臂开关和另一方的下臂开关同步。以下,将对第一逆变器20和第二逆变器30进行H桥驱动的动作模式称为第二模式。PWM驱动是基于向旋转电机10输出的输出电压的目标值即目标电压与三角波信号等载波信号的大小比较,对各相的上臂开关和下臂开关的状态进行控制的驱动。另外,在本实施方式中,PWM驱动相当于“开关驱动”。
图2示出旋转电机10的动力运行时的第二模式的电流路径。在图2所示的示例中,进行控制以使第一逆变器20的U相的上臂开关与第二逆变器30的U相的下臂开关、第一逆变器20的V相的下臂开关与第二逆变器30的V相的上臂开关、第一逆变器20的W相的下臂开关与第二逆变器30的W相的上臂开关同步。此外,在图2中,省略了电压传感器51、相电流传感器52等的记载。对于图3、4也同样如此。
如图2所示,若第一逆变器20的上臂开关22A、下臂开关23B、23C、以及第二逆变器30的上臂开关32B、32C、下臂开关33A被设为接通状态,则电流以箭头IH1~IH3所示的路径流动。
另外,当旋转电机10处于低速旋转状态时,将第一切换信号SC1设为断开指令。由此,第一切换开关53被切换为断开状态,第一逆变器20和第二逆变器30被星形连接驱动。在星形连接驱动中,通过PWM驱动来控制第一逆变器20和第二逆变器30中的一方,并且对另一方进行中性点驱动。在此,中性点驱动是指将相应的逆变器的开关中的设有第一切换开关53一侧的上臂开关维持于接通状态、将未设有第一切换开关53的一侧的下臂开关维持于断开状态的驱动。通过中性点驱动,相应的逆变器被中性点化,并且旋转电机10被星形连接。以下,将对第一逆变器20和第二逆变器30进行星形连接驱动的动作模式称为第一模式。
图3示出旋转电机10的动力运行时的第一模式的电流路径。在图3所示的示例中,电池40一侧的第一逆变器20被PWM驱动,并且与电池40相反一侧的第二逆变器30被中性点驱动。
如图3所示,若第一逆变器20的上臂开关22A、下臂开关23B、23C和第二逆变器30的上臂开关32A、32B、32C被设为接通状态,则电流以箭头IY1~IY3所示的路径流动。
然而,IGBT等半导体开关的接通电阻比较大。因此,若将半导体开关元件用作第一切换开关53,则在第二模式下,设有第一切换开关53的高电位侧连接线LU的导通损耗增大,从而驱动系统70的电力损耗增大。
本实施方式的驱动系统70包括第二切换开关63。第二切换开关63是机械式的继电器开关,与第一切换开关53并联连接。控制装置50基于旋转电机10的动作状态来实施如下的切换控制处理:生成第一切换信号SC1,并将第一切换信号SC1输出至第一切换开关53,并且为了对第二切换开关63进行切换操作,生成第二切换信号SC2,并将生成的第二切换信号SC2输出至第二切换开关63。在切换控制处理中,控制装置50基于旋转电机10的动作状态在第一模式与第二模式之间进行切换,并且在第一模式与第二模式之间切换时,对第一切换开关53和第二切换开关63的接通状态和断开状态进行切换。由此,在驱动系统70中,能够较高地维持从第一模式向第二模式的切换中的响应性,并且抑制电力损耗。
图4是表示本实施方式的切换控制处理的流程图。在本实施方式中,示出了旋转电机10的动力运行时的切换控制处理的流程图。控制装置50在旋转电机10的动作中,每隔规定时间反复实施切换控制处理。
当开始切换控制处理时,首先,在步骤S10中,对动作模式是否是第一模式进行判断。根据旋转电机10的动作状态对动作模式进行判断。
若在步骤S10中作出肯定判断,则在步骤S12中,对旋转电机10的动作状态是否满足第一动作条件CN1进行判断。第一动作条件CN1是能使第一模式动作的条件,使用旋转电机10的转速NE和转矩TE来确定。具体而言,在转速NE比针对每个转矩TE确定的阈值速度Ntg小的情况下,满足第一动作条件CN1(参照图6)。此外,在本实施方式中,第一动作条件CN1相当于“规定的动作条件”。
若在步骤S12中作出肯定判断,则结束切换控制处理。另一方面,若在步骤S12中作出否定判断、即在不满足第一动作条件CN1的情况下,则从第一模式切换为第二模式,并且将第一切换开关53和第二切换开关63从断开状态切换为接通状态(S14~S24)。具体而言,在步骤S14中,将第一逆变器20切换为PWM驱动,在步骤S16中,将第二逆变器30切换为PWM驱动。
