一种基于麦克风阵列的声源成像方法
文献发布时间:2023-06-19 12:00:51
技术领域
本发明涉及声学成像领域,尤其涉及一种基于麦克风阵列的声源成像方法。
背景技术
随着工业化进程不断加快,人们对于设备检测需求随之不断提高,在工业生产中,噪声源定位一直是关注的重点,快速准确的发现声源位置可以提高设备的检测效率,降低检测成本。
近几年,基于麦克风阵列的声源定位技术近年来成为研究的热点,声源定位是通过多个麦克风接收音频信号,经过处理后反映声源的方位。现有声源定位产品一般采用时延估计的方法进行声源定位,通过计算不同麦克风之间的接收信号的延迟,然后通过时延与方位角的关系确定声源的位置。该方法对麦克风接收信号的精确度要求较高,且当麦克风阵列面积较小时,定位精度会有所降低。而实际应用场景中,大型阵列会存在操作和使用不便性,往往小型阵列在操作起来更加方便。当声源定位场景中存在多种背景噪声干扰时,在检测时需要排除这些干扰因素,否则会影响声源定位结果的准确性。
公开号为CN112198474A的专利文献公开了一种声源定位方法、装置、介质和设备。根据本发明实施例提供的方案,可以在确定出的声源方向既包括真实声源方向,又包括镜像声源方向,无法确定哪个声源方向为真实声源的方向时,通过进行DOA估计确定每个声源方向对应的谱峰,或者通过进行波束形成,确定每个声源方向对应的声源波束信号的相对延迟的绝对值,来确定真实声源方向。使得声源波束存在强反射的情况下,仍然可以确定声源真实方向。但该方法着重解决声音因反射形成的镜像声源问题,仍然容易受到其他外界因素的干扰。
发明内容
本发明要解决的技术问题是:现有声源定位方法的定位结果易受外界因素干扰问题。为解决上述技术问题,本发明提供一种基于麦克风阵列的声源成像方法,包括以下步骤:
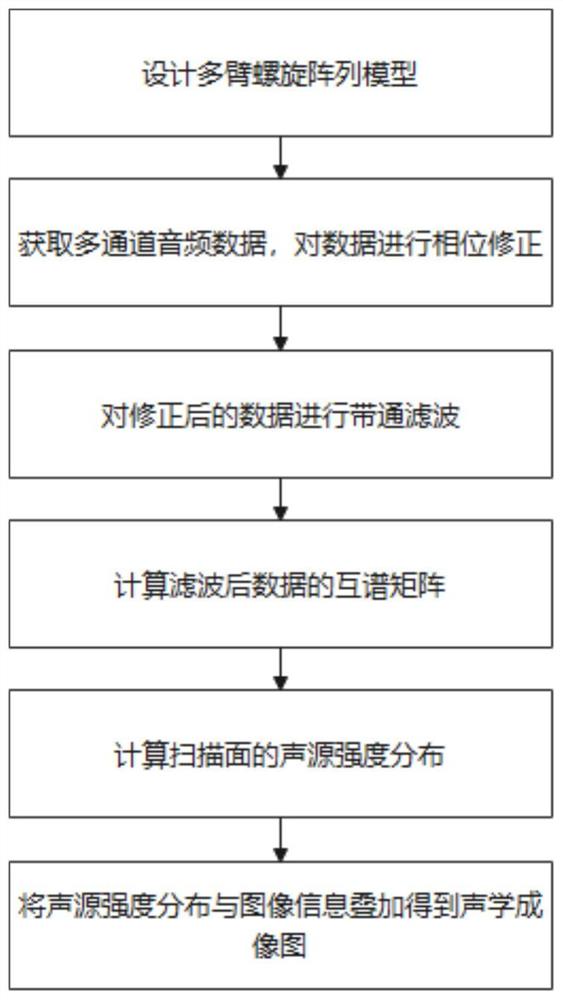
S1:由多臂螺旋阵列组成多通道麦克风阵列,通道数为N;
S2:通过麦克风阵列采集N个通道的原始音频数据;
S3:对原始音频数据进行相位修正;
S4:对修正后的音频数据进行处理,得到复数矩阵R’;
S5:根据麦克风阵列坐标确定扫描面上各点的坐标;
S6:计算扫描面到阵列面的导向向量并根据互谱矩阵R得到扫描面的声源强度分布图;
S7:将声源强度分布图与视频图像叠加处理得到实时的声学成像图。
作为优选,步骤S4的处理过程包括:
S401.获取N个通道的音频数据,数据长度为M,逐一对每个通道的音频数据进行带通滤波,数据的长度M为2的整数次幂;
S402.对滤波后的每个通道数据分别进行FFT计算,得到N*M大小的复数矩阵P,选取参考通道,并计算出FFT后幅值最大位置的频率点f0,参考通道选择传声器阵列中距离阵列中心点最近的一个通道;
S403.从矩阵P中选取频率f0对应的N个值组成列向量Xfi,再计算得到互谱矩阵R;
S404.计算矩阵R的除自谱矩阵R’。
作为优选,所述步骤S3相位修正预先采集远场声音数据,采用互相关估计法计算各个通道之间的相位差,然后对采集到的音频数据进行修正。
作为优选,所述步骤S401带通滤波对N个通道的数据逐一进行FIR带通滤波,根据需要进行带通滤波器的左右截止频率的调整。默认左右截止频率分别为:20kHz与35kHz。
作为优选,所述步骤S403计算得到互谱矩阵包括以下步骤:列向量Xfi大小为1*N,计算列向量Xfi的共轭转置矩阵Xfi’,得到互谱矩阵R。互谱矩阵R=Xfi*Xfi’,互谱矩阵R的大小为N*N。为了消除麦克风自身存在的干扰,对互谱矩阵R进行除自谱处理,将矩阵R中的对角线元素变为0,得到除自谱后的矩阵R’。
作为优选,步骤S6具体包括:S601.根据麦克风阵列的空间坐标确定扫描面上各点的坐标;扫描面在阵列面的正前方一定位置,扫描面的中心与麦克风阵列面的中心在一条直线上。
