机器人控制电路和安防机器人
文献发布时间:2023-06-19 11:57:35
技术领域
本申请涉及机器人技术领域,特别是涉及一种机器人控制电路和安防机器人。
背景技术
伴随着我国社会经济稳步增长,越来越多的巨型企业厂区、高新园区、巨型商场不断的出现在国民生活中,随着巡检范围不断扩大,室内外混合环境,用人成本的攀升等因素,仅仅依靠安保人员己经不能满足目前的安保需求。而随着科技的发展,机器人在安防领域扮演着越来越重要的角色。
在实现过程中,发明人发现传统技术中至少存在如下问题:传统机器人存在功能不完善,反应不及时、性能差等问题。
发明内容
基于此,有必要针对上述技术问题,提供一种能够提高性能的机器人控制电路和安防机器人。
为了实现上述目的,一方面,本发明实施例提供了一种机器人控制电路,包括设于机器人本体内的功能控制板;
功能控制板上设有图像处理模组,以及配合图像处理模组的算力单元;图像处理模组用于连接设于机器人本体上的安防设备;
图像处理模组包括图像处理单元和音频处理单元;图像处理单元分别与算力单元、音频处理单元相连;
其中,音频处理单元处理安防设备传输的音频数据,输出音频信息;图像处理单元接收及处理安防设备传输的图像数据;算力单元处理经图像处理单元传输的图像数据,输出图像信息;
图像处理单元基于图像信息和音频信息,输出安防数据;安防数据用于指示机器人输出相应的控制命令以控制动作机构的动作。
在其中一个实施例中,功能控制板上还设有探测器处理单元;
探测器处理单元用于连接设于机器人本体上的探测器;
探测器处理单元处理探测器传输的探测数据,输出探测信息;探测信息用于指示机器人输出相应的控制命令以控制动作机构的动作。
在其中一个实施例中,探测器处理单元为超声波处理单元;功能控制板上还设有超声波数据输入连接座和超声波数据输出连接座;
超声波处理单元通过超声波数据输入连接座,连接位于靠近机器人机身顶部的位置、设于机身侧面且围绕机身布置的多个超声波探测器;
超声波处理单元通过超声波数据输出连接座输出超声波数据处理信息。
在其中一个实施例中,功能控制板上设有LAN输入接口座;
LAN输入接口座用于连接位于机器人机身的中部、设于机身侧面且围绕机身布置的多个摄像头;
图像处理单元通过LAN数据线连接LAN输入接口座。
在其中一个实施例中,还包括千兆交换机和PHY芯片;
千兆交换机的一端连接LAN输入接口座,另一端通过LAN数据线连接PHY芯片的一端;PHY芯片的另一端连接图像处理单元。
在其中一个实施例中,音频处理单元包括放大器和数字音频处理器;
数字音频处理器的一端连接图像处理单元,另一端连接放大器;放大器用于连接设于机身侧面的麦克风。
在其中一个实施例中,安防数据包括视频数据、图像识别结果和/或图像识别控制信息;
功能控制板上还设有LAN输出接口座;
图像处理单元通过LAN输出接口座输出安防数据;安防数据用于指示机器人进行数据备份和/或控制动作机构的动作。
在其中一个实施例中,还包括连接在图像处理单元和LAN输出接口组之间的PHY芯片。
在其中一个实施例中,功能控制板上还设有连接图像处理单元、用于数据备份的存储设备;功能控制板上还设有连接图像处理单元的微控制单元。
一种安防机器人,安防机器人包括机身、底盘以及用于连接机身和底盘的连接座;
连接座包括基座和设于基座底部的若干支撑腿;基座与机身连接,支撑腿与底盘连接;底盘与支撑腿连接处设置有穿线孔,支撑腿内部设置有分别连通穿线孔和机身内部的走线通道;
安防机器人还包括上述的机器人控制电路。
上述技术方案中的一个技术方案具有如下优点和有益效果:
本申请包括设于机器人本体内的功能控制板,该功能控制板上设有图像处理模组,以及配合图像处理模组的算力单元;图像处理模组用于连接设于机器人本体上的安防设备;其中,图像处理模组包括图像处理单元和音频处理单元;图像处理单元分别与算力单元、音频处理单元相连;进而,本申请完善了机器人中图像信息及音频信息的处理能力,可以高效输出精准的安防数据,该安防数据能够用于指示机器人控制相应动作机构的动作,实现快速响应。本申请能够完善安防机器人的功能,大大提高安防数据的处理输出效率,提高性能。
附图说明
为了更清楚地说明本申请实施例或传统技术中的技术方案,下面将对实施例或传统技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本申请的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
图1为一个实施例中机器人控制电路的应用环境图;
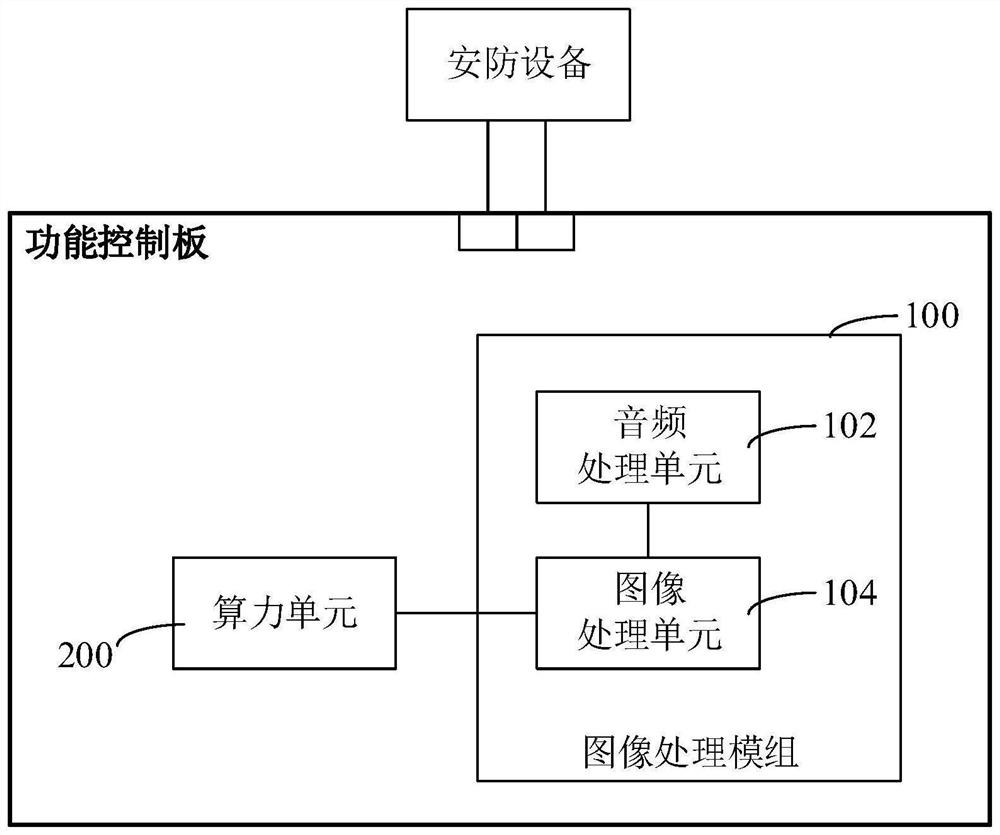
图2为一个实施例中机器人控制电路的结构框图;
图3为一个实施例中机器人控制电路的结构示意图;
图4为另一个实施例中机器人控制电路的结构框图;
图5为一个实施例中机器人控制电路的内部结构示意图。
具体实施方式
为了便于理解本申请,下面将参照相关附图对本申请进行更全面的描述。附图中给出了本申请的实施例。但是,本申请可以以许多不同的形式来实现,并不限于本文所描述的实施例。相反地,提供这些实施例的目的是使本申请的公开内容更加透彻全面。
除非另有定义,本文所使用的所有的技术和科学术语与属于本申请的技术领域的技术人员通常理解的含义相同。本文中在本申请的说明书中所使用的术语只是为了描述具体的实施例的目的,不是旨在于限制本申请。
可以理解,本申请所使用的术语“第一”、“第二”等可在本文中用于描述各种元件,但这些元件不受这些术语限制。这些术语仅用于将第一个元件与另一个元件区分。
空间关系术语例如“在...下”、“在...下面”、“下面的”、“在...之下”、“在...之上”、“上面的”等,在这里可以用于描述图中所示的一个元件或特征与其它元件或特征的关系。应当明白,除了图中所示的取向以外,空间关系术语还包括使用和操作中的器件的不同取向。例如,如果附图中的器件翻转,描述为“在其它元件下面”或“在其之下”或“在其下”元件或特征将取向为在其它元件或特征“上”。因此,示例性术语“在...下面”和“在...下”可包括上和下两个取向。此外,器件也可以包括另外地取向(譬如,旋转90度或其它取向),并且在此使用的空间描述语相应地被解释。
需要说明的是,当一个元件被认为是“连接”另一个元件时,它可以是直接连接到另一个元件,或者通过居中元件连接另一个元件。此外,以下实施例中的“连接”,如果被连接的对象之间具有电信号或数据的传递,则应理解为“电连接”、“通信连接”等。
在此使用时,单数形式的“一”、“一个”和“所述/该”也可以包括复数形式,除非上下文清楚指出另外的方式。还应当理解的是,术语“包括/包含”或“具有”等指定所陈述的特征、整体、步骤、操作、组件、部分或它们的组合的存在,但是不排除存在或添加一个或更多个其他特征、整体、步骤、操作、组件、部分或它们的组合的可能性。同时,在本说明书中使用的术语“和/或”包括相关所列项目的任何及所有组合。
为了使本申请的目的、技术方案及优点更加清楚明白,以下结合附图及实施例,对本申请进行进一步详细说明。应当理解,此处描述的具体实施例仅仅用以解释本申请,并不用于限定本申请。
