双边磁通切换型磁悬浮永磁直线同步电动机及其控制方法
文献发布时间:2023-06-19 11:57:35
技术领域
本发明涉及轨道交通等长定子场合技术领域,尤其涉及一种双边磁通切换型磁悬浮永磁直线同步电动机及其控制方法。
背景技术
随着城市轨道交通的快速发展,直线电机在该领域的应用得到广泛关注。对于长行程轨道交通领域,传统的永磁同步电机无论是将线圈还是永磁体沿轨道铺设,成本都将非常昂贵,后期维护也会很麻烦,而磁通切换型直线电机却可以将其导磁铁心沿轨道铺设,将其永磁体和电枢绕组都放置于初级动子上,可以大大降低轨道的铺设成本和后期维护费用,而且兼具永磁同步直线电机功率密度高和直线感应电机定子结构简单的优点。
申请号为201210497711.5的发明专利“一种磁通切换型磁悬浮永磁直线同步电机及其控制方法”,将磁悬浮原理引入到磁通切换型永磁直线电机中,该电机只有一套绕组。利用电机的永磁磁场,控制电机电流的励磁分量对永磁磁场进行増磁或者去磁,使电机的法向力(磁悬浮力)与电机动子的重力平衡,实现电机动子的稳定悬浮,解决了电机运行中的摩擦问题。然而该电机只有一套绕组,需要在控制中对其解耦,控制起来相当复杂,不容易使其稳定,并且该电机无法解决磁通切换型电机的自身固有的推力波动大的问题。
发明内容
本发明要解决的技术问题是针对上述现有技术的不足,提供一种双边磁通切换型磁悬浮永磁直线同步电动机及其控制方法,解决仅有一套绕组的磁通切换型磁悬浮永磁直线同步电动机控制复杂、以及推力波动大的问题。
为解决上述技术问题,本发明所采取的技术方案是:
一方面,本发明提供一种双边磁通切换型磁悬浮永磁直线同步电动机,包括长次级支撑体和支撑壳体,还包括上初级模块和下初级模块;上初级模块和下初级模块均对称设有左右两个,左右两个上初级模块连接在支撑壳体的内上部,左右两个下初级模块设置在支撑壳体的内下部,两个上初级模块与两个下初级模块上下对称;
所述上初级模块和下初级模块的组成结构完全一致,且同时同向运动;上初级模块和下初级模块均包括m个或者2m个初级模块,m为电动机的相数;
长次级支撑体的左右两端设置有双边长次级,所述双边长次级包括上组双边长次级和下组双边长次级,上、下两组双边长次级均包括左右两个长次级;上组双边长次级的位置对应上初级模块,下组双边长次级的位置对应下初级模块,上组双边长次级与上初级模块之间、下组双边长次级与下初级模块之间均设有气隙;
初级模块包括两个U型导磁材料和设置在两个U型导磁材料之间的永磁体,不同初级模块的永磁体交替平行充磁;初级模块还包括电枢绕组,设置在初级模块的U型槽中,且套住永磁体;
相邻初级模块之间填充非导磁材料;同一相的两个初级模块的距离为λ
另一方面,本发明还提供一种上述双边磁通切换型磁悬浮永磁直线同步电动机的控制方法,该方法包括电机速度控制方法和悬浮控制方法两部分;
电机速度控制方法中,稳定运行时,由上初级模块提供电磁推力,具体如下:
步骤1.1:通过位置速度传感器测量上初级模块的速度和位置的变化;
步骤1.2:采用电动机的电流励磁分量i