接着,在步骤S18中,将接通指令的第一切换信号SC1输出至第一切换开关53,将第一切换开关53设为接通状态。由此,第一逆变器20和第二逆变器30被切换为第二模式。另外,在本实施方式中,接通指令的第一切换信号SC1相当于“第一接通信号”。
在将接通指令的第一切换信号SC1输出至第一切换开关53之后,在步骤S20中,将接通指令的第二切换信号SC2输出至第二切换开关63,将第二切换开关63设为接通状态。接着,在步骤S22中,对从将第二切换开关63被切换为接通状态开始是否经过了第二切换开关63从断开状态转换为接通状态所需要的接通切换期间HN进行判断。另外,在本实施方式中,接通切换期间HN相当于“第一规定期间”,接通指令的第二切换信号SC2相当于“第二接通信号”。
若在步骤S22中作出否定判断,则重复步骤S22。另一方面,若在步骤S22中作出肯定判断,则在步骤S24中,将断开指令的第一切换信号SC1输出至第一切换开关53,将第一切换开关53切换为断开状态,并且结束切换控制处理。另外,在本实施方式中,断开指令的第一切换信号SC1相当于“第一断开信号”。
另一方面,若在步骤S10中作出否定判断,则在步骤S32中对旋转电机10的动作状态是否满足第一动作条件CN1进行判断。另外,在本实施方式中,步骤S12、S32的处理相当于“模式控制部”。
若在步骤S32中作出否定判断,则结束切换控制处理。另一方面,若在步骤S32中作出肯定判断、即在满足第一动作条件CN1的情况下,则从第二模式切换为第一模式,并且将第一切换开关53和第二切换开关63从接通状态切换为断开状态(S34~S44)。具体而言,在步骤S34中,将接通指令的第一切换信号SC1输出至第一切换开关53,将第一切换开关53设为接通状态。
接着,在步骤S36中,将断开指令的第二切换信号SC2输出至第二切换开关63,将第二切换开关63设为断开状态。接着,在步骤S38中,对从将第二切换开关63切换为断开状态开始是否经过了第二切换开关63从接通状态转移为断开状态所需要的断开切换期间HF进行判断。此外,在本实施方式中,断开切换期间HF相当于“第二规定期间”。
若在步骤S38中作出否定判断,则重复步骤S38。另一方面,若在步骤S38中作出肯定判断,则在步骤S40中,将断开指令的第一切换信号SC1输出至第一切换开关53,将第一切换开关53切换为断开状态。另外,在本实施方式中,步骤S18、S20、S36、S40的处理相当于“切换控制部”。
在步骤S42中,将第一逆变器20切换为PWM驱动,在步骤S44中,将第二逆变器30切换为中性点驱动,结束切换控制处理。由此,第一逆变器20和第二逆变器30被切换为第一模式。另外,在本实施方式中,断开指令的第二切换信号SC2相当于“第二断开信号”。
接着,图5示出了在切换控制处理中第一切换开关53和第二切换开关63的状态的推移。在此,图5的(a)示出了旋转电机10中的第一动作条件CN1的满足状态的推移,图5的(b)示出了第一切换开关53的状态的推移,具体而言,示出了施加于第一切换开关53的栅极端子的栅极电压的推移。图5的(c)示出了第二切换开关63的状态的推移,并且图5的(c)示出了第一逆变器20和第二逆变器30的动作模式的推移。
如图5所示,若旋转电机10在时刻t11处不再满足第一动作条件CN1,则将接通指令的第一切换信号SC1输出至第一切换开关53,以将第一逆变器20和第二逆变器30的动作模式从第一模式切换为第二模式。在随后的时刻t12处,将接通指令的第二切换信号SC2输出至第二切换开关63。由此,在从时刻t12经过了接通切换期间HN后的时刻t13处,第二切换开关63被切换为接通状态。
在本实施方式中,由于与接通指令的第二切换信号SC2相比,先输出接通指令的第一切换信号SC1,因此,第一切换开关53比第二切换开关63先切换为接通状态。如上所述,构成第一逆变器20的开关22、23、构成第二逆变器30的开关22、23以及第一切换开关53都是半导体开关,切换所需的时间基本上相同。因此,在将第一切换开关53切换为接通状态之后,通过对第一切换开关53的栅极端子施加阈值电压Vth以上的电压,第一逆变器20和第二逆变器30与第一切换开关53被切换为接通状态基本上同时地从第一模式切换为第二模式。其结果是,当旋转电机10不再满足第一动作条件CN1时,能够迅速地将第一逆变器20和第二逆变器30从第一模式切换为第二模式。