本申请提供的机器人控制电路,可以应用于如图1所示的应用环境中。其中,机器人可以包括机身20、设置于机身20底部的连接座40、设置在连接座40下方的底盘30;连接座40包括基座41和设置在基座41底部的若干支撑腿42,基座41与机身20连接,支撑腿42与底盘30连接;
其中,底盘30与支撑腿42连接处设置有穿线孔31,支撑腿42内部设置有分别连通穿线孔和机身20内部的走线通道;走线通道可供从机身20到底盘30的电线等走线。另外,需要说明的是,支撑腿42可以是部分或全部设置有走线通道。
进一步的,该机器人本体上设有安防设备;安防设备可以包括探测器(例如,超声波探测器)、摄像头(例如,星光相机)、激光雷达和拾音器(例如,麦克风)等。安防设备可以是上述一种设备或多种设备的组合。该机器人可以应用于安防领域,作为一种安防机器人予以使用。
此外,该机器人还可以与外部设备,例如云端服务器和/或终端,进行交互。上述终端可以但不限于是各种个人计算机、笔记本电脑、智能手机、平板电脑和便携式可穿戴设备,上述服务器可以用独立的服务器或者是多个服务器组成的服务器集群来实现。
在一个实施例中,如图2所示,提供了一种机器人控制电路,以该电路应用于图1中的机器人为例进行说明,包括设于机器人本体内的功能控制板;
该功能控制板上设有图像处理模组100,以及配合图像处理模组100的算力单元200;图像处理模组100用于连接设于机器人本体上的安防设备;
图像处理模组100可以包括音频处理单元102和图像处理单元104;图像处理单元104分别与算力单元200、音频处理单元102相连;
其中,音频处理单元102处理安防设备传输的音频数据,输出音频信息;图像处理单元104接收及处理安防设备传输的图像数据;算力单元200处理经图像处理单元104传输的图像数据,输出图像信息;
图像处理单元104基于图像信息和音频信息,输出安防数据;安防数据用于指示机器人输出相应的控制命令以控制动作机构的动作。
具体而言,本申请提供了一种可独立设置于机器人本体内的功能控制板,进而可提高机器人的多功能适配性。该功能控制板可设于机器人本体内,例如,机器人本体的箱体内设置有功能控制板;在一个示例中,功能控制板可位于机身20内设置的容纳腔中,以便与机器人本体上的安防设备连接及交互,也可与机器人中相应的控制模组和/或动作机构进行连接交互。
进一步的,该功能控制板可以采用DC-DC进行供电,例如,由机器人底盘相应的供电机构进行供电。
在其他示例中,功能控制板可以通过路由将安防数据实时传输给机器人的控制模组,也可以对安防数据进行备份后传输。上述安防数据可以用于导航、动作机构控制及示警等。例如,功能控制板所发送的安防数据包中,可标记有数据类型、接收对象(例如云端服务器、导航处理单元或外部设备标识),进而由路由根据该标记的接收对象发送给相应的元件或外部设备。
进一步的,如图2所示,该功能控制板上可设有图像处理模组100,以及配合图像处理模组的算力单元200;图像处理模组100可用于连接设于机器人本体上的安防设备。其中,算力单元200配合图像处理模组100,可以指对图像处理模组100接收到的安防设备传输的图像数据进行图像识别等处理,进而提高图像处理效率,改善机器人响应速度。
本申请该图像处理模组100可以包括音频处理单元102和图像处理单元104;图像处理单元104分别与算力单元200、音频处理单元102相连;其中,音频处理单元102可以处理安防设备传输的音频数据;而图像处理单元104可以接收及处理安防设备传输的图像数据,并将图像数据传输给算力单元200进行处理,以输出图像信息。进而,图像处理单元104可以基于图像信息和音频信息,输出安防数据。