S602.计算扫描面上每个点与麦克风阵列之间的导向向量b,导向向量为一维列向量,大小维1*N;
S603.根据导向向量b及除自谱矩阵R’计算出扫描面上各点的声源强度,进而形成声源强度分布图。
作为优选,本发明还包括以下步骤:S8.对声源强度分布图进行插值处理得到插值后的声源强度分布。对声源强度分布采用样条插值方法进行细化,进一步提高了声源强度的分辨率,降低了算法运算的算力。
本发明的实质性效果是:
1、实现声音的可视化,将声音强度分布与视频图像叠加,不同声压级大小对应不同颜色使声源成像更加直观与形象。
2、对原始采集的音频数据进行相位修正,以排除相位初始偏差的干扰。
3、为了消除其他背景噪声干扰,准确识别超声声源位置,采用带通滤波对原始音频数据进行滤波处理。
4、对麦克风音频数据的互谱矩阵进行除自谱处理,消除了麦克风之间的干扰。
5、对计算后的扫描面采用插值方法提高声源强度分布图的分辨率,降低了算法算力,在保证结果的同时,提高了计算效率。
附图说明
图1是实施例一的流程图。
图2是实施例一带通滤波过程流程图。
具体实施方式
下面通过具体实施例,并结合附图,对本发明的具体实施方式作进一步具体说明。
实施例如图1~2所示,包括以下步骤:
步骤S1:首先设计N个通道的多臂螺旋阵列;
步骤S2:再通过多通道麦克风采集原始音频数据;
步骤S3:对原始音频数据进行修正;通过计算远场信号时各个通道的互相关估计来获得修正值,公式如下:
其中:x1和x2分别表示需要进行互相关估计的两路信号。
步骤S4:对通道原始音频数据进行预处理,得到滤波后的数据。数据预处理步骤如下:
(1)每个通道的数据长度M,M为2的整数次幂,为了保证所分析数据的准确性,数据长度M最低为512。
(2)设定阶数固定的FIR带通滤波器,获取带通滤波器的左右截止频率,左右截止频率的默认值为:20kHz和35kHz,滤波器的左右截止频率可以改变;
(3)根据左右截止频率对音频数据进行滤波,得到每个通道带通滤波后的数据,并计算参考通道带通滤波后的FFT幅值最大点对应的频率为f0。
步骤S5:对滤波后的数据进行FFT分析,在进行FFT分析时,选用的窗函数为汉宁窗,每一个通道得到FFT后的复数数据,选取频率点f0位置所对应的复数点,得到复数矩阵Xfi,如下:
[a
其中a、b为实数,i为虚数单位,m的范围为1到M。
步骤S6:取复数矩阵Xfi的共轭转置矩阵Xfi’,Xfi与Xfi’相乘得到互谱矩阵R,互谱矩阵R如下:
其中c、d为实数。
为了消除自身麦克风的干扰,采用消除自谱的方法,即对R矩阵进行处理,使其对角线元素为0,经过处理后的的互谱矩阵为R’,表示如下:
步骤S7:设定扫描面的范围,根据扫描面的空间坐标与麦克风阵列的空间坐标计算每个扫描点的导向向量br,导向向量的大小为1*M。
步骤S8:将每个扫描点的导向向量与处理后的互谱进行相乘,具体步骤如下:
(1)计算导向向量的共轭转置br’;
(2)将br’与互谱矩阵R’的每一行进行点乘,再求和,得到中间矩阵;
(3)将中间矩阵与br进行点乘,再求和,所得结果为每个扫描点上的声源强度。
步骤S9:对扫描面上的每个点重复步骤S8,最终得到整个扫描面上的声源分布。
步骤S10:通过高清摄像头同步采集图像数据,在设计螺旋平面阵列时,中间位置留有摄像头放置区域,将摄像头放置于螺旋麦克风阵列的中心,实时拍摄视频数据,将每次拍摄的图像与声源强度分析结果进行叠加,形成声源成像图,直观的分析出声源所在的位置。
以上的实施例只是本发明的一种较佳的方案,并非对本发明作任何形式上的限制,在不超出权利要求所记载的技术方案的前提下还有其它的变体及改型。
- 一种基于麦克风阵列的声源成像方法
- 基于麦克风阵列的声源定位时延估计方法、声源定位系统