悬浮控制方法中,稳定悬浮控制时,由下初级模块提供悬浮力,具体如下:
步骤2.1:通过重力加速度传感器,获得电动机动子重力的变化;
步骤2.2:采用电动机的电流转矩分量i
进一步地,步骤1.1中根据位置速度传感器测量上初级模块的速度v和位置θ的变化;测量实际的两相电流i
进一步地,步骤1.2的执行步骤如下:
步骤1.2.1:根据输出的三相电流i
步骤1.2.2:给定速度v
步骤1.2.3:根据在两相同步旋转坐标系下的电压u
步骤1.2.4:根据在两相静止坐标系下的电压值u
进一步地,步骤2.1中根据重力加速度传感器测量实际下初级模块的重力G的变化;测量实际的两相电流i
进一步地,步骤2.2的执行步骤如下:
步骤2.2.1:确定下初级模块的位置θ
步骤2.2.2:根据输出的三相电流i
步骤2.2.3:根据实验测出下初级模块的重力G与电流的关系,得出d轴给定电流
步骤2.2.4:根据在两相同步旋转坐标系下的电压u
步骤2.2.5:根据在两相静止坐标系下的电压值u
采用上述技术方案所产生的有益效果在于:本发明提供的双边磁通切换型磁悬浮永磁直线同步电动机及其控制方法,从电机本体结构优化与先进控制策略一体化综合分析,不仅保留了磁通切换型永磁直线同步电机在长行程应用场合具有的结构简单、成本低、功率密度高、效率高、功率因数高等优点,并且引用磁悬浮技术,解决了双边磁通切换型永磁直线同步电机电机动子的稳定悬浮问题,消除了电机运行中的摩擦,还采用双边错齿结构,有效的减小了电机的推力波动。
附图说明
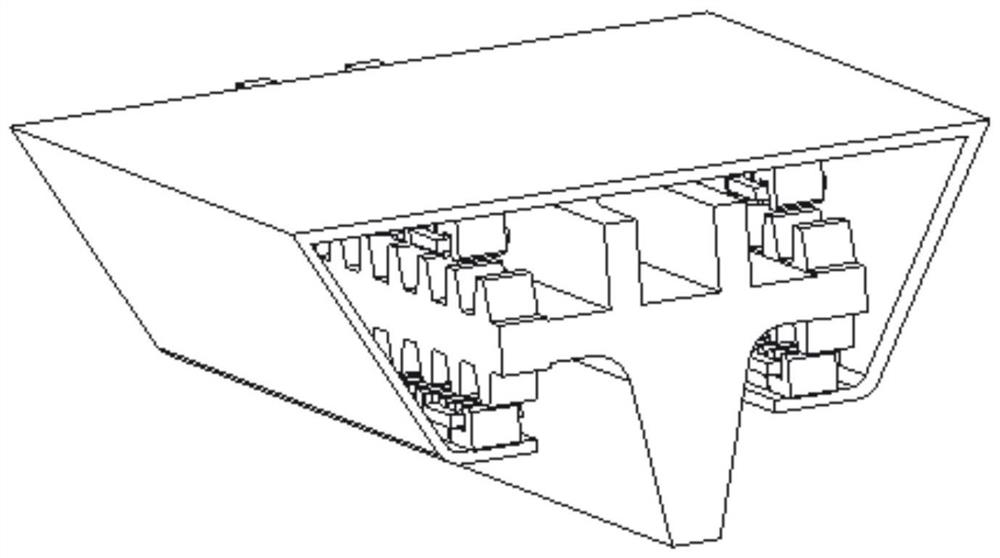
图1为本发明实施例提供的双边磁通切换型磁悬浮永磁直线同步电动机的三维结构示意图;
图2为本发明实施例提供的双边磁通切换型磁悬浮永磁直线同步电动机的正面图;
图3为本发明实施例提供的双边磁通切换型磁悬浮永磁直线同步电动机O-O剖视图;
图4为本发明实施例提供的双边磁通切换型磁悬浮永磁直线同步电动机控制系统的原理示意图。
图中:1-1、上组双边长次级;1-2、下组双边长次级;2-1、上初级模块;2-2、下初级模块;2-3、初级模块;2-4、U型导磁材料;3、电枢绕组;4、永磁体;5、非导磁材料;6、气隙;7、长次级支撑体;8、支撑壳体;9、滑道。
具体实施方式
下面结合附图和实施例,对本发明的具体实施方式作进一步详细描述。以下实施例用于说明本发明,但不用来限制本发明的范围。
本实施例提供一种针对轨道交通等长定子直线电机应用场合的双边磁通切换型磁悬浮永磁直线同步电动机,包括长次级支撑体7、支撑壳体8、上初级模块2-1和下初级模块2-2。上初级模块2-1和下初级模块2-2均对称设有左右两个,左右两个上初级模块2-1连接在支撑壳体8的内上部,左右两个下初级模块2-2设置在支撑壳体8的内下部,两个上初级模块2-1与两个下初级模块2-2上下对称。
上初级模块2-1和下初级模块2-2的组成结构完全一致,在外部用支撑壳体8连接,同时同向运动。上初级模块2-1包括m个或者2m个初级模块2-3,m为电机的相数。初级模块2-3包括两个U型导磁材料2-4和设置在两个U型导磁材料2-4之间的永磁体4,不同初级模块2-3的永磁体4交替平行充磁。初级模块2-3还包括电枢绕组3,所述电枢绕组3设置在初级模块2-3的槽中且套住永磁体4。