安防设备传输的音频数据可以由音频处理单元处理后,输出给图像处理单元。在一个示例中,安防数据可以包括视频数据、图像识别结果和/或图像识别控制信息;具体地,本申请安防数据可以用于指示机器人输出相应的控制命令以控制动作机构的动作。该安防数据可以为图像处理单元输出的视频数据和/或图像数据,也可以是算力单元输出的图像识别结果。本申请能够显著提高机器人功能单元的适配性。
以安防设备为摄像头为例,图像处理单元获得摄像头的图像,图像处理单元可以将该图像发送给算力单元,该算力单元对该图像进行图像识别处理,获得图像识别结果,返回该图像识别结果给图像处理单元,图像处理单元根据该图像识别结果发送图像识别控制信息(亦可以是图像识别结果本身)给机器人控制模组,由控制模组根据图像识别控制信息执行相应的控制。
其中,也可由图像处理单元根据该图像识别结果发送图像识别控制信息(亦可以是图像识别结果本身)给路由单元,路由单元将该图像识别控制信息发送给机器人控制模组,由控制模组根据图像识别控制信息执行相应的控制。其中,该机器人控制模组可以为机器人底盘控制器。
此外,图像处理单元可以接收并处理安防设备(例如,多路相机)的图像信号,如进行图像解码,之后调用算力单元(例如,算力芯片)资源进行智能检测,判断相机拍摄到的照片有没有人体、车辆等。
本申请中的算力单元可以采用相应的算力芯片予以实现,例如RK1808。图像处理单元可以采用相应的图像处理SoC(System on Chip,片上系统)予以实现,例如RK3399。进一步的,图像处理单元可以通过USB(Universal Serial Bus,通用串行总线)连接算力单元,例如USB3.0。而图像处理单元可以通过USB连接音频处理单元,例如USB2.0。在一些实施例中,音频处理单元可以采用放大器和数字音频处理器予以实现,例如AMP(Amplifier,放大器)和DSP(Digital Signal Processing,数字音频处理器)。
在其中一个实施例中,音频处理单元可以包括放大器和数字音频处理器;
数字音频处理器的一端连接图像处理单元,另一端连接放大器;放大器用于连接设于机身侧面的麦克风。
具体而言,如图3所示,放大器AMP的一端连接麦克风,以获取音频数据。放大器AMP的另一端连接DSP,进而由DSP将音频数据传输给图像处理单元进行处理。本申请音频处理过程可以包括:麦克风→音频处理单元→图像处理单元→LAN输出连接座→机器人外部底盘。
本申请的音频处理单元能够处理声学缺陷,该音频处理单元可以将多通道输入的模拟信号转化为数字信号,进而对数字信号进行一系列可调谐的算法处理,满足改善音质、矩阵混音、消噪、消回音、消反馈等应用需求,最后可以通过数模转换输出多通道的模拟信号。
在其中一个实施例中,如图3所示,功能控制板上设有LAN(Local Area Network,局域网)输入接口座;
LAN输入接口座用于连接位于机器人机身的中部、设于机身侧面且围绕机身布置的多个摄像头;
图像处理单元通过LAN数据线连接LAN输入接口座。
具体而言,安防设备可以是位于机器人机身的中部、设于机身侧面且围绕机身布置的多个摄像头,其中,各摄像头可以位于机身的中部;在一个示例中,摄像头可以采用星光相机予以实现。进一步的,机身上设置有3个摄像头,均匀设置在机身侧面,摄像头的拍摄角度大于等于120°。
如图3所示,本申请图像处理单元可以通过LAN输入接口座连接各摄像头,提高数据传输效率且优化数据。
在其中一个实施例中,如图3所示,还可以包括千兆交换机和PHY(PhysicalLayer,端口物理层)芯片;
千兆交换机的一端连接LAN输入接口座,另一端通过LAN数据线连接PHY芯片的一端;PHY芯片的另一端连接图像处理单元。
