一种取药系统、基于其的机器人及控制方法
文献发布时间:2023-06-19 11:59:12
技术领域
本发明涉及医疗设备技术领域,尤其涉及药房药剂的自动化配送领域,且与并联柔 索驱动技术、智能驱动技术相交叉,具体是一种取药系统、基于其的机器人及控制方法。
技术背景
随着智能化和自动化水平的提高,开始有智能药柜设备出现,但是其需要对医院进行较大的改造,而大多数地区医院的就诊需求量不允许医院停下来去做药柜升级改 造。从而出现自动取药机器人的概念,自动取药机器人在现有医院药房与药柜的基础 上做自动化、智能化改造,能够及时的过渡,代替工作人员进行自动取药。
传统的串联六轴机械臂,其运动空间较小,尤其药柜的底层与最上层的高度差较大, 若增加臂展,又受限于药柜间的狭小空间。在专利CN110963221A一种自动取药机器人中,设计了一种可以替患者去取药的机器人,但其只实现了药品的运输,并能够代替工 作人员从药柜上取药的动作。在专利CN210910000U一种自动取药机器人中,设计了一 种能够代替人工完成取药的机器人,但是其机械臂加升降装置的结构易造成升降平台的 负载过大,从而稳定性较差等问题。
并联柔索驱动机构具有结构简单、动作响应快工作空间大的特点,适合大空间内操 控动平台的平动自由度,此外通过对动平台构型与柔索和动平台连接位置点的设计可以 获得更多的自由度,将多余的自由度转换成末端抓手的驱动力,则可以代替末端抓手的驱动电机。
发明内容
本发明目的就是为了弥补已有技术的缺陷,提供一种并联柔索驱动自动取药机器人 及其控制方法,采用柔索交叉连接的方式使动平台在固定的导向滑轮构型下获得了更大 的工作空间;通过对动平台采用分为可以相互转动的两部分的方式直接驱动末端抓手,避免了末端抓手的驱动电机,减小了动平台的负载。
本发明是通过以下技术方案实现的:
本发明所述的取药系统,由主体框架3、柔索驱动装置4、导向滑轮组5、动平台抓手6和柔索7组成;其中,
在主体框架3上设有柔索驱动装置4、导向滑轮组5;柔索7穿过导向滑轮组5,柔 索7的一端与柔索驱动装置4相连接,其另一端与动平台抓手6相连接;
主体框架3作为柔索驱动的静平台,是整个取药系统的基座;
柔索驱动装置4作为动力装置,为动平台抓手6的运动提供动力;
导向滑轮组5的作用是为柔索提供转向约束,规划柔索的路线走向;
动平台抓手6作为末端执行器,实现对目标的夹取与转移;
柔索7的作用为动力传输,实现柔索驱动装置4对动平台抓手6的控制。使用时, 在主体框架3可固定在每个药柜的前方,分别对药柜内的药品/药盒/药瓶进行抓取作业。
进一步说,在主体框架3的下方设有移动小车2;移动小车2的作用为搭载取药系统,通过磁性传感器检测地面上铺设的磁带的磁场偏差来导航,运动到特定的药柜前, 待取药系统完成取药任务后,运动至指定地点。
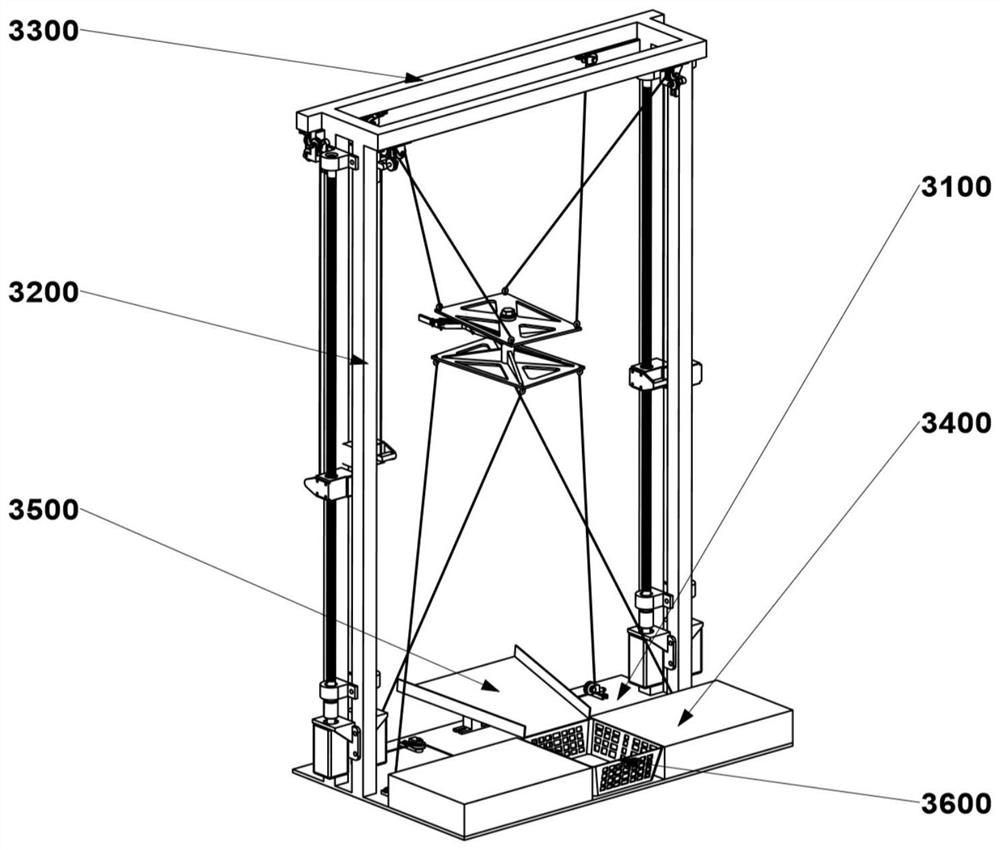
进一步说,主体框架3包括底板3100、立柱3200、横梁3300、电机防护罩3400、 滑道3500与药品盛放篮3600;在底板3100的顶面设有有4根立柱3200,相邻的立柱 3200之间安装有横梁3300,底板3100、立柱3200和横梁3300共同形成龙门架结构; 在横栏3300下方的底板3100上设有滑道3500;在底板3100上设有药品盛放篮3600, 位于滑道3500的出口侧。
更进一步说,在与药品盛放篮3600相邻的底板3100上设有电机防护罩3400;
更进一步说,滑道3500用于将夹取的药品送至药品盛放篮3600;药品盛放篮3600位于底板3100的一侧,电机防护罩3400、药品盛放篮3600位于底板3100的另一侧, 且药品盛放篮3600位于电机防护罩3400之间;药品盛放篮3600正对着滑道3500。
