一种用于移动机器人的金属板面清洁装置
文献发布时间:2023-06-19 11:37:30
技术领域
本发明属于移动机器人技术领域,涉及移动机器人清洁装置,尤其是一种用于移动机器人的金属板面清洁装置。
背景技术
机器人能够进入人们视野主要有以下原因:一是劳动力的成本与效率的提高;二是人们想摆脱繁琐体力活动减轻负担;三是随着社会老龄化趋势的加重,服务型设备能更加智能地代替人们从事生产任务;四是存在劳动强度大,维护成本高、存在安全隐患等问题。
由于很多特殊环境不适合人工作业,因此越来越多的科研人员开展了研究特殊环境下代替人工作业的智能机器人。特殊环境下的作业机器人主要包括巡检机器人、监测机器人、喷漆焊接机器人等以及其它智能检测和维护设备等。近年来,特殊环境下作业机器人成为研究热点,采用机器人代替人工作业是发展的必然趋势。
目前,一些行业经常需要对大型石化储罐以及船板腐蚀等高空金属板面进行清洁维护,在这种高空、高危作业环境下,存在人工作业存在危险、效率低下、人力工作强度大等问题,如何通过移动机器人搭载专用的清洁装置实现对高空金属板面进行安全、高效清洁是目前迫切需要解决的问题。
发明内容
本发明的目的在于克服现有技术的不足,提供一种设计合理、工作效率高、劳动强度低且安全可靠的用于移动机器人的金属板面清洁装置。
本发明解决现有的技术问题是采取以下技术方案实现的:
一种用于移动机器人的金属板面清洁装置,包括调节机构和清洁机构;
所述调节机构包括连接底板、焊接底板、两个焊接钢板、两个焊接钢管和多个导杆,每个导杆下端固定在连接底板上并套装有弹簧,每个导杆上端通过螺栓方式固定在焊接底板上;两个焊接钢板对称且垂直固装在焊接底板上,两个焊接钢管水平安装在两个焊接钢板上,两个焊接钢管用于与移动机器人相连接;
进一步,所述清洁机构包括多个气动马达、多个上盖板、多个百叶盘毛刷、多个下盖板,每个气动马达固定在连接底板上,每个气动马达的输入端通过气管与空气压缩机相连接,每个气动马达末端输出轴与上盖板相连接,上盖板与下盖板将百叶盘毛刷夹紧,并使其与气动马达末端固定在一起,所述百叶盘毛刷在气动马达的驱动下高速旋转并对金属板面进行清洁。
进一步,所述百叶盘毛刷包括百叶盘和清洁毛刷:所述清洁毛刷呈圆周状安装在百叶盘底部。
进一步,所述导杆与焊接底板的具体安装方式为:导杆上端穿过铜套及焊接底板并通过其表面制有的螺纹与固定螺母连接在一起,通过固定螺母调节焊接底板与连接底板之间间距。
进一步,所述两个焊接钢管与两个钢板的连接关系为:两个焊接钢管水平穿过两个焊接钢板上端的通孔并与焊接钢板焊接在一起。
进一步,所述导杆和弹簧的数量均为四个。
进一步,所述气动马达、上盖板、百叶盘毛刷和下盖板的数量均为三个。
进一步,所述调节机构通过两个焊接钢管安装在移动机器人的前端位置。
进一步,所述移动机器人包括轮式结构移动机器人、履带式结构移动机器人和腿式结构移动机器人。
本发明的优点和积极效果是:
1、本发明作为末端执行机构可以安装在移动机器人上,并在移动机器人的驱动下移动到指定的位置进行金属板面清洁任务,实现了对高空金属板面进行安全、高效的清洁功能,降低了人工作业的危害,可广泛用于船舶船板、储罐等金属板面清洁环境。
2、本发明通过调节机构可以调节百叶盘毛刷与接触面之间距离,从而使百叶盘毛刷与接触面产生柔性接触,不易损伤表面。
3、本发明通过三个气动马达同时驱动三个百叶盘毛刷工作,扩大其清洁面积,能够极大提高人工作业效率。
4、本发明采用气压传动方式,空气来源方便,用后直接排出,无污染。其中空气黏度小,气体在传输中摩擦力较小,故可以集中供气和远距离输送。工作环境适应性好,特别在易燃、易爆、多尘埃、强磁、辐射、振动等恶劣环境可以有较强的适用性。
5、本发明结构紧凑、体积小,可快捷、简便地安装在多种类型的移动机器人上,任一移动机器人只需通过两个固定焊接钢管即可搭载该执行末端机构使其进行作业,扩大了其应用范围。
6、本发明可以与移动机器人控制系统相互配合,通过视觉系统反馈自动调节百叶盘毛刷与接触面的力度,也能判断是否刷洗干净决定是否反复刷洗;通过远程控制系统可以人工干预机器人的工作指令,实现人机互助,完成更加复杂的工作或者更加出色的完成工作。
附图说明
图1是本发明的整体结构图;
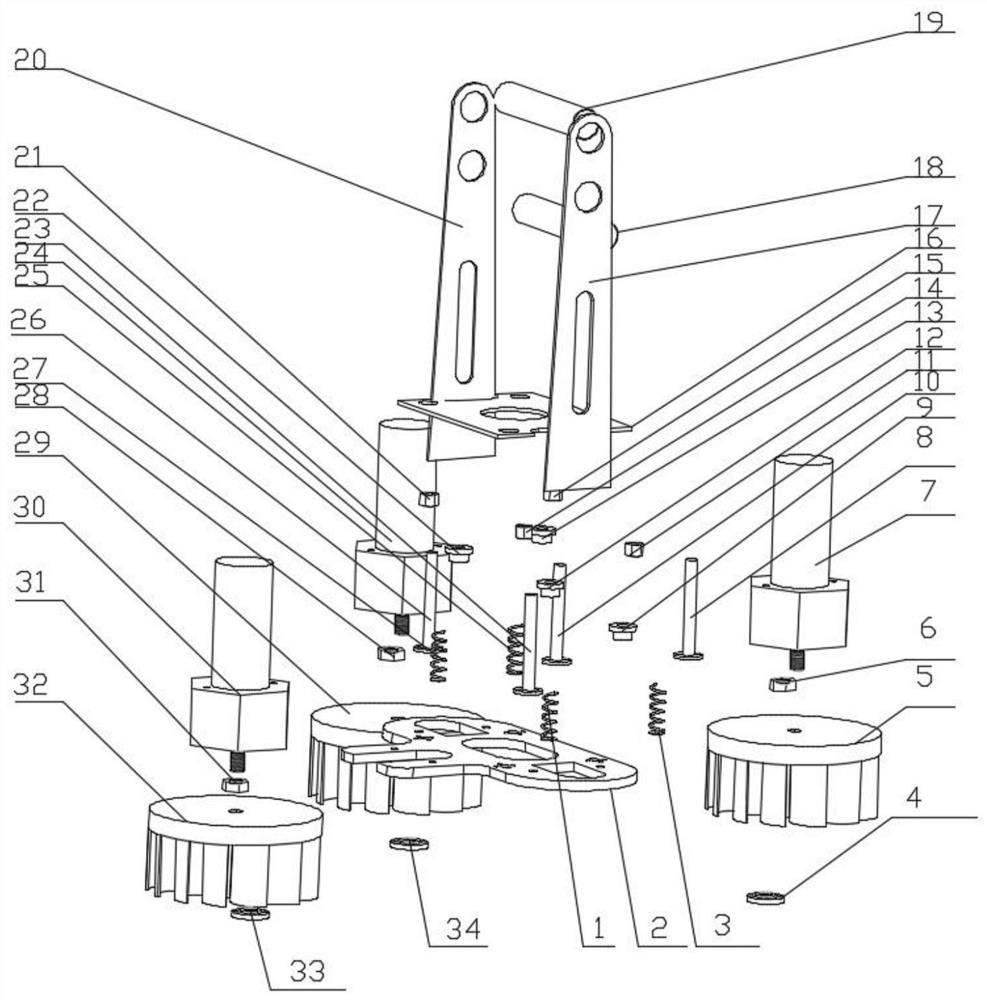
图2是本发明的爆炸图;
图中,1-第一弹簧,2-连接底板,3-第二弹簧,4-第一下盖板,5-第一百叶盘毛刷,6-第一上盖板,7-第一气动马达,8-第一导杆,9-第一铜套,10-第二导杆,11-第一固定螺母,12-第二铜套,13-第三铜套,14-第二固定螺母,15-第三固定螺母,16-焊接底板,17-第一焊接钢板,18-第一焊接钢管,19-第二焊接钢管,20-第二焊接钢板,21-第四固定螺母,22-第四铜套,23-第三导杆;24-第二气动马达,25-第三弹簧,26-第四导杆,27-第四弹簧,28-第二上盖板,29-第二百叶盘毛刷,30-第三气动马达,31-第三上盖板,32-第三百叶盘毛刷,33-第二下盖板,34-第三下盖板。
具体实施方式
以下结合附图对本发明实施例做进一步详述。
一种用于移动机器人的金属板面清洁装置,如图1及图2所示,包括调节机构和清洁机构,其中:
所述调节机构包括连接底板2、焊接底板16、第一导杆8、第二导杆10、第三导杆23、第四导杆26、第一弹簧1、第二弹簧3、第三弹簧25、第四弹簧27、第一固定螺母11、第二固定螺母14、第三固定螺母15、第四固定螺母21、第一铜套9、第二铜套12、第三铜套13、第四铜套22、第一焊接钢管18、第二焊接钢管19、第一焊接钢板17、第二焊接钢板20。