在随后的时刻t14处、即从在时刻t12输出接通指令的第二切换信号SC2开始经过了接通切换期间HN之后,将断开指令的第一切换信号SC1输出至第一切换开关53。由此,第一切换开关53被切换为断开状态,并且在第二模式下,缩短了电流流过第一切换开关53的期间,从而抑制了第一切换开关53的劣化。
若旋转电机10在时刻t15处满足第一动作条件CN1,则将接通指令的第一切换信号SC1输出至第一切换开关53,以将第一逆变器20和第二逆变器30的动作模式从第二模式切换为第一模式。因此,第一切换开关53和第二切换开关63都被切换为接通状态。
在随后的时刻t16处,将断开指令的第二切换信号SC2输出至第二切换开关63。由此,在从时刻t16开始经过了断开切换期间HF后的时刻t17处,第二切换开关63被切换为断开状态。
在随后的时刻t18处、即从在时刻t16输出断开指令的第二切换信号SC2开始经过了断开切换期间HF之后,将断开指令的第一切换信号SC1输出至第一切换开关53。
在本实施方式中,在从输出断开指令的第二切换信号SC2开始经过了断开切换期间HF之后,输出断开指令的第一切换信号SC1,由此,在第二切换开关63之后将第一切换开关53切换为断开状态。因此,在将第一切换开关53切换为断开状态之后,施加于第一切换开关53的栅极端子的电压变得低于阈值电压Vth,由此第一逆变器20及第二逆变器30与第一切换开关53被切换为断开状态基本上同时地从第二模式切换为第一模式。
另一方面,在本实施方式中,从旋转电机10满足第一动作条件CN1开始到第一逆变器20和第二逆变器30被切换为第一模式为止,需要从时刻t15到时刻t18的延迟期间HD。因此,不能将第一逆变器20和第二逆变器30迅速地从第二模式切换为第一模式。因此,若第一逆变器20和第二逆变器30在该延迟期间HD不能继续第二模式,则旋转电机10的动作状态变得不稳定。
在本实施方式中,在第一动作条件CN1下,能够以第二模式动作,因此,抑制了旋转电机10的动作状态变得不稳定。以下,对在第一动作条件CN1下能够以第二模式动作的理由进行说明。
图6示出了第一动作条件CN1与第二动作条件CN2的关系。在此,第二动作条件CN2是能够以第二模式动作的条件。图6中示出了满足第一动作条件CN1的范围(实线)和满足第二动作条件CN2的范围(虚线)。如图6所示,在本实施方式中,满足第二动作条件CN2的范围包括满足第一动作条件CN1的范围。因此,在第一动作条件CN1下,能够以第二模式动作。
例如,对如箭头YA所示由于旋转电机10的转速NE的降低而使转速NE降低至阈值速度Ntg以下的情况进行研究。在这种情况下,由于满足第一动作条件CN1,因此,从第二模式切换为第一模式。在本实施方式中,在第一动作条件CN1下,能够以第二模式动作,因此,即使满足了第一动作条件CN1,也不需要立即切换为第一模式。因此,即使在从第二模式切换为第一模式时产生延迟期间HD的情况下,也能够对旋转电机10的动作状态变得不稳定进行抑制。
与之相反地,对如箭头YB所示由于旋转电机10中的转速NE的上升而使转速NE上升至阈值速度Ntg以上的情况进行研究。在这种情况下,由于不再满足第一动作条件CN1,因此,不能继续第一模式,需要迅速地从第一模式切换为第二模式。在本实施方式中,在从第一模式切换为第二模式时,第一切换开关53比第二切换开关63先切换为接通状态,因此,能够迅速地从第一模式切换为第二模式。
根据以上详细描述的本实施方式,能够得到以下的效果。
·在本实施方式的驱动系统70中,第一逆变器20和第二逆变器30的动作模式能在第一模式与第二模式之间切换,在第一模式与第二模式之间切换时,与高电位侧连接线LU并联连接的第一切换开关53和第二切换开关63在接通状态与断开状态之间进行切换。第一切换开关53是半导体开关,与继电器开关相比,切换的响应性优异。另外,第二切换开关63是继电器开关,与半导体开关相比接通电阻较小,并且能够对设置有这些开关的高电位侧连接线LU的导通损耗进行抑制。其结果是,在驱动系统70中,能够较高地维持第一模式与第二模式的切换时的响应性,并且抑制电力损耗。
·在继电器开关中,切换需要花费时间,并且切换所需的时间的偏差较大。因此,难以使将由半导体开关构成的第一逆变器20及第二逆变器30从第一模式切换为第二模式的时刻与将作为继电器开关的第二切换开关63从断开状态切换为接通状态的时刻一致。在本实施方式的驱动系统70中,在从第一模式切换为第二模式时,第一切换开关53和第二切换开关63从断开状态切换为接通状态,并且在该切换时,接通指令的第一切换信号SC1比接通指令的第二切换信号SC2先输出,作为半导体开关的第一切换开关53先切换为接通状态。其结果是,能够使将第一逆变器20和第二逆变器30从第一模式切换为第二模式的时刻与将作为半导体开关的第一切换开关53从断开状态切换为接通状态的时刻适当地一致。