在底板3100上设有立柱3200;相邻立柱3200间设有横梁3300,立柱3200与横梁3300形成龙门架结构;优选的方案是:在底板3100沿着宽边分为两块矩形区域,一侧 矩形区域上设有4根立柱3200;立柱3200的上方设有“口”形横梁3300,立柱3200 与横梁3300形成龙门架结构;横栏3300的正下方设有滑道3500安装在底板3100上, 滑道3500一侧高一侧低,用于将夹取的药品送至药品盛放篮3600内;药品盛放篮3600 位于滑道3500的低口侧的另一矩形区域上;在另一矩形区域的剩余地方设有两个电机 防护罩3400,对称位于药品盛放篮3600的两侧。
进一步说,柔索驱动装置4包括滚珠丝杠驱动装置4100和卷筒驱动装置4200;滚珠丝杠驱动装置4100负责为与动平台抓手6的动平台上面板6050相连的柔索7提供牵 引力;卷筒驱动装置4200负责为与动平台抓手6的动平台下面板6060相连的柔索7提 供牵引力;滚珠丝杠驱动装置4100和卷筒驱动装置4200均安装在主体框架3上。
更进一步说,设有4组滚珠丝杠驱动装置4100和4组卷筒驱动装置4200;其中:4 组滚珠丝杠驱动装置4100分别安装在立柱3200的内外两侧;4组卷筒驱动装置4200 分别安装在电机防护罩3400下方的底板3100上;滚珠丝杠驱动装置4100,作为与动平 台抓手6的动平台上面板6050相连的4根柔索的动力装置,包括丝杠电机4101、丝杠 电机支座4102、联轴器4103、丝杠4104、丝杠支座4105、滚珠螺母4106和柔索牵引 座4107;连接关系为:丝杠电机4101与丝杠4104由联轴器4103连接,分别通过丝杠 电机支座4102与丝杠支座安4105装在立柱3200侧边;安装在丝杠4104上的丝杠螺母 4106以立柱3200的侧边作为导向,柔索牵引座4107安装在丝杠螺母4106上;卷筒驱 动装置4200作为与动平台抓手6的动平台下面板6060相连的4根柔索的动力装置,包 括卷筒电机4201、卷筒电机支座4202、联轴器4203、卷筒4204和卷筒支座4205;卷 筒电机4201与卷筒4204由联轴器4203连接,分别通过卷筒电机支座4202与卷筒支座 4205安装在底板3100上。
进一步说,导向滑轮组5包括横向偏心滑轮5100、纵向偏心滑轮5200、横向转向 滑轮5300、纵向转向滑轮5400和平移转向滑轮5500;每根柔索7都有一组滑轮来导向。 共8组,依次称为:第一滑轮组、第二滑轮组、第三滑轮组、第四滑轮组、第五滑轮组、 第六滑轮组、第七滑轮组、第八滑轮组,其中每两组关于主体框架3的对称面对称,故 共有4组导向滑轮组:第一滑轮组与第五滑轮组针对主体框架3的对称面对称、第二滑 轮组与第六滑轮组针对主体框架3的对称面对称、第三滑轮组与第七滑轮组针对主体框 架3的对称面对称、第四滑轮组与第八滑轮组针对主体框架3的对称面对称。
在立柱3200和横梁3300构成的“龙门架”下的大约中心位置作为观察点,以横梁3300的位置为上,药品盛放篮3600侧为右来描述,左上方为第一滑轮组、右上方为第 二滑轮组、左下方为第三滑轮组、右下方为第四滑轮组;
左上方的第一滑轮组里包含三个滑轮:横向偏心滑轮5100、纵向转向滑轮5400、平移转向滑轮5500;其中,第一滑轮组内的横向偏心滑轮5100安装在左横梁下方;第 一滑轮组内的纵向转向滑轮5400与前述横向偏心滑轮5100对齐,安装在横向偏心滑轮 5100的前面并与横栏3300的一端对齐;第一滑轮组内的平移转向滑轮5500安装在立柱 3200的前侧面;
