两栖机器人
文献发布时间:2023-06-19 11:54:11
技术领域
本发明涉及机器人技术领域,特别是涉及一种两栖机器人。
背景技术
随着多学科、多专业的融合发展,机器人技术的应用领域不断扩展。从工业自动化生产流水线到家用服务型机器人,从海洋资源、煤矿资源开发到太空探索,从野外侦察到灾害救援,机器人几乎到处可见。对于未知环境的探索充满着不稳定因素,人工探索危险性大,稍有不慎,甚至会付出生命代价。因此,机器人在未知环境的探索和开发中同样发挥着重要的作用。
无人机具有运动灵活、运动速度快,视野广的特点,但其只能在宽阔的环境里飞行,在狭小复杂空间中难以飞行。移动机器人虽然可在地面狭小空间运动,但只能缓慢通过,前行困难,当遇到湖泊或大型障碍物时,无法通过。因此,单栖机器人更适用于单一场景的工作环境,难以适应复杂环境。
发明内容
基于此,有必要针对单栖机器人难以适应复杂环境的问题,提供一种可适应较复杂环境的两栖机器人。
一种两栖机器人,包括飞行机构与行走机构,所述飞行机构包括安装板、两组旋翼、联动部与舵机,所述两组旋翼分别转动安装于所述安装板的首部与尾部,所述旋翼包括旋臂、螺旋桨与旋翼电机,所述旋臂的一端转动安装于所述安装板上,另一端安装所述旋翼电机,所述螺旋桨安装于所述旋翼电机的输出轴上,所述舵机安装于所述安装板的下方,所述舵机的输出轴通过所述联动部与所述旋臂联动,分别位于安装板首部与尾部的旋翼的旋臂不共面,所述安装板承载于所述行走机构上。
进一步的,所述安装板包括顶板与底板,所述联动部安装于所述顶板与底板之间,所述首部与尾部的旋翼的旋臂分别位于所述顶板与底板远离所述联动部的一侧。
进一步的,所述联动部包括同步带、舵机轮、辅助轮、两个旋臂轮与两个旋臂轮轴,所述两个旋臂轮轴的一端分别与所述两个旋臂轮的轮孔过盈配合,另一端分别穿过所述顶板与底板,并分别固定于所述首部与尾部的旋翼的旋臂上,所述辅助轮与一个旋臂轮通过所述同步带传动连接,并位于所述同步带的内侧,另一个旋臂轮与舵机轮分别与所述同步带密接,并分别位于所述同步带的外侧。
进一步的,所述舵机轮、辅助轮与两个旋臂轮均为齿轮,所述同步带为双面齿形带,所述同步带夹设并啮合于所述辅助轮与所述另一个旋臂轮之间。
进一步的,所述行走机构包括底板、车轮与车轮电机,所述车轮电机安装于所述底盘上,所述车轮连接所述车轮电机的输出轴。
进一步的,还包括摄像头,所述摄像头安装于所述安装板上并位于所述机器人的前端。
进一步的,还包括超声波传感器,所述超声波传感器安装于所述行走机构上并位于所述机器人的前端。
进一步的,所述机器人还包括控制模块,所述控制模块包括树莓派、飞行控制器与单片机,所述树莓派分别电连接所述飞行控制器与单片机,所述树莓派电连接摄像头,所述飞行控制器电连接旋翼电机,所述单片机分别电连接舵机、车轮电机与超声波传感器。
进一步的,所述机器人还包括电源模块,所述电源模块为所述飞行机构、行走机构与控制模块供电。
上述两栖机器人,既能实现空中飞行也可以地面行走,以地面行走为主,当地面有较大障碍物难以通过时可以飞行通过,当空间狭小时,旋翼可收缩,以减小运动空间,保证机器人行走通过,可适应较复杂环境。
附图说明
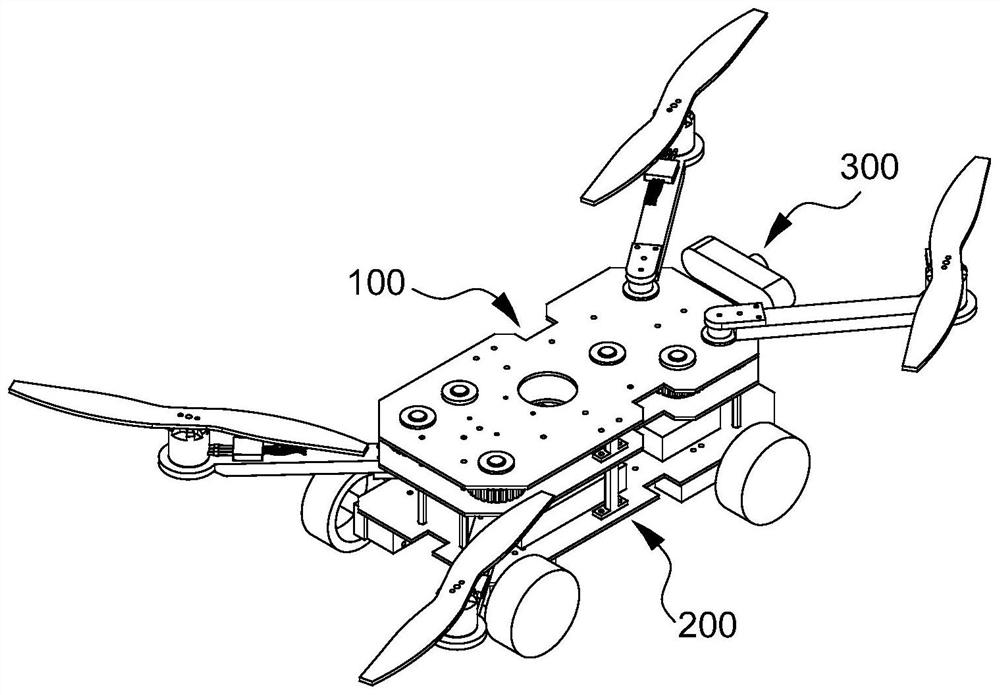
图1为一个实施例的两栖机器人的机构示意图;
图2为图1中两栖机器人另一角度示意图;