·同样地,难以使将第一逆变器20和第二逆变器30从第二模式切换为第一模式的时刻与将第二切换开关63从接通状态切换为断开状态的时刻一致。在本实施方式的驱动系统70中,在从第二模式向第一模式切换时,将第一切换开关53和第二切换开关63从接通状态切换为断开状态,在该切换时,在输出断开指令的第二切换信号SC2开始经过了断开切换期间HF之后,输出断开指令的第一切换信号SC1,并且作为半导体开关的第一切换开关53被延迟切换为断开状态。其结果是,能够使将第一逆变器20和第二逆变器30从第二模式切换为第一模式的时刻与将第一切换开关53从接通状态切换为断开状态的时刻适当地一致。
·另外,在继电器开关中,有时会发生在从接通状态切换为断开状态之后短时间内重复接通状态与断开状态的现象(以下,称为回跳)。因此,在第一切换开关53和第二切换开关63从接通状态向断开状态切换时,若第二切换开关63被延迟切换为断开状态,则在通过回跳切换为第一模式之后,作为继电器开关的第二切换开关63变为接通状态,旋转电机10的动作状态变得不稳定。在本实施方式的驱动系统70中,作为半导体开关的第一切换开关53被延迟切换为断开状态。作为半导体开关的第一切换开关53与继电器开关相比难以发生回跳,因此,抑制了旋转电机10的动作状态变得不稳定。
·在本实施方式的驱动系统70中,在从第一模式向第二模式切换时,在输出接通指令的第二切换信号SC2开始经过了接通切换期间HN之后,输出断开指令的第一切换信号SC1,将第一切换开关53切换为断开状态。由此,在第二模式下,能够缩短电流流过第一切换开关53的期间,并且能够抑制第一切换开关53的劣化。
·在本实施方式的驱动系统70中,在满足第一动作条件CN1的情况下,从第二模式切换为第一模式,在不满足第一动作条件CN1的情况下,从第一模式切换为第二模式。因此,在不满足第一动作条件CN1的情况下,需要迅速地从第一模式切换为第二模式。在本公开的驱动系统70中,第一切换开关53是半导体开关,并且在从第一模式向第二模式切换时,第一切换开关53比第二切换开关63先切换为接通状态。由此,能够迅速地从第一模式切换为第二模式。
·另一方面,由于第二切换开关63是继电器开关,因此,在从第二模式向第一模式的切换中会产生延迟期间HD。在本实施方式的驱动系统70中,能够在第一动作条件CN1下以第二模式动作。因此,即使满足了第一动作条件CN1,也不需要立即切换为第一模式。因此,即使在从第二模式切换为第一模式时产生延迟期间HD的情况下,也能够对旋转电机10的动作状态变得不稳定进行抑制。
·在本实施方式的驱动系统70中,在高电位侧连接线LU上并联连接有第一切换开关53和第二切换开关63。因此,即使在这些开关中的一方发生开路故障的情况下,也能够使用另一方的开关来对第一模式和第二模式进行切换,从而能够适当地控制旋转电机10的动作状态。
<第二实施方式>
以下,参照附图,以与第一实施方式的不同点为中心,对第二实施方式进行说明。在本实施方式中,在驱动系统70包括第二电源线LE2这一点上不同。第二电源线LE2通过与电源线LE和高电位侧连接线LU不同的路径,将电池40的高电位侧与第二逆变器30的高电位侧连接。在本实施方式中,电源线LE被称为第一电源线LE1。在图7中,为了方便,对于与先前的图1所示的内容相同的内容,标注相同的符号并省略说明。
在本实施方式中,在驱动系统70包括第三切换开关55、第四切换开关56、第五切换开关65、第六切换开关66这一点上不同。第三切换开关55设置于第一电源线LE1,第四切换开关56设置于第二电源线LE2。在本实施方式中,作为各开关55、56,使用电压控制型的半导体开关元件,更具体而言,使用IGBT。在各开关55、56,以电流从对应的逆变器流向电池40的方向为正向的方式连接有续流二极管57。另外,在本实施方式中,第一电源线LE1和接地线LG相当于“第一连接线”,第二电源线LE2、接地线LG和低电位侧连接线LD相当于“第二连接线”。
