一种用于森林灭火的智能机器人
文献发布时间:2023-06-19 11:30:53
技术领域
本发明属于灭火机器人技术领域,特别是涉及一种用于森林灭火的智能机器人。
背景技术
森林火灾,是指失去人为控制,在林地内自由蔓延和扩展,对森林、森林生态系统和人类带来一定危害和损失的林火行为。森林火灾是一种突发性强、破坏性大、处置救助较为困难的自然灾害。是火灾的一种,森林一旦遭受火灾,最直观的危害是烧死或烧伤林木。一方面使森林蓄积下降,另一方面也使森林生长受到严重影响。森林是生长周期较长的再生资源,遭受火灾后,其恢复需要很长的时间。特别是高强度大面积森林火灾之后,森林很难恢复原貌,常常被低价林或灌丛取而代之。如果反复多次遭到火灾危害,还会成为荒草地,甚至变成裸地。例如,1987年“5.6”特大森林火灾之后,分布在坡度较陡的地段的森林严重火烧之后基本变成了荒草坡,生态环境严重破坏,再要恢复森林几乎是不可能的。
为了保护自然环境,避免植被损失,对于森林火灾的灭火措施尤为重要,由于森林发生火灾时火势一般较大,消防人员在直接进入林内灭火时很容易被倒塌的树木击中以及吸入大量带有害气体的烟雾导致气体中毒的问题,为解决上述问题现设计一种用于森林灭火的智能机器人能有效的解决传统的森林灭火措施安全措施差以及灭火效率较低的问题。
发明内容
本发明的目的在于提供一种用于森林灭火的智能机器人,解决传统的森林灭火措施安全措施差以及灭火效率较低的问题。
为解决上述技术问题,本发明是通过以下技术方案实现的:
本发明为一种用于森林灭火的智能机器人,包括机体、功能仓、加压箱和转动盘,所述功能仓和转动盘均位于机体的上表面,所述转动盘上表面固定连接有喷水管筒,所述加压箱位于功能仓的上方,所述喷水管筒通过转动盘与机体转动配合,所述机体后表面设置有水管连接口,所述水管连接口通过机体与喷水管筒相连通,通过设置转动盘可调节喷水灭火的方向;
所述机体前表面设置有若干前置孔槽,所述前置孔槽内部设置有第一抽风风扇,所述前置孔槽一端连接有置物仓,所述一端设置有抽风管,所述抽风管与置物仓相连通,所述抽风管与置物仓连接处固定连接有石灰石网板,所述抽风管另一端设置有风道管,所述风道管一端与抽风管相连通,所述风道管另一端与加压箱相连通,通过设置第一抽风风扇抽取外部的空气和浓雾将灭过火的地面上的灰烬残渣进行吸附,进一步经过置物仓上的石灰石网板将吸附的浓雾里的二氧化硫进行反应去除并将固体残渣留存,对浓雾进行初步的过滤抽取。
优选地,所述风道管与抽风管连接处固定连接有一氧化碳过滤网板,所述风道管内部周侧面设置有第二抽风风机,当完成脱硫的浓雾经过抽风管到达一氧化碳过滤网板将其含有的一氧化碳有毒气体进行去除,最后由第二抽风风机抽送到加压箱内。
优选地,所述加压箱内部设置有加压机,所述加压箱周侧面设置有若干喷气管,所述喷气管的数量为两个,通过设置加压机对完成过滤的浓雾进行加压最后通过喷气管将其喷出对火灾处进行高速喷射提高灭火效率,同时可以增加喷水的射程增加灭火距离。
优选地,所述机体前表面设置有挖孔,所述挖孔内部设置有摄像头。
优选地,所述喷水管筒一端设置有分流板,所述分流板内部设置有若干分流管口。
优选地,所述机体两侧面均设置有若干稳定转子轴,所述稳定转子轴内部周侧面设置有转子,所述转子与稳定转子轴转动配合。
优选地,所述转子内部周侧面设置有定位齿环,所述定位齿环内部周侧面设置有活动齿轮,所述活动齿轮与定位齿环相啮合,所述活动齿轮内部设置有转轴插孔和驱动转轴,所述驱动转轴穿过转轴插孔,通过设置转子以及活动齿轮与定位齿环使得机体在移动时更加的平稳。
