一种三自由度杆件搬运机械臂
文献发布时间:2023-06-19 11:59:12
技术领域
本发明涉及机器人自动化领域,更具体地,涉及一种三自由度杆件搬运机械臂。
背景技术
随着自动化技术的发展,用于货物搬运的机械臂被广泛运用,使得工作效率是传统人工工作的数十倍,如物流仓库大型货架上货物的取放,其搬运过程仅需3个自由度动作就可以实现。由于其为串联机构,自由度少,运动形式简单并且容易制造与控制,小型的3自由度机械臂在工程上也得到较多的应用,但目前的小型3自由度串联机械臂使用较多的是丝杠导轨机构,或电机随机构一起运动带动机构实现平移伸缩,例如中国专利CN106743577B公开了一种三自由度机械臂装置及机械手平台系统,采用双丝杆机构,使得其运动部分占用较大的空间、重量大、运动灵活性较低;由于上述不足使得其难以运用到移动性和体积大小要求较高的设备上,如小型深管钻探设备中钻杆搬运系统、空间站货仓储系统等,因此,需要一个具有多自由度的钻杆搬运机构来实现钻杆的高效搬运。
发明内容
本发明为克服上述背景技术所述的目前的小型3自由度串联机械臂使用较多的是丝杠导轨机构,或电机随机构一起运动带动机构实现平移伸缩,使得其运动部分占用较大的空间、重量大、运动灵活性较低;由于上述不足使得其难以运用到移动性和体积大小要求较高的设备上的问题,提供一种三自由度杆件搬运机械臂。本发明占用空间更小,运动灵活性更高,适合装配在移动性和体积大小要求较高的设备上。
为解决上述技术问题,本发明采用的技术方案是:一种三自由度杆件搬运机械臂,包括机架以及位于所述机架上的:
夹持机构,用于夹持或者松开待搬运的杆件;
平动机构,用于带动所述夹持机构沿水平方向移动;
转动机构,用于同时带动所述平动机构和夹持机构绕竖直轴线转动;
所述夹持机构安装在所述平动机构上,所述平动机构安装在所述转动机构上,所述转动机构通过设有的转动轴与所述机架转动连接。
进一步的,所述转动机构包括转动架和转动电机,所述转动轴连接在转动架的两端,所述机架在于所述转动轴对应的位置分别设有与所述转动轴匹配的接触轴承,所述转动轴与对应一端的接触轴承转动连接,所述转动电机的机座安装在所述机架的底部或顶部,所述转动电机的输出轴与任意一根转动轴背对所述转动架的一端固定连接且与转动轴位于同一竖直轴线上。
进一步的,所述平动机构包括导轨座、导轨、平动电机和移动平台,所述导轨座安装在所述转动架的中部,所述导轨位于所述导轨座的一侧,所述移动平台滑动连接在所述导轨上,所述夹持机构安装在所述移动平台上,所述平动电机的机座安装在所述导轨座的另一侧,所述导轨座的两端均设有平动导向滑轮,所述平动电机的输出轴固定连接有平动集线轮,所述平动集线轮上绕设有平动绳索,所述平动绳索的两头分别从相反的方向跨过对应一端的平动导向滑轮后从相对的方向固定连接在所述移动平台上,所述导轨所在直线与所述转动轴所在直线和所述平动电机的输出轴所在直线均垂直。
进一步的,所述导轨为光轴导轨。