右上方的第二滑轮组里包含两个滑轮:纵向偏心滑轮5200和平移转向滑轮5500;其中,第二滑轮组内纵向偏心滑轮5200安装在右横栏下方,且比第一滑轮组的横向偏 心滑轮5100靠前,以至于二者的连线与横梁3300的长边存在一定的夹角,该夹角在30 至90°之间;第二滑轮组内的平移转向滑轮5500安装在立柱3200的后侧面;
左下方的第三滑轮组里包含两个滑轮:横向偏心滑轮5100和横向转向滑轮5300;其中,第三滑轮组内横向偏心滑轮5100安装在底板3100上,且位于第一滑轮组的横向 偏心滑轮5100的正下方,第三滑轮组内横向转向滑轮5300安装在底板3100上,左右 方向与横向偏心滑轮5100对齐,位于其后面;
右下方的第四滑轮组里包含两个滑轮:横向偏心滑轮5100和横向转向滑轮5300;其中,第四滑轮组内的横向偏心滑轮5100安装在底板3100上,且位于第二滑轮组的纵 向偏心滑轮5200的正下方,第四滑轮组内横向转向滑轮5300安装在底板3100上,左 右方向与横向偏心滑轮5100对齐,位于其后面。
进一步说,横向偏心滑轮5100包括滑轮座5101、滑轮支架5102、滑轮5103、轴肩 螺钉5104、挡圈5105和六角螺母I5106;
滑轮支架5102的转轴与滑轮座5101的孔配合安装,通过六角螺母I5106固定,轴肩螺钉5104依次穿过滑轮支架5102的一边侧板、挡圈5015、滑轮5103、挡圈5105和 支架的另一边侧板,并用六角螺母I5106紧固。由于滑轮支架5102的偏心结构,能够 使滑轮5103在柔索7输入方向变化时绕滑轮支架5102的轴转动,而保证柔索7的输出 方向不变,即动平台在运动中柔索始终在滑轮的滑槽里。
进一步说,动平台抓手6包括吊耳6010、转轴6020、六角螺母II6030、止推轴承6040、动平台上面板6050、动平台下面板6060、三孔连杆6070、平行连杆6080、中间 连杆6090、夹爪手指6100、拉力弹簧6110和销钉6120;
其中,转轴6020依次穿过止推轴承6040、动平台上面板6050、动平台下面板6060、止推轴承6040,由六角螺母II6030紧固,这样动平台上、下面板间存在着绕转轴相互 转动的自由度;
三孔连杆6070、平行连杆6080、夹爪手指6100和拉力弹簧6110各有两个,呈对 称放置;两个三孔连杆6070的中孔与中间连杆6090的端孔同心连接;平行连杆6080 的同一端孔与中间连杆6090的另一个端孔同心连接;三孔连杆6070的较长边的孔、夹 爪手指6100的端孔连接;平行连杆6080的另一个端孔与夹爪手指6100的另一个孔连 接;所有连杆的孔都由销钉6120连接。这样两个三孔连杆、平行连杆、夹爪手指和一 个中间连杆构成了两个平行四边形机构。两个三孔连杆剩余的孔各自与动平台上、下面 板的连杆连接。两个拉力弹簧6110分别卡在连接两个三孔连杆6070的销钉6120与连 接平行连杆6080和夹爪手指6100的销钉6120,其拉力保持着夹爪张开的趋势,并且保 持中间连杆6090的对中性;吊耳6010分别安装在动平台面板的四角的预留空位,用于 连接柔索7。所述安装方式,在动平台上面板6050、动平台下面板6060绕转轴6020产 生相对转动时,能够驱动夹爪的加紧与放松。
进一步说,柔索7共有8根,分为4根牵引动平台上面板6050的上牵引柔索和4 根牵引动平台下板面6060的下牵引柔索;8根柔索7依次标记为:1号柔索7100、2号 柔索7200、3号柔索7300、4号柔索7400、5号柔索7500、6号柔索7600、7号柔索7700、 8号柔索7800;
