一种设备姿态侦测与调整装置及方法
文献发布时间:2023-06-19 11:57:35
技术领域
本发明涉及光伏设备检测领域,特别涉及一种设备姿态侦测与调整装置及方法。
背景技术
随着城市化的不断推进,光伏系统的年均装机量也在急剧上升。其中,光伏板的相关辅助设备也应运而生,如光伏清扫设备、光伏板牵引设备等等。
基于光伏板铺设面积大、结构较长的特点,上述相关辅助设备的共同点为移动式作业,由此,移动位置的精准性和稳定性成为上述辅助设备的技术改进关键点。
发明内容
本发明提供了一种设备姿态侦测与调整装置及方法,用于解决相关技术中光伏板辅助相关设备移动稳定性和精准性待提高的问题。所述方案如下:
一方面,本发明提供一种设备姿态侦测与调整装置,所述设备姿态侦测与调整装置包括:至少两组牵引机构、控制端和机罩;
各组牵引机构由牵引电机、牵引链条、链轮和牵引距离记录传感装置;
各组牵引机构中,所述牵引链条的一端固定于所述机罩处;所述牵引链条的另一端与所述牵引电机相连,所述牵引链条通过所述牵引电机与所述链轮张紧,所述牵引链条用于在所述牵引电机驱动下带动所述链轮转动;所述牵引链条还与所述牵引距离记录传感装置配合,所述牵引距离记录传感装置用于记录所述牵引链条的牵引距离;
各组牵引机构中,所述牵引电机与所述控制端电性连接,所述控制端用于为所述牵引电机提供电能和控制信号;
所述控制端还用于通过无线通信方式与所述牵引距离记录传感装置进行信息交互。
可选的,所述牵引距离记录传感装置设有转动件,在所述牵引链条带动下,所述转动件转动;
所述牵引距离记录传感装置还用于根据所述转动件的转动距离确定出所述牵引链条的牵引距离。
可选的,所述转动件为光栅或转盘。
可选的,所述牵引电机与所述牵引链条的数量一致。
可选的,各个所述牵引电机的安装方式为分开安装方式和集中安装方式中的一种。
另一方面,本发明提供一种设备姿态侦测与调整方法,所述方法适用于上述所述的设备姿态侦测与调整装置,所述方法包括:
所述控制端启动各台牵引电机,所述牵引距离记录传感装置启动,其中,所述牵引链条在所述牵引电机带动下进行牵引运动,所述链轮在与所述牵引链条张紧状态下转动;
所述控制端获取所述牵引距离记录传感装置记录的牵引距离数据;
所述控制端根据所述牵引距离数据,确定出各个链轮之间的牵引距离差值;
所述控制端根据所述牵引距离差值和设备长度控制所述设备的姿态。
可选的,所述控制端根据所述牵引距离差值和设备长度控制所述设备的姿态,包括:
所述控制端根据所述牵引距离差值和设备长度判断所述设备的姿态;
响应于所述设备的姿态处于歪斜状态,所述控制端控制所述牵引电机对所述设备的歪斜进行纠正。
本发明至少带来的有益效果如下:
在本发明实施例中,通过设置的至少两组牵引机构来牵引设备本体前进,在各组牵引机构中包括有牵引电机、牵引链条、链轮和牵引距离记录传感装置,控制端还与牵引距离记录传感装置进行信息交互;从而实现控制端根据牵引距离记录传感装置记录的牵引距离数据来控制设备姿态,在歪斜时对设备姿态进行纠正,提高了设备移动稳定性;此外,牵引电机与控制端连接,在获取牵引距离条件下控制端对牵引电机实现控制,有效保证了设备移动的精准性。
附图说明
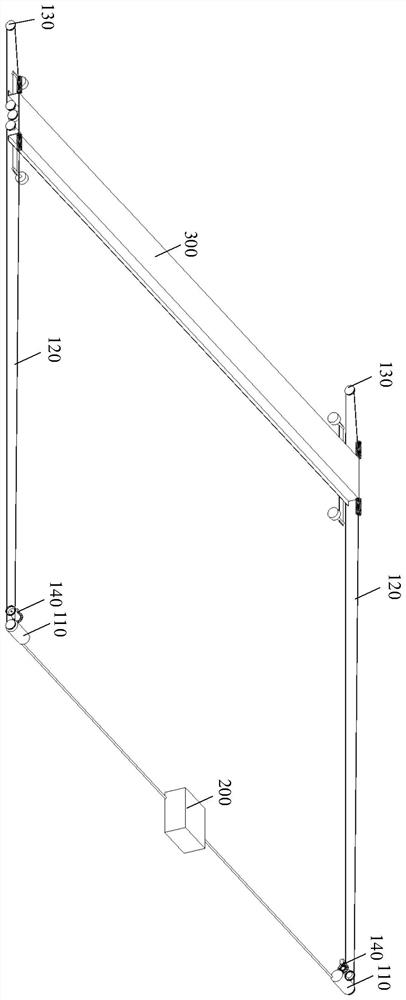
图1示出了本申请一个示意性实施例提供的设备姿态侦测与调整装置的结构示意图;
图2示出了本申请一个示意性实施例提供的设备姿态侦测与调整方法的流程示意图。
通过上述附图,已示出本公开明确的实施例,后文中将有更详细的描述。这些附图和文字描述并不是为了通过任何方式限制本公开构思的范围,而是通过参考特定实施例为本领域技术人员说明本公开的概念。
具体实施方式
为使本发明的目的、技术方案和优点更加清楚,下面将结合附图对本发明实施方式作进一步地详细描述。
在本文中提及的“多个”是指两个或两个以上。“和/或”,描述关联对象的关联关系,表示可以存在三种关系,例如,A和/或B,可以表示:单独存在A,同时存在A和B,单独存在B这三种情况。字符“/”一般表示前后关联对象是一种“或”的关系。
实施例1
请参考图1,其示出了本申请一个示意性实施例提供的设备姿态侦测与调整装置的结构示意图。