优选地,所述驱动转轴周侧面设置有若干伸缩筒,所述伸缩筒一端设置有伸缩柱,所述伸缩柱与伸缩筒滑动配合,所述伸缩筒内部设置有挤压弹簧,所述伸缩柱与挤压弹簧挤压配合,通过设置伸缩柱与伸缩筒代替传统的履带式移动方式可适应较为陡峭的地面的灭火措施。
本发明具有以下有益效果:
1、本发明通过设置转动盘可调节喷水灭火的方向,通过设置第一抽风风扇抽取外部的空气和浓雾将灭过火的地面上的灰烬残渣进行吸附,进一步经过置物仓上的石灰石网板将吸附的浓雾里的二氧化硫进行反应去除并将固体残渣留存,对浓雾进行初步的过滤抽取。
2、本发明通过设置第二抽风风机,当完成脱硫的浓雾经过抽风管到达一氧化碳过滤网板将其含有的一氧化碳有毒气体进行去除,最后由第二抽风风机抽送到加压箱内,通过设置加压机对完成过滤的浓雾进行加压最后通过喷气管将其喷出对火灾处进行高速喷射提高灭火效率,同时可以增加喷水的射程增加灭火距离。
当然,实施本发明的任一产品并不一定需要同时达到以上所述的所有优点。
附图说明
为了更清楚地说明本发明实施例的技术方案,下面将对实施例描述所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
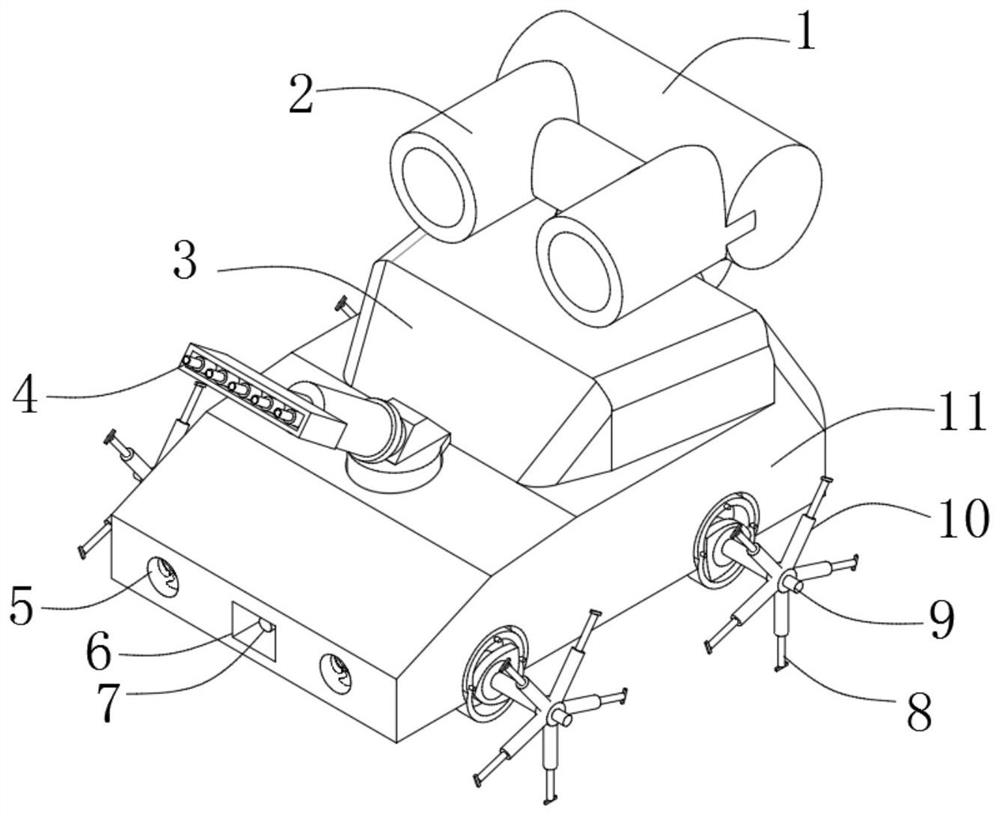
图1为一种用于森林灭火的智能机器人前视立体结构示意图;
图2为一种用于森林灭火的智能机器人后视立体结构示意图;
图3为一种用于森林灭火的智能机器人前视图;
图4为一种用于森林灭火的智能机器人俯视图;
图5为一种用于森林灭火的智能机器人前视图剖面图;
图6为一种用于森林灭火的智能机器人伸缩筒内部结构示意图;
图7为一种用于森林灭火的智能机器人稳定转子轴具体结构示意图。
附图中,各标号所代表的部件列表如下:1、加压箱;2、喷气管;3、功能仓;4、分流管口;5、前置孔槽;6、摄像头;7、挖孔;8、伸缩柱;9、驱动转轴;10、伸缩筒;11、机体;14、分流板;15、喷水管筒;16、转动盘;17、水管连接口;18、风道管;19、第一抽风风扇;20、置物仓;21、石灰石网板;22、抽风管;23、一氧化碳过滤网板;24、第二抽风风扇;25、加压机;26、挤压弹簧;27、稳定转子轴;28、转子;29、转轴插孔;30、定位齿环;31、活动齿轮。
具体实施方式
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其它实施例,都属于本发明保护的范围。
请参阅图1-7所示,本发明为一种用于森林灭火的智能机器人,包括机体11、功能仓3、加压箱1和转动盘16,功能仓3和转动盘16均位于机体11的上表面,转动盘16上表面固定连接有喷水管筒15,加压箱1位于功能仓3的上方,喷水管筒15通过转动盘16与机体11转动配合,机体11后表面设置有水管连接口17,水管连接口17通过机体11与喷水管筒15相连通,通过设置转动盘16可调节喷水灭火的方向;
机体11前表面设置有若干前置孔槽5,前置孔槽5内部设置有第一抽风风扇19,前置孔槽5一端连接有置物仓20,20一端设置有抽风管22,抽风管22与置物仓20相连通,抽风管22与置物仓20连接处固定连接有石灰石网板21,抽风管22另一端设置有风道管18,风道管18一端与抽风管22相连通,风道管18另一端与加压箱1相连通,通过设置第一抽风风扇19抽取外部的空气和浓雾将灭过火的地面上的灰烬残渣进行吸附,进一步经过置物仓20上的石灰石网板21将吸附的浓雾里的二氧化硫进行反应去除并将固体残渣留存,对浓雾进行初步的过滤抽取。