将在立柱3200和横梁3300构成的“龙门架”下的大约中心位置作为观察点,以横梁3300的位置为上,药品盛放篮3600侧为右来描述。
与导向滑轮组5中的第一滑轮组对应的有:1号柔索7100从动平台上面板6050右前方的吊耳6010开始,依次通过第一滑轮组的横向偏心滑轮5100、纵向转向滑轮5400 和平移转向滑轮5500,最后固定在立柱3200前侧的丝杠螺母4106上的柔索牵引座4107 上;
与导向滑轮组5中的第二滑轮组对应的有:2号柔索7200从动平台上面板6050的左前方的吊耳6010开始,依次通过第二滑轮组的纵向偏心滑轮5200和平移转向滑轮 5500,最后固定在立柱3200后侧的丝杠螺母4106上的柔索牵引座4107上;
与导向滑轮组5中的第三滑轮组对应的有:3号柔索7300从动平台下面板6060的右前方的吊耳6010开始,依次经过第三滑轮组的横向偏心滑轮5100和横向转向滑轮 5300,最后连接在卷筒驱动装置4200上;
与导向滑轮组5中的第四滑轮组对应的有:4号柔索7400从动平台下面板6060的左前方的吊耳6010开始,依次经过第四滑轮组的横向偏心滑轮5100和横向转向滑轮 5300,最后连接在卷筒驱动装置4200上;5号柔索7500、6号柔索7600、7号柔索7700、 8号柔索7800分别与1号柔索7100、2号柔索7200、3号柔索7300、4号柔索7400关 于主体框架3的对称面对称;
如此交叉连接可以使得动平台具有更大的可达空间,当4根上牵引柔索牵引动平台 上面板6050顺时针转动,4根下牵引柔索牵引动平台下面板6060逆时针转动时,实现 了夹爪的夹紧动作。
进一步说,移动小车2包括车身2010、转向前轮2020、转向装置2030、驱动后轮2040、驱动装置2050、电源2060、上位机2070、无线通信模块II2080、控制模块2090、 方向检测装置2100;
转向装置2030和驱动装置2050分别安装在车身2010的底部;转向前轮2020安装在转向装置2030上;驱动后轮2040安装在驱动装置2050上;转向装置2030、驱动装 置2050、电源2060、上位机2070、无线通信模块II2080和控制模块2090都封装在车 身2010内部;方向检测装置2100安装在车身2010的前端靠下的位置。
方向检测装置2100检测地面上铺设的磁带的磁场的偏差,将偏差信息传送给上位机2070,上位机2070将处理好的方向纠正信号传送给控制模块2090,控制模块2090 调整转向装置2030和驱动装置2050实现按预定轨迹导航。同时上位机2070在每次任 务中记录行驶历程,结合预定的轨迹路线,实时更新当前位置,当到达指定地点时,停 止运动。
进一步说,本取药系统安置在药品货架前,并固定主体框架3的位置,通过对药品货架各层药品盒具体的位置建模和取药系统的夹爪对药品货架位置的标定,能够实现取药系统对药品货架的直接取药;即取药系统与药品货架一对一配合,实现取药工作。
进一步说,取药系统用于从药品货架上取药,移动小车2用于将取药系统移动至指定的药品货架前以及返回。上位机2070对空间内每个药品货架的位置和每个药品货 架上各种药品盒的位置进行建模,对移动小车2当前位置进行标定,对动平台夹爪6在 工作空间里的位置进行标定;预先铺设导航磁带回路,保证能够遍历所有药品货架前。 当移动小车2在按照导航磁带移动时,上位机2070实时更新小车的位置坐标,到达指 定药品货架时停止移动。当动平台夹爪6运动时,上位机2070同样实时更新其空间位 置,按照当前药品货架的药品位置信息检索到所需药品位置时,动平台夹爪6对应的去 夹取,从而实现自动取药。