第五切换开关65是机械式的继电器开关,与第三切换开关55并联连接。第六切换开关66是机械式的继电器开关,与第四切换开关56并联连接。控制装置50基于实施第二模式的期间、即实施星形连接驱动的期间,生成与第三切换开关~第六切换开关55、56、65、66对应的第三切换开关SC3~第六切换信号SC6,并且输出至对应的切换开关55、56、65、66。
控制装置50在第一模式的动作中,基于规定条件,在第一逆变器20和第二逆变器30中对实施PWM驱动的逆变器和实施中性点驱动的逆变器进行切换。具体而言,控制装置50将第三切换开关55、第五切换开关65和第四切换开关56、第六切换开关66中的一方的开关组切换为接通状态,并且将另一方的开关组切换为断开状态。具体而言,为了隔着滞后时间使各开关组交替地成为接通状态,将与切换开关55、56、65、66分别对应的第三切换信号SC3~第六切换信号SC6输出至各切换开关55、56、65、66。
图3所示的示例表示第三切换开关55、第五切换开关65被设为接通状态,第四切换开关56、第六切换开关66被设为断开状态的状态。在这种情况下,对控制为接通状态的第三切换开关55、第五切换开关65侧的第一逆变器20实施PWM驱动,并且对控制为断开状态的第四切换开关56、第六切换开关66侧的第二逆变器30实施中性点驱动。以下,将对第一逆变器20实施PWM驱动、对第二逆变器30实施中性点驱动的星形连接驱动称为第一星形连接驱动。另外,在本实施方式中,第一星形连接驱动相当于“第一驱动”。
图8示出了旋转电机10的动力运行时的第一模式的电流路径。在图4所示的示例中,第三切换开关55、第五切换开关65被设为断开状态,第四切换开关56、第六切换开关66被设为接通状态。在这种情况下,对控制为接通状态的第四切换开关56、第六切换开关66侧的第二逆变器30实施PWM驱动,并且对控制为断开状态的第三切换开关55、第五切换开关65侧的第一逆变器20实施中性点驱动。以下,将对第一逆变器20实施中性点驱动、对第二逆变器30实施PWM驱动的星形连接驱动称为第二星形连接驱动。因此,星形连接驱动包括第一星形连接驱动和第二星形连接驱动。另外,在本实施方式中,第二星形连接驱动相当于“第二驱动”。
如图8所示,在第二星形连接驱动中,若第一逆变器20的上臂开关32A、22B、22C以及第二逆变器30的上臂开关32A、下臂开关33B、33C被设为接通状态,则电流以箭头IY4~IY6所示的路径流动。
图9示出了本实施方式的切换控制处理。另外,在图9中,为了方便,对于与之前的图4所示的处理相同的处理,标注相同的步骤编号并省略说明。
在本实施方式的切换控制处理中,若在步骤S12中作为否定判断、即在从第一模式切换为第二模式时,在步骤S52中,将接通指令的第三切换信号SC3、第五切换信号SC5输出至第三切换开关55、第五切换开关65,将第三切换开关55、第五切换开关65从断开状态切换为接通状态。在将第三切换开关55、第五切换开关65切换为接通状态的情况下,与将第一切换开关53及第二切换开关63切换为接通状态的情况同样地,第三切换开关55也可以比第五切换开关65先切换为接通状态。另外,将第四切换开关56、第六切换开关66从断开状态切换为接通状态的情况也相同。
接着,在步骤S54中,将断开指令的第四切换信号SC4、第六切换信号SC6输出至第四切换开关56、第六切换开关66,将第四切换开关56、第六切换开关66从接通状态切换为断开状态。在将第四切换开关56、第六切换开关66切换为断开状态的情况下,与将第一切换开关53和第二切换开关63切换为断开状态的情况同样地,第四切换开关56也可以与第六切换开关66相比延迟切换为断开状态。另外,将第三切换开关55、第五切换开关65从接通状态切换为断开状态的情况也相同。
另一方面,若在步骤S12中作出肯定判断或者实施步骤S36的处理、即在维持第一模式或者从第二模式切换为第一模式时,在步骤S62中,对是否实施第一星形连接驱动进行判断。控制装置50在从第二模式切换为第一模式时,实施第一星形连接驱动。另外,控制装置50在先前的切换控制处理中的星形连接驱动是第一星形连接驱动的情况下,实施第一星形连接驱动。在此,先前的切换控制处理是指实施了星形连接驱动的最近的切换控制处理,例如在前一次的切换控制处理中实施了第一星形连接驱动和第二星形连接驱动中的一方的情况下,意味着前一次的切换控制处理。