进一步地,风道管18与抽风管22连接处固定连接有一氧化碳过滤网板23,风道管18内部周侧面设置有第二抽风风机24,当完成脱硫的浓雾经过抽风管22到达一氧化碳过滤网板23将其含有的一氧化碳有毒气体进行去除,最后由第二抽风风机24抽送到加压箱1内。
进一步地,加压箱1内部设置有加压机25,加压箱1周侧面设置有若干喷气管2,喷气管2的数量为两个,通过设置加压机25对完成过滤的浓雾进行加压最后通过喷气管2将其喷出对火灾处进行高速喷射提高灭火效率,同时可以增加喷水的射程增加灭火距离。
进一步地,机体11前表面设置有挖孔7,挖孔7内部设置有摄像头6。
进一步地,喷水管筒15一端设置有分流板14,分流板14内部设置有若干分流管口4。
进一步地,机体11两侧面均设置有若干稳定转子轴27,稳定转子轴27内部周侧面设置有转子28,转子28与稳定转子轴27转动配合。
进一步地,转子28内部周侧面设置有定位齿环30,定位齿环30内部周侧面设置有活动齿轮31,活动齿轮31与定位齿环30相啮合,活动齿轮31内部设置有转轴插孔29和驱动转轴9,驱动转轴9穿过转轴插孔29,通过设置转子28以及活动齿轮31与定位齿环30使得机体1在移动时更加的平稳。
进一步地,驱动转轴9周侧面设置有若干伸缩筒10,伸缩筒10一端设置有伸缩柱8,伸缩柱8与伸缩筒10滑动配合,伸缩筒10内部设置有挤压弹簧26,伸缩柱8与挤压弹簧26挤压配合,通过设置伸缩柱8与伸缩筒10代替传统的履带式移动方式可适应较为陡峭的地面的灭火措施。
实施例:
下面是一种用于森林灭火的智能机器人的使用方法:通过水管连接口17使用机体11与喷水管筒15相连通,并驱动转动盘16可调节喷水灭火的方向,进一步的启动第一抽风风扇19抽取外部的空气和浓雾将灭过火的地面上的灰烬残渣进行吸附,进一步经过置物仓20上的石灰石网板21将吸附的浓雾里的二氧化硫进行反应去除并将固体残渣留存,对浓雾进行初步的过滤抽取,当完成脱硫的浓雾经过抽风管22到达一氧化碳过滤网板23将其含有的一氧化碳有毒气体进行去除,最后由第二抽风风机24抽送到加压箱1内,启动加压箱1内的加压机25对完成过滤的浓雾进行加压最后通过喷气管2将其喷出对火灾处进行高速喷射提高灭火效率,同时可以增加喷水的射程增加灭火距离,其中所使用的加压机25型号为DGV02。
值得注意的是,上述系统实施例中,所包括的各个组件只是按照功能逻辑进行划分的,但并不局限于上述的划分,只要能够实现相应的功能即可;另外,各功能组件的具体名称也只是为了便于相互区分,并不用于限制本发明的保护范围。
在本说明书的描述中,参考术语“一个实施例”、“示例”、“具体示例”等的描述意指结合该实施例或示例描述的具体特征、结构、材料或者特点包含于本发明的至少一个实施例或示例中。在本说明书中,对上述术语的示意性表述不一定指的是相同的实施例或示例。而且,描述的具体特征、结构、材料或者特点可以在任何的一个或多个实施例或示例中以合适的方式结合。
以上公开的本发明优选实施例只是用于帮助阐述本发明。优选实施例并没有详尽叙述所有的细节,也不限制该发明仅为所述的具体实施方式。显然,根据本说明书的内容,可作很多的修改和变化。本说明书选取并具体描述这些实施例,是为了更好地解释本发明的原理和实际应用,从而使所属技术领域技术人员能很好地理解和利用本发明。本发明仅受权利要求书及其全部范围和等效物的限制。
- 一种用于森林灭火的智能机器人
- 一种应用于智能机器人的应用接入方法及智能机器人