更进一步说,在动平台上面板6050和/或动平台下面板6060上设有摄像头;在动平台上面板6050或动平台下面板6060上设有RFID读取器;在药品盛放篮3600的底部 设有RFID读取器;在动平台上面板6050和药品盛放篮3600上均设有蜂鸣器和LED灯; 前述摄像头、RFID读取器、蜂鸣器和LED灯均与移动小车2内的电源2060、上位机2070 相互连接。
所有药剂盒、药瓶均在入库点检时均贴有RFID电子标签;所有药剂盒、药瓶的三维图均录入系统。
在取药时,由动平台上面板6050和/或动平台下面板6060上的摄像头获取图像并传递至上位机2070;动平台上面板6050或动平台下面板6060上的RFID读取器读取RFID 电子标签信息并传递至上位机2070;由上位机2070进行比对,如果数据不一致,则动 平台上面板6050上的蜂鸣器和LED灯发出警示,同时停止后续造作,等待人工检查。 反之,进行后续工作。
盛放药品时,在药品盛放篮3600底部的RFID读取器读取RFID电子标签信息并传递至上位机2070;由上位机2070对药品盛放篮3600内存放的药品类型、数量与之前由 动平台上面板6050和/或动平台下面板6060上的摄像头、RFID读取器传递至上位机2070 的数据进行比对,如果数据不一致,则药品盛放篮3600上的蜂鸣器和LED灯发出警示, 同时停止后续造作,等待人工检查。反之,进行后续工作。
基于本发明所述的取药系统的机器人,包括一个操作台1;操作台1包括立式操作柜1100、显示屏1200、IC卡读卡器1300、无线通信模块I1400、网络连接模块1500、 主计算机1600和电源1700。
显示屏1200安装在立式操作柜1100的倾斜面上;IC卡读卡器1300嵌入在显示屏1200下的立式操作柜1100表面,卡槽朝外。无线通信模块I1400、网络连接模块1500、 主计算机1600与电源1700封闭与操作台1内部。显示屏1200、IC读卡器1300、无线 通信模块I1400和网络连接模块1500分别于主计算机1600相连,进行通信。
操作台1的主计算机1600通过IC卡读卡器1100读取患者就诊卡里的药品信息, 并显示于显示屏1200上,当患者确认取药并支付成功后,将药品信息、药品货架信息 及规划的路径信息通过无线通讯模块I1400发送给移动小车2的无线通讯模块II2080。 无线通讯模块II2080将信息传送给上位机2070,上位机2070根据目标药品的货架位置 坐标与移动小车2当前的位置,通过控制模块2090发送指令给转向装置2030和驱动装 置2050;当移动小车2到达指定货架时,上位机2070根据目标药品在货架上的具体位 置坐标与动平台抓手6的当前的位置,通过控制模块2090发送指令给柔索驱动装置4, 实现取药。
本发明所述的机器人的控制方法(其一),按如下步骤进行:
①患者将就诊卡插入读卡器,屏幕界面显示药品信息,可选择是否结算取药;
②当结算成功后,操作柜里的计算机检索所储存的药品位置信息,将货架上目标药 品的具体位置坐标通过无线通信模块发送给上位机;
③上位机通过无线通信模块接收信息,上位机计算到达药品所在位置的动平台抓手 运动轨迹,发送指令给控制模块,控制模块通过柔索驱动装置控制动平台抓手的平动与抓取药品,并放置到药品盛放篮内;
④更新药品库存信息,更新待取药品列表,若仍有药品待取,重复执行③;若药品已取完,屏幕界面显示“已完成操作”字样,并进入下一步;
⑤当患者将就诊卡从读卡器拔出,机器人复位。
本发明所述的机器人的控制方法(其二),按如下步骤进行:
①患者将就诊卡插入读卡器,屏幕界面显示药品信息,可选择是否结算取药;