进一步的,所述夹持机构包括设于所述移动平台上的夹持驱动电机、夹爪驱动绳索、压线滑轮、夹爪导向滑轮、夹爪末端绳索导向滑轮和夹爪,所述夹持驱动电机的机座安装在所述移动平台上,所述夹爪位于所述移动平台远离所述导轨座的一侧,所述夹爪驱动绳索一端连接所述夹持驱动电机的输出轴、另一端依次跨过所述压线滑轮、夹持导向滑轮和夹爪末端绳索导向滑轮与所述夹爪连接。
进一步的,所述夹爪数量为2个,2个夹爪分别位于所述移动平台远离所述导轨座一侧的两端设有的夹座上。
进一步的,所述夹爪包括2块用于形成夹持口的夹片,所述夹片的一端与所述夹座转动连接,夹片的与所述夹座转动连接一端各自连接有1根夹爪驱动绳索,所述夹座与所述夹片的连接位置还设有安装槽,所述安装槽安装有用于使夹紧后的夹片复位的扭簧,所述扭簧的第一扭臂卡接在所述夹座中、第二扭臂与所述夹片连接。
进一步的,所述夹持驱动电机的输出轴上设有夹持集线轮,所述夹持集线轮上设有4道集线槽,每道集线槽分别绕设有1根所述夹爪驱动绳索,4根夹爪驱动绳索同时跨在所述压线滑轮后分别通过1个导向滑轮与对应的夹片连接。
进一步的,所述压线滑轮为阶梯滑轮。
进一步的,所述夹爪中2块夹片相对的一侧设有防滑纹。
与现有技术相比,有益效果是:
1、本发明中夹爪机构安装在平动机构上,平动机构安装在转动机构上,转动机构安装在机架上,各个机构根据相应功能进行层次布置,布局更加合理,占用空间更小,运动灵活性更高,适合装配在移动性和体积大小要求较高的设备上。
2、本发明利用绳索传动控制夹爪实现夹紧动作,夹爪的张开由夹爪弹簧提供恢复力,有效减少了刚性传动件带来的空间占用大、重量大的问题,夹爪驱动电机布置在远离夹爪端的移动平台上可以减少夹爪对移动平台带来的扭转力矩;并且利用绳索传动实现对导轨滑块的驱动,驱动移动平台运动,相对于使用丝杠或齿轮传动,其结构更紧凑小巧;此外,绳索传动缓冲性好,容易维护,对硬件设备的损耗更小。
附图说明
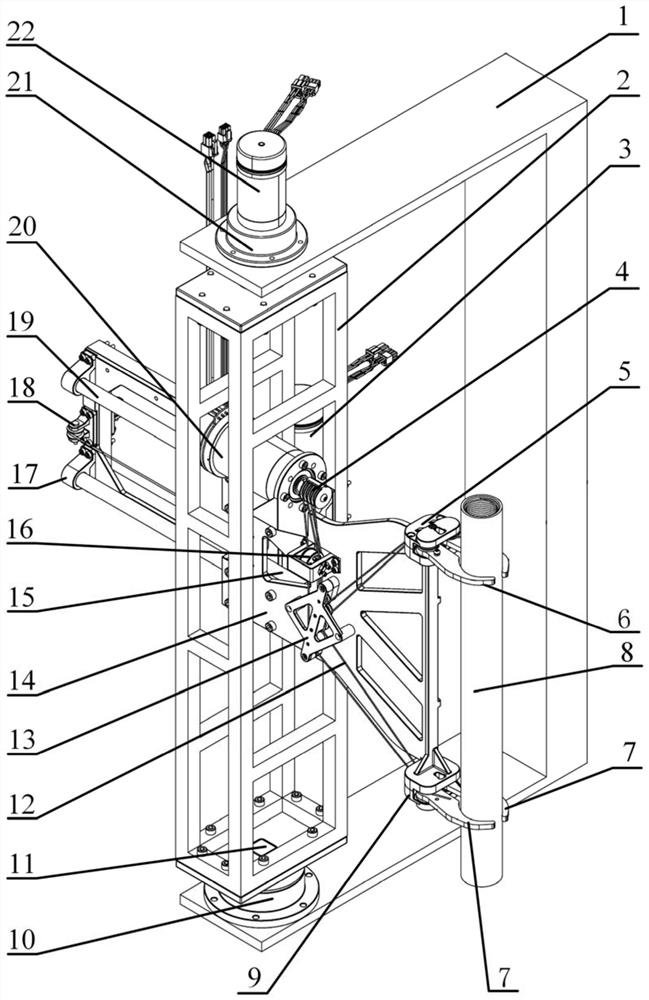
图1是本发明的结构示意图。
图2是本发明中平动电机一侧的结构示意图。
图3是本发明的纵切示意图。
图4是本发明中夹持机构的结构示意图。
图5是本发明中夹片处的结构示意图。
图6是本发明中的平动机构在平动电机一侧的结构示意图。
图7是本发明中的平动机构在导轨一侧的结构示意图。
附图标记说明:1、机架;2、转动架;3、平动电机;4、夹爪绳索集线轮;5、夹爪上轴承盖;6、夹爪;7、夹片;8、杆件;9、夹爪下轴承盖;10、转动架下轴承座;11、下转动轴;12、夹爪驱动绳索;13、夹爪绳索导向滑轮组;14、移动平台;15、直线轴承;16、压线滑轮;17、导轨座;18、平动导向滑轮;19、导轨;20、夹爪驱动电机;21、转动架上轴承座;22、转动电机;23、移动平台绳索固定端口;24、平动集线轮;25、平动绳索;26、夹爪导向滑轮;27、夹爪末端绳索导向滑轮;28、夹爪末端角接触轴承;29、扭簧;30、夹爪绳索固定螺钉;31、转动架上角接触轴承;32、转动架上转动轴;33、转动架推力球轴承;34、转动架下角接触轴承;35、夹座。
具体实施方式