长次级支撑体7的左右两端设置有双边长次级,所述双边长次级包括上组双边长次级1-1和下组双边长次级1-2,上、下两组双边长次级均包括左右两个长次级;上组双边长次级1-1的位置对应上初级模块2-1,下组双边长次级1-2的位置对应下初级模块2-2,上组双边长次级1-1与上初级模块2-1之间、下组双边长次级1-2与下初级模块2-2之间均设有气隙6。
相邻初级模块2-3之间填充非导磁材料5。同一相的两个初级模块2-3的距离为λ
一种针对轨道交通等长定子直线电机应用场合的双边磁通切换型磁悬浮永磁直线同步电动机的控制方法,包括电机速度控制方法和悬浮控制方法两部分。
在电机运行时,由上初级模块2-1提供电磁推力,下初级模块2-2提供悬浮力。稳定运行时,通过位置速度传感器测量上初级模块2-1的速度和位置的变化,推力系统上初级模块2-1采用i
电机速度控制方法中,包括以下步骤:
步骤一:根据位置速度传感器测量初级(2-1)的速度v和位置θ的变化,测量实际的两相电流i
步骤二:根据输出的三相电流i
步骤三:给定速度v
步骤四:根据在两相同步旋转坐标系下的输入电压值u
步骤五:根据在两相静止坐标系下的电压值u
悬浮控制方法中,包括以下步骤:
步骤一:根据重力加速度传感器测量实际下初级模块2-2的重力G的变化,测量实际的两相电流i
步骤二:由于采用的错齿结构,下初级模块2-2的位置θ
步骤三:根据输出的三相电流i
步骤四:根据实验测出下初级模块2-2的重力G与电流的关系,得出d轴给定电流
步骤五:根据在两相同步旋转坐标系下的输入电压值u
步骤六:根据在两相静止坐标系下的电压值u
如图1和图2所示,一个长次级支撑体7不仅支撑着两个相同的长次级铁心1-1和1-2,还有滑道9。一个支撑壳体8连接两个相同的双边磁通切换型磁悬浮永磁直线同步电动机的四个初级铁心2-1和2-2。本实施例通过合理的控制通入两个电枢绕组3中的电流励磁分量i
如图3所示,为图2中双边磁通切换型磁悬浮永磁直线同步电动机的O-O剖视图。图中上初级模块2-1包括6个初级模块2-3,电机的相数为3。同一相的两个初级模块2-3的距离为λ
图4为双边磁通切换型磁悬浮永磁直线同步电动机控制系统的原理示意图。稳定运行时,根据位置速度传感器测量上初级模块2-1的速度v和位置θ,并且测量实际的两相电流i
最后应说明的是:以上各实施例仅用以说明本发明的技术方案,而非对其限制;尽管参照前述各实施例对本发明进行了详细的说明,本领域的普通技术人员应当理解:其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分或者全部技术特征进行等同替换;而这些修改或者替换,并不使相应技术方案的本质脱离本发明权利要求所限定的范围。
- 双边磁通切换型磁悬浮永磁直线同步电动机及其控制方法
- 一种磁通切换型磁悬浮永磁直线同步电机及其控制方法