本发明实施例中提供了一种设备姿态侦测与调整装置,该设备姿态侦测与调整装置包括至少两组牵引机构、控制端200和机罩00。
如图1所示,本发明实施例以设置两组牵引机构为例进行示意性的说明,但对牵引机构的数目不作限定。
各组牵引机构由牵引电机110、牵引链条120、链轮10和牵引距离记录传感装置140。
各组牵引机构中,牵引链条120的一端固定于机罩00处;牵引链条120的另一端与牵引电机110相连,牵引链条120通过牵引电机110与链轮10张紧,牵引链条120用于在牵引电机110驱动下带动链轮10转动;牵引链条120还与牵引距离记录传感装置140配合,牵引距离记录传感装置140用于记录牵引链条120的牵引距离。
各组牵引机构中,牵引电机110与控制端200电性连接,控制端200用于为牵引电机110提供电能和控制信号。
控制端200还用于通过无线通信方式与牵引距离记录传感装置140进行信息交互。
综上所述,在本发明实施例中,通过设置的至少两组牵引机构来牵引设备本体前进,在各组牵引机构中包括有牵引电机、牵引链条、链轮和牵引距离记录传感装置,控制端还与牵引距离记录传感装置进行信息交互;从而实现控制端根据牵引距离记录传感装置记录的牵引距离数据来控制设备姿态,在歪斜时对设备姿态进行纠正,提高了设备移动稳定性;此外,牵引电机与控制端连接,在获取牵引距离条件下控制端对牵引电机实现控制,有效保证了设备移动的精准性。
实施例2
请继续参考图1,本申请实施例对上述设备姿态侦测与调整装置的结构作进一步的说明。
可选的,牵引距离记录传感装置140设有转动件,在牵引链条120带动下,转动件转动,其中,牵引链条120与转动件机械相连,牵引链条120运动,继而带动转动件转动,从而牵引距离记录传感装置140可以根据转动件的转动距离来间接确定出牵引链条120的牵引距离。
可选的,转动件为光栅或转盘。
可选的,半申请实施例对牵引机构的数量不作限定,但其中需满足牵引电机110与牵引链条120数量一致的要求。
可选的,各个牵引电机110的安装方式为分开安装方式和集中安装方式中的一种。
本发明实施例中,进一步公开了牵引距离记录传感装置记录牵引距离的过程,转动件为光栅或转盘,使得牵引距离记录传感装置对转动件不作严格限定。
本发明实施例中,牵引电机的安装方式为分开安装方式和集中安装方式中的一种,可以集中安装在一个箱体或多个箱体里面,提高了安装方式的多样性。
实施例3
请参考图2,其示出了本申请一个示意性实施例提供的设备姿态侦测与调整方法的流程示意图,该方法包括:
步骤201,控制端启动各台牵引电机,牵引距离记录传感装置启动,其中,牵引链条在牵引电机带动下进行牵引运动,链轮在与牵引链条张紧状态下转动。
在一种可能的实施方式中,控制端启动牵引电机后,通过对牵引机构进行控制,实现对设备的移动控制。
步骤202,控制端获取牵引距离记录传感装置记录的牵引距离数据。
其中,控制端与牵引距离记录传感装置通过无线通讯方式进行信息交互,从而控制端获取牵引距离记录传感装置记录的牵引距离数据。
步骤203,控制端根据牵引距离数据,确定出各个链轮之间的牵引距离差值。
在一个示例中,控制端根据各个牵引机构的牵引距离数据,确定出各个链轮之间的牵引距离差值,其中,牵引距离差值显示出各个牵引机构是存在牵引误差的,有快有慢,从而导致行进误差,进行影响设备的姿态。
步骤204,控制端根据牵引距离差值和设备长度控制设备的姿态。
在一种可能的实施方式中,步骤204包括如下内容一和内容二。
内容一、控制端根据牵引距离差值和设备长度判断设备的姿态。
内容二、响应于设备的姿态处于歪斜状态,控制端控制牵引电机对设备的歪斜进行纠正。
本申请实施例中,提供了一种设备姿态侦测与调整方法,为设备姿态侦测与调整装置的使用提供了方法参考,其中,通过牵引距离记录传感装置感知设备多端的牵引距离差值,再综合设备长度来评判设备姿态歪斜,反向计算多端牵引电机通过速差的形式或反转的形式来及时精准弥补设备歪斜。
以上所述仅为本发明的可选实施例,并不用以限制本发明,凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
- 一种设备姿态侦测与调整装置及方法
- 一种基于工业机器人的物体姿态调整装置及姿态调整方法