具体而言,如图3所示,千兆SW(即千兆交换机)的一端连接LAN输入接口座,另一端通过LAN数据线连接PHY芯片的一端,而PHY芯片的另一端连接图像处理单元。其中,PHY芯片与图像处理单元之间的数据链路可以采用GMAC(Gigabit Media Access Control,千兆网媒体访问控制)。
本申请千兆SW可以采用常规交换机予以实现,可以用于扩展网口;通过该千兆SW,使得本申请中只有一个网口的图像处理SOC,能够匹配3~4个摄像头(例如,星光相机)。
在其中一个实施例中,功能控制板上还设有LAN输出接口座;
图像处理单元通过LAN输出接口座输出安防数据;安防数据用于指示机器人进行数据备份和/或控制动作机构的动作。
具体而言,安防数据可以包括视频数据、图像识别结果和/或图像识别控制信息;功能控制板可以通过LAN输出接口座输出安防数据等信息。机器人可以对该安防数据进行数据备份,或者过LAN输出接口座输出安防数据由路由传输给其它外部设备。
其中,图像处理单元连接LAN输出连接座→外部底盘;而图像(视频)处理过程可以包括:图像(视频)→图像处理单元→算力单元→图像处理单元→LAN输出连接座→外部底盘。
在其中一个实施例中,还包括连接在图像处理单元和LAN输出接口组之间的PHY芯片。
具体而言,如图3所示,图像处理单元和LAN输出接口组之间还连接有PHY芯片。该PHY芯片与图像处理单元之间可以采用PCIE(peripheral component interconnectexpress,高速串行计算机扩展总线标准)进行通信,实现高速串行点对点双通道高带宽传输,进而能够支持主动电源管理,错误报告,端对端的可靠性传输,热插拔以及服务质量(QOS,Quality of Service)等功能。
在其中一个实施例中,功能控制板上还设有连接图像处理单元、用于数据备份的存储设备。
具体地,存储设备可以采用硬盘予以实现,如图3所示,该硬盘连接图像处理单元。本申请中音视频、图像备份过程可以包括:图像(视频)、音频→图像处理单元→硬盘/或通过LAN输出连接座发送外部底盘上的路由。
功能控制板,所述功能控制板上设置有图像处理单元、音频处理单元(图中的AMP和DSP)、超声波处理单元、算力单元及硬盘、LAN输入接口座、LAN输出接口座、数据输出连接座、超声波数据输入连接座、超声波数据输出连接座。
以上,本申请中的图像处理单元分别与音频处理单元(图3中的AMP和DSP)、算力单元及硬盘连接,该图像处理单元通过LAN数据线连接LAN输入接口座,该LAN输入接口座连接安防设备。本申请完善了机器人中图像信息及音频信息的处理能力,可以高效输出精准的安防数据,该安防数据能够用于指示机器人控制相应动作机构的动作,实现快速响应。本申请能够完善安防机器人的功能,大大提高安防数据的处理输出效率,提高性能。
在一个实施例中,如图4所示,提供了一种机器人控制电路,以该电路应用于图1中的机器人为例进行说明,包括设于机器人本体内的功能控制板;
功能控制板上设有图像处理模组,以及配合图像处理模组的算力单元;图像处理模组用于连接设于机器人本体上的安防设备;图像处理模组包括图像处理单元和音频处理单元;图像处理单元分别与算力单元、音频处理单元相连;功能控制板上还设有探测器处理单元;探测器处理单元用于连接设于机器人本体上的探测器;
其中,音频处理单元处理安防设备传输的音频数据,输出音频信息;图像处理单元接收及处理安防设备传输的图像数据;算力单元处理经图像处理单元传输的图像数据,输出图像信息;图像处理单元基于图像信息和音频信息,输出安防数据;安防数据用于指示机器人输出相应的控制命令以控制动作机构的动作。而探测器处理单元可以处理探测器传输的探测数据,输出探测信息;探测信息用于指示机器人输出相应的控制命令以控制动作机构的动作。
