平地机远程遥控控制方法及系统
文献发布时间:2023-06-19 11:29:13
技术领域
本发明涉及一种平地机远程遥控控制方法及系统,属于平地机控制领域。
背景技术
由于矿山的恶劣环境,客户对矿用平地机的要求越来越高。目前,平地机的远程遥控领域尚处于空白阶段,机手必须现场对平地机进行操作,矿山地质情况复杂,石渣琐碎难缠,尘土多,长时间处于这样的环境对机手的身体造成伤害,还存在一定的安全隐患。
发明内容
针对上述现有技术存在的问题,本发明提供一种平地机远程遥控控制方法,对平地机实现低时延、高清晰的超远距离控制,安全性高。
本发明还提供了一种平地机远程遥控控制系统。
为了实现上述目的,本发明采用的一种平地机远程遥控控制方法,包括以下步骤:
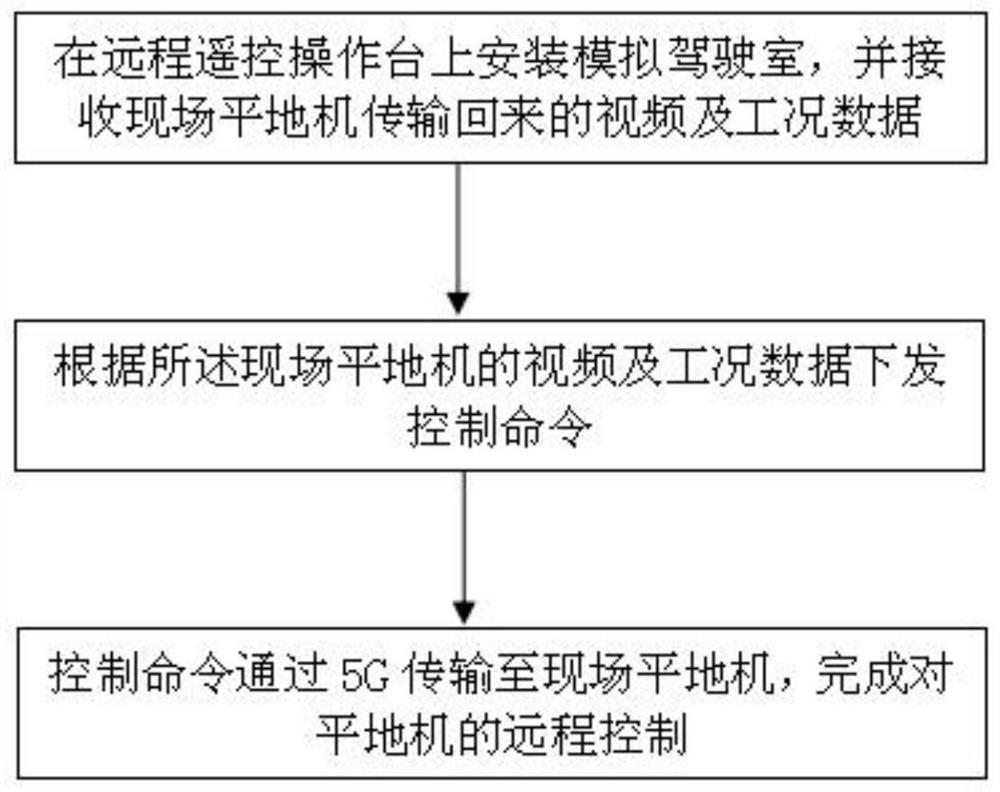
S1、在远程遥控操作台上安装模拟驾驶室,并接收现场平地机传输回来的视频及工况数据;
S2、根据现场平地机的视频及工况数据下发控制命令;
S3、控制命令通过5G传输至现场平地机,完成对平地机的远程控制。
作为改进,所述模拟驾驶室包括座椅、扶手箱、油门踏板、刹车踏板和显示屏;所述扶手箱包括手柄、机具锁定开关、启动按钮、熄火按钮、急停按钮和驻车按钮。
作为改进,所述显示屏用于显示平地机现场传输回来的视频和工况数据。
作为改进,所述工况数据包括发动机转速、车速和档位。
作为改进,所述现场平地机上安装了六路高清摄像头、一路全景摄像头和一路驾驶室摄像头。
作为改进,所述控制命令包括行走命令、转向命令和铲刀动作命令。
作为改进,所述现场平地机上安装有雷达,雷达用于探测现场障碍物,当雷达探测到障碍物时,现场平地机自主刹车。
作为改进,当5G信号中断时,现场平地机进行自动刹车,并停止液压动作。
作为改进,所述远程遥控操作台远程遥控至少两台现场平地机。
另外,本发明还提供了一种平地机远程遥控控制系统,包括:
接收单元:在远程遥控操作台上安装模拟驾驶室,并接收现场平地机传输回来的视频及工况数据;
控制单元:根据所述现场平地机的视频及工况数据下发控制命令;
发送单元:控制命令通过5G传输至现场平地机,完成对平地机的远程控制。
与现有技术相比,本发明可以使操作机手在舒适环境下完成对平地机的远程遥控,实现低时延、高清晰的超远距离控制平地机,具有更高的安全性。
附图说明
图1为本发明的平地机远程遥控控制方法流程图;
图2为本发明的平地机远程遥控控制方法视频传输原理图;
图3为本发明的平地机远程遥控控制方法数据传输原理图;
图4为本发明的显示屏显示界面分布图;
图5为本发明的平地机远程遥控控制系统框图。
具体实施方式
为使本发明的目的、技术方案和优点更加清楚明了,下面对本发明进行进一步详细说明。但是应该理解,此处所描述的具体实施例仅仅用以解释本发明,并不用于限制本发明的范围。
除非另有定义,本文所使用的所有的技术术语和科学术语与属于本发明的技术领域的技术人员通常理解的含义相同,本文中在本发明的说明书中所使用的术语只是为了描述具体的实施例的目的,不是旨在于限制本发明。
如图1所示,一种平地机远程遥控控制方法,包括以下步骤:
S1、在远程遥控操作台上安装模拟驾驶室,并接收现场平地机传输回来的视频及工况数据;