附图仅用于示例性说明,不能理解为对本专利的限制;为了更好说明本实施例,附图某些部件会有省略、放大或缩小,并不代表实际产品的尺寸;对于本领域技术人员来说,附图中某些公知结构及其说明可能省略是可以理解的。附图中描述位置关系仅用于示例性说明,不能理解为对本专利的限制。
如图1至图3所示,为一种三自由度杆件搬运机械臂,包括机架1以及位于机架1上的:夹持机构,用于夹持或者松开待搬运的杆件8;
平动机构,用于带动夹持机构沿水平方向移动;
转动机构,用于同时带动平动机构和夹持机构绕竖直轴线转动;
夹持机构安装在平动机构上,平动机构安装在转动机构上,转动机构通过设有的转动轴与机架1转动连接。
转动机构包括转动架2和转动电机22,转动轴连接在转动架2的两端,机架1在于转动轴对应的位置分别设有与转动轴匹配的接触轴承,转动轴与对应一端的接触轴承转动连接,转动电机22的机座安装在机架1的底部或顶部,转动电机22的输出轴与任意一根转动轴背对转动架2的一端固定连接且与转动轴位于同一竖直轴线上。
如图6和图7所示,平动机构包括导轨座17、导轨19、平动电机3和移动平台14,导轨座17安装在转动架2的中部,导轨19为光轴导轨19,导轨19位于导轨座17的一侧,移动平台14滑动连接在导轨19上,夹持机构安装在移动平台14上,平动电机3的机座安装在导轨座17的另一侧,导轨座17的两端均设有平动导向滑轮18,平动电机3的输出轴固定连接有平动集线轮24,平动集线轮24上绕设有平动绳索25,平动绳索25的两头分别从相反的方向跨过对应一端的平动导向滑轮18后从相对的方向固定连接在移动平台14上,导轨19所在直线与转动轴所在直线和平动电机3的输出轴所在直线均垂直。
如图4和图5所示,夹持机构包括设于移动平台14上的夹持驱动电机20、夹爪驱动绳索12、压线滑轮16、夹爪导向滑轮26、夹持末端绳索导向滑轮27和夹爪6,夹持驱动电机20的机座安装在移动平台14上,夹爪6位于移动平台14远离导轨座17的一侧,夹爪驱动绳索12一端连接夹持驱动电机20的输出轴、另一端跨过依次压线滑轮16和夹持导向滑轮与夹爪6连接;夹爪6数量为2个,2个夹爪6分别位于移动平台14远离导轨座17一侧的两端设有的夹座35上;压线滑轮16为阶梯滑轮;夹爪6包括2块用于形成夹持口的夹片7,夹片7的一端与夹座35转动连接,夹片7的与夹座35转动连接一端各自连接有1根夹爪驱动绳索12,夹座35与夹片7的连接位置还设有安装槽,安装槽安装有用于使夹紧后的夹片7复位的扭簧29,扭簧29的第一扭臂卡接在夹座35中、第二扭臂与夹片7连接,夹爪6中2块夹片7相对的一侧设有防滑纹;夹持驱动电机20的输出轴上设有夹持集线轮4,夹持集线轮4上设有4道集线槽,每道集线槽分别绕设有1根夹爪驱动绳索12,4根夹爪驱动绳索12同时跨在压线滑轮16后分别通过1个导向滑轮与对应的夹片7连接。