图3为图1中两栖机器人的侧视图;
图4为图1中去顶板的两栖机器人的俯视图;
图5为图1中两栖机器人的旋翼收缩状态示意图;
图6为图1中两栖机器人控制模块电性连接图。
图中:100、飞行机构;110、安装板;111、顶板;112、底板;120、旋翼;121、旋臂;122、螺旋桨;123、旋翼电机;1201、首部旋翼;1202、尾部旋翼;130、联动部;131、同步带;132、舵机轮;133、辅助轮;134、旋臂轮;1341、首部旋臂轮;1342、尾部旋臂轮;135、旋臂轮轴;140、舵机;200、行走机构;210、底盘;220、车轮;230、车轮电机;300、摄像头;400、超声波传感器;500、控制模块;510、树莓派;520、飞行控制器;530、单片机;600、电源模块。
具体实施方式
为使本发明实施例的目的、技术方案和优点更加清楚,下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地说明,显然,所描述的实施例是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
如图1至图5所示,在一个实施例中,一种两栖机器人,包括飞行机构100与行走机构200。飞行机构100包括安装板110、两组旋翼120、联动部130与舵机140。两组旋翼120分别转动安装于安装板110的首部与尾部,具体的,每组旋翼120由两个旋翼组成,安装板110首部的为首部旋翼1201,尾部的为尾部旋翼1202。旋翼120包括旋臂121、螺旋桨122与旋翼电机123,旋臂121的一端转动安装于安装板110上,另一端安装旋翼电机123,螺旋桨122安装于旋翼电机123的输出轴上。舵机140安装于安装板110的下方。舵机140的输出轴通过联动部130与旋臂121联动,分别位于安装板110首部与尾部的旋翼120的旋臂不共面,即首部旋翼1201与尾部旋翼1202位于不同的平面,以保证旋翼120最大程度收缩,且收缩时相互间不会发生碰撞。安装板110承载于行走机构200上。
上述两栖机器人,既能实现空中飞行也可以地面行走,以地面行走为主,当地面有较大障碍物难以通过时可以飞行通过,当空间狭小时,旋翼120可收缩,以减小运动空间,保证机器人行走通过,可适应较复杂环境。
在本实施例中,安装板110包括顶板111与底板112。联动部130安装于顶板111与底板112之间,首部与尾部的旋翼120的旋臂121分别位于顶板111与底板112远离联动部130的一侧。具体的,两个首部旋翼1201位于顶板111的上方,两个尾部旋翼1202位于底板112的下方,因此,二者收缩或展开时相互之间不会发生碰撞或者摩擦干扰。
在本实施例中,联动部130包括同步带131、舵机轮132、辅助轮133、两个旋臂轮134与两个旋臂轮轴135。两个旋臂轮轴135的一端分别与两个旋臂轮134的轮孔过盈配合,另一端分别穿过顶板111与底板112,并分别固定于首部与尾部的旋翼120的旋臂121上。辅助轮133与一个旋臂轮134通过同步带131传动连接,并位于同步带131的内侧,另一个旋臂轮134与舵机轮132分别与同步带131密接,并分别位于同步带131的外侧。具体的,联动部130包括两条同步带131、一个舵机轮132、两个辅助轮133、四个旋臂轮134与四个旋臂轮轴135。其中,四个旋臂轮134包括两个首部旋臂轮1341与两个尾部旋臂轮1342。其中,一个首部旋臂轮1341与一个辅助轮133通过一条同步带131连接,且一个尾部旋臂轮1342与该一条同步带131的外侧密接。另一个尾部旋臂轮1342与另一个辅助轮133通过另一条同步带131连接,且另一个首部旋臂轮1341与该另一条同步带131的外侧密接。舵机轮132位于两条同步带131之间且与该两条同步带131的外侧密接(紧密接触)。