若在步骤S62中作出肯定判断,则在步骤S64中,获取持续实施第一星形连接驱动的期间即第一驱动期间YH1。控制装置50对从第一星形连接驱动和第二星形连接驱动的切换开始经过的期间进行测量,获取从第二星形连接驱动向第一星形连接驱动的切换开始经过的期间作为第一驱动期间YH1。
在步骤S66中,对在步骤S64中获取的第一驱动期间YH1是否经过了规定的基准期间YK进行判断。规定的基准期间YK是能够对由于持续实施第一星形连接驱动或第二星形连接驱动而被PWM驱动的逆变器的开关的温度过度上升进行抑制的期间。
若在步骤S66中作出否定判断,则为了维持第一星形连接驱动,在步骤S68中,将接通指令的第三切换信号SC3、第五切换信号SC5输出至第三切换开关55、第五切换开关65,将第三切换开关55、第五切换开关65设为接通状态。接着,在步骤S70中,将断开指令的第四切换信号SC4、第六切换信号SC6输出至第四切换开关56、第六切换开关66,将第四切换开关56、第六切换开关66设为断开状态。
在步骤S72中,对切换为接通状态的第三切换信号SC3、第五切换信号SC5侧的第一逆变器20实施PWM驱动,并且在随后的步骤S74中,对控制为断开状态的第四切换开关56、第六切换开关66侧的第二逆变器30实施中性点驱动,并且前进至步骤S42。
另一方面,若在步骤S66中作出肯定判断,则为了从第一星形连接驱动切换为第二星形连接驱动,在步骤S88中,将断开指令的第三切换信号SC3、第五切换信号SC5输出至第三切换开关55、第五切换开关65,将第三切换开关55、第五切换开关65设为断开状态。接着,在步骤S70中,将接通指令的第四切换信号SC4、第六切换信号SC6输出至第四切换开关56、第六切换开关66,将第四切换开关56、第六切换开关66设为接通状态。
在步骤S92中,对切换为断开状态的第三切换信号SC3、第五切换信号SC5侧的第一逆变器20实施中性点驱动,并且在随后的步骤S94中,对控制为接通状态的第四切换开关56、第六切换开关66侧的第二逆变器30实施PWM驱动,并且前进至步骤S42。
另外,另一方面,若在步骤S62中作出肯定判断,则在步骤S84中,获取持续实施第二星形连接驱动的期间即第二驱动期间YH2。接着,在步骤S86中,对在步骤S84中获取的第二驱动期间YH2是否经过了基准期间YK进行判断。
若在步骤S86中作出否定判断,则为了维持第二星形连接驱动,前进至步骤S88。另一方面,若在步骤S86中作出肯定判断,则为了从第二星形连接驱动切换为第一星形连接驱动,前进至步骤S68。此外,在本实施方式中,步骤S66、S86的处理相当于“驱动切换部”,步骤S66、S86的处理相当于“驱动切换部”,步骤S18、S20、S36、S44、S52、S54、S68、S70、S88、S90的处理相当于“切换控制部”。
·根据以上说明的本实施方式,在第一电源线LE1上并联连接有第三切换开关55和第五切换开关65,在从第一星形连接驱动向第二星形连接驱动切换时,将这些开关从断开状态切换为接通状态。另外,在从第二星形连接驱动向第一星形连接驱动切换时,将这些开关从接通状态切换为断开状态。第三切换开关55是半导体开关,与继电器开关相比,切换的响应性优异。另外,第五切换开关65是继电器开关,与半导体开关相比接通电阻较小,能够抑制设置有这些开关的第一电源线LE1的导通损耗。其结果是,在驱动系统70中,能够较高地维持第一星形连接驱动和第二星形连接驱动的切换时的响应性,并且抑制电力损耗。
·另外,根据本实施方式,在第二电源线LE2上并联连接有第四切换开关56和第六切换开关66,在从第二星形连接驱动向第一星形连接驱动切换时,将这些开关从接通状态切换为断开状态。另外,在从第一星形连接驱动向第二星形连接驱动切换时,将这些开关从断开状态切换为接通状态。第四切换开关56是半导体开关,与继电器开关相比,切换的响应性优异。另外,第六切换开关65是继电器开关,与半导体开关相比接通电阻较小,能够抑制设置有这些开关的第二电源线LE2的导通损耗。其结果是,在驱动系统70中,能够较高地维持第一星形连接驱动和第二星形连接驱动的切换时的响应性,并且抑制电力损耗。
<第三实施方式>
以下,参照附图,以与第二实施方式的不同点为中心,对第三实施方式进行说明。在本实施方式中,在驱动系统70包括第二接地线LG2来代替第二电源线LE2这一点上不同。第二接地线LG2通过与接地线LG和低电位侧连接线LD不同的路径,将电池40的低电位侧与第二逆变器30的低电位侧连接。在本实施方式中,第一电源线LE1被称为电源线LE,并且接地线LG被称为第一接地线LG1。在图10中,为了方便,对于与先前的图1和图7中所示的内容相同的内容,标注相同的符号并省略说明。