具体的,转动机构安装在机架1的一侧边上,相对于机架1转动,接触轴承包括转动架上角接触轴承31、转动架下角接触轴承34、转动架推力球轴承33;转动轴分为上转动轴32和下转动轴11;其中转动电机22、转动架上角接触轴承31、转动架上轴承座21安装在机架1上部,转动架下角接触轴承34、转动架推力球轴承33和转动架下轴承座10安装在机架1下部,均相对于机架1固定;转动架上转动轴32与转动架下转动轴11分别与转动架2顶部与底部相连,上转动轴32和下转动轴11与转动架2连接处使用方形接口配合防止打滑,转动架2绕上转动轴32和下转动轴11所在竖直轴线转动;转动架上转动轴32贯穿转动架上角接触轴承31与转动电机22相连接,转动架上角接触轴承31与转动电机22通过转动架上轴承座21固定在机架1上部;转动架下转动轴11贯穿转动架推力球轴承33和转动架下角接触轴承34,接触轴承均安装在转动架下轴承座10内部,转动架推力球轴承33安装在转动架2下部用于支撑转动架2,转动架下角接触轴承34安装在转动架推力球轴承33下部,用于支撑下转动轴11。
如图1和图2,移动平台14相对于转动机构做直线伸缩运动,其中导轨座17、平动导向滑轮18和平动电机3安装在转动架2上相对于转动架2静止;光轴导轨19安装在导轨座17上,为使平动系统稳定运动采用两组光轴导轨19的布置方式。直线轴承15安装在移动平台上,通过直线轴承15与光轴导轨19的配合可以实现移动平台14沿光轴导轨19进行直线运动,移动平台14相对于转动架2为直线伸缩运动;移动平台绳索固定端口23固定在移动平台14上,用于固定平动绳索25的两个末端;平动集线轮24安装在平动电机3上,随电机3转动,平动集线轮24对平动绳索25同时进行收和放,驱动左右两侧平动绳索25长度发生变化,一端伸长一端缩短,但平动绳索25总长保持不变;平动绳索25由移动平台绳索固定端口23引出,依次缠绕在转动架2近夹爪6侧的内侧和外侧的平动导向滑轮18、平动集线轮24、转动架2远夹爪6侧的外侧和内侧的平动导向滑轮18然后固定在移动平台绳索固定端口23。
如图1和图4,夹爪机构以移动平台14作为固定结构固定于移动平台14上并随平动机构实现伸缩运动;夹爪6由位于移动平台14末端的2块夹片7组成;其中,一个正夹片与一个反夹片组合成一个夹爪6,夹爪机构包括两个夹爪6对杆件8两端同时进行抓紧或松开,可提高杆件8抓取的稳定性。单个夹片7由位于夹片7上方和下方的夹爪末端角接触轴承28限制轴向运动,两个夹爪末端角接触轴承28分别安装在夹爪上轴承盖5、夹爪下轴承盖9和夹座35内,夹爪上轴承盖5、夹爪下轴承盖9固定在夹座35上。
在本实施例中,如图4和图5所示,夹片7侧边带有绳槽和夹爪绳索固定螺钉30,可限制夹爪驱动绳索12始终沿夹片7绳槽切线方向运动,防止绳索12长度发生变化。夹爪6夹紧由夹爪驱动绳索12驱动,夹爪驱动电机20安装在移动平台14远离夹爪6的一端,可降低夹爪端过重给移动平台14带来的弯曲力矩,夹片7与夹爪绳索集线轮4之间的绳索传动路径由多个滑轮进行改变。2块夹片7同时向内部运动时夹爪6夹紧杆件8,2块夹片7同时向外侧张开时夹爪6松开杆件8。