在本实施例中,舵机轮132、辅助轮133与两个旋臂轮134均为齿轮,同步带131为双面齿形带,同步带131夹设并啮合于辅助轮133与另一个旋臂轮134之间。
在本实施例中,行走机构200包括底盘210、车轮220与车轮电机230。车轮电机230安装于底盘210上,车轮220连接车轮电机230的输出轴。
在本实施例中,两栖机器人还包括摄像头300、超声波传感器400与电源模块600,摄像头300安装于安装板110上并位于机器人的前端。超声波传感器400安装于底盘210上并位于机器人的前端。电源模块600安装于底盘210的下方,为飞行机构100、行走机构200、摄像头300与超声波传感器400供电。
如图6所示,机器人还包括控制模块500。控制模块500包括树莓派510、飞行控制器520与单片机530。树莓派510分别电连接飞行控制器520与单片机530,树莓派510电连接摄像头300。飞行控制器520电连接旋翼电机123。单片机530分别电连接舵机140、车轮电机230与超声波传感器400。电源模块600为控制模块500供电。摄像头300用于拍摄机器人前方的路面信息,并与树莓派510进行图像处理,树莓派510与单片机530连接,将选用的运动模式和位置信息传递给单片机530。单片机530用于控制舵机140进一步控制旋翼收缩或者展开。且单片机530用于控制车轮电机控制机器人前进和转向。在地面前进过程中,超声波传感器400检测前方是否存在障碍物,并将信息传递给单片机530,单片机530控制机器人转向,飞行控制器520用于控制旋翼电机123控制机器人的前进和转向。
该两栖机器人结构紧凑,体积小,可自主识别路面情况并分析结果自主选择飞行模式和行走模式,旋翼收缩结构可提升行走时整体的稳定性,可以在复杂的环境下工作。两栖机器人地面运动功率比飞行时耗电功率小得多,该机器人增加了地面行走时长占比,其续航能力可一定程度上提高。
该两栖机器人还可用于例如大楼内的巡逻任务。将机器人放置于大楼内,根据设定好的巡逻点,由树莓派中内置的路径算法进行路径规划,单片机驱动车轮电机从而驱动机器人地面行走。工作期间,摄像头识别道路情况,进行避障或者切换运动模式。当避障时,树莓派重新规划路径,并将路径点信息传递给单片机,控制车轮电机转速和转向从而控制机器人前进方向完成避障;当切换为飞行模式时,树莓派将信息传递给单片机,控制舵机转动,旋翼折展机构展开,且飞行控制器控制旋翼电机转动,实现飞行模式。
以上所述实施例仅表达了本发明的几种实施方式,其描述较为具体和详细,但并不能因此而理解为对本发明专利范围的限制。应当指出的是,对于本领域的普通技术人员来说,在不脱离本发明构思的前提下,还可以做出若干变形和改进,这些都属于本发明的保护范围。因此,本发明专利的保护范围应以所附权利要求为准。
- 一种蛇形两栖机器人浮力调节装置及两栖机器人
- 水陆两栖机器人以及水陆两栖侦查系统