②当结算成功后,操作柜里的计算机检索当前所储存的药品位置信息,将药品信息、 药品所在货架的位置信息和药品在货架上的具体位置信息通过无线通信模块I发送给移 动小车的上位机;
③移动小车通过无线通信模块II接收信息,上位机计算移动小车到达药品所在货架的运动轨迹,通过控制模块发送信号给转向装置和驱动装置,从而控制移动小车跟随 磁带导航前行,根据电机编码器反馈实时更新移动小车的位置坐标,与目标坐标进行比 较,实现半闭环控制移动小车到达指定货架前停留;
④上位机计算动平台抓手到达货架上药品具体位置的运动轨迹,通过控制模块发送 指令给柔索驱动装置,根据电机编码器反馈实时更新动平台抓手的位置坐标,与目标坐标进行比较,实现半闭环控制平台抓手的空间平动及抓取药品,并将抓取的药品放置在 药品盛放篮内;
⑤更新药品库存信息,更新待取药品列表,若仍有药品待取,重复执行步骤③和④;
⑥移动小车返回初始点,完成取药,由工作人员核对后交给患者;
⑦当患者将就诊卡从读卡器拔出,机器人复位。
本发明的优点是:
1、本发明采用柔索之间异面交叉连接动平台吊耳的方式,在导向滑轮狭小的构型下,增大了动平台的工作空间;
2、本发明将动平台分为上下两个可绕公共轴转动的部分,通过上下各4根柔索来驱动上下两部分的相对转动,从而直接驱动末端抓手的动作,避免了单独驱动抓手的电机;
3、本发明设计的横向偏心滑轮能够使其跟随柔索牵引力的方向变化而转动,保证了柔索始终在滑槽内,避免柔索与滑轮的侧向作用力,甚至滑脱滑槽的现象;
4、本发明采用操作台与自动取药机器人分开,增加无线通信的方式,便于将来拓展到多个操作台对应多个自动取药机器人,实现机器人面对多任务的智能调度,从而提 高效率。
附图说明
图1是本发明的整体示意图;
图2是图1中操作台和移动小车的组成示意图;
图3是图1中主体框架的立体示意图;
图4是图1中柔索驱动装置和柔索的立体示意图;
图5是图4中滚珠丝杠驱动装置和卷筒驱动装置的立体示意图;
图6是图1中导向滑轮组(上)的立体示意图;
图7是图1中导向滑轮组(下)的立体示意图;
图8是图6中横向偏心滑轮的立体示意图;
图9是图1中动平台抓手的立体示意图;
图10是图1中动平台抓手的另一视角;
图11是该并联柔索驱动自动取药机器人的控制流程图。
具体实施方式
现结合附图详细说明本发明的技术特点。
结合图1、2、3、4、6、7和9,一种并联柔索驱动自动取药机器人,由操作台1、 移动小车2、主体框架3、柔索驱动装置4、导向滑轮组5、动平台抓手6和柔索7组成。
结合图2,进一步说,操作台1包括立式操作柜1100、显示屏1200、IC卡读卡器1300、无线通信模块1400、网络连接模块1500、主计算机1600和电源1700。无线通信 模块1400、网络连接模块1500、主计算机1600与电源1700安装于操作台1内部。操 作台1通过IC卡读卡器1100读取患者就诊卡里的药品信息,并显示于屏幕上,当患者 确认取药并支付成功后,将药品信息、药品货架信息及规划的路径信息发送给移动小车 2。
结合图2,进一步说,移动小车2包括车身2100、前转向轮2200、转向装置2300、 后驱动轮2400、驱动装置2500、电源2600、计算机2700、无线通信模块2800、电机驱 动器2900。转向装置2300、驱动装置2500、电源2600、计算机2700、无线通信模块 2800和电机驱动器2900都封装在车身2100内部。