在本实施方式中,在包括第一低压侧切换开关至第六低压侧切换开关53D、55D、56D、63D、65D、66D来代替第一切换开关至第六切换开关53、55、56、63、65、66这一点上不同。第一低压侧切换开关53D设置于低电位侧连接线LD。在本实施方式中,作为第一低压侧切换开关53D,使用电压控制型的半导体开关元件,更具体而言,使用IGBT。在第一低压侧切换开关53D,以电流从第一逆变器20流向第二逆变器30的方向为正向的方式连接有续流二极管54D。第二低压侧切换开关63D与第一低压侧切换开关53D并联连接。第一低压侧切换开关53D、第二低压侧切换开关63D通过第一切换信号SC1、第二切换信号SC2进行切换操作。
第三低压侧切换开关55D设置于第一接地线LG1,第四低压侧切换开关56D设置于第二接地线LG2。在本实施方式中,作为各开关55D、56D,使用电压控制型的半导体开关元件,更具体而言,使用IGBT。在各开关55D、56D,以电流从电池40流向对应的逆变器的方向为正向的方式连接有续流二极管57D。第五低压侧切换开关65D与第三低压侧切换开关55D并联连接。第六低压侧切换开关66D与第四低压侧切换开关56D并联连接。第三低压侧切换开关至第六低压侧切换开关55D、56D、65D、66D通过第三切换信号SC3至第六切换信号SC6进行切换操作。
·根据以上说明的本实施方式,在低电位侧连接线LD上并联连接有第一低压侧切换开关53D和第二低压侧切换开关63D,当在第一模式与第二模式之间进行切换时,对这些开关的接通状态与断开状态进行切换。因此,在驱动系统70中,能够较高地维持第一模式与第二模式的切换时的响应性,并且抑制电力损耗。
·另外,根据本实施方式,在第一接地线LG1上并联连接有第三低压侧切换开关55D和第五低压侧切换开关65D,当在第一星形连接驱动与第二星形连接驱动之间进行切换时,对上述开关的接通状态与断开状态进行切换。因此,在驱动系统70中,能够较高地维持第一星形连接驱动和第二星形连接驱动的切换时的响应性,并且抑制电力损耗。
·此外,根据本实施方式,在第二接地线LG2上并联连接有第四低压侧切换开关56D和第六低压侧切换开关66D,当在第一星形连接驱动与第二星形连接驱动之间进行切换时,对这些开关的接通状态与断开状态进行切换。因此,在驱动系统70中,能够较高地维持第一星形连接驱动和第二星形连接驱动的切换时的响应性,并且抑制电力损耗。
·特别地,在本实施方式的驱动系统70中,第一低压侧切换开关至第六低压侧切换开关53D、55D、56D、63D、65D、66D设置于电池40的低电位侧。因此,与设置于电池40的高电位侧的情况相比,施加于这些开关的电位较低,因此,能够对上述开关的劣化进行抑制。
<第四实施方式>
以下,参照附图,以与第二实施方式以及第三实施方式的不同点为中心,对第四实施方式进行说明。在本实施方式中,在驱动系统70除了第二电源线LE2之外还包括第二接地线LG2这一点上不同。在图11中,为了方便,对于与先前的图7和图10中所示的内容相同的内容,标注相同的符号并省略说明。
在本实施方式中,在驱动系统70除了第一切换开关至第六切换开关53、55、56、63、65、66之外,还设置有第一低压侧切换开关至第六低压侧切换开关53D、55D、56D、63D、65D、66D这一点上不同。在本实施方式中,将第一切换开关至第六切换开关53、55、56、63、65、66称为第一高压侧切换开关至第六高压侧切换开关53U、55U、56U、63U、65U、66U。
·根据以上说明的本实施方式,在高电位侧连接线LU上并联连接有第一高压侧切换开关53U和第二高压侧切换开关63U,在低电位侧连接线LD上并联连接有第一低压侧切换开关53D和第二低压侧切换开关63D。并且,当在第一模式与第二模式之间进行切换时,对这些开关的接通状态与断开状态进行切换。因此,在驱动系统70中,能够较高地维持第一模式与第二模式的切换时的响应性,并且抑制电力损耗。