该调节机构的具体安装关系为:所述第一导杆8、第二导杆10、第三导杆23、第四导杆26固定在连接底板2上,将第一弹簧1、第二弹簧3、第三弹簧25、第四弹簧27分别套进第一导杆8、第二导杆10、第三导杆23、第四导杆26上,第一导杆8、第二导杆10、第三导杆23、第四导杆26上端分别穿过第一铜套9、第二铜套12、第三铜套13、第四铜套22以及焊接底板16,并通过第一固定螺母11、第二固定螺母14、第三固定螺母15、第四固定螺母21与四个导杆末端处形成螺纹连接,从而连接底板2与焊接底板16固定在一起,通过固定螺母调节焊接底板16与连接底板2之间间距。所述第一焊接钢板17、第二焊接钢板20对称且垂直固装在焊接底板16上,所述第一焊接钢管18、第二焊接钢管19分别水平穿过第一焊接钢板17、第二焊接钢板20上端的通孔且并与第一焊接钢板17、第二焊接钢板20焊接成一体。第一焊接钢管18、第二焊接钢管19可用于与移动机器人安装在一起。
所述清洁机构包括第一气动马达7、第二气动马达24、第三气动马达30、第一上盖板6、第一百叶盘毛刷5、第一下盖板4、第二上盖板28、第二百叶盘毛刷29、第二下盖板33、第三上盖板31、第三百叶盘毛刷32和第三下盖板34。其具体连接关系为:所述第一气动马达7、第二气动马达24、第三气动马达30分别通过螺钉固定在连接底板2上,气动马达的输入端通过气管与空气压缩机相连接,空气压缩机通常安装在地面或其他固定地方,并不随清洁机构或移动机器人移动。第一气动马达7末端输出轴与第一上盖板6相连接,第一上盖板6与第一下盖板4将第一百叶盘毛刷5夹紧,使其与第一气动马达7末端相连接。第二气动马达24输出轴与第二上盖板28相连接,再由第二上盖板28与第二下盖板33将第二百叶盘毛刷盘29夹紧,使其与第二气动马达24末端相连接。第三气动马达30输出轴与第三上盖板31相连接,再由第三上盖板31与第三下盖板34将第三百叶盘毛刷32夹紧,使其与第三气动马达30末端相连接。该清洁机构通过三个上下盖板可将三个百叶盘毛刷固定在气动马达底部输出轴处,使三个百叶盘毛刷与清洁平面相互接触。当空气压缩机打开后,其产生压缩空气通过气管传送至气动马达使其输出轴高速旋转,再由高速旋转的输出轴带动百叶盘毛刷高速旋转使其可以快速高效的清洁表面。当百叶盘毛刷触碰表面时会受到一个作用力,通过固定弹簧施加一个反作用力抵消百叶盘毛刷触碰表面受到的作用力,能够使其产生更好的清洁效果。
本发明提供的金属板面清洁装置作为机器人的末端执行机构,可以安装在轮式、履带式、腿式等多种结构的移动机器人上。其安装方法为:将调节机构上的第一焊接钢管18、第二焊接钢管19安装在机器人前端处。安装有本发明的移动机器人在平面以及壁面上运动至所需清洁位置时,由金属板面清洁装置进行表面清洁作业。
移动机器人通常安装有监控摄像头,通过云台摄像头监测周围环境,并将监控摄像头采集的监控画面传给地面监视设备上,监测金属板面清洁装置的工作效果。
本发明未述及之处适用于现有技术。
需要强调的是,本发明所述的实施例是说明性的,而不是限定性的,因此本发明包括并不限于具体实施方式中所述的实施例,凡是由本领域技术人员根据本发明的技术方案得出的其他实施方式,同样属于本发明保护的范围。
- 一种用于移动机器人的金属板面清洁装置
- 一种用于彩钢板板面清洁装置