结合图3,进一步说,主体框架3包括底板3100、立柱3200、横梁3300、电机防 护罩3400、滑道3500与药品盛放篮3600。底板3100的左侧安装有4根立柱3200,立 柱3200的上方安装有横梁3300,形成龙门架结构,横栏3300的正下方由滑道3500安 装在底板3100上,用于将夹取的药品送至药品盛放篮3600;右侧安装有两个电机防护 罩3400,药品盛放篮3600放置在两个防护罩中间,其右侧正对着滑道3500。
结合图4、图5,进一步说,柔索驱动装置4包括有4组滚珠丝杠驱动装置4100分 别安装在立柱3200的内外两侧、4组卷筒驱动装置4200分别安装在电机防护罩3400 下方的底板3100上。其中滚珠丝杠驱动装置4100,作为上面4根柔索的动力源,包括 丝杠电机4101、丝杠电机支座4102、联轴器4103、丝杠4104、丝杠支座4105、滚珠螺 母4106和柔索牵引座4107。丝杠电机4101与丝杠4104由联轴器4103连接,分别通过 丝杠电机支座4102与丝杠支座安4105装在立柱3200侧边。安装在丝杠4104上的丝杠 螺母4106以立柱3200的侧边作为导向,柔索牵引座4107安装在丝杠螺母4106上。
其中,卷筒驱动装置4200作为下面4根柔索的动力源,包括卷筒电机4201、卷筒 电机支座4202、联轴器4203、卷筒4204和卷筒支座4205。卷筒电机4201与卷筒4204 由联轴器4203连接,分别通过卷筒电机支座4202与卷筒支座4205安装在底板3100上。
结合图6、图7,进一步说,导向滑轮组5包括横向偏心滑轮5100、纵向偏心滑轮5200、横向转向滑轮5300、纵向转向滑轮5400和平移转向滑轮5500。每根柔索7都有 一组滑轮来导向,共8组,其中每两组关于小车前后方向的截面对称,故共有4组不同 导向滑轮组。
其中,以移动小车2的前进方向,定义前后左右的描述下,左上方的第一滑轮组里包含三个滑轮,横向偏心滑轮5100安装在左横梁下方,纵向转向滑轮5400与横向偏心 滑轮5100对齐,安装在横向偏心滑轮5100的前面并与横栏3300的一端对齐,平移转 向滑轮5500安装在立柱3200的前侧面;右上方的第二滑轮组里包含两个滑轮,纵向偏 心滑轮5200安装在右横栏下方,比第一滑轮组的横向偏心滑轮5100靠前,以至于二者 的连线与横梁3300的长边有60度夹角,平移转向滑轮5500安装在立柱3200的后侧面; 左下方的第三滑轮组里包含两个滑轮,横向偏心滑轮5100安装在底板3100上,位于第 一滑轮组的横向偏心滑轮5100的正下方,横向转向滑轮5300安装在底板3100上,左 右方向与横向偏心滑轮5100对齐,位于其后面;右下方的第四滑轮组里包含两个滑轮, 横向偏心滑轮5100安装在底板3100上,位于第二滑轮组的纵向偏心滑轮5200的正下 方,横向转向滑轮5300安装在底板3100上,左右方向与横向偏心滑轮5100对齐,位 于其后面。
结合图8,进一步说,横向偏心滑轮5100包括滑轮座5101、滑轮支架5102、滑轮5103、轴肩螺钉5104、挡圈5105和六角螺母5106。滑轮支架5102的转轴与滑轮座5101 的孔配合安装,通过六角螺母5106固定,轴肩螺钉5104依次穿过滑轮支架5102的侧 板、挡圈5015、滑轮5103、挡圈5105和支架的另一个侧板,并有六角螺母5106紧固。 由于滑轮支架5102的偏心结构,能够使滑轮5103在柔索7输入方向变化时绕滑轮支架 5102的轴转动,而保证柔索7的输出方向不变,即动平台在运动中柔索始终在滑轮的滑 槽里。
结合图9、图10,进一步说,动平台抓手6包括吊耳6010、转轴6020、六角螺母 6030、止推轴承6040、动平台上面板6050、动平台下面板6060、三孔连杆6070、平行 连杆6080、中间连杆6090、夹爪手指6100、拉力弹簧6110和销钉6120。