具体而言,机器人本体上设置有至少一个摄像头、探测器等;本体内设置有功能控制板,该功能控制板上设置有图像处理单元、音频处理单元、探测器处理单元以及算力单元。本申请的功能控制板能够集成探测器处理和图像处理等功能,提高了机器人的功能适配性及处理能力,实现了功能模块化。进一步的,功能控制板可以独立处理位于机身上的各探测器和/或摄像头等安防设备的数据,拓展机器人监测范围的同时提高机器人的处理效率。
在其中一个实施例中,探测器处理单元可以为超声波处理单元;功能控制板上还设有超声波数据输入连接座和超声波数据输出连接座;
超声波处理单元通过超声波数据输入连接座,连接位于靠近机器人机身顶部的位置、设于机身侧面且围绕机身布置的多个超声波探测器;
超声波处理单元通过超声波数据输出连接座输出超声波数据处理信息。
具体而言,机身侧面设置有多个围绕机身布置的探测器,进一步的,探测器可以位于靠近机身顶部的位置;在一些实施例中,探测器可以为超声波探测器。当然,根据需要也可选择其它合适的探测器,例如微波探测器等。
进一步的,超声波处理单元通过超声波数据输入连接座连接各超声波探测器,并可通过超声波数据输出连接座输出超声波数据处理信息。基于本申请的超声波数据处理过程可以包括:超声波探测单元→该超声波数据输入连接座→超声波处理单元→超声波数据输出连接座→外部底盘。
其中,超声波探测单元可以通过RS485连接超声波数据输出连接座。
此外,如图5所示,在其中一个实施例中,功能控制板上还设有连接图像处理单元的微控制单元。
具体而言,图像处理单元还可以与MCU(Microcontroller Unit,微控制单元)相连,该MCU可以采用STM32嵌入式单片机予以实现。进一步的,图像处理单元与MCU之间可以基于UART(Universal Asynchronous Receiver/Transmitter,通用异步收发传输器)进行通信。同时,本申请功能控制板可以采用DC 48V进行供电,并且功能控制板可以通过RS485连接路由。
本申请中的MCU可以实现电源管理功能,比如待机时,只保留MCU工作,可以降低功耗;开机时,再由MCU去打开其他模块供电;进一步的,本申请中的MCU功能单一,对比图像处理SOC(例如,RK3399),稳定度高,当RK3399异常时,可用MCU去复位重启。此外,本申请提出采用STM32实现MCU的相关功能,即本申请中的MCU可以支持的温度范围高,一般为-40~85℃;需要说明的是,ARM芯片常用的规格是0~60℃或-20~60℃,在中国北方户外冬天可达到-40℃,此时,可用本申请中的MCU驱动加热模块,使整体热起来后,再启动ARM芯片。
需要说明的是,本实施例中,图像处理、音频处理等具体流程和涉及的相关器件,以及具体的实现过程,可以参阅前文各实施例,此处不再赘述。
为了进一步阐释本申请方案,下面结合一个具体示例予以说明,如图5所示,提供了一种机器人控制电路,以该电路应用于图1中的机器人为例进行说明,机器人本体上设置有至少一个摄像头、超声波探测单元;
本体内设置有功能控制板,该功能控制板上设置有图像处理单元、音频处理单元(图中的AMP和DSP)、超声波处理单元、算力单元及硬盘、LAN输入接口座、LAN输出接口座、超声波数据输入连接座以及超声波数据输出连接座。
该图像处理单元可以与音频处理单元、算力单元及硬盘连接,该图像处理单元通过LAN数据线连接LAN输入接口座,该LAN输入接口座连接上述摄像头连接。图像处理单元可以通过LAN输出连接座连接外部底盘。