具体地,如图2所示,现场平地机通过外置摄像头实时采集设备作业现场的视频,并通过视频主机进行编码,然后通过5G路由器传输至远程遥控操作台,经由交换机、工控机最终显示在显示屏上;
S2、根据现场平地机的视频及工况数据下发控制命令;
具体地,操作机手根据现场平地机传过来的视频和工况数据了解现场环境以及实时工况,通过模拟驾驶室对现场平地机进行操控,发出控制命令;
S3、控制命令通过5G传输至现场平地机,完成对平地机的远程控制。
具体地,如图3所示,模拟驾驶室发出的控制命令传输至本地控制器,控制器对控制命令进行处理,通过CAN通讯传输到网关将CAN数据转成以太网数据,以太网数据通过交换机传输至5G路由器,最终通过5G传输至现场平地机的控制器,实现对平地机的远程控制。
另外,现场平地机的工况数据也是通过上述线路由现场平地机的控制器传输至远程遥控操作台的工控机,并在显示屏上显示。
作为实施例的改进,所述模拟驾驶室包括但不限于座椅、扶手箱、油门踏板、刹车踏板、显示屏,其中,扶手箱上包括手柄、机具锁定开关、启动按钮、熄火按钮、急停按钮、驻车按钮等,所述显示屏用于显示平地机现场传输回来的视频和工况数据。
图4所示为显示屏的显示界面分布图,现场平地机上安装了六路高清摄像头、一路全景摄像头,还有一路驾驶室摄像头,显示屏界面将左前方、正前方、右前方,铲刀左侧、铲刀右侧、正后方,全景视角的视频进行拼接,从而可以全方位了解现场环境,显示屏下方还展示了现场工况数据,另外,右下角显示了驾驶室内部的情况,显示屏左下角是平地机的GPS定位信息。
其中,工况数据包括发动机转速、车速、档位等。
作为实施例的改进,控制命令包括但不限于:行走命令、转向命令、铲刀动作命令。也就是说,在平地机能够实现的动作,在远程遥控操作台上都可以进行操作。
作为实施例的改进,现场平地机上安装了五组雷达,用于探测现场障碍物。当雷达探测到障碍物时现场平地机即会自主刹车。具体的,在检测到障碍物时,雷达将障碍物信息传达给现场平地机控制器,控制器对障碍物的大小以及离障碍物的距离进行判断,在距离障碍物一定距离时即提前自主刹车,提高了远程遥控的安全性能。
另外,当5G信号中断时,现场平地机也会进行自动刹车,并停止液压动作,防止通信中断而造成事故。
作为实施例的改进,远程遥控操作台可以远程遥控至少两台现场平地机,通过远程遥控操作台上的切换开关,即可实现切换多台现场平地机。
本发明的平地机远程遥控控制方法,使操作机手在舒适的环境下完成对平地机的远程遥控,实现低时延、高清晰的超远距离遥控平地机,具有更高的安全性。
最后,本发明提供了一种平地机远程遥控控制系统,如图5所示,包括:
接收单元:在远程遥控操作台上安装模拟驾驶室,并接收现场平地机传输回来的视频及工况数据;
控制单元:根据所述现场平地机的视频及工况数据下发控制命令;
发送单元:控制命令通过5G传输至现场平地机,完成对平地机的远程控制。
以上所述仅为本发明的较佳实施例而已,并不用以限制本发明,凡在本发明的精神和原则之内所作的任何修改、等同替换或改进等,均应包含在本发明的保护范围之内。
- 平地机远程遥控控制方法及系统
- 平地机停车制动控制方法、平地机停车制动系统和平地机