其中,转轴6020依次穿过止推轴承6040、动平台上面板6050、动平台下面板6060、止推轴承6040,由六角螺母6030紧固,这样动平台上、下面板间存在着绕转轴相互转 动的自由度。三孔连杆6070、平行连杆6080、夹爪手指6100和拉力弹簧6110各有两 个,呈对称放置;两个三孔连杆6070的中孔与中间连杆6090的端孔同心连接;平行连 杆6080的同一端孔与中间连杆6090的另一个端孔同心连接;三孔连杆6070的较长边 的孔、夹爪手指6100的端孔连接;平行连杆6080的另一个端孔与夹爪手指6100的另 一个孔连接;所有连杆的孔都由销钉6120连接。这样两个三孔连杆、平行连杆、夹爪 手指和一个中间连杆构成了两个平行四边形机构。两个三孔连杆剩余的孔各自与动平台 上、下面板的连杆连接。两个拉力弹簧6110分别卡在连接两个三孔连杆6070的销钉6120 与连接平行连杆6080和夹爪手指6100的销钉6120,其拉力保持着夹爪张开的趋势,并 且保持中间连杆6090的对中性。吊耳6010分别安装在动平台面板的四角的预留空位, 用于连接柔索7。所述安装方式,在动平台上、下面板产生转角时,能够驱动夹爪的加 紧与放松。
结合图4、图5、图6和图7,进一步说,柔索7共有8根,分为4根牵引动平台上 面板的上牵引柔索和4根牵引动平台下板面的下牵引柔索。
其中,以移动小车2的前进方向,定义前后左右的描述下,与第一滑轮组对应的有,1号柔索7100从动平台上面板6050右前方的吊耳6010开始,依次通过第一滑轮组的横 向偏心滑轮5100、纵向转向滑轮5400和平移转向滑轮5500,最后固定在立柱3200前 侧的丝杠螺母4106上的柔索牵引座4107上;与第二滑轮组对应的有,2号柔索7200 从动平台上面板6050的左前方的吊耳6010开始,依次通过第二滑轮组的纵向偏心滑轮 5200和平移转向滑轮5500,最后固定在立柱3200后侧的丝杠螺母4106上的柔索牵引 座4107上;与第三滑轮组对应的有,3号柔索7300从动平台下面板6060的右前方的吊 耳6010开始,依次经过第三滑轮组的横向偏心滑轮5100和横向转向滑轮5300,最后连 接在卷筒驱动装置4200上;与第四滑轮组对应的有,4号柔索7400从动平台下面板6060 的左前方的吊耳6010开始,依次经过第四滑轮组的横向偏心滑轮5100和横向转向滑轮 5300,最后连接在卷筒驱动装置4200上。如此交叉连接可以使得动平台具有更大的可 达空间,当4根上牵引柔索牵引动平台上面6050板顺时针转动,4根下牵引柔索牵引动 平台下面板6060逆时针转动时,实现了夹爪的加紧动作。
结合图11,本发明所述的一种并联柔索驱动自动取药机器人的控制方法包括有以下 步骤:
①患者将就诊卡插入读卡器,屏幕界面显示药品信息,可选择是否结算取药;
②当结算成功后,操作台里的计算机检索所储存的药品位置信息,并为移动小车生 成路径,将药品信息、药品位置信息和路径信息通过无线通信模块发送给移动小车;
③移动小车通过无线通信模块接收信息,运动控制器计算到达药品所在货架的小车 运动轨迹,发送给电机驱动器,电机驱动器控制移动小车的驱动与转向电机到达指定货架前停留;
④运动控制器计算动平台抓手到达货架上药品位置的运动轨迹,发送给控制柔索的 电机驱动器,通过对柔索的收放控制动平台抓手的平动及抓取药品,并放置在药品盛放篮内;
⑤若仍有药品待取,重复执行③④;
⑥移动小车返回初始点,完成取药。
- 一种取药系统、基于其的机器人及控制方法
- 一种基于机器人视觉的画眉机器人系统的控制方法