进一步的,超声波数据处理流程可以包括:超声波探测单元→该超声波数据输入连接座→超声波处理单元→超声波数据输出连接座→外部底盘。
图像(视频)处理过程可以包括:图像(视频)→图像处理单元→算力单元→图像处理单元→LAN输出连接座→外部底盘;音频处理过程可以包括:麦克风→音频处理单元→图像处理单元→LAN输出连接座→外部底盘;音视频、图像备份过程可以包括:图像(视频)、音频→图像处理单元→硬盘/或通过LAN输出连接座发送外部底盘上的路由。
图像处理单元所发送的图像数据包中标记有数据类型、接收对象(例如云端服务器、导航处理单元或外部设备标识),该路由单元根据该标记的接收对象发送给相应的元件或外部设备。
进一步的,图像处理单元所发送的图像数据包,可以指示路由单元可以将图像(视频)数据及或图像识别结果(例如障碍物的方位、距离、形状大小等)发送给导航处理单元,进而使得导航处理单元可以根据预先存储的激光点云地图、激光雷达数据、图像(视频)数据及或图像识别结果生成运动控制信息,发送给运动控制信息给机器人相应的主控制单元,该主控制单元可以根据该运动控制信息控制电机模组的运动。
本申请完善了机器人中图像信息及音频信息的处理能力,可以高效输出精准的安防数据,该安防数据能够用于指示机器人控制相应动作机构的动作,实现快速响应。本申请能够完善安防机器人的功能,大大提高安防数据的处理输出效率,提高性能。
应该理解的是,虽然上述的流程中的各个步骤按照箭头的指示依次显示,但是这些步骤并不是必然按照箭头指示的顺序依次执行。除非本文中有明确的说明,这些步骤的执行并没有严格的顺序限制,这些步骤可以以其它的顺序执行。而且,上述流程的至少一部分步骤可以包括多个子步骤或者多个阶段,这些子步骤或者阶段并不必然是在同一时刻执行完成,而是可以在不同的时刻执行,这些子步骤或者阶段的执行顺序也不必然是依次进行,而是可以与其它步骤或者其它步骤的子步骤或者阶段的至少一部分轮流或者交替地执行。
在一个实施例中,提供了一种安防机器人,该安防机器人可以包括机身、底盘以及用于连接机身和底盘的连接座;
连接座包括基座和设于基座底部的若干支撑腿;基座与机身连接,支撑腿与底盘连接;底盘与支撑腿连接处设置有穿线孔,支撑腿内部设置有分别连通穿线孔和机身内部的走线通道;
安防机器人还包括上述的机器人控制电路。
本领域技术人员可以理解,图1至图5中示出的结构,仅仅是与本申请方案相关的部分结构的框图,并不构成对本申请方案所应用于其上的设备和元器件的限定,具体的设备可以包括比图中所示更多或更少的部件,或者组合某些部件,或者具有不同的部件布置。
在本说明书的描述中,参考术语“有些实施例”、“其他实施例”、“理想实施例”等的描述意指结合该实施例或示例描述的具体特征、结构、材料或者特征包含于本发明的至少一个实施例或示例中。在本说明书中,对上述术语的示意性描述不一定指的是相同的实施例或示例。
以上实施例的各技术特征可以进行任意的组合,为使描述简洁,未对上述实施例中的各个技术特征所有可能的组合都进行描述,然而,只要这些技术特征的组合不存在矛盾,都应当认为是本说明书记载的范围。
以上所述实施例仅表达了本申请的几种实施方式,其描述较为具体和详细,但并不能因此而理解为对发明专利范围的限制。应当指出的是,对于本领域的普通技术人员来说,在不脱离本申请构思的前提下,还可以做出若干变形和改进,这些都属于本申请的保护范围。因此,本申请专利的保护范围应以所附权利要求为准。
- 机器人控制电路和安防机器人
- 一种安防机器人主控制电路系统