·另外,根据本实施方式,在第一电源线LE1上并联连接有第三高压侧切换开关55U和第五高压侧切换开关65U,在第一接地线LG1上并联连接有第三低压侧切换开关55D和第五低压侧切换开关65D。并且,当在第一星形连接驱动与第二星形连接驱动之间进行切换时,对这些开关的接通状态与断开状态进行切换。因此,在驱动系统70中,能够较高地维持第一星形连接驱动和第二星形连接驱动的切换时的响应性,并且抑制电力损耗。
·此外,根据本实施方式,在第二电源线LE2上并联连接有第四高压侧切换开关56U和第六高压侧切换开关66U,在第二接地线LG2上并联连接有第四低压侧切换开关56D和第六低压侧切换开关66D。并且,当在第一星形连接驱动与第二星形连接驱动之间进行切换时,对这些开关的接通状态与断开状态进行切换。因此,在驱动系统70中,能够较高地维持第一星形连接驱动和第二星形连接驱动的切换时的响应性,并且抑制电力损耗。
·特别地,在本实施方式的驱动系统70中,在高电位侧连接线LU上设置有第一高压侧切换开关53U、第二高压侧切换开关63U,在低电位侧连接线LD上设置有第一低压侧切换开关53D、第二低压侧切换开关63D。并且,在第一模式下,第一高压侧切换开关53U、第二高压侧切换开关63U和第一低压侧切换开关53D、第二低压侧切换开关63D维持于断开状态。因此,在第一模式下实施中性点驱动的逆变器中,能够将上臂开关和下臂开关这两者维持于断开状态,并且能够使在相应的逆变器内流动的电流分散于上臂开关侧和下臂开关侧。由此,与仅上臂开关和下臂开关中的一方能够处于断开状态的情况相比,能够对实施中性点驱动的逆变器中的电力损耗进行抑制。
<其他实施方式>
另外,上述各实施方式也可进行以下变更来实施。
·在上述各实施方式中,说明了旋转电机10的动力运行时的切换控制处理,但是切换控制处理也可以在旋转电机10的发电时实施。在旋转电机10发电时,也可以根据旋转电机10的动作状态对第一模式和第二模式进行切换,并且可以在第一切换开关53和第二切换开关63的接通状态与断开状态之间切换。
·在上述实施方式中,示出了当将第一切换开关53和第二切换开关63从断开状态切换为接通状态时,将接通指令的第一切换信号SC1输出至第一切换开关53,并且在第一切换开关53切换为接通状态之后,将接通指令的第二切换信号SC2输出至第二切换开关63的示例,但是不限于此。也可以是,将接通指令的第一切换信号SC1输出至第一切换开关53,并且在第一切换开关53切换为接通状态之前将接通指令的第二切换信号SC2输出至第二切换开关63。在这种情况下,也能够根据作为半导体开关的第一切换开关53和作为继电器开关的第二切换开关63的响应性的不同,使第一切换开关53比第二切换开关63先切换为接通状态。
·在上述各实施方式中,示出了在第二模式的动作中,在第二切换开关63切换为接通状态之后将第一切换开关53切换为断开状态的示例,但是第一切换开关53不需要一定切换到断开状态。
·在上述各实施方式中,作为开关驱动例示了PWM驱动,但是不限于此。例如,可以实施矩形驱动。矩形驱动是以在电角度的一个周期内,隔着滞后时间,使上臂开关和下臂开关成为分别各接通一次的状态,并且使各相的上臂开关和下臂开关的开关模式各错开120°的方式进行控制的驱动。另外,也可以实施过调制驱动。过调制驱动是以向旋转电机10输出的输出电压的最大值成为电池40的电源电压Vbat的2/π倍的方式在多个载波周期内持续使各相的上臂开关和下臂开关接通的控制的驱动。
·作为第一逆变器20和第二逆变器30所包括的开关,不限于IGBT,例如也可以是MOSFET。在这种情况下,作为反向连接到开关的二极管,能够使用MOSFET的体二极管,不必在MOSFET之外使用续流二极管。
·作为旋转电机10,不限于三相旋转电机,也可以是两相或四相以上的旋转电机。作为第一逆变器20和第二逆变器30,只要是包括与旋转电机10所具有的相数对应的上臂开关和下臂开关的串联连接体的逆变器即可。例如,在两相的情况下,相互串联连接的第一组的上臂开关和下臂开关的连接点和相互串联连接的第二组的上臂开关和下臂开关的连接点经由感应负载(例如绕组)连接。
虽然基于实施例对本公开进行了记述,但是应当理解为本公开并不限定于上述实施例、结构。本公开也包含各种各样的变形例、等同范围内的变形。除此之外,各种各样的组合、方式、进一步包含有仅一个要素、一个以上或一个以下的其他组合、方式也属于本公开的范畴、思想范围。
- 驱动系统、运行驱动系统的方法以及具有驱动系统的车辆
- 混合动力驱动系统的传动机构、混合动力驱动系统及运行混合动力驱动系统的方法