在本实施例中,一个夹片7由一根夹爪驱动绳索12驱动,驱动两个夹爪6运动需要4根夹爪驱动绳索12,夹爪驱动绳索12绕行路径依次为:夹爪绳索固定螺钉30、夹片7绳槽、夹爪末端绳索导向滑轮27、夹爪导向滑轮组13、压线滑轮16、夹爪绳索集线轮4,绳索两端分别固定于夹爪绳索固定螺钉30与夹爪绳索集线轮4;夹爪末端绳索导向滑轮27、夹爪导向滑轮组13与压线滑轮16的作用均为改变夹爪驱动绳索12的绕向路径,绳索12沿各个滑轮切线方向运动可防止绳索掉落,使电机20的驱动力能够传递到夹爪。夹爪6张开的恢复力由位于夹片7与夹座35之间的扭簧29提供,当夹爪驱动电机20转动放松绳索时,2块夹片7在弹力的作用下向外运动,实现夹爪6张开。夹爪导向滑轮组13由多个夹爪导向滑轮26构成,夹爪导向滑轮26布置高度根据夹爪末端绳索导向滑轮27与端面平行的中心平面高度进行设计。压线滑轮16为阶梯滑轮,在一个滑轮16上包含多个半径大小不一致的绳槽,绳槽半径大小由夹爪导向滑轮26的高度确定,其要求保证在夹爪绳索集线轮4转动过程中绳索12始终与压线滑轮16接触进而保证夹爪驱动绳索12不会滑落。夹片7与杆件8接触面由多段不同半径的弧线组成防滑纹,可稳定夹取多种不同半径大小的杆件8。
本实施例工作的一种方法为:转动机构中的转动电机22通过转动架上转动轴带动转动架2转动至所需的位置;随后平动电机3通过平动集线轮24转动控制平动绳索25一端收缩一端伸长,平动绳索25在4个平动导向滑轮18的作用下使移动平台14可以通过直线轴承15与光轴导轨19配合沿光轴导轨19进行直线运动。当移动平台14移动到合适位置后,夹爪驱动电机20驱动夹爪绳索集线轮4转动收紧夹爪驱动绳索12,4根夹爪驱动绳索12沿压线滑轮16、夹爪导向滑轮组13和夹爪末端绳索导向滑轮27的切线方向分别进入4个夹片7绳槽,然后拉动4个夹片7上的绳索固定螺钉30绕夹片7转动轴向杆件8转动。当杆件8夹紧后移动平台14与转动架2运动至目标位置,夹爪驱动电机20驱动夹爪绳索集线轮4放松夹爪驱动绳索12,4个夹片7在扭簧29的作用下向外张开放松杆件8,随后再按照相同的步骤继续下一根杆件8的搬运。
本实施例中夹爪机构安装在平动机构上,平动机构安装在转动机构上,转动机构安装在机架上,各个机构根据相应功能进行层次布置,布局更加合理,占用空间更小,运动灵活性更高,适合装配在移动性和体积大小要求较高的设备上。另外本实施例利用绳索传动控制夹爪实现夹紧动作,夹爪的张开由夹爪弹簧提供恢复力,有效减少了刚性传动件带来的空间占用大、重量大的问题,夹爪驱动电机布置在远离夹爪端的移动平台上可以减少夹爪对移动平台带来的扭转力矩;并且利用绳索传动实现对导轨滑块的驱动,驱动移动平台运动,相对于使用丝杠或齿轮传动,其结构更紧凑小巧;此外,绳索传动缓冲性好,容易维护,对硬件设备的损耗更小;本实施例提供的三自由度杆件搬运机械臂,可应用于但不仅限于小型钻探设备中钻杆搬运系统,具有较高的应用价值。
显然,本发明的上述实施例仅仅是为清楚地说明本发明所作的举例,而并非是对本发明的实施方式的限定。对于所属领域的普通技术人员来说,在上述说明的基础上还可以做出其它不同形式的变化或变动。这里无需也无法对所有的实施方式予以穷举。凡在本发明的精神和原则之内所作的任何修改、等同替换和改进等,均应包含在本发明权利要求的保护范围之内。
- 一种三自由度杆件搬运机械臂
- 一种三自由